问题介绍
FrozenLake 指 OpenAI Gym 库中的一个经典强化学习环境。
- 游戏场景:玩家控制角色在一个由冰冻湖面组成的网格世界中移动,目标是从起点到达终点,同时避免掉入冰面上的洞穴。网格通常为正方形,如 4x4 或 8x8 的地图,每个方格可以是起点、终点、冰冻区域或洞穴。
- 动作空间:动作的形状是(1,)的 int64 变量,在范围 {0,3} 内,表示玩家应该向哪个方向移动。其中 0 为向左移动,1 为向下移动,2 为向右移动,3 为向上移动。
- 观察空间:观察值是一个 int 值,代表玩家的当前位置,计算方式为 current_row * nrows + current_col(其中行和列都从 0 开始)。例如,在 4x4 地图中的目标位置可以这样计算:3 * 4 + 3 = 15。
- 初始状态:游戏开始时,玩家处于状态 0,即地图的左上角位置 0,0。
- 奖励机制:达到目标获得奖励 + 1,掉入洞中或到达冰冻区域奖励为 0。
- 游戏结束条件:玩家掉入洞中或到达目标位置时,游戏终止;若使用时间限制包装器,对于 4x4 环境,情节长度为 100 步,对于 8x8 环境,情节长度为 200 步,达到步数限制时游戏结束。
使用MDP解决问题
初始化环境
python
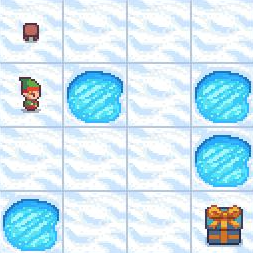
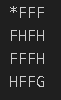
from mdp import FrozenLakeEnv
mdp = FrozenLakeEnv(slip_chance=0)
mdp.render()如下图所示,F表示正常的道路,H表示洞,G表示终点。
定义价值迭代函数
python
def value_iteration(mdp, state_values=None, gamma=0.9, num_iter=1000, min_difference=1e-5):
""" performs num_iter value iteration steps starting from state_values. Same as before but in a function """
state_values = state_values or {s: 0 for s in mdp.get_all_states()}
for i in range(num_iter):
# 计算新的状态价值:对每个状态,取所有动作的最大期望回报
new_state_values = {}
for s in mdp.get_all_states():
# 终端状态(无可用动作)的价值保持为0
if mdp.is_terminal(s):
new_state_values[s] = 0.0
continue
# 遍历所有可能的动作,计算每个动作的期望回报
action_values = []
for a in mdp.get_possible_actions(s):
q_val = 0.0
# 遍历该动作下的所有转移概率和后续状态
for prob, next_s, reward in mdp.get_transitions(s, a):
q_val += prob * (reward + gamma * state_values[next_s])
action_values.append(q_val)
# 取最大的动作价值作为当前状态的新价值
new_state_values[s] = max(action_values)
assert isinstance(new_state_values, dict)
# 计算与上一轮价值的最大差异
diff = max(abs(new_state_values[s] - state_values[s])
for s in mdp.get_all_states())
print("iter %4i | diff: %6.5f | V(start): %.3f " %
(i, diff, new_state_values[mdp._initial_state]))
state_values = new_state_values
if diff < min_difference:
break
return state_values进行价值迭代
python
