目录
[4.1 模拟驾驶员模块](#4.1 模拟驾驶员模块)
[4.2 HCU能量管理模块](#4.2 HCU能量管理模块)
[4.3 整车物理模型](#4.3 整车物理模型)
1.课题概述
混动汽车模型以"驾驶员需求-能量分配-整车执行-闭环反馈"为核心逻辑,整合驾驶员模型、HCU能量管理、整车物理模型三大模块,最终实现WLTP目标车速跟踪与能耗(油耗+电耗)优化。核心目标包括通过3种基础模式(启动、纯电驱动、混合驱动)及充电模式切换,使实际车速匹配WLTP工况。
2.系统仿真结果
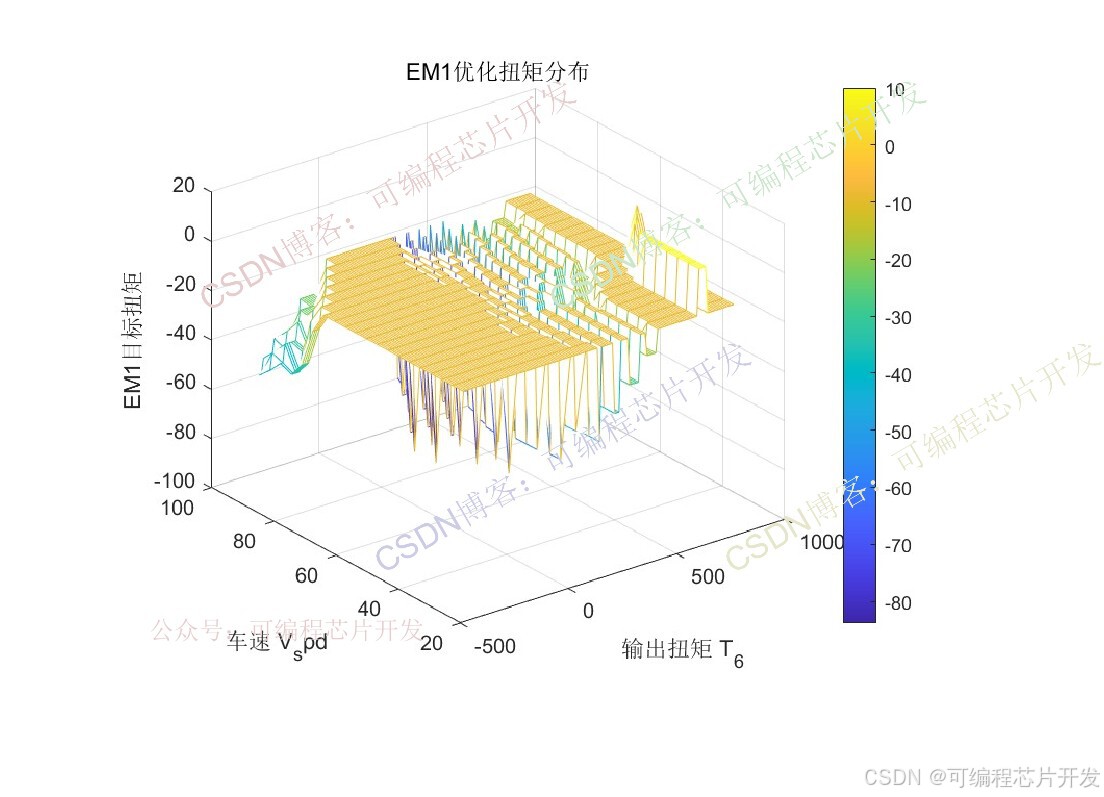
车辆扭矩分布图:
