关于架空输电线识别树障or测距相关论文阅读
- 相关中文论文
-
- [基于无人机 LiDAR 和生长模型的输电线走廊树障隐患超前检测方法研究](#基于无人机 LiDAR 和生长模型的输电线走廊树障隐患超前检测方法研究)
- [1. 基于架空输电线路图像语义分割的树木障碍距离测量方法](#1. 基于架空输电线路图像语义分割的树木障碍距离测量方法)
- [2. 基于点云的计算机视觉框架:用于检测树木与配电网线路的距离](#2. 基于点云的计算机视觉框架:用于检测树木与配电网线路的距离)
- [3. 基于机载激光雷达的电力线提取及树木风险检测](#3. 基于机载激光雷达的电力线提取及树木风险检测)
- 利用深度学习检测树木和电线缠绕
- 使用激光雷达和基于密度的聚类对输电线路进行高效的树木障碍物检测和风险评估
- 新型遥感技术在电力巡线树木遮挡检测中的应用研究
- [基于YOLO v7的输电线路走廊树种分类](#基于YOLO v7的输电线路走廊树种分类)
- 基于激光点云的电力线路树木障碍预测技术分析
- 基于机载激光雷达的电力线提取及树木风险检测
声明:略读,不对所提到的文章进行精读,大部分文章都只是略读。
相关中文论文
大概看了一下,几乎没有一个可以用的,或者说提供不了有用的解决问题的思路。
基于无人机 LiDAR 和生长模型的输电线走廊树障隐患超前检测方法研究
2023 年 05 月 27 日
中文论文1
一、研究背景与核心痛点
问题紧迫性:输电线走廊内树木与线路距离过近是引发跳闸、停电甚至森林火灾的主要原因之一,全球 30% 的电力安全事故与天气相关,其中 90% 由树木引发。传统人工巡检效率低、风险高,难以适应大规模电网运维需求。
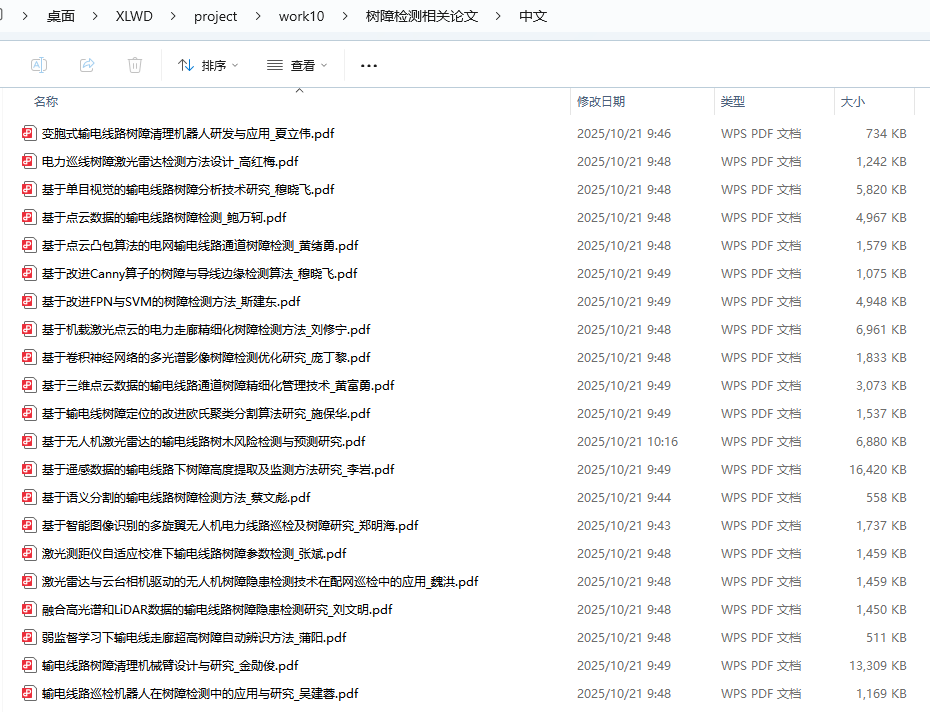
现有技术局限:无人机搭载光学相机的巡检方式存在空间定位精度低、数据处理量大的问题;单纯无人机 LiDAR 虽能获取高精度三维点云,但仅能反映瞬时状态,无法应对树木生长带来的动态隐患;周期性全线路巡检成本高、冗余计算多。

二、研究核心内容与技术方案
论文围绕 "数据获取 - 模型构建 - 高效检测" 三大环节,形成完整技术链条:
-
输电线走廊点云分类与信息提取
-
去噪预处理:采用统计滤波法,通过实验确定最优参数组合(k=30,std_mul=8),有效去除大尺度噪声点,同时保留电力线、树木等关键地物特征。
-
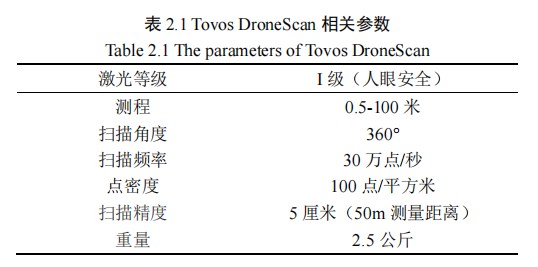
点云分类:结合布料地面滤波与高程变化差值法,实现地面、电力线、杆塔、植被四类点云的精准分类。其中植被和电力线点云提取精度均超 95%,为后续分析奠定高质量数据基础。
-
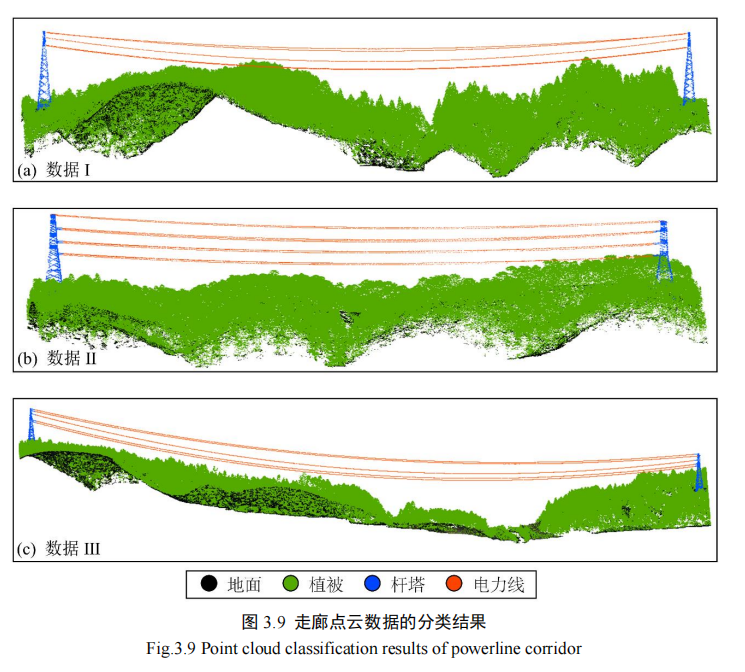
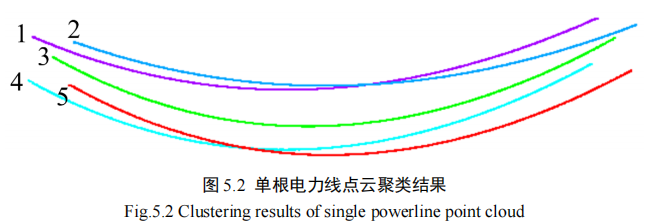
单木信息提取:基于点云自适应聚类算法分割单木,单木分割准确率达 86.5%,树高提取的决定系数 R² 为 0.921,均方根误差 RMSE 为 0.969m,确保单木参数的可靠性。
-
-
分树种树木生长模型构建
- 样本与模型筛选:以研究区优势树种马尾松和桉树为对象,选取双曲线、对数、Richards 等 5 种模型作为候选,通过边界约束条件(树龄趋近 0 时树高趋近 0,树龄无穷大时树高收敛)和拟合精度指标筛选最优模型。
- 最优模型确定:Richards 模型表现最优,对马尾松和桉树的拟合 R² 分别为 0.831 和 0.855,RMSE 分别为 2.189m 和 2.776m,能精准反映树高随树龄的生长规律。
- 参数优化:采用贝叶斯统计法优化模型参数,相比传统最小二乘法,参数稳定性显著提升,且结合先验信息的贝叶斯估计效果更优,进一步提高了生长预测的准确性。
-
基于包围盒的二阶段树障检测方法
-
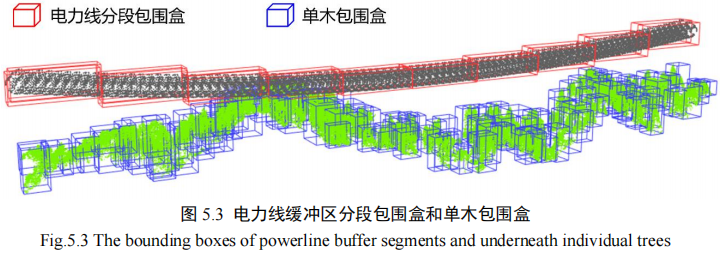
包围盒构建:为电力线(分段构建三维缓冲区)和单木分别构建轴对齐包围盒(AABB),实现复杂点云对象的简化,同时保证几何特征的完整性。