state_values = value_iteration(mdp)下面展示运行过程
根据当前状态和动作计算累计奖励
python
def get_action_value(mdp, state_values, state, action, gamma):
""" Computes Q(s,a) as in formula above """
q_value = 0.0
# 获取从state执行action后所有可能的下一状态
next_states = mdp.get_next_states(state, action)
for next_state in next_states:
# 获取转移概率 P(s'|s,a)
prob = mdp.get_transition_prob(state, action, next_state)
# 获取即时奖励 r(s,a,s')
reward = mdp.get_reward(state, action, next_state)
# 累加计算 Q(s,a) = sum[ P(s'|s,a) * (r + gamma*V(s')) ]
q_value += prob * (reward + gamma * state_values[next_state])
return q_value根据当前状态选择最优动作
python
def get_optimal_action(mdp, state_values, state, gamma=0.9):
""" Finds optimal action using formula above. """
if mdp.is_terminal(state):
return None
# 获取当前状态下所有可能的动作
possible_actions = mdp.get_possible_actions(state)
# 计算每个动作的Q值,存储为 {动作: Q值}
action_q = {}
for action in possible_actions:
q_value = get_action_value(mdp, state_values, state, action, gamma)
action_q[action] = q_value
# 选择Q值最大的动作(argmax_a Q(s,a))
optimal_action = max(action_q, key=action_q.get)
return optimal_action下面展示通过价值迭代函数所得到的状态价值,进行游戏的过程
python
s = mdp.reset()
mdp.render()
for t in range(100):
a = get_optimal_action(mdp, state_values, s, gamma=0.9)
print(a, end='\n\n')
s, r, done, _ = mdp.step(a)
mdp.render()
if done:
break角色依据状态价值进行运动的过程如下所示

下面进行可视化,定义函数
python
import matplotlib.pyplot as plt
%matplotlib inline
def draw_policy(mdp, state_values):
plt.figure(figsize=(3, 3))
h, w = mdp.desc.shape
states = sorted(mdp.get_all_states())
V = np.array([state_values[s] for s in states])
Pi = {s: get_optimal_action(mdp, state_values, s, gamma) for s in states}
plt.imshow(V.reshape(w, h), cmap='gray', interpolation='none', clim=(0, 1))
ax = plt.gca()
ax.set_xticks(np.arange(h)-.5)
ax.set_yticks(np.arange(w)-.5)
ax.set_xticklabels([])
ax.set_yticklabels([])
Y, X = np.mgrid[0:4, 0:4]
a2uv = {'left': (-1, 0), 'down': (0, -1), 'right': (1, 0), 'up': (0, 1)}
