目录
[1.1 同时表达旋转和移动](#1.1 同时表达旋转和移动)
[1.1.1 用法](#1.1.1 用法)
[1.1.2 证明过程](#1.1.2 证明过程)
[1.1.3 例题](#1.1.3 例题)
[1.2 基于向量同时表达旋转和移动](#1.2 基于向量同时表达旋转和移动)
[1.2.1 用法](#1.2.1 用法)
[1.2.2 证明过程](#1.2.2 证明过程)
[1.2.3 例题](#1.2.3 例题)
[1.3 多个坐标系的转换](#1.3 多个坐标系的转换)
[1.3.1 用法](#1.3.1 用法)
[1.3.2 连续变换](#1.3.2 连续变换)
[1.3.3 反矩阵](#1.3.3 反矩阵)
一、坐标系的旋转和移动
1.1 同时表达旋转和移动
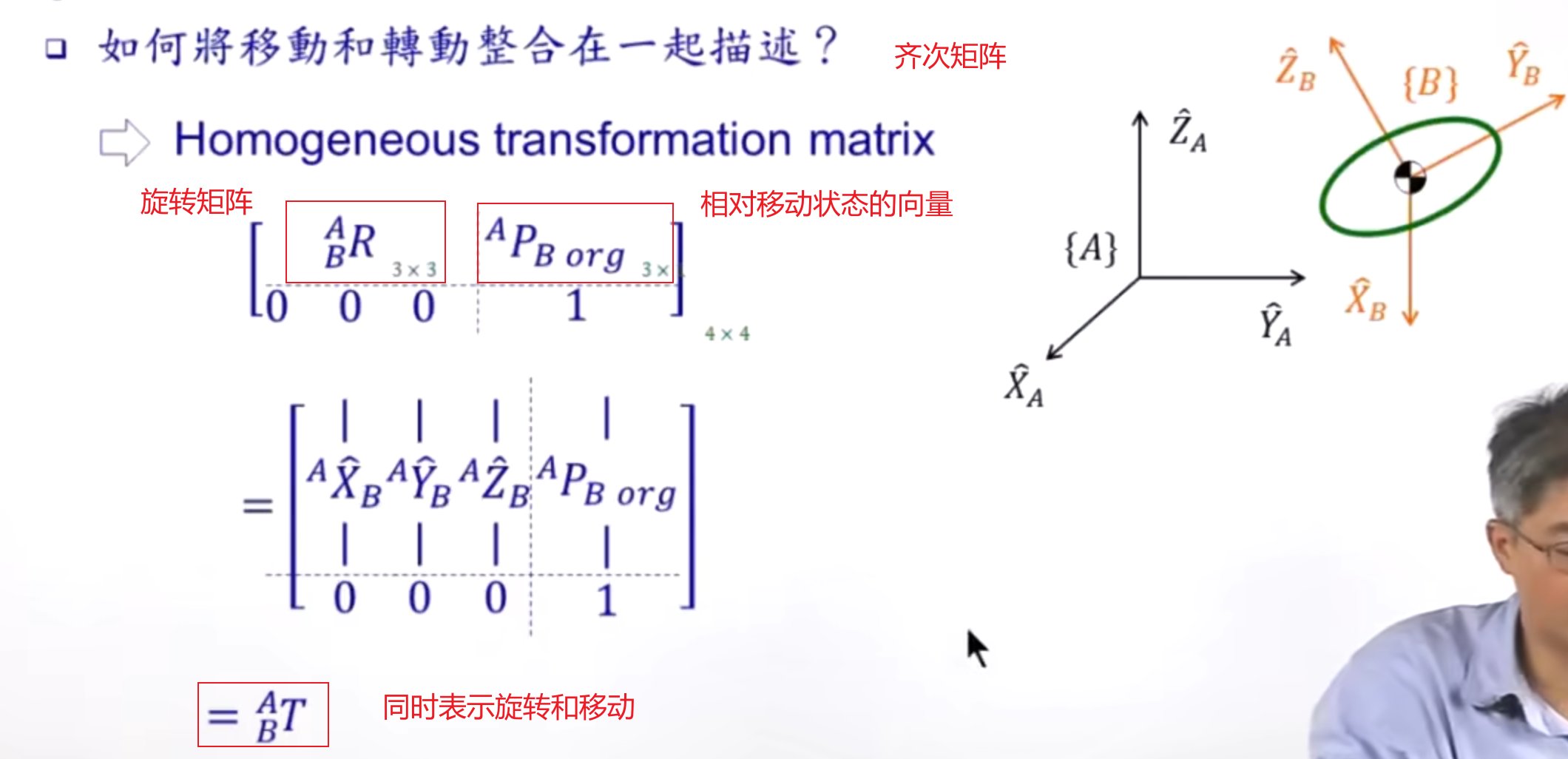
1.1.1 用法
1.1.2 证明过程
