引言:无处不在的运动传感器
当我们旋转手机屏幕、计步器记录步数,或是现代汽车触发安全气囊时,背后都有一个关键的传感器在默默工作------MEMS加速度计。这种微机电系统传感器已经成为智能设备中最普及的传感器之一 ,全球年出货量超过100亿颗 。从消费电子到工业应用,从医疗设备到基础设施监测,MEMS加速度计正以其小尺寸、低功耗、低成本的特性改变着我们感知物理世界的方式。
一、MEMS加速度计技术原理深度解析
1.1 基本工作原理
MEMS加速度计基于牛顿第二定律,通过检测质量块在加速度作用下产生的惯性力来测量加速度。其核心物理原理可表示为:
F = m × a
其中惯性力F导致质量块发生位移,通过测量该位移即可反推加速度a的大小。
1.2 主要技术路线对比
电容式加速度计
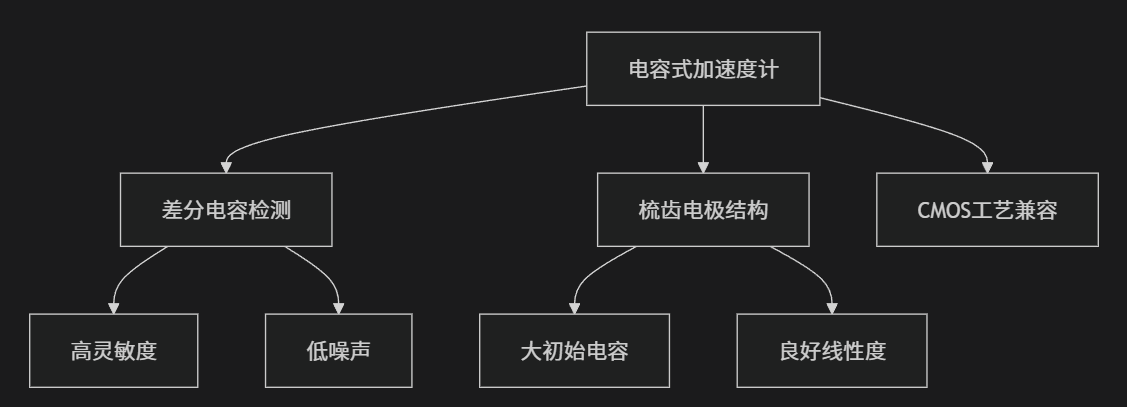
技术特点:
-
检测机制:质量块位移引起电容变化
-
灵敏度:可达5-50 fF/g
-
噪声密度:典型值25-100 μg/√Hz
-
优势:直流响应、低功耗、高稳定性
压阻式加速度计
-
工作原理:利用压阻材料的电阻变化
-
灵敏度:较高,但温度敏感性大
-
应用场景:高g值测量、冲击检测
热对流加速度计
-
工作原理:通过气体热对流变化检测加速度
-
特点:无固体质量块,抗冲击性强
-
缺点:响应速度较慢
1.3 关键性能参数体系
| 参数 | 定义 | 消费级 | 工业级 | 单位 |
|---|---|---|---|---|
| 量程 | 可测量加速度范围 | ±2-±16 | ±2-±200 | g |
| 带宽 | 频率响应范围 | 100-500 | 0.5-5000 | Hz |
| 噪声密度 | 本底噪声水平 | 100-300 | 10-50 | μg/√Hz |
| 零偏稳定性 | 零点漂移 | 1-10 | 0.1-1 | mg |
| 非线性度 | 输入输出偏差 | 0.5-2 | 0.1-0.5 | %FS |
二、智能手机中的创新应用
2.1 用户界面交互革命
屏幕自动旋转:
// 屏幕方向检测算法
typedef struct {
float accel_x, accel_y, accel_z;
float gravity_threshold;
} OrientationDetector;
ScreenOrientation detect_orientation(OrientationDetector *detector) {
float g_x = detector->accel_x;
float g_y = detector->accel_y;
// 基于重力分量判断设备方向
if (fabs(g_x) > fabs(g_y)) {
if (g_x > detector->gravity_threshold)
return LANDSCAPE_LEFT;
else
return LANDSCAPE_RIGHT;
} else {
if (g_y > detector->gravity_threshold)
return PORTRAIT_UPRIGHT;
else
return PORTRAIT_UPSIDE_DOWN;
}
}手势识别:
现代智能手机通过MEMS加速度计实现丰富的手势控制:
-
抬起唤醒:检测特定加速度模式识别拿起动作
-
翻面静音:通过旋转检测实现来电静音
-
敲击操作:双击唤醒、手势快捷操作
2.2 健康与运动追踪
步数计数算法:
class PedometerAlgorithm:
def __init__(self):
self.step_count = 0
self.last_peak = 0
self.accel_magnitude = 0
self.peak_threshold = 0.2 # g值阈值
def update_step_count(self, accel_data):
# 计算加速度矢量幅值
current_magnitude = np.sqrt(
accel_data['x']**2 +
accel_data['y']**2 +
accel_data['z']**2
)
# 去除重力分量
accel_magnitude = current_magnitude - 1.0 # 减去1g重力
# 峰值检测算法
if self.is_peak(accel_magnitude):
self.step_count += 1
self.last_peak = accel_magnitude
return self.step_count
def is_peak(self, magnitude):
# 基于阈值和时序的峰值检测
if (magnitude > self.peak_threshold and
magnitude > self.last_peak * 1.1):
return True
return False运动类型识别:
通过机器学习算法分析加速度计数据模式:
-
步行:规律的正弦波形,频率1-2 Hz
-
跑步:更高频率和幅度的冲击信号
-
上下楼梯:独特的垂直加速度模式
-
交通工具:低频振动特征
2.3 游戏与虚拟现实
运动控制:
class MotionController:
def __init__(self):
self.calibration_offset = {'x':0, 'y':0, 'z':0}