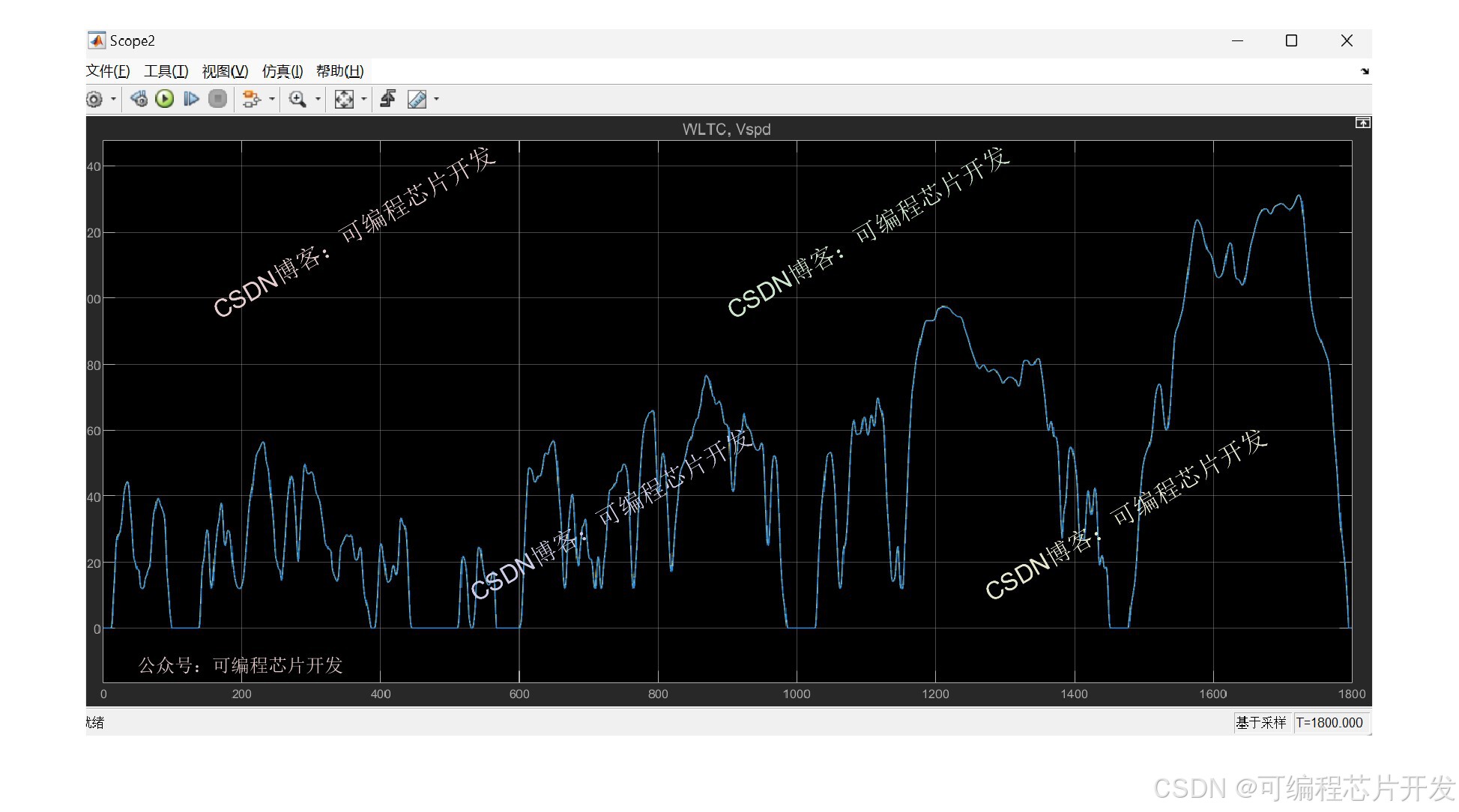
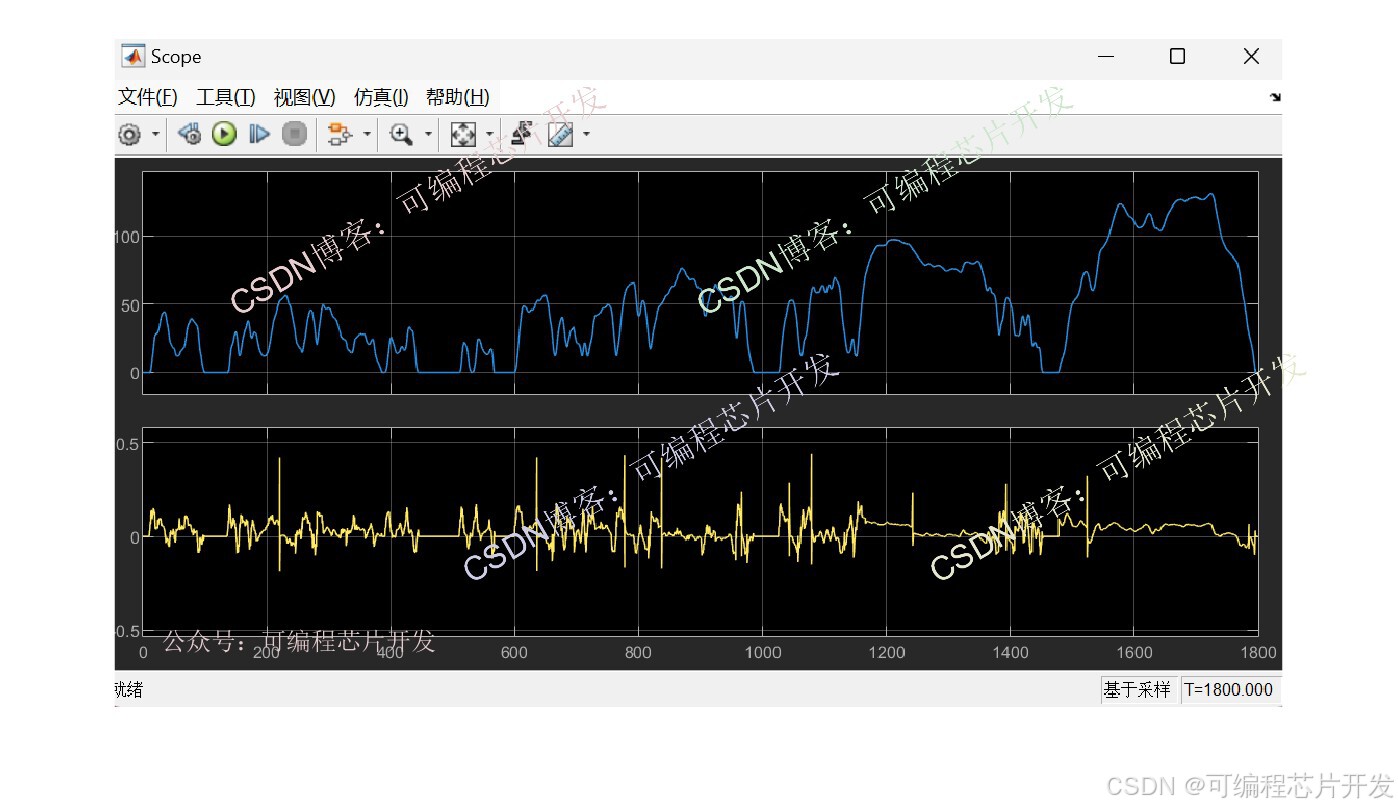
系统的参考输入与车辆速度反馈曲线对比(两者基本重合):
系统的参考输入与车辆速度反馈曲线的误差曲线:
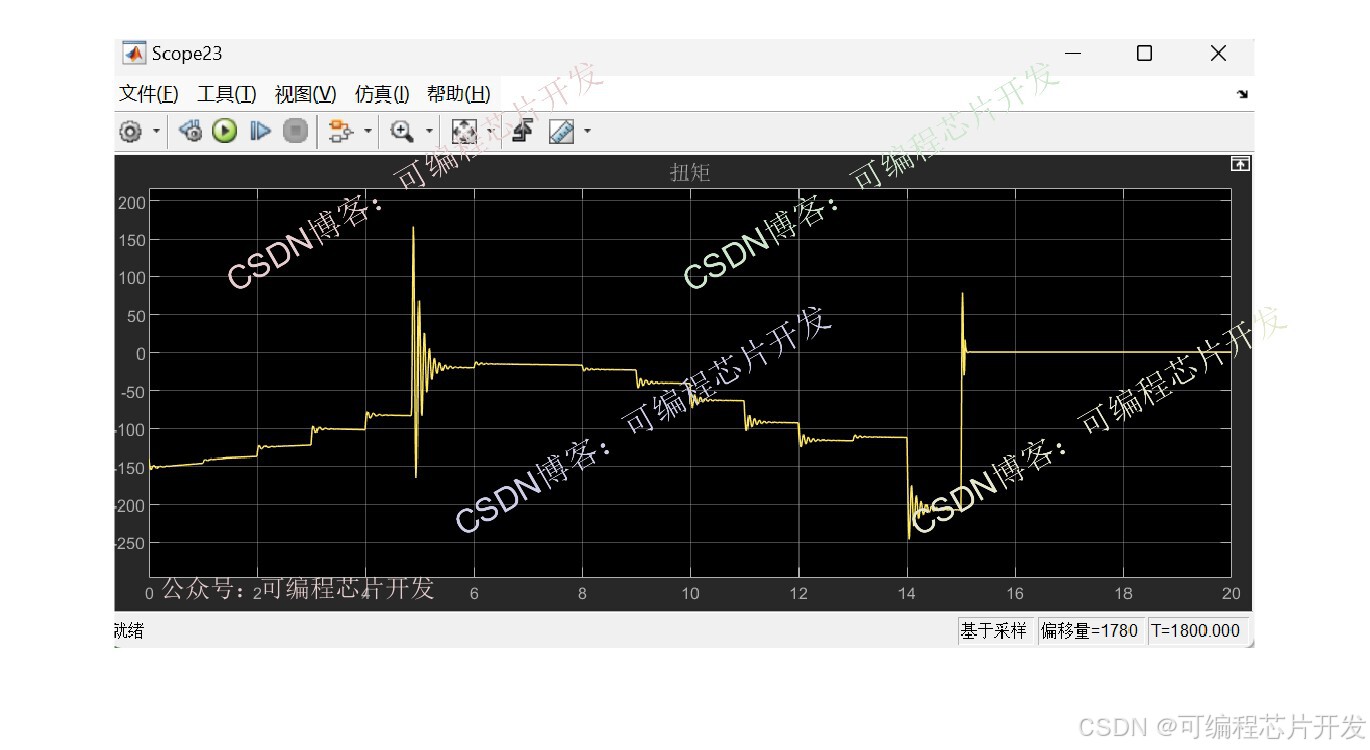
驾驶模块的扭矩输出曲线:
3.核心程序与模型
版本:Matlab2024b
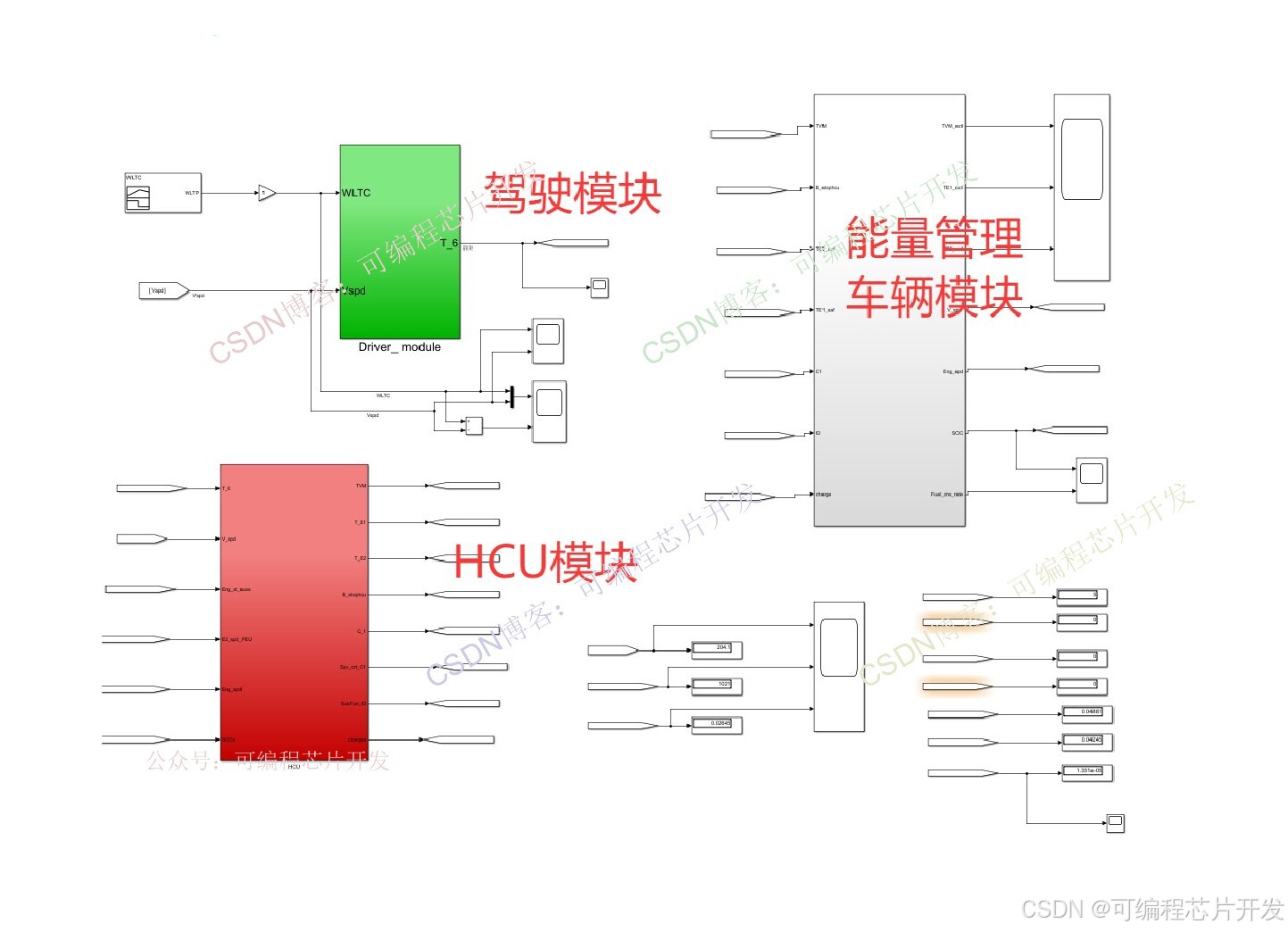
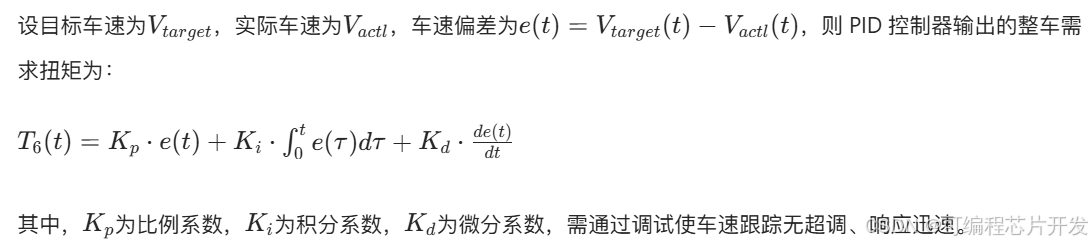
1.模拟驾驶员根据目标车速与实际车速的偏差,通过 PID 控制器计算整车所需驱动扭矩,为后续能量分配提供输入。