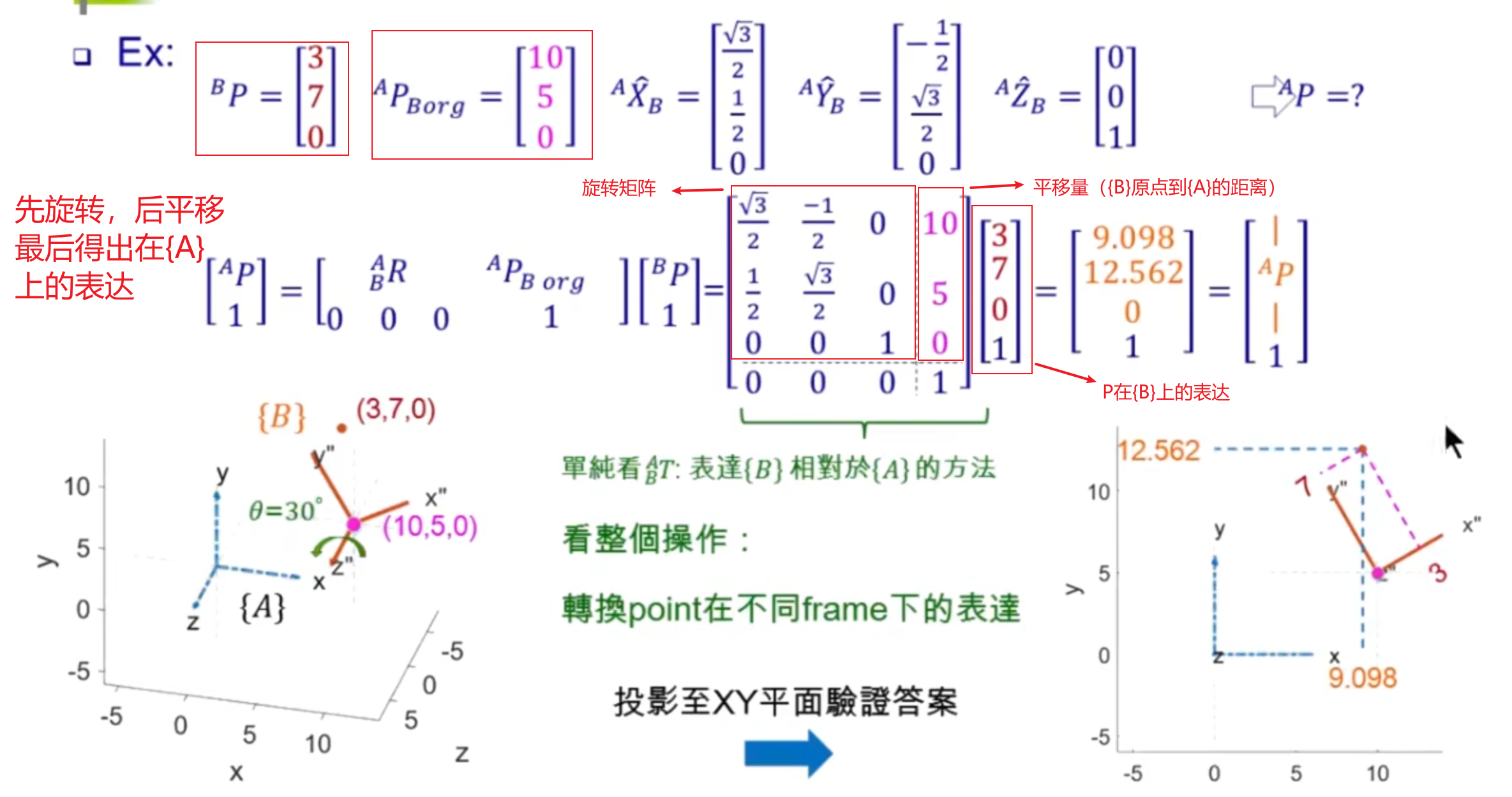
1.1.3 例题
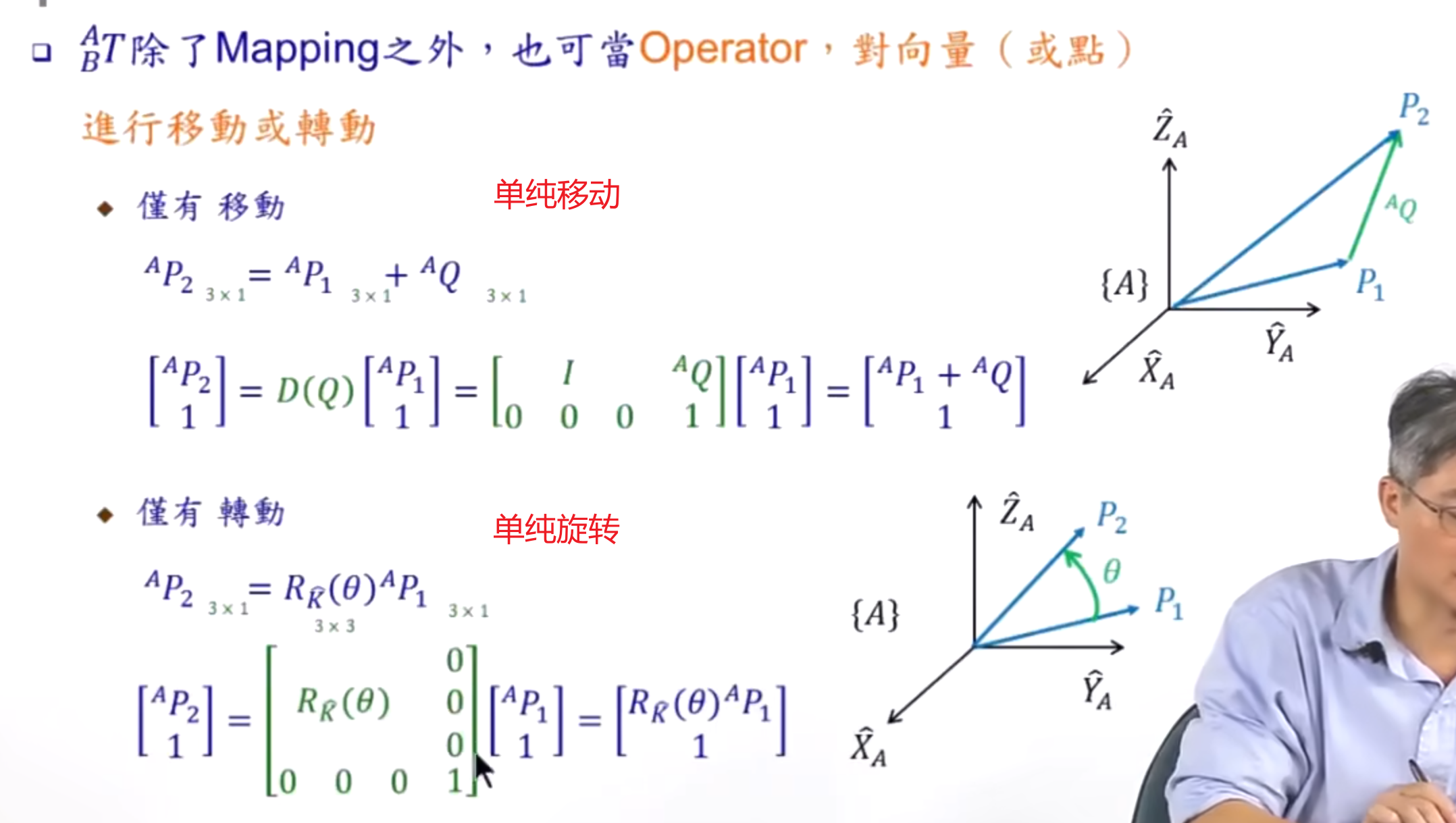
1.2 基于向量同时表达旋转和移动
1.2.1 用法