self.sensitivity = 1.0
def get_tilt_angles(self, raw_accel):
# 校准数据
calibrated = self.calibrate_data(raw_accel)
# 计算倾斜角度
tilt_x = np.arctan2(
calibrated['x'],
np.sqrt(calibrated['y']**2 + calibrated['z']**2)
) * 180 / np.pi
tilt_y = np.arctan2(
calibrated['y'],
np.sqrt(calibrated['x']**2 + calibrated['z']**2)
) * 180 / np.pi
return {'pitch': tilt_x, 'roll': tilt_y}
def calibrate_data(self, raw_data):
return {
'x': (raw_data['x'] - self.calibration_offset['x']) * self.sensitivity,
'y': (raw_data['y'] - self.calibration_offset['y']) * self.sensitivity,
'z': (raw_data['z'] - self.calibration_offset['z']) * self.sensitivity
}三、结构健康监测中的关键技术
3.1 桥梁健康监测系统
振动特性分析:
大型基础设施的振动监测需要特殊的传感器配置:
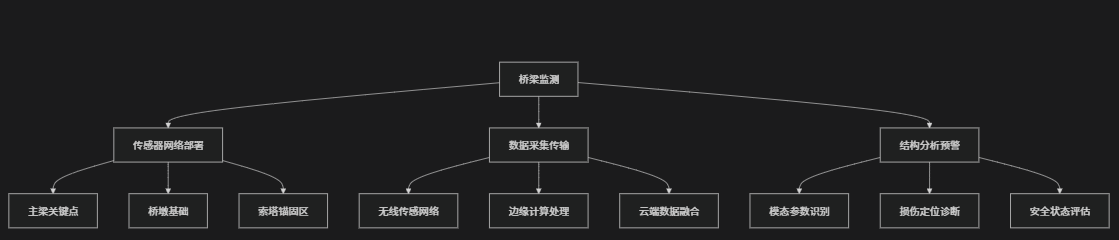
监测参数要求:
-
量程:±2g(满足桥梁正常振动范围)
-
带宽:0.1-50Hz(覆盖结构主要振动频率)
-
分辨率:<100μg(检测微小结构变化)
-
长期稳定性:<1mg/年(保证数据可靠性)
3.2 建筑结构监测
高层建筑监测:
// 建筑振动监测算法
typedef struct {
float acceleration[3]; // 三轴加速度
float displacement[3]; // 计算位移
float natural_frequency; // 结构固有频率
float damping_ratio; // 阻尼比
} StructuralMonitoring;
void analyze_structural_health(StructuralMonitoring *monitor) {
// 频域分析获取模态参数
FrequencyDomainData freq_data = fft_analysis(monitor->acceleration);
// 识别结构固有频率
monitor->natural_frequency = identify_peak_frequency(freq_data);
// 计算结构位移(二次积分)
monitor->displacement = double_integrate(monitor->acceleration);
// 阻尼比估计
monitor->damping_ratio = estimate_damping(freq_data);
// 安全状态评估
SafetyStatus status = evaluate_safety_level(monitor);
}地震监测应用:
MEMS加速度计在地震预警系统中发挥关键作用:
-
触发阈值:0.01g-0.1g(根据应用场景调整)
-
响应时间:<1秒(快速预警要求)
-
网络密度:每平方公里2-5个监测点
-
预警能力:提供数秒到数十秒的预警时间
3.3 工业设备预测性维护
旋转机械监测:
class PredictiveMaintenance:
def __init__(self):
self.vibration_thresholds = {
'normal': 0.1, # g
'warning': 0.5, # g
'critical': 1.0 # g
}
self.frequency_bands = {
'unbalance': '1x_rpm',
'misalignment': '2x_rpm',
'bearing_fault': 'high_frequency'
}
def analyze_machine_health(self, vibration_data, rpm):
# 时域分析
rms_vibration = np.sqrt(np.mean(vibration_data**2))
# 频域分析
freq_spectrum = np.fft.fft(vibration_data)
# 故障特征提取
fault_features = self.extract_fault_features(freq_spectrum, rpm)
# 健康状态评估
health_status = self.assess_health_status(rms_vibration, fault_features)
return health_status
def extract_fault_features(self, spectrum, rpm):
features = {}
# 不平衡故障(1倍转频)
features['unbalance'] = spectrum[get_frequency_index(rpm)]