for y in range(h):
for x in range(w):
plt.text(x, y, str(mdp.desc[y, x].item()),
color='g', size=12, verticalalignment='center',
horizontalalignment='center', fontweight='bold')
a = Pi[y, x]
if a is None:
continue
u, v = a2uv[a]
plt.arrow(x, y, u*.3, -v*.3, color='m',
head_width=0.1, head_length=0.1)
plt.grid(color='b', lw=2, ls='-')
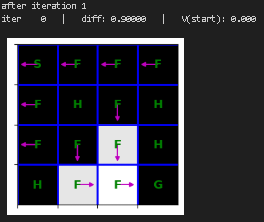
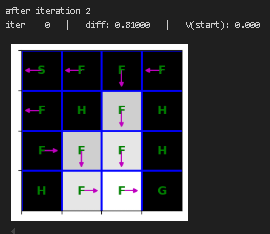
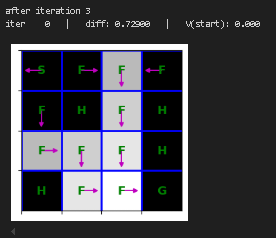
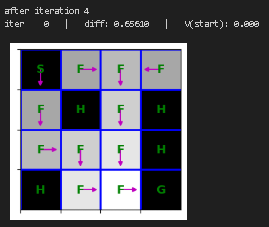
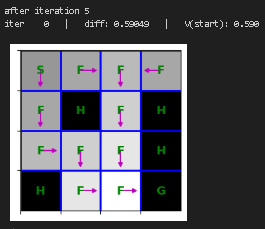
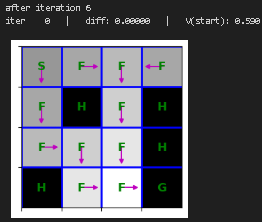
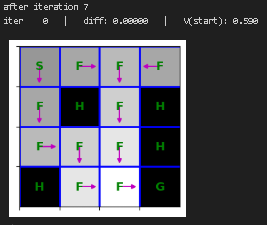
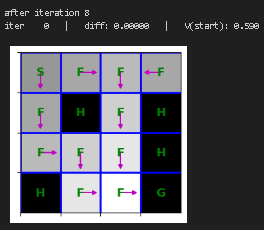
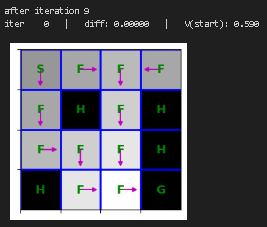
plt.show()重新训练价值迭代函数并进行可视化
python
state_values = {s: 0 for s in mdp.get_all_states()}
for i in range(10):
print("after iteration %i" % i)
state_values = value_iteration(mdp, state_values, num_iter=1)
draw_policy(mdp, state_values)
# please ignore iter 0 at each step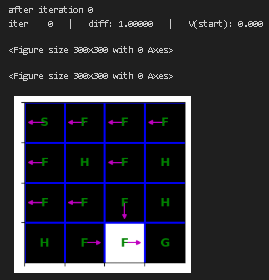 |
 |
 |
 |
 |
|---|---|---|---|---|
 |
 |
 |
 |
 |
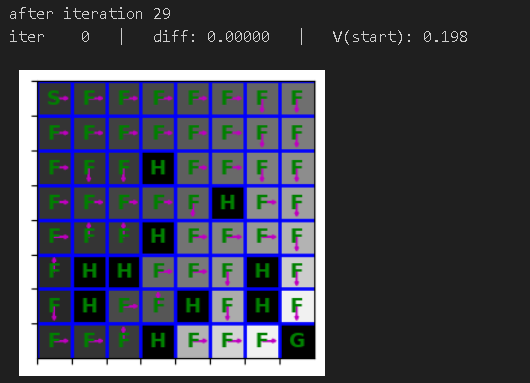
| 定义8*8的问题,并进行可视化 |
python
from IPython.display import clear_output
from time import sleep
mdp = FrozenLakeEnv(map_name='8x8', slip_chance=0.1)
state_values = {s: 0 for s in mdp.get_all_states()}
for i in range(30):
clear_output(True)
print("after iteration %i" % i)
state_values = value_iteration(mdp, state_values, num_iter=1)
draw_policy(mdp, state_values)
sleep(0.5)
# please ignore iter 0 at each step整体迭代过程如下所示
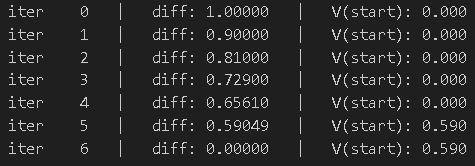
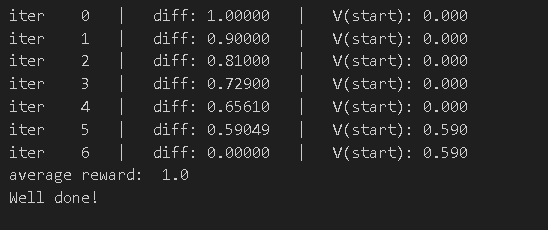
大规模测试
连续跑1000次进行测试
python
mdp = FrozenLakeEnv(slip_chance=0)
state_values = value_iteration(mdp)
total_rewards = []
for game_i in range(1000):
s = mdp.reset()
rewards = []
for t in range(100):
s, r, done, _ = mdp.step(