-
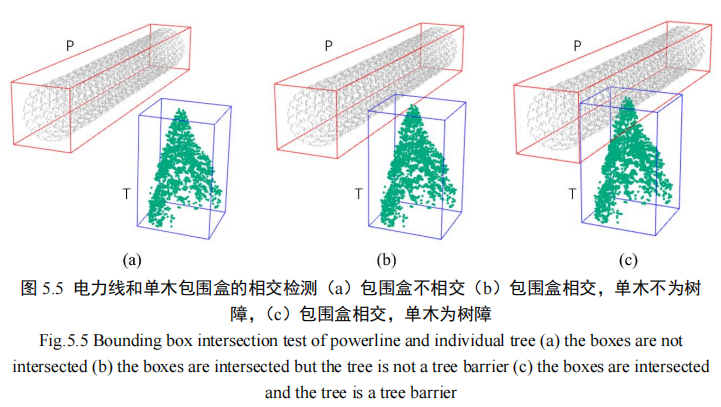
二阶段检测逻辑:第一阶段通过包围盒相交检测,快速排除大量无交集的树线组合;第二阶段仅对包围盒相交的对象,遍历计算点云间实际距离,判断是否超出安全阈值(参考规程设定为 6m)。
-
效率与精度验证:该方法将树障检测平均时间从传统遍历法的 760s 缩短至 10s,且在点云数量增加时性能稳定,适合大规模、长时间序列的树障监测。结合生长模型,可超前预测未来 10 年内的潜在隐患,明确隐患出现的位置和时间节点。
-
三、研究创新点
- 超前检测机制:首次将树木生长模型与无人机 LiDAR 点云数据深度融合,突破了传统 "瞬时检测" 的局限,实现树障隐患的时间维度预测,为预防性运维提供决策依据。
- 高效检测算法:提出的二阶段检测方法通过包围盒简化计算,解决了海量点云数据处理效率低的行业痛点,大幅降低了长时间序列监测的计算成本。
- 精准参数优化:采用贝叶斯统计法优化生长模型参数,充分利用先验信息提升参数稳定性,相比传统方法进一步提高了树高预测的精度和可靠性。
四、研究结论与应用价值
- 核心结论:无人机 LiDAR 结合几何特征分类可高效获取可靠的单木信息;Richards 模型是模拟研究区主要树种生长的最优模型;二阶段检测方法在效率和稳定性上显著优于传统方法,可实现树障隐患的精准超前检测。
- 应用价值:该方案可减少电力部门的巡检工作量和成本,将巡检重点聚焦于潜在隐患区域,提升电网运维的针对性和智能化水平,有效降低树障引发的电力事故风险。
五、不足与未来展望
- 现有局限:树种识别依赖目视解译和野外调查,不适用于长距离走廊;生长模型未考虑地理、气象等环境因素;未考虑电力线在极端天气下的形态变化对树线距离的影响。
- 未来方向:结合机器学习实现大规模树种智能识别;构建多因素耦合的生长模型,提升不同立地条件下的适应性;建立电力线动态形变模型,实现全工况下的树障预警。
总结
树木生长预测模型有点鸡肋,现在感觉激光雷达判断树木和输电线以及之间测距感觉是ok的。
1. 基于架空输电线路图像语义分割的树木障碍距离测量方法
A Tree Barrier Distance Measurement Method based on the Image Semantic Segmentation of Overhead Transmission Lines
2024 The 6th Asia Energy and Electrical Engineering Symposium
研究背景
随着居民和工业对电力依赖度的提升,输电线路的安全稳定运行至关重要。而线路周边快速生长的树木是引发供电故障的重要隐患,准确识别树木障碍并测量其与线路的距离,是保障电力安全的关键。
现有监测方法存在明显局限:
- 基于激光雷达(LiDAR)的技术易受雾、雨、雪等恶劣天气影响,数据质量下降,且产生的海量数据难以高效分析;
- 传统图像识别方法多单独检测树木、杆塔或线路,无法实现多目标协同提取,难以满足精准距离测量的需求。
为此,论文提出一种基于普通光学相机和语义分割技术的低成本、高效解决方案,无需依赖昂贵设备即可实现树木障碍的持续监测与距离计算。
核心技术方案
该方法主要分为三个核心步骤:数据采集、树木障碍提取、距离评估,形成了完整的技术闭环。
1. 数据采集
采用安装在输电杆塔上的普通二维光学相机 ,持续拍摄杆塔及周边树木的图像。该相机成本低、稳定性强、易获取,可大规模部署,解决了传统监测设备成本高、扩展性差的问题。
2. 基于语义分割的目标提取
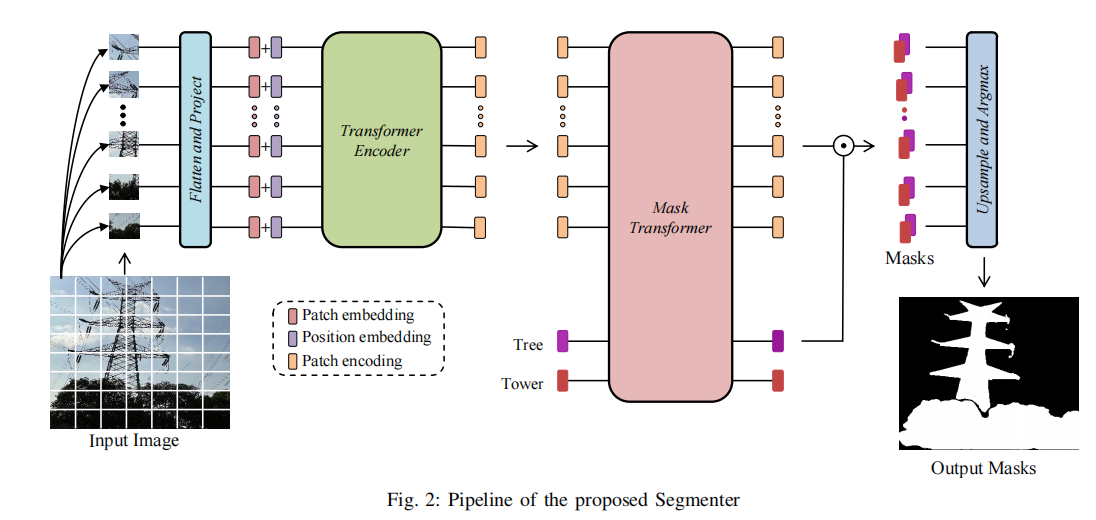
采用基于 Segmenter 的语义分割算法,实现对图像中树木和杆塔的精准分割。
模型选择:选用 Transformer 架构的 Segmenter 作为基础模型,相比传统卷积神经网络(CNNs),其局部注意力机制和移位窗口策略能更好地捕捉图像的全局依赖关系和局部细节,在复杂环境下的分割效果更优;同时对比了 DeepLabV3、U-Net 等经典语义分割模型,验证了所提方法的优越性。