# 不对中故障(2倍转频)
features['misalignment'] = spectrum[get_frequency_index(2*rpm)]
# 轴承故障(高频成分)
features['bearing_fault'] = np.max(spectrum[high_freq_band])
return features四、技术挑战与创新解决方案
4.1 精度提升技术
噪声抑制策略:
class NoiseReduction:
def __init__(self):
self.filter_type = 'adaptive_kalman'
self.process_noise = 1e-5
self.measurement_noise = 1e-3
def kalman_filter(self, raw_accel):
# 卡尔曼滤波状态变量
x = np.array([0, 0, 0]) # 位置、速度、加速度
P = np.eye(3) * 0.1 # 误差协方差矩阵
filtered_data = []
for measurement in raw_accel:
# 预测步骤
x = self.state_transition @ x
P = self.state_transition @ P @ self.state_transition.T + self.process_noise
# 更新步骤
y = measurement - self.measurement_matrix @ x
S = self.measurement_matrix @ P @ self.measurement_matrix.T + self.measurement_noise
K = P @ self.measurement_matrix.T @ np.linalg.inv(S)
x = x + K @ y
P = (np.eye(3) - K @ self.measurement_matrix) @ P
filtered_data.append(x[2]) # 加速度估计值
return filtered_data温度补偿技术:
MEMS加速度计对温度变化敏感,需要精密补偿:
-
多项式补偿:三阶多项式拟合温度特性
-
分段线性:在不同温区采用不同补偿系数
-
自适应学习:在线更新补偿参数
4.2 功耗优化设计
智能电源管理:
// 低功耗运行模式管理
typedef enum {
POWER_MODE_HIGH_PERF, // 高性能模式
POWER_MODE_NORMAL, // 正常模式
POWER_MODE_LOW_POWER, // 低功耗模式
POWER_MODE_SUSPEND // 挂起模式
} PowerMode;
void manage_power_consumption(Accelerometer *accel, ApplicationScenario scenario) {
switch(scenario) {
case CONTINUOUS_MONITORING:
set_power_mode(accel, POWER_MODE_LOW_POWER);
set_data_rate(accel, 10); // 10Hz数据率
break;
case MOTION_DETECTION:
set_power_mode(accel, POWER_MODE_NORMAL);
enable_wake_on_motion(accel, 0.1); // 0.1g唤醒阈值
break;
case HIGH_SPEED_CAPTURE:
set_power_mode(accel, POWER_MODE_HIGH_PERF);
set_data_rate(accel, 1000); // 1kHz数据率
break;
}
}功耗对比分析:
| 工作模式 | 数据率 | 典型功耗 | 应用场景 |
|---|---|---|---|
| 高性能模式 | 1-5 kHz | 500-1000 μA | 振动分析、冲击检测 |
| 正常模式 | 100-500 Hz | 100-200 μA | 运动追踪、手势识别 |
| 低功耗模式 | 10-50 Hz | 20-50 μA | 持续活动监测 |
| 唤醒模式 | 1-5 Hz | 5-10 μA | 待机检测、事件触发 |
4.3 可靠性增强技术
冲击保护设计:
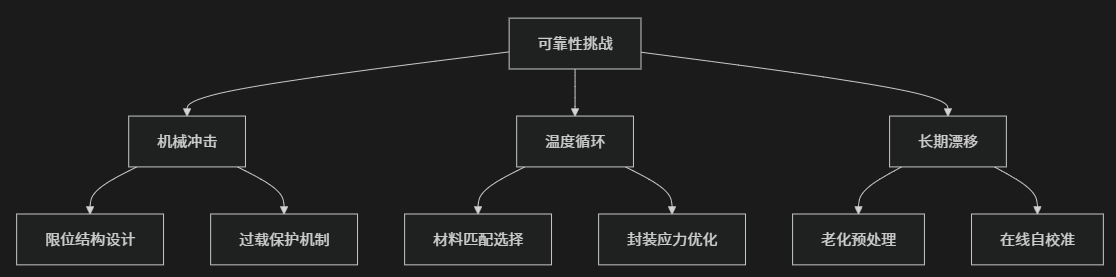
加速寿命测试:
工业级MEMS加速度计需要经过严格的可靠性验证:
-
机械冲击:5000g,0.5ms半正弦波
-
温度循环:-40°C至125°C,1000次循环
-
振动疲劳:20g RMS,每轴24小时
-
高温高湿:85°C/85%RH,1000小时
五、前沿发展趋势
5.1 多传感器融合
IMU集成方案:
现代应用趋向于集成3轴加速度计、3轴陀螺仪和3轴磁力计:
class SensorFusion:
def __init__(self):
self.accelerometer = MEMSAccelerometer()
self.gyroscope = MEMSGyroscope()
self.magnetometer = MEMSMagnetometer()