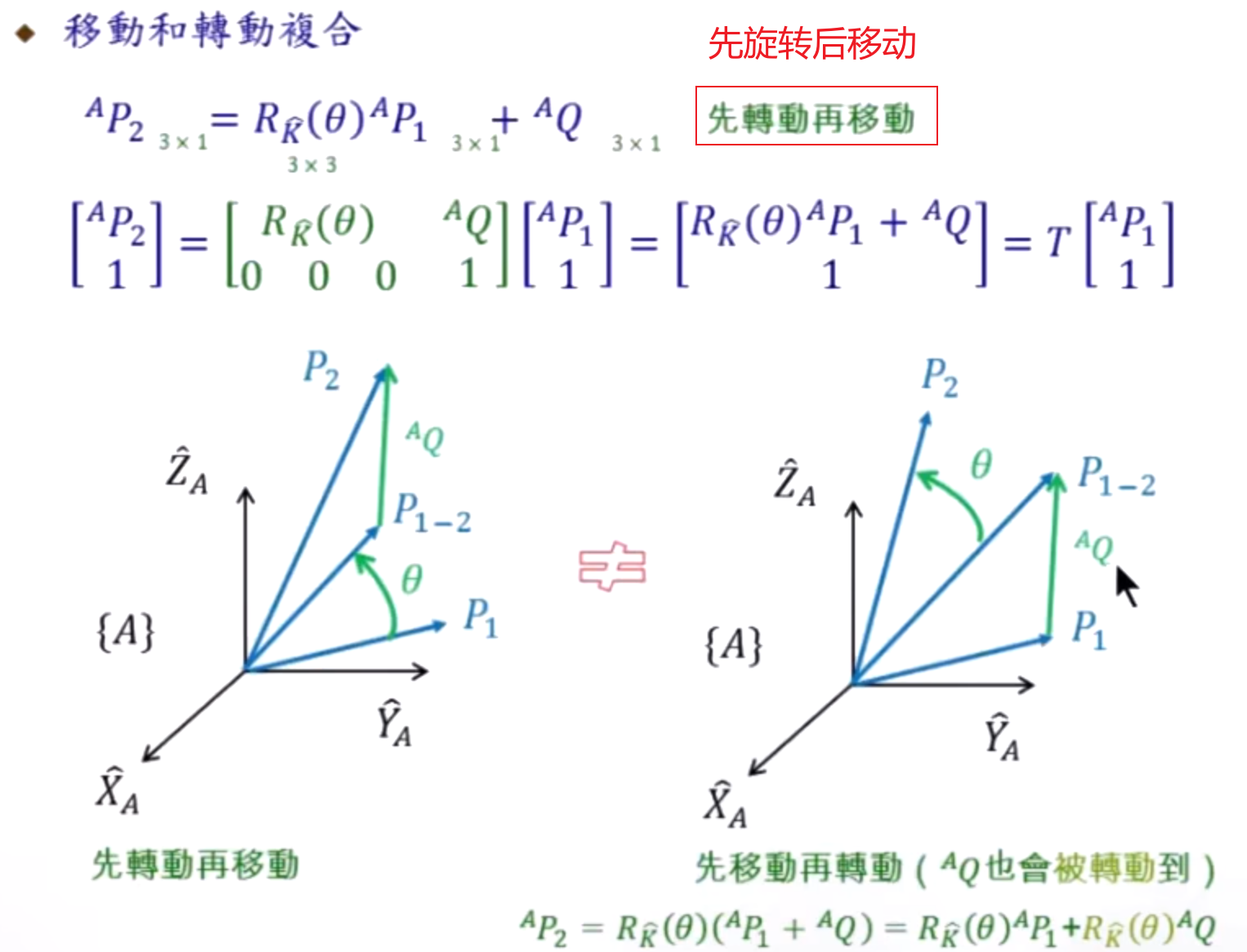
1.2.2 证明过程
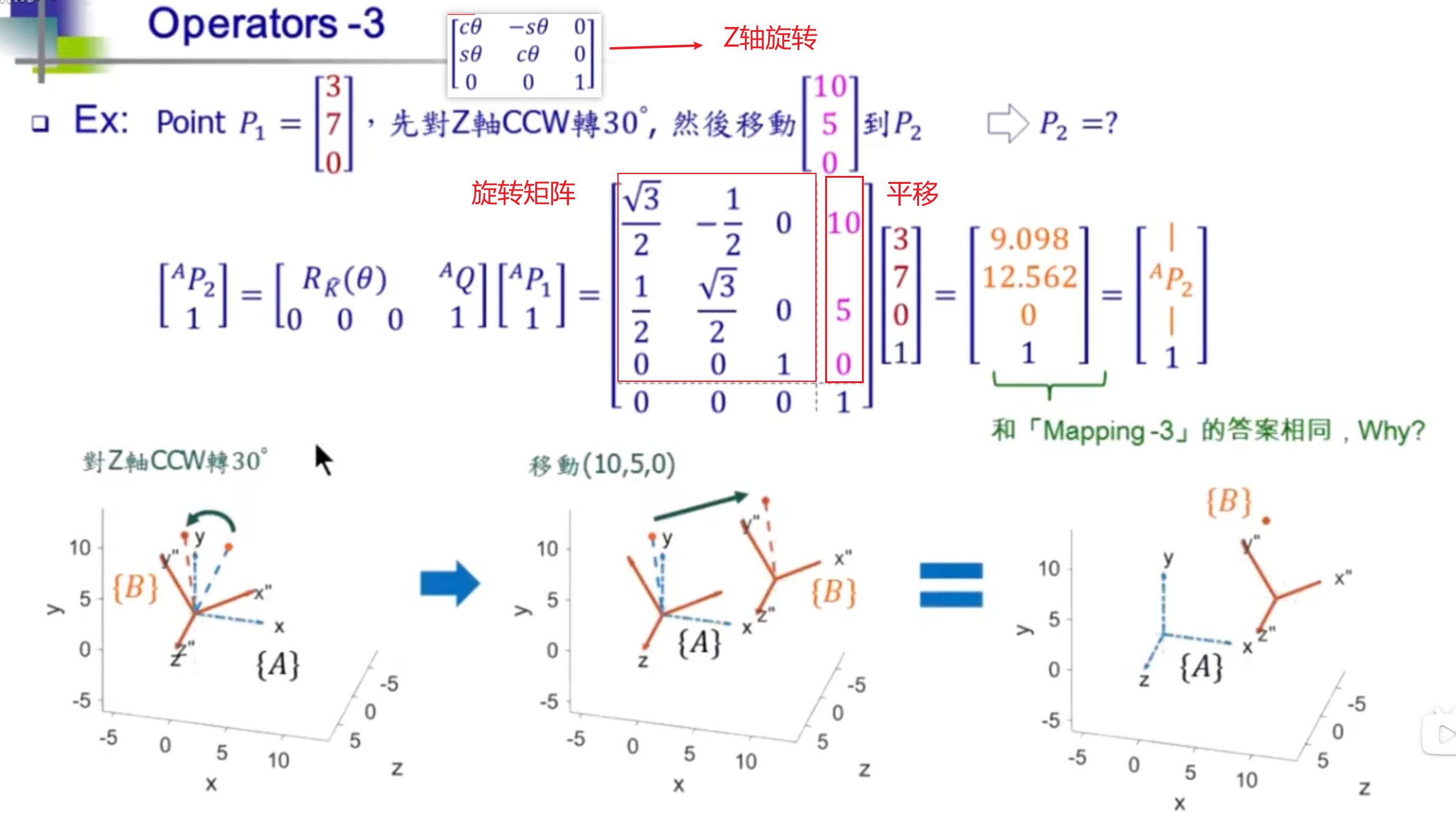
1.2.3 例题