2.HCU模块作为整车 "大脑",根据整车需求扭矩(T_6)、发动机状态、电池状态等信号,划分驾驶模式(EV/HEV),并分配发动机与双电机的目标扭矩,同时控制离合器通断。
3.能量管理模块和车辆模块整合 EMS(发动机管理)、PEU(电机控制)、BAT(电池管理)三大执行单元,构建整车动力学模型,将 HCU 输出的目标扭矩转化为实际车速、转速等反馈信号。
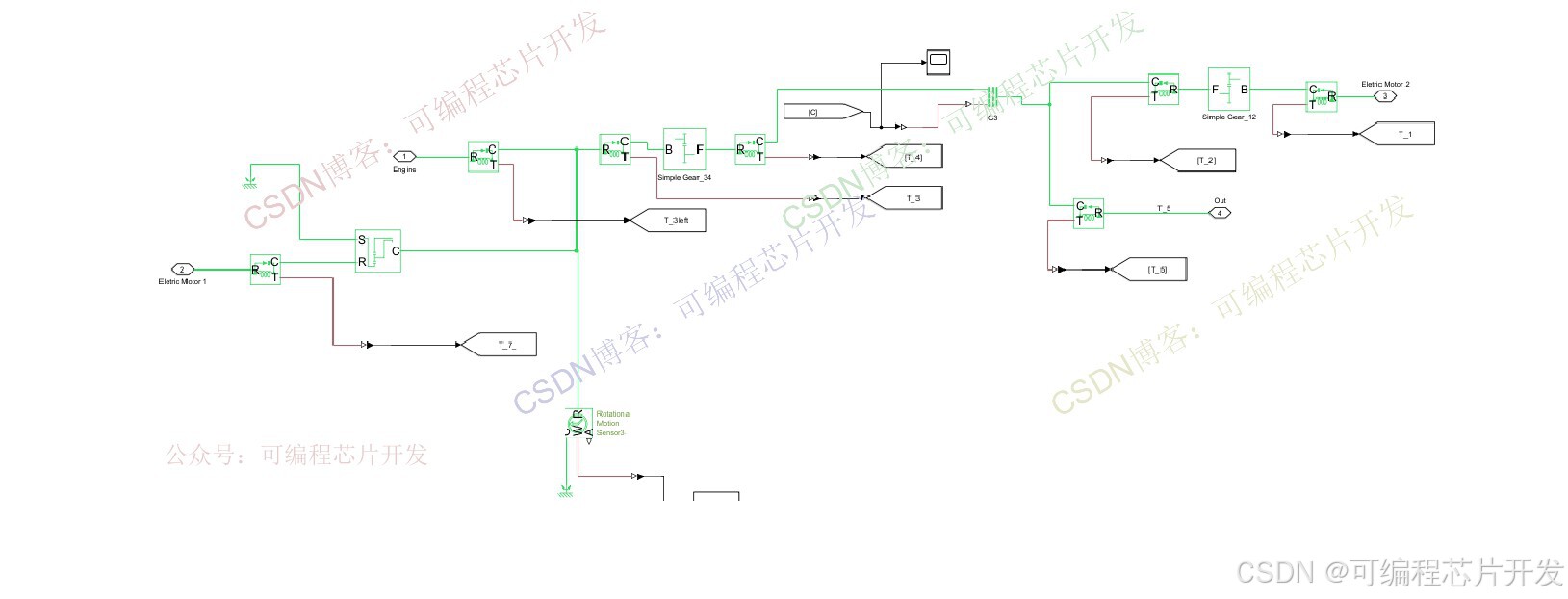
车辆物理建模:
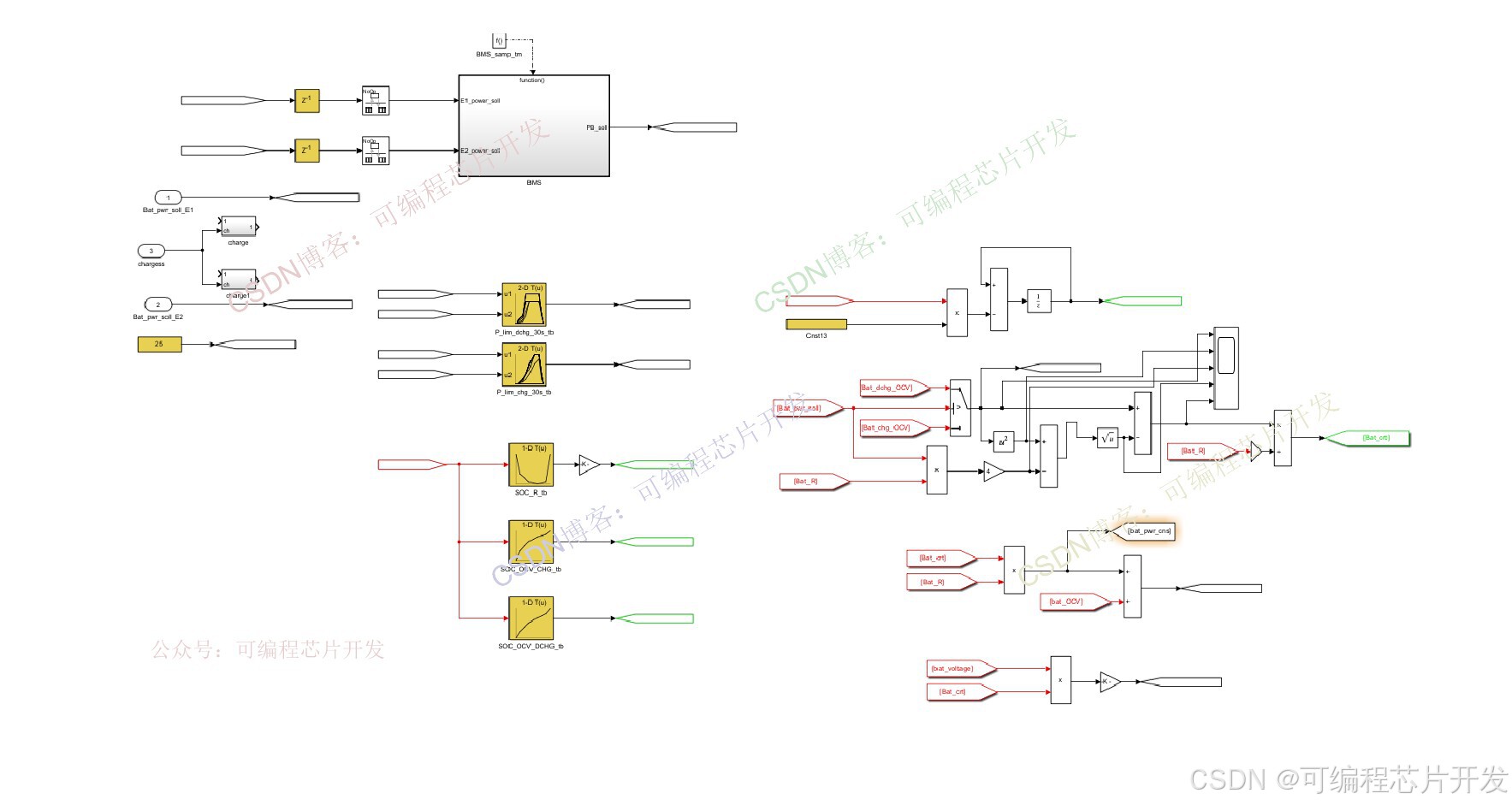
电池管理模块:
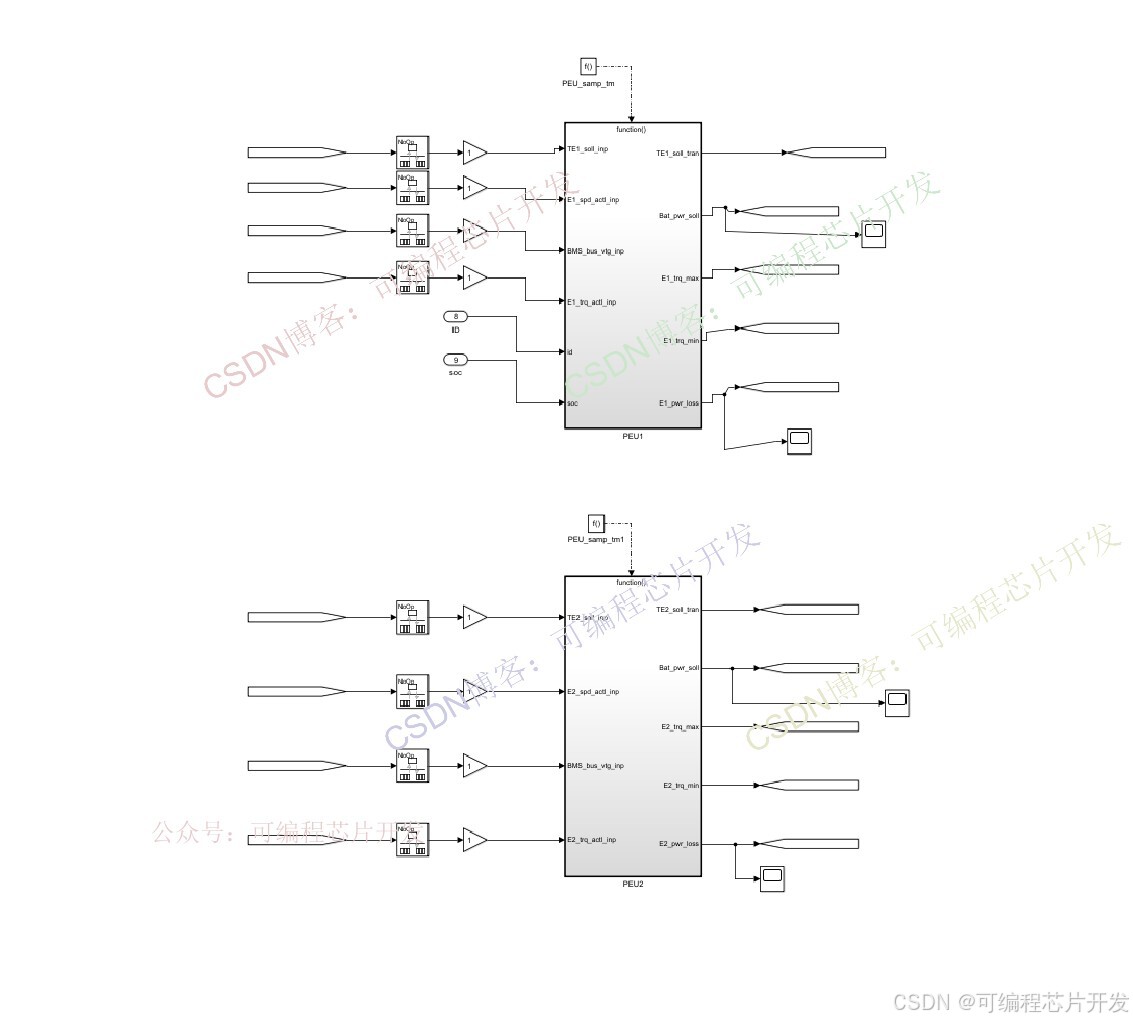
PEU模块:
能量管理模块:
26_009ma
4.系统原理简介
4.1 模拟驾驶员模块
模拟驾驶员根据目标车速与实际车速的偏差,通过 PID 控制器计算整车所需驱动扭矩,为后续能量分配提供输入。
输入量
目标车速:来自WLTP工况信号(Signalbilder),反映不同行驶场景下的车速需求。
实际车速(Vspd):来自整车物理模型的反馈,体现当前车辆实际行驶速度。
输出量
整车驱动需求扭矩,即推动车辆前进所需的总扭矩,传递至HCU模块用于能量分配。
其中PID控制器的功能如下:
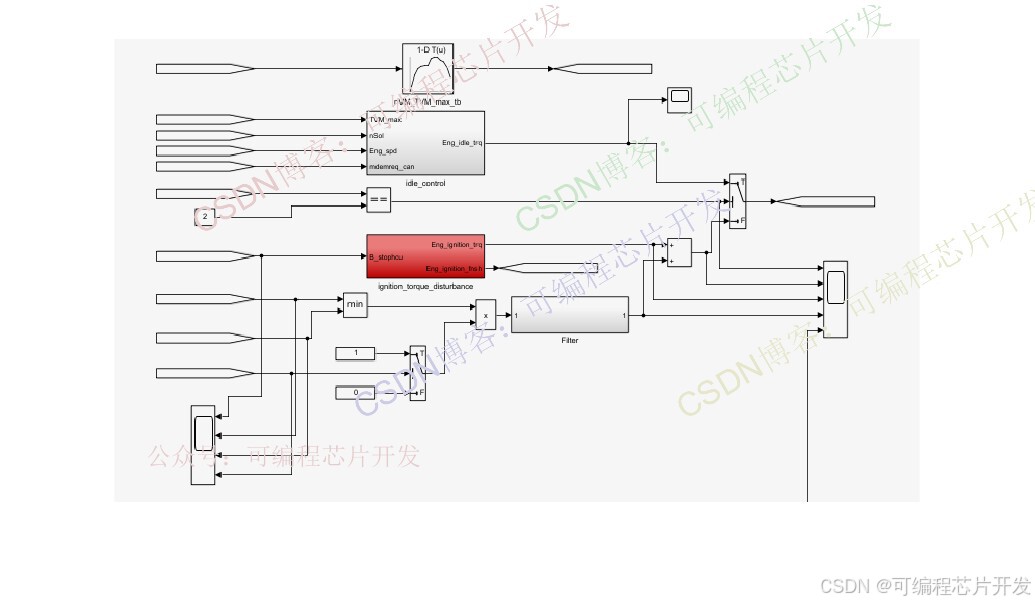
4.2 HCU能量管理模块