处理流程:先对输入图像进行尺寸标准化(512x512)和归一化预处理;通过骨干网络提取多尺度特征图,再经补丁分割与位置编码后输入 Transformer 模块;最后通过解码器生成概率图,得到树木和杆塔的分割掩码。
边缘坐标获取:利用 OpenCV 的轮廓检测函数提取掩码的边缘坐标,并通过曲率计算识别树木轮廓的极值点(如尖端、拐点),作为后续距离测量的关键特征点,兼顾计算效率与精度。
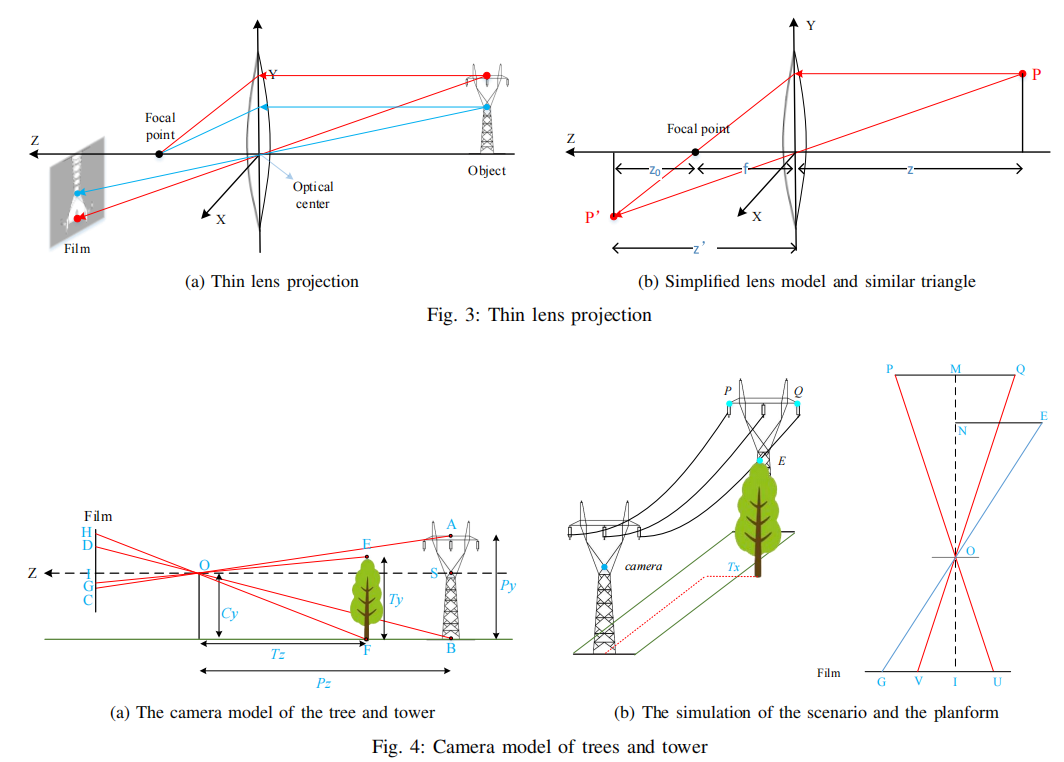
3. 基于深度估计与相机模型的距离计算
结合 Shape from Shading(SFS)深度估计算法和几何光学镜头模型,实现三维距离的精准测量。
深度估计(Tz 计算):采用 SFS 技术,利用单张灰度图像的明暗变化推导物体表面几何信息,无需立体相机或多张图像。通过 Lambertian 反射模型计算表面斜率,结合 Horn 和 Schunck 正则化方法最小化能量函数,求解深度信息 Z (x,y),进而得到树木到相机(杆塔)的水平距离 Tz。
镜头相机模型应用:基于相似三角形原理,构建杆塔与树木的几何相机模型,分别计算树木高度 Ty 和树木与输电线路的水平距离 Tx。利用输电设施的标准化参数(如杆塔高度、相邻杆塔间距)和已知的相机安装高度,通过投影关系推导目标维度,确保计算的准确性。
实验验证结果与贡献
-
实验设置
优化器采用 Adam,学习率采用余弦退火策略,通过随机翻转、裁剪、颜色空间变换等数据增强技术提升模型泛化能力;
实验基于 PyTorch 平台,在 NVIDIA RTX 3090TI 显卡上运行;
采用无人机采集数据集,记录 50 张 RGB 图像中树木和杆塔的实际坐标,用于验证测量精度。
-
核心结果
语义分割性能:所提方法的平均交并比(MIoU)达到 46.5%,像素准确率为 82.2%,显著优于 DeepLabV3(MIoU 37.9%)和 U-Net(MIoU 35.9%),证明了其对树木和杆塔的精准分割能力。
距离测量精度:树木高度、树木到杆塔距离、树木与线路水平距离的测量误差分别为 3.8%、4.0% 和 4.3%,均控制在 10% 以内,满足工程实际需求。误差主要来源于图像中树木冠部和根部标记的偏差,以及人工实测的固有误差。
-
创新价值与贡献
技术创新:提出基于 Segmenter 的语义分割算法,实现树木与杆塔的协同精准提取,解决了传统方法单目标检测的局限性;结合 SFS 深度估计与镜头相机模型,实现单张二维图像的三维距离测量,突破了对昂贵设备的依赖。
实用价值:仅使用普通光学相机即可完成监测任务,成本低、部署灵活,便于大规模推广,为电力公司提供了高效、经济的树木障碍监测方案,有助于提前规避供电风险,降低维护成本。
学术意义:丰富了机器视觉在输电线路监测领域的应用,为复杂背景下的目标分割与距离测量提供了新的技术思路,对相关领域的研究具有参考价值。
总结
ok,但又不是很ok,ok的点在于摄像头安置在杆塔的固定位置,监测杆塔之间的输电线和树木,理论上是相对可行的,且能够根据图象测得输电线与树木的距离(实际测的是杆塔顶部和树木顶部的一个绝对距离)。
不ok的点在于摄像头的位置是固定的,我所摄像的场景是摄像头架设在无人机或者输电线上来去测量输电线距离树木的距离;其次论文里所提出的模型训练的数据集太少,且识别的目标并不是很精细,我所希望的是识别出具体的输电线,杆塔以及树木。
2. 基于点云的计算机视觉框架:用于检测树木与配电网线路的距离
Point Cloud-based Computer Vision Framework for Detecting Proximity of Trees to Power Distribution Lines
41st International Symposium on Automation and Robotics in Construction (ISARC 2024)