1.3 多个坐标系的转换
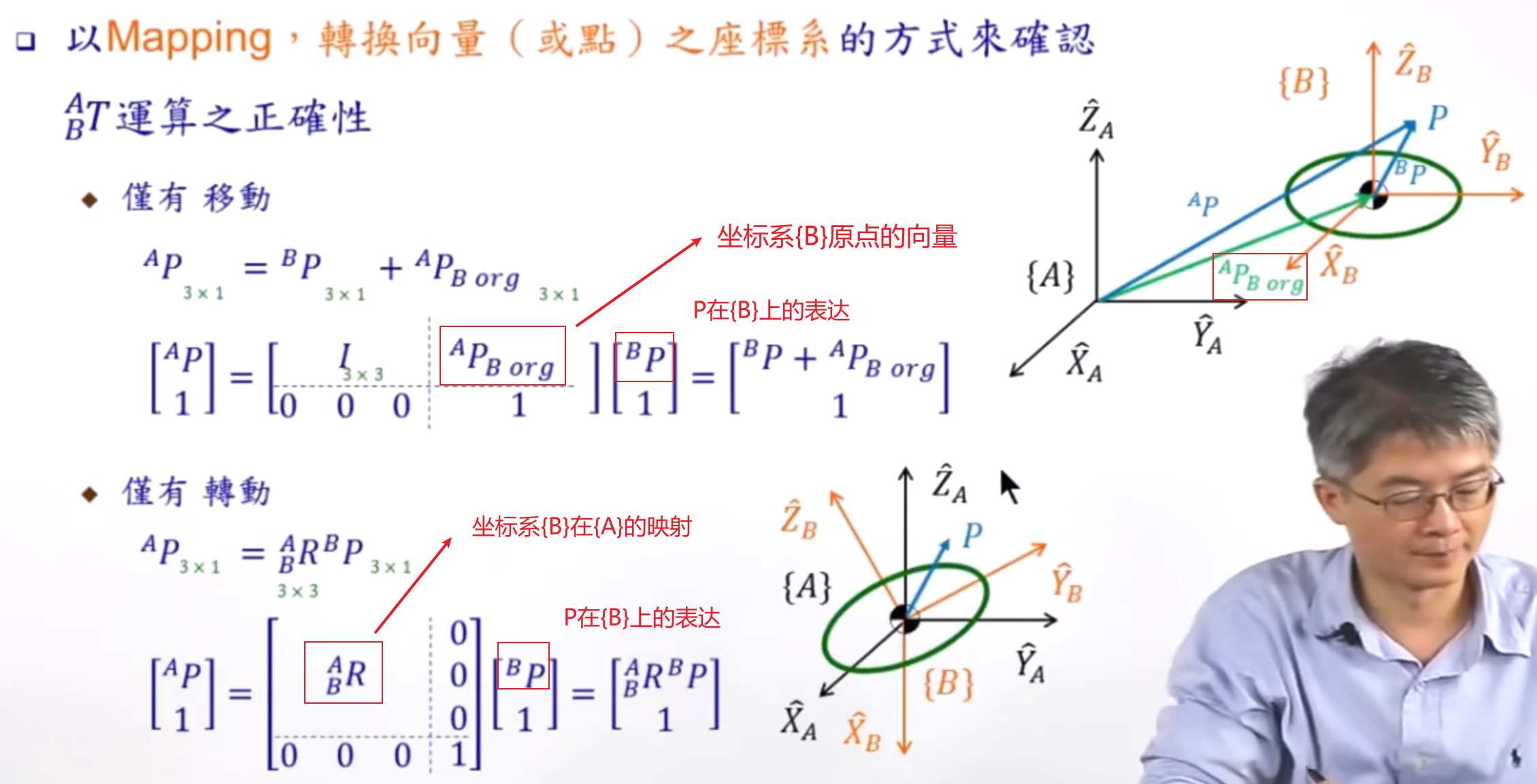
1.3.1 用法


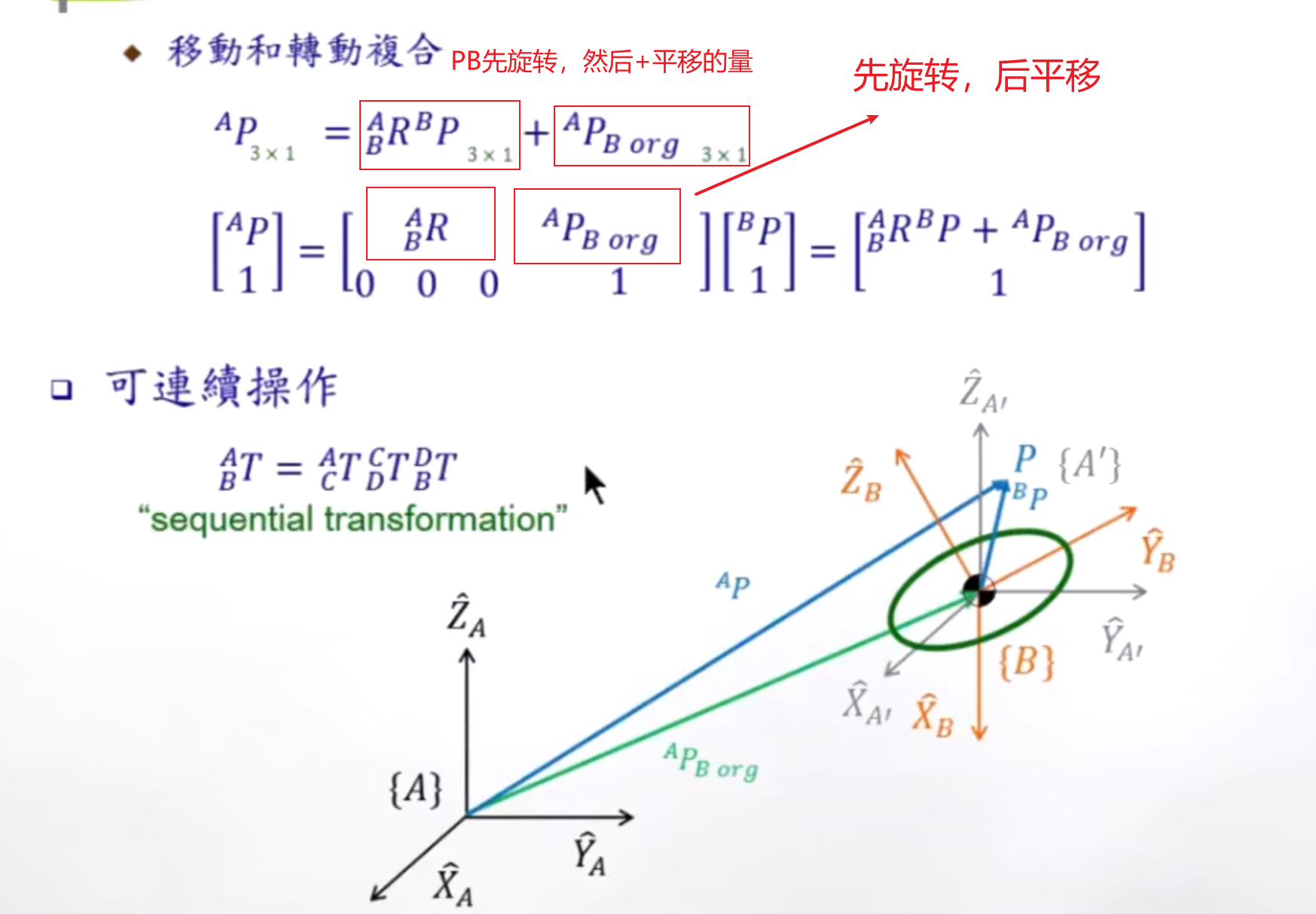