作为整车 "大脑",根据整车需求扭矩、发动机状态、电池状态等信号,划分驾驶模式(EV/HEV),并分配发动机与双电机的目标扭矩,同时控制离合器通断。
| 输入量 | 来源 | 作用 |
|---|---|---|
| T_6 | 驾驶员模型 | 整车驱动总需求扭矩 |
| Eng_stt | EMS 模块 | 发动机当前扭矩信号,判断发动机是否输出动力 |
| Vspd | 整车物理模型 | 实际车速,辅助模式切换(如高速优先 HEV) |
| Eng_st_suss | EMS 模块 | 发动机启动标志(1 = 启动中,0 = 未启动),区分 EV/HEV |
| E2_spd_PEU | MOTOR2 模块 | 电机 2 转速,用于电机扭矩计算(结合效率 MAP) |
| Eng_spd | ENGINE 模块 | 发动机转速,判断是否满足启动 / 停机条件(如 < 300rpm 停机) |
| Bat_pack_vtg | BAT 模块 | 电池电压,反映电池状态,辅助扭矩分配(如低电压限制放电) |
| 输出量 | 去向 | 作用 |
|---|---|---|
| TVM | EMS 模块 | 发动机目标扭矩,控制发动机输出 |
| TE1_saf | PEU 模块 | 电机 1 目标扭矩,控制电机 1 驱动 / 发电 |
| TE2_saf | PEU 模块 | 电机 2 目标扭矩,控制电机 2 驱动 / 发电 |