get_optimal_action(mdp, state_values, s, gamma=0.9))
rewards.append(r)
if done:
break
total_rewards.append(np.sum(rewards))
print("average reward: ", np.mean(total_rewards))
assert(1.0 <= np.mean(total_rewards) <= 1.0)
print("Well done!")迭代过程如下
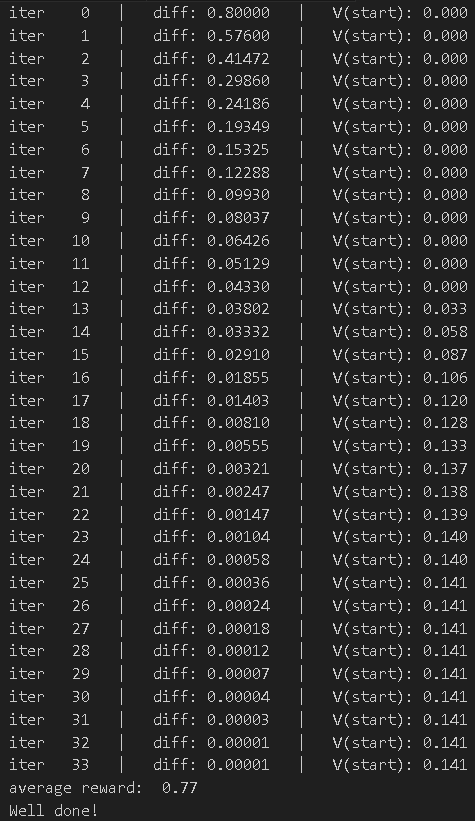
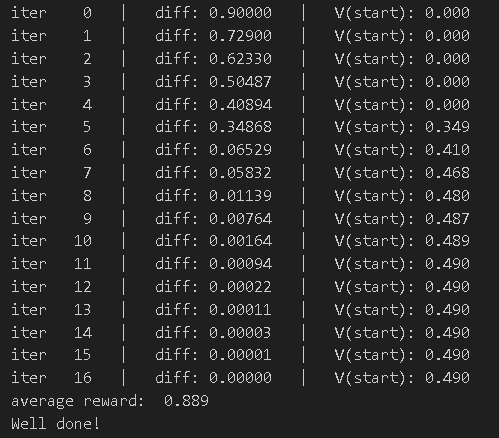
调整slip_chance重新进行测试,打滑概率为10%
python
# Measure agent's average reward
mdp = FrozenLakeEnv(slip_chance=0.1)
state_values = value_iteration(mdp)
total_rewards = []
for game_i in range(1000):
s = mdp.reset()
rewards = []
for t in range(100):
s, r, done, _ = mdp.step(
get_optimal_action(mdp, state_values, s, gamma=0.9))
rewards.append(r)
if done:
break
total_rewards.append(np.sum(rewards))
print("average reward: ", np.mean(total_rewards))
assert(0.8 <= np.mean(total_rewards) <= 0.95)
print("Well done!")迭代过程如下
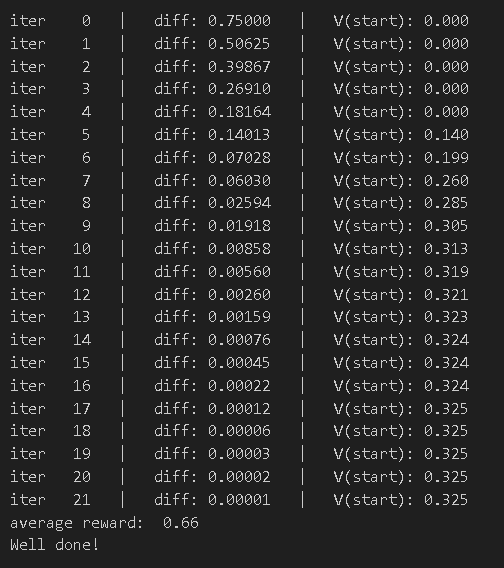
继续调整slip_chance重新进行测试,打滑概率为25%
python
# Measure agent's average reward
mdp = FrozenLakeEnv(slip_chance=0.25)
state_values = value_iteration(mdp)
total_rewards = []
for game_i in range(1000):
s = mdp.reset()
rewards = []
for t in range(100):
s, r, done, _ = mdp.step(
get_optimal_action(mdp, state_values, s, gamma=0.9))
rewards.append(r)
if done:
break
total_rewards.append(np.sum(rewards))
print("average reward: ", np.mean(total_rewards))
assert(0.6 <= np.mean(total_rewards) <= 0.7)
print("Well done!")迭代过程如下
改为8*8的问题规模,定义打滑概率为20%
python
# Measure agent's average reward
mdp = FrozenLakeEnv(slip_chance=0.2, map_name='8x8')
state_values = value_iteration(mdp)
total_rewards = []
for game_i in range(1000):
s = mdp.reset()
rewards = []
for t in range(100):
s, r, done, _ = mdp.step(
get_optimal_action(mdp, state_values, s, gamma=0.9))
rewards.append(r)
if done:
break
total_rewards.append(np.sum(rewards))
print("average reward: ", np.mean(total_rewards))
assert(0.6 <= np.mean(total_rewards) <= 0.8)
print("Well done!")迭代过程如下