https://github.com/QingyongHu/RandLA-Net
一、研究背景与问题提出
配电网线路的安全运维面临植被入侵的严峻挑战,过度生长的树木可能导致停电、火灾等事故。传统人工巡检方法不仅耗费大量人力物力,还存在精度不足、频次有限的问题,难以满足主动运维的需求。
近年来,LiDAR 技术因能提供高分辨率 3D 点云数据,成为电力线路植被监测的重要工具,但也面临核心挑战:海量点云数据的处理效率低,且难以精准分割和分类线路与植被目标。为此,论文提出融合深度学习语义分割、聚类优化与空间查询的一体化框架,解决 LiDAR 数据处理与植被 proximity 检测的关键难题。
二、核心技术方案
该框架分为三个关键阶段:语义分割、后处理优化、距离检测,形成从数据处理到风险评估的完整流程。
-
基于 RandLA-Net 的语义分割
选用 RandLA-Net 模型对 LiDAR 点云数据进行语义分割,重点识别树木、电线杆和配电线三类目标。
- 模型优势:RandLA-Net 通过随机点采样实现下采样,在降低计算复杂度的同时保留点云几何细节;结合局部特征聚合模块(含局部空间编码和注意力池化),能高效捕捉目标局部结构,相比 PointNet++ 等模型,更适合大规模点云处理。
- 数据增强:训练时同时纳入点云的三维坐标(X,Y,Z)、RGB 颜色信息和 LiDAR 反射强度,利用多维度特征提升分类精度,尤其针对电线杆等具有独特颜色特征的目标效果显著。
-
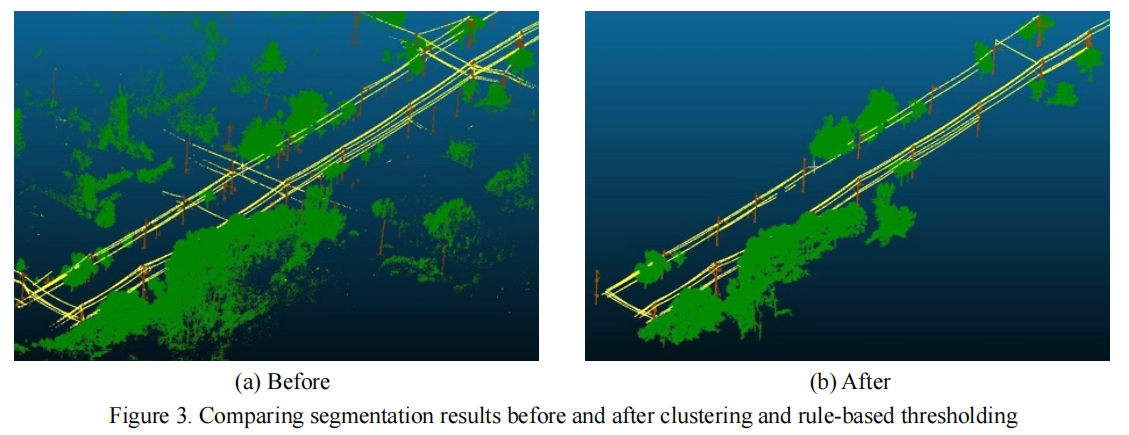
聚类与规则阈值后处理
为优化分割结果、降低噪声干扰,采用 DBSCAN 聚类算法与规则化阈值筛选相结合的后处理策略:
- DBSCAN 聚类:无需预设聚类数量,能自适应识别不同形状和密度的目标集群,通过调整邻域半径(Epsilon)和最小样本数,精准分离树木、电线杆等目标。
- 规则化阈值:针对不同目标类别设定特定阈值,如树木的最小高度(6.5 米)和最小点数(12000 个)、电线杆的最小高度(8 米)和最小点数(500 个),进一步筛选有效目标,剔除无关噪声数据。
-
基于 KDTree 的距离检测
采用 KDTree(K 维树)结构实现树木与配电线的空间 proximity 快速查询,评估安全风险:
- 高效空间查询:KDTree 能快速索引多维度空间中的最近邻点,通过计算每个树木点到配电线的最短距离,大幅提升大规模点云数据的距离计算效率。
- 风险判定:设定 1 米为安全阈值,将距离小于该阈值的树木区域标记为高危区域,为运维决策提供明确依据。
三、实验验证与结果
- 实验设置
- 数据集:采用多伦多 3D 数据集(Toronto-3D),包含 7830 万个点,覆盖 1 公里长的城市道路区域,点云密度高(地面平均 1000 点 / 平方米),含 XYZ 坐标、RGB、反射强度等多维度属性。
- 训练配置:将数据集分为 4 个区段,3 个用于训练,1 个用于测试;采用 Adam 优化器,初始学习率 0.01,每轮衰减 5%,训练 100 轮;实验基于配备 NVIDIA RTX A6000 GPU 的工作站完成。
- 核心结果
- 语义分割精度:纳入 RGB 和反射强度的模型整体准确率达 95.42%,显著高于仅使用几何特征的模型(93.08%)。其中树木、配电线、电线杆的交并比(IoU)分别为 96.81%、87.83%、79.36%,远超同类研究(如 Abongo 等人的配电线 IoU 82.49%)。
- 后处理效果:经 DBSCAN 聚类与阈值筛选后,目标轮廓更清晰,有效剔除了噪声点,提升了后续距离计算的准确性。
距离检测效率:KDTree 空间查询能快速定位高危树木区域,成功标记出距离配电线小于 1 米的植被点,满足大规模场景下的实时监测需求。
四、创新价值与贡献
技术创新:提出 "语义分割 - 后处理 - 距离检测" 的一体化框架,将 RandLA-Net 的高效分割与 KDTree 的快速空间查询相结合,解决了 LiDAR 点云处理效率与精度的矛盾;通过融入 RGB 和反射强度特征,进一步提升了目标分类的准确性。