self.fusion_algorithm = MadgwickFilter()
def get_orientation(self):
# 采集各传感器数据
accel_data = self.accelerometer.read()
gyro_data = self.gyroscope.read()
mag_data = self.magnetometer.read()
# 传感器融合算法
orientation = self.fusion_algorithm.update(
accel_data, gyro_data, mag_data)
return orientation
def compensate_errors(self):
# 加速度计辅助陀螺零偏估计
# 磁力计辅助航向角校准
# 温度交叉补偿
pass5.2 AI增强型传感器
边缘智能处理:
class AIEnhancedAccelerometer:
def __init__(self):
self.neural_network = EdgeAIProcessor()
self.feature_extractor = FeatureExtractor()
def intelligent_sensing(self, raw_data):
# 特征提取
features = self.feature_extractor.extract(raw_data)
# AI推理
activity_type = self.neural_network.predict(features)
# 自适应参数调整
self.adapt_parameters_based_on_activity(activity_type)
return {
'processed_data': self.process_with_optimal_params(raw_data),
'activity_type': activity_type,
'confidence': self.neural_network.confidence
}5.3 新兴应用领域
医疗健康监测:
-
帕金森病监测:震颤频率和幅度量化
-
跌倒检测:老年人安全监护
-
睡眠质量分析:体动和呼吸监测
农业与环境:
-
精准农业:农机振动优化
-
地质灾害预警:山体滑坡监测
-
气象监测:风力、地震监测网络
六、选型指南与设计考量
6.1 应用导向选型矩阵
| 应用场景 | 推荐量程 | 带宽要求 | 噪声要求 | 功耗预算 |
|---|---|---|---|---|
| 智能手机 | ±8g | 400Hz | <200μg/√Hz | <100μA |
| 可穿戴设备 | ±4g | 200Hz | <300μg/√Hz | <50μA |
| 工业振动 | ±16g | 2kHz | <50μg/√Hz | <1mA |
| 结构监测 | ±2g | 50Hz | <25μg/√Hz | <500μA |
| 汽车电子 | ±50g | 1kHz | <100μg/√Hz | <2mA |
6.2 系统设计要点
信号链设计:
// 典型信号链配置
typedef struct {
SensorConfig sensor;
AnalogFrontEnd afe;
DigitalFilter digital_filter;
DataInterface interface;
} SignalChainDesign;
void optimize_signal_chain(SignalChainDesign *design, ApplicationReq req) {
// 传感器配置
design->sensor.range = select_optimal_range(req.max_acceleration);
design->sensor.data_rate = req.bandwidth * 10; // 过采样
// 模拟前端
design->afe.gain = calculate_optimal_gain(design->sensor.sensitivity);
design->afe.filter_cutoff = req.bandwidth;
// 数字滤波
design->digital_filter.type = SELECT_BASED_ON_APPLICATION(req);
design->digital_filter.cutoff = req.bandwidth;
// 接口选择
design->interface.type = (req.data_rate > 1000) ? SPI : I2C;
}结语:感知边界的持续拓展
MEMS加速度计从消费电子到工业应用的演进,体现了微机电技术从普及到精深的发展路径。在智能手机中,它为我们提供了直观的运动交互;在结构健康监测中,它守护着重大基础设施的安全。这种跨越数量级的技术适应性,正是MEMS加速度计独特价值的体现。
随着新材料、新工艺、新算法的不断涌现,MEMS加速度计正在向更高精度、更低功耗、更强智能的方向发展。未来,我们有理由期待在量子极限传感、自供电系统、生物集成接口等前沿领域看到更多突破。
从微观机械结构到宏观物理世界,MEMS加速度计用精密的振动感知,连接着数字智能与物理现实,持续拓展着人类感知的边界。 这场技术演进不仅推动了产品创新,更深刻改变了我们理解和交互世界的方式。