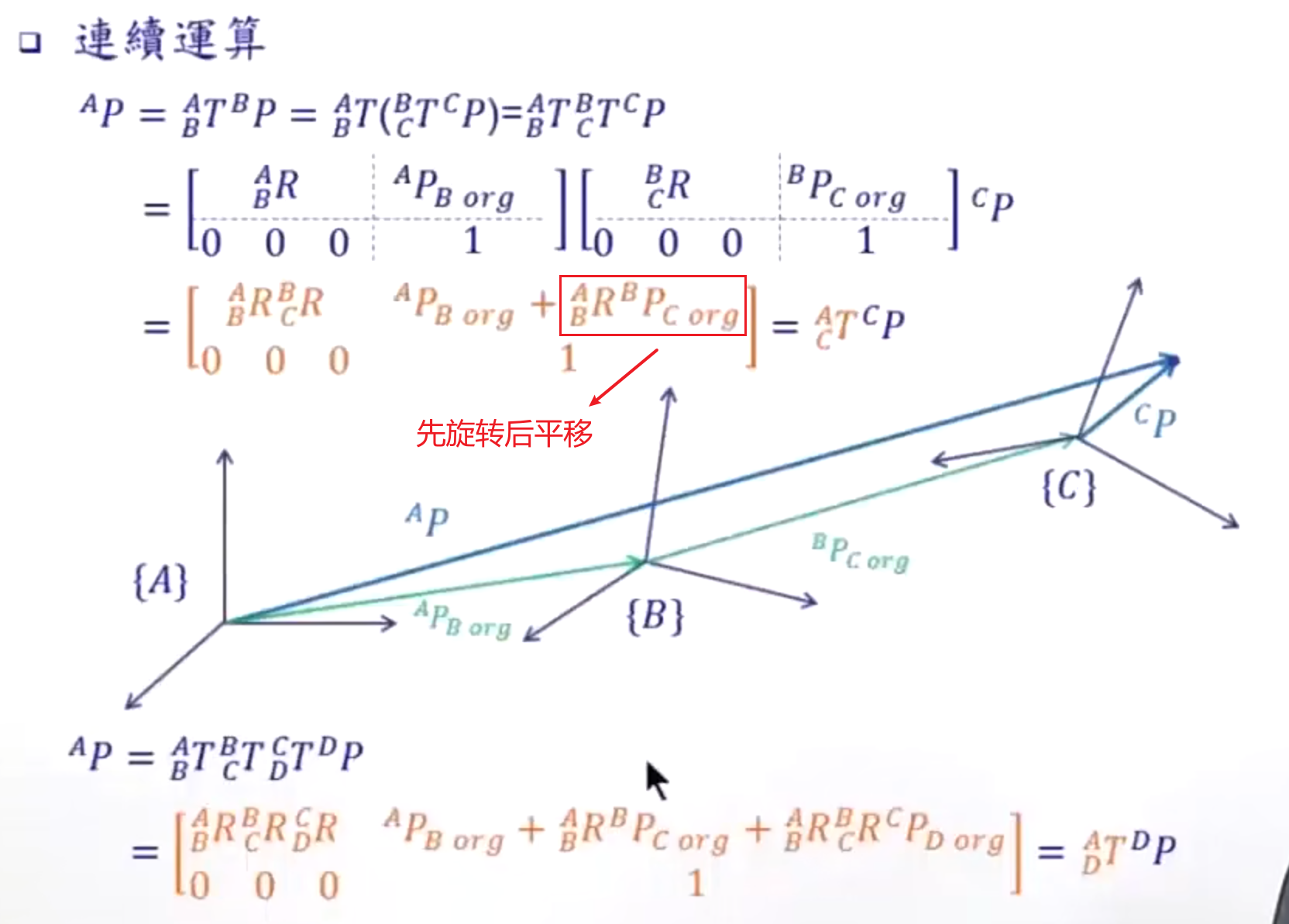
1.3.2 连续变换
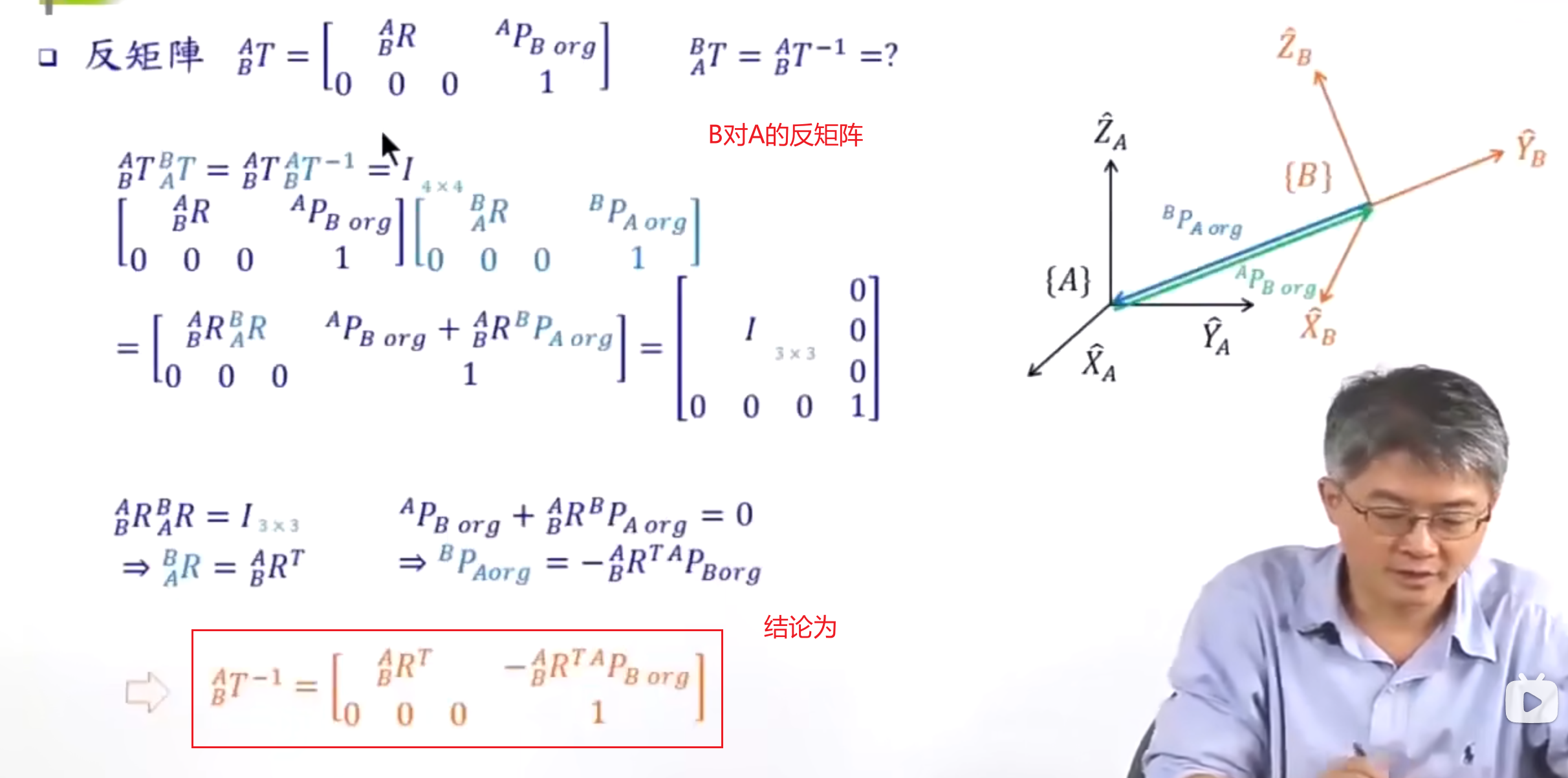
1.3.3 反矩阵