实用价值:实现植被与配电线距离的自动化、高精度检测,替代传统人工巡检,能帮助电力公司降低运维成本,提前规避安全风险,为主动式植被管理提供技术支撑。
学术意义:丰富了点云技术在电力设施监测领域的应用场景,为复杂城市环境下的目标分割与空间关系分析提供了可借鉴的思路。
五、总结与展望
该论文提出的基于点云的计算机视觉框架,通过 RandLA-Net 语义分割、DBSCAN 聚类优化和 KDTree 距离检测,实现了树木与配电线 proximity 的高效、精准检测。实验结果验证了该方法的优越性,尤其在城市复杂环境中表现出良好的适应性。
未来研究可进一步拓展:一是在更多样的城乡环境中测试框架的通用性,如郊区、山区等;二是优化算法以降低计算资源消耗,适应资源受限的部署场景;三是融合多源数据(如无人机影像、气象数据),实现植被生长趋势预测,提升运维的前瞻性。
总结
基于点云的语义分割然后优化+测距,这个方案可以说是相对完善的。不过还得继续研究一下这个算法的效率,是否是实时可用的。
3. 基于机载激光雷达的电力线提取及树木风险检测
Power Line Extraction and Tree Risk Detection Based on Airborne LiDAR
Published: 3 October 2023
一、研究背景与问题提出
输电线路作为电能传输的核心载体,其安全运行直接关系到社会生产生活。线路走廊内树木过度生长引发的安全隐患(如短路、火灾等)是输电故障的主要诱因之一。传统人工巡检存在强度大、风险高、效率低、主观性强等缺陷,难以满足现代化精准运维需求。
现有技术存在两大核心痛点:
- 电力线提取依赖几何约束和预设参数,忽略空间分布特征,且未有效区分导线与地线,影响运维针对性;
- 树木风险检测多采用全量点云距离计算,未利用输电线路空间特征,导致大量无效计算,效率低下。
为此,论文提出融合空间特征分析、精细化分割与分级距离计算的一体化方案,实现电力线提取与树木风险检测的高效精准。
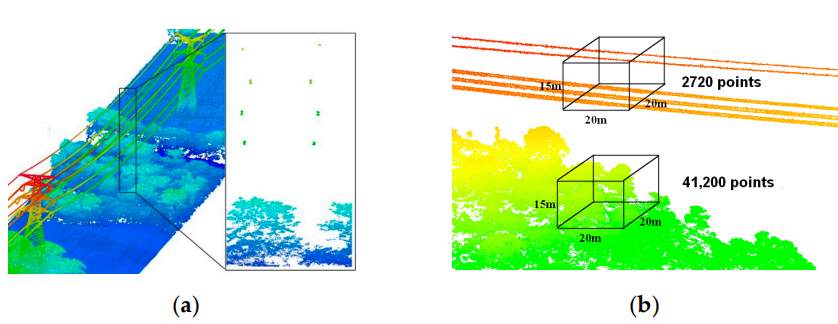
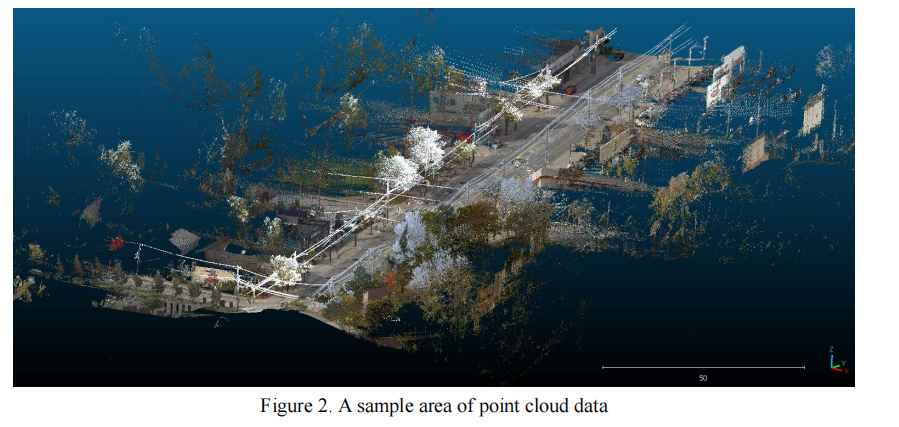
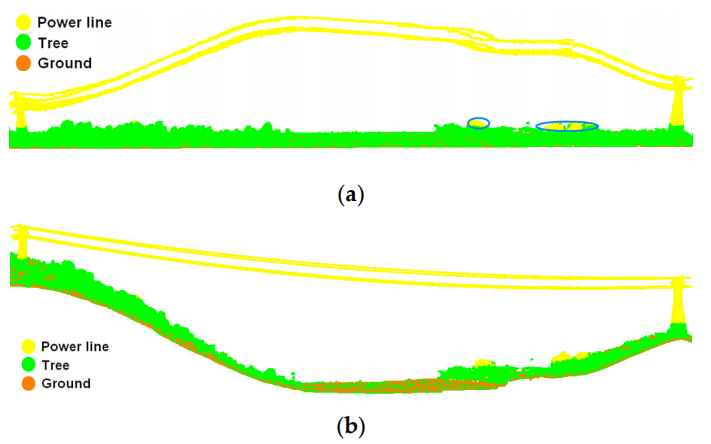
在相同大小的区域内,植被点明显多于电力线点密度。机载雷达盲目探测物体,多个物体点云中混合存在线点,这意味着在统计一些与植被点坐标或个数相关的指标时,植被点被赋予了更大的权重。随机点和地面点最常见,电力线点很少见,因此电力线点密度与植被点密度的比较均适用,如图2b所示。
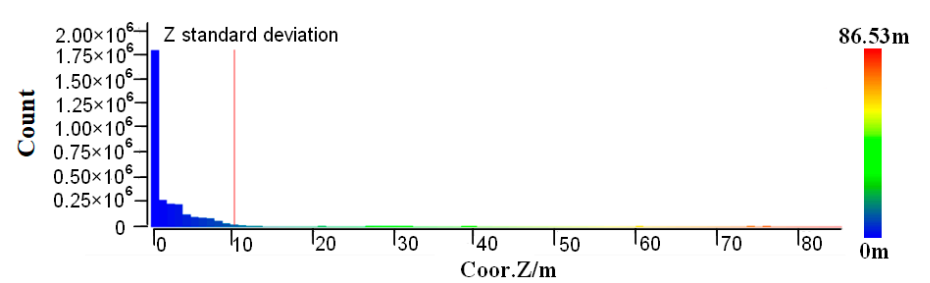
不同高度的点云数
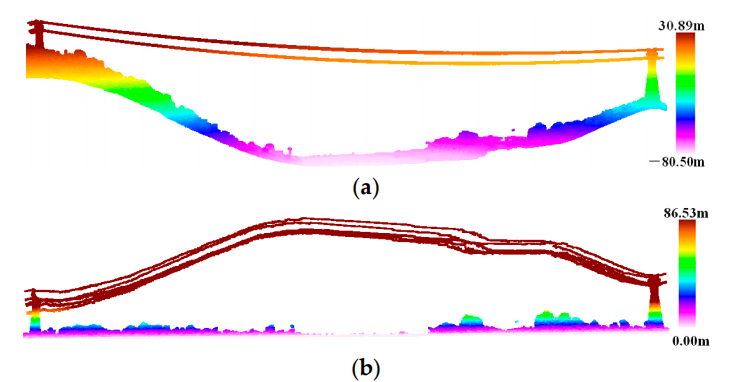
点云高程归一化:(a)通过高程渲染法显示的原始点云高程;(b)通过高程渲染法显示的归一化后点云高程。 地面以上 0-1 米的植被被视为低矮植被。如图 5 所示,点的高程主要分布在 10 米以内,这部分主要由贴近地面的低矮植被构成,其中 0-x ("0 - 某一高度范围")的点数最多。
二、核心技术方案
该方法分为五大关键步骤:输电线路空间分布特征分析、电力线提取、导线与地线区分、导线三维重建、树木风险检测,形成完整技术闭环。
- 电力线提取:粗提取 + 精提取的双层策略
- 粗提取(基于高度差):先根据已知杆塔坐标裁剪点云(走廊宽度通常 100 米),再通过改进的渐进 TIN 加密滤波算法获取地形,对非地面点进行高程归一化;以 1 米为步长统计不同高程的点数,计算 Z 标准差,将高程大于 Z 标准差的点判定为电力线候选点,初步剔除低植被等干扰。
- 精提取(基于局部维度特征概率模型):利用主成分分析(PCA)构建邻域协方差矩阵,通过特征值判断点云局部维度(1D 线性、2D 平面、3D 球形);定义维度特征概率公式,结合最小信息熵理论确定最优邻域半径,筛选出 1D 线性特征概率最高的点作为电力线点;同时加入主特征向量与水平面夹角约束(≤5°),进一步提升分类精度。