| B_stophcu | EMS 模块 | 发动机停机信号(1→0 阶跃,需 Eng_spd≥300rpm) |
| C1 | 整车物理模型 | 离合器状态(1 = 闭合,0 = 断开),HEV 模式闭合传递发动机动力 |
EV模式(SubFun_ID=1):电池电量充足(SOC≥20%)、低扭矩需求(T_6≤50N.m)时激活,仅电机2 驱动(电机1备用或充电),离合器C1断开。
HEV模式(SubFun_ID=2):高扭矩需求(T_6>50N・m)、电池电量低(SOC<20%)或高速(Vspd>80km/h)时激活,发动机 + 双电机协同驱动,离合器C1闭合。
启动模式:车辆静止(Vspd=0)时,电机 2 提供启动扭矩(T_EM2=20-30N.m),发动机暂不启动。
充电模式:车辆滑行(T_6<0)或刹车时,电机1/2切换为发电模式,向电池充电,离合器C1断开。
4.3 整车物理模型
EMS模块(发动机管理):接收HCU的TVM信号,控制发动机实际输出扭矩,同时反馈发动机转速(Eng_spd)与启动状态(Eng_st_suss)。
PEU模块(电机控制):接收TE1_saf、TE2_saf信号,控制电机1/2输出实际扭矩,反馈电机转速(E2_spd_PEU)。
BAT模块(电池管理):监控电池SOC、电压、温度,限制充放电功率,反馈Bat_pack_vtg与 SOC状态。
5.完整工程文件
v
v
关注后,回复关键词: a5