电力线粗提取:(a)归一化点云的粗提取效果;(b)图6. 电力线粗提取:(a)归一化点云的粗提取效果;反归一化点云的粗提取。(b)反归一化点云的粗提取。
-
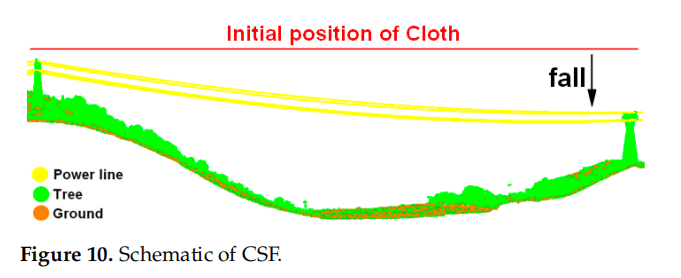
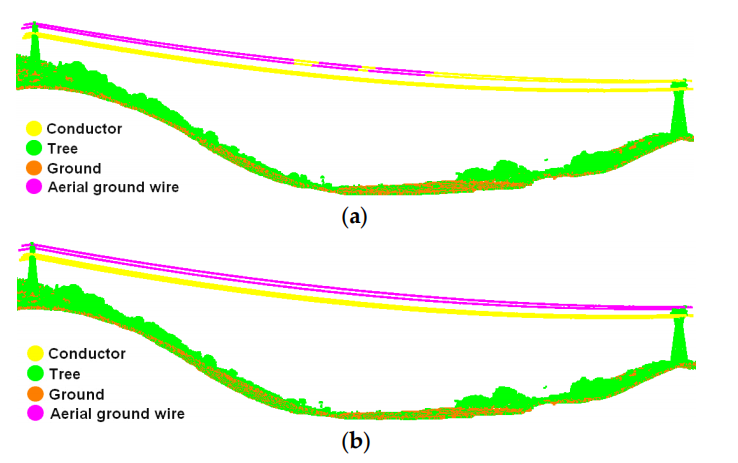
导线与地线区分:CSF 算法 + 邻域共享度聚类
- 粗区分(基于布料模拟滤波,CSF):模拟布料从空中下落至点云表面的物理过程,根据电力线与布料的垂直距离筛选地线候选点(距离小于阈值为地线),但仅能识别部分地线。
- 精区分(基于邻域共享度的区域生长):通过比较两点邻域点集的共享点数判断聚类合理性,共享度越高则越可能属于同一类别,无需计算距离或角度,高效实现地线的完整聚类,准确区分导线与地线。
-
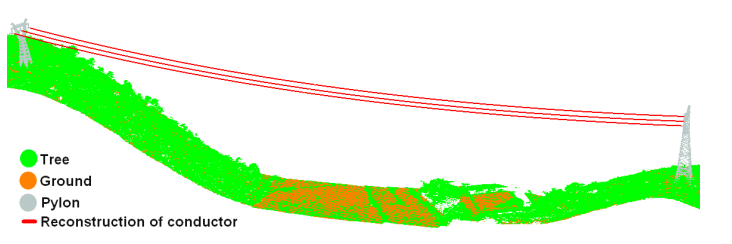
导线三维重建:线性 - 悬链线混合模型
先采用 DBSCAN 算法将多导线点云分割为单导线;在 X-O-Y 投影面用直线方程描述导线形态,通过最小二乘法确定参数;在 X-O-Z 投影面用悬链线方程拟合(简化为四次多项式),结合投影范围因子关联两个投影面的方程,最终实现导线的高精度三维重建。
-
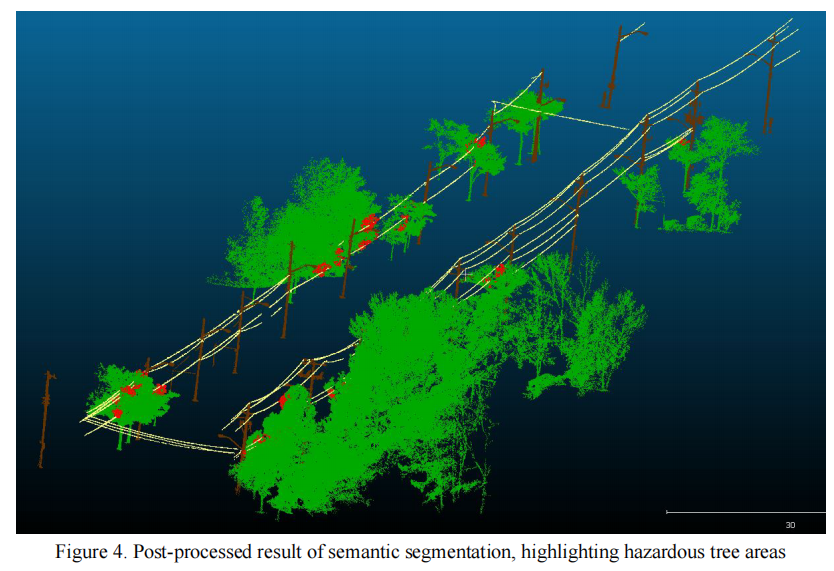
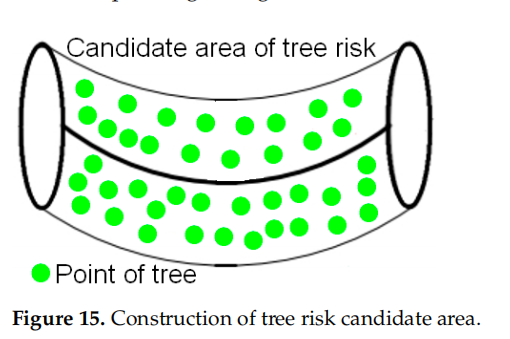
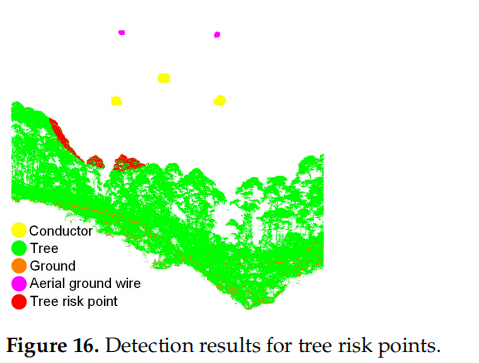
树木风险检测:候选区域构建 + 分级距离计算
-
风险候选区域构建:以导线重建曲线为中心,构建圆柱形候选区域(半径大于对应电压等级的最大安全距离),排除大量非风险点,减少计算量。
-
分级距离计算:先以 3D 网格为单位进行粗略距离计算,剔除距离大于安全阈值的网格;再对剩余网格内的点云进行点对点精确计算,将 0.5 米~安全阈值之间的树木点判定为风险点,避免点云误分类导致的误判。
-
三、实验验证与结果
- 实验设置
- 数据集:采用奥地利 Rigel VUX-240 机载 LiDAR 系统采集的三组不同电压等级(110kV、220kV、500kV)的输电线路点云,覆盖平原、丘陵、山地等地形,线路长度 376 米~591 米。
- 评价指标:电力线分类采用精确率(Precision)、召回率(Recall)、F 分数(F-score);导线重建采用均方根误差(RMSE)、最大误差(E_max)、最小误差(E_min);树木风险检测采用平均绝对误差(MAE)。
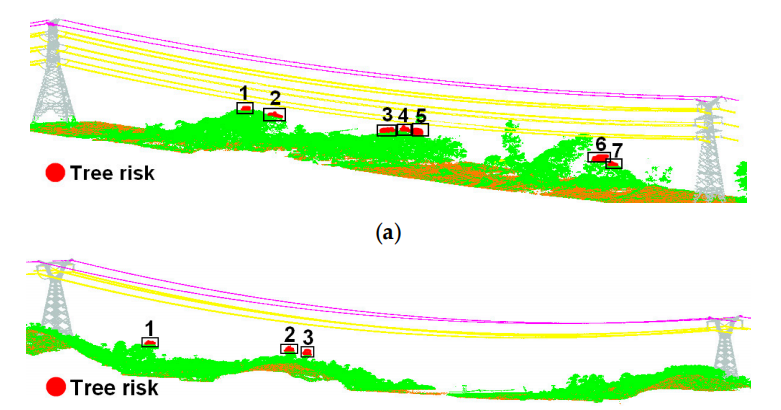
- 核心结果
- 电力线分类精度:导线分类的精确率、召回率、F 分数均超过 98.05% 、99.00%、98.58%;地线分类的三项指标均优于 97.98%、99.14%、98.56%,仅在杆塔悬挂点附近存在少量误分类。
- 导线重建精度:110kV、220kV、500kV 线路的重建 RMSE 分别为 2.76cm、3.35cm、3.67cm,最大误差均小于 7.13cm,远优于国家电网 0.5 米的误差阈值。
- 树木风险检测精度:110kV 和 500kV 线路的风险点检测数量与参考值完全一致,MAE 分别为 6.47cm 和 5.53cm,扣除 LiDAR 自身 1-2cm 的测距误差后,实际 MAE 小于 5cm;检测效率较传统点对点计算提升约 60%。
四、创新价值与贡献
技术创新:提出最小信息熵约束的局部维度特征概率模型,实现复杂场景下电力线的精准提取;融合 CSF 算法与邻域共享度聚类,首次实现导线与地线的自动化精准区分;构建风险候选区域与分级距离计算策略,大幅提升检测效率。
实用价值:基于机载 LiDAR 实现全流程自动化,替代传统人工巡检,适用于不同电压等级和地形的输电线路;检测精度满足工程需求,能为运维人员提供明确的风险点位置,降低停电事故发生率,减少运维成本。
学术意义:丰富了 LiDAR 点云在电力行业的应用方法,为电力线提取、目标区分与风险检测提供了新的技术思路,对相关领域研究具有参考价值。
五、总结与展望
该论文提出的方法通过多步骤精细化处理,实现了电力线提取、导线与地线区分、三维重建及树木风险检测的高效精准,实验结果验证了其稳定性和实用性。
未来研究可拓展方向:结合导线拟合曲线与风、温度、覆冰等外部条件,模拟不同工况下的导线形态,实现工况模拟下的树木风险检测;充分利用点云强度信息和回波次数,进一步提升分类精度。
总结
没有用深度学习的方法对点云数据进行分类,用的是相对传统的方法,的确是新思路,这个也确实是机载LiDAR实现的全流程,这个检测精度是很diao的,算法的速度应该可以,这个只是基于纵向高度的区分,算法的速度应该可以。
利用深度学习检测树木和电线缠绕
Detecting tree and wire entanglements with deep learning
2022年5月8日
使用激光雷达和基于密度的聚类对输电线路进行高效的树木障碍物检测和风险评估
Efficient Tree Obstacle Detection and Risk Evaluation for Transmission Lines Using LiDAR and Density-Based ClusteringEfficient Tree Obstacle Detection and Risk Evaluation for Transmission Lines Using LiDAR and Density-Based Clustering
2025 6th International Conference on Electrical Technology and Automatic Control
一、研究背景与问题提出
树木侵入输电线路走廊是全球电网运维的重大隐患,可能引发电弧放电、大面积停电甚至森林火灾,造成严重的经济与社会损失。传统人工巡检方法存在劳动强度大、效率低、主观性强、距离测量精度不足等缺陷,难以满足现代化电网的精准运维需求。
LiDAR 技术虽能生成高精度三维点云数据,为线路走廊监测提供新途径,但现有基于 LiDAR 的方法仍面临三大挑战:一是密集点云中单棵树木的鲁棒分割难度大,尤其在植被结构复杂区域;二是电力线悬链线建模易受噪声、遮挡等因素干扰;三是缺乏将几何测量转化为可操作风险评估的系统框架。为此,论文提出一体化技术方案,针对性解决上述问题。
二、核心技术方案
该方法分为四大关键阶段:点云预处理、DBSCAN 聚类树木识别、RANSAC 电力线检测、树线距离计算与风险分类,形成从数据处理到决策支持的完整流程。
- 点云预处理:降噪、降维与地面分离
为提升数据质量并降低后续计算复杂度,预处理包含三步核心操作:
统计离群点去除:计算每个点到其 k 个最近邻的平均距离,剔除超出全局均值与标准差阈值(α=2.5)的噪声点,本实验中剔除率达 1.51%,有效净化点云数据。
体素下采样:将三维空间划分为固定大小(0.05 米)的体素,用每个体素内所有点的质心替代原始点,在保留关键几何特征的前提下,将点云数据量压缩 12.37%,提升处理效率。
地面分割:采用渐进形态滤波算法,通过分析局部邻域的高程差异分离地面与非地面点,构建数字地形模型,为后续植被与电力设施的隔离分析奠定基础。实验中成功将 1.6% 的点归类为地面点,98.4% 归类为非地面点。 - DBSCAN 聚类树木识别:精准分割复杂植被
针对树木冠层形状不规则、点云密度不均的问题,采用密度基于空间聚类的 DBSCAN 算法实现树木识别:
聚类原理:通过邻域半径(ε)和最小点数(MinPts)两个参数,将密度足够大的区域划分为聚类,自动识别任意形状的树木簇,同时过滤噪声点。参数通过 k 距离图自适应确定,MinPts 取值范围为 15-25,ε 取值范围为 0.8-1.2 米。
多准则筛选:对聚类结果进一步通过点密度、形状因子和高度分布三个指标筛选,剔除建筑物、杆塔等非植被目标,降低误检率。该方法无需预设聚类数量,对复杂植被结构的适应性强。 - RANSAC 电力线检测:鲁棒拟合悬链线
采用随机抽样一致性(RANSAC)算法实现电力线的精准检测,克服噪声与遮挡的干扰:
线性模型拟合:在预设高程范围内,迭代随机选取样本点拟合直线模型,通过统计符合距离阈值的内点数量确定最优模型,有效抵抗异常值影响。
多段拟合悬链线:考虑到电力线的下垂特性,将其建模为多段连续的直线段,通过约束相邻线段端点的距离(δ)保证拟合的连续性,实现对悬链线的高效逼近,平均拟合误差仅 0.12 米。 - 树线距离计算与风险分类:量化评估并支持决策
通过计算树木与电力线的最小距离,结合行业标准进行风险分级,为运维提供明确依据:
距离计算优化:先计算电力线与树木凸包的最小距离,仅当该距离小于保守阈值时,再进行点对点精确计算,兼顾精度与效率。同时引入缓冲因子(β=0.05-0.15),考虑树木生长速率与风偏等环境因素,修正有效安全距离。
三级风险分类:根据有效距离将树木划分为三类风险等级:安全(>5 米,低风险)、预警(2-5 米,中风险)、高危(<2 米,高风险),并支持地理信息系统集成,直观呈现风险分布。
三、实验验证与结果
- 实验设置
- 数据集:采用 Velodyne HDL-64E LiDAR 扫描仪搭载无人机,采集广东某 35kV 输电线路走廊的点云数据,平均点密度达 38 点 / 平方米,涵盖平原、丘陵、山地等多样地形。
- 评价指标:以树木检测准确率、电力线检测准确率、处理时间及风险分类现场验证准确率为核心评价指标。
- 核心结果
检测精度:树木检测平均准确率达 92.1%(平原 94.7%、丘陵 92.1%、山地 89.3%),显著优于 k 均值(78.3%)、层次聚类(82.6%)等传统方法;电力线检测平均准确率达 88.3%,多段拟合策略有效应对悬链线建模需求。 - 处理效率:每公里走廊的处理时间仅 78 秒,较传统方法提升 67%,满足大规模线路监测的时效性要求。
风险评估准确性:风险分类结果与现场实测的整体一致性达 92.3%,其中高危区域(<1 米)的识别准确率为 100%,成功定位 7 处急需处理的安全隐患。
四、创新价值与贡献
- 技术创新:整合 DBSCAN 与 RANSAC 算法,分别解决复杂植被分割与噪声环境下电力线拟合的核心难题;通过多阶段预处理与优化计算策略,实现精度与效率的平衡。
- 实用价值:构建标准化风险分级体系,直接为运维优先级排序提供量化依据,替代传统人工巡检,降低人力成本,提升电网安全保障的前瞻性与针对性。
- 场景适应性:在平原、丘陵、山地等多样地形中均表现出稳定性能,且处理流程可扩展至不同电压等级的输电线路,具有广泛的工程应用前景。
五、总结与展望
该论文提出的基于 LiDAR 与密度聚类的树木障碍检测方法,通过系统化的技术流程实现了输电线路植被风险的自动化、高精度评估。实验结果验证了方法的有效性与高效性,为智能电网植被管理提供了重要技术工具。
未来研究可进一步拓展:一是结合树木生长模型与时序 LiDAR 数据,实现风险的预测性评估;二是优化算法参数的自适应调节机制,提升在极端环境(如高密度森林、强风区)中的鲁棒性;三是融合多源数据(如无人机影像、气象数据),构建更全面的风险评估体系。
新型遥感技术在电力巡线树木遮挡检测中的应用研究
基于YOLO v7的输电线路走廊树种分类
Classification of Tree Species in Transmission Line Corridors Based on YOLO v7
发布日期:2023年12月28日
基于激光点云的电力线路树木障碍预测技术分析
Analysis of tree obstacle prediction technology for power lines based on laser point cloud
基于机载激光雷达的电力线提取及树木风险检测
Power Line Extraction and Tree Risk Detection Based on Airborne LiDAR
发布日期:2023年10月3日