深入浅出 Tokio 源码:掌握 Rust 异步编程的底层逻辑
目录
[深入浅出 Tokio 源码:掌握 Rust 异步编程的底层逻辑](#深入浅出 Tokio 源码:掌握 Rust 异步编程的底层逻辑)
[一、Rust 异步基石:Future 与 Waker 机制](#一、Rust 异步基石:Future 与 Waker 机制)
[1.1 Future 的状态机本质](#1.1 Future 的状态机本质)
[1.2 Waker:异步世界的信使](#1.2 Waker:异步世界的信使)
[二、Tokio 运行时架构:多线程调度与 I/O 驱动](#二、Tokio 运行时架构:多线程调度与 I/O 驱动)
[2.1 多线程工作窃取调度器](#2.1 多线程工作窃取调度器)
[2.2 I/O 驱动:Reactor 模式与事件分发](#2.2 I/O 驱动:Reactor 模式与事件分发)
[Reactor 模式的核心思想](#Reactor 模式的核心思想)
[Tokio I/O 驱动的内部实现](#Tokio I/O 驱动的内部实现)
[三、Tokio 核心组件源码深度拆解](#三、Tokio 核心组件源码深度拆解)
[3.1 任务(Task):Future 的运行时载体](#3.1 任务(Task):Future 的运行时载体)
[3.2 调度器(Scheduler):工作窃取的实现细节](#3.2 调度器(Scheduler):工作窃取的实现细节)
[3.3 I/O 驱动(Driver):从 epoll 到 Waker 的桥梁](#3.3 I/O 驱动(Driver):从 epoll 到 Waker 的桥梁)
[四、Tokio 与其他运行时的对比](#四、Tokio 与其他运行时的对比)
[4.1 设计哲学的差异](#4.1 设计哲学的差异)
[4.2 技术实现与生态](#4.2 技术实现与生态)
[4.3 对比总结](#4.3 对比总结)
摘要
Rust 的异步编程模型以其零成本抽象和内存安全特性,为构建高性能、高可靠性的系统提供了强大支持。然而,async/await 语法糖背后隐藏着复杂的运行时机制,而 Tokio 作为事实上的标准异步运行时,正是驱动这一切的核心引擎。本文旨在深入 Tokio 的源码世界,从任务调度、I/O 驱动到内存管理,层层剖析其内部实现原理,帮助开发者不仅会用,更能理解其"为什么"如此设计。通过本文,您将建立起对 Rust 异步生态底层逻辑的系统性认知,从而编写出更高效、更优雅的异步代码。

一、Rust 异步基石:Future 与 Waker 机制
在深入 Tokio 之前,必须先理解 Rust 异步编程的基石:
Futuretrait 和Waker机制。Tokio 的一切设计都围绕着高效地轮询(Poll)和唤醒(Wake)这些Future。
1.1 Future 的状态机本质
Rust 中的 async fn 本质上是一个语法糖,它会被编译器"脱糖"(desugar)成一个状态机,并实现 Future trait。Future 的核心是一个 poll 方法:
pub trait Future {
type Output;
fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output>;
}poll 方法返回 Poll::Pending 或 Poll::Ready(T)。当一个 Future 被轮询时,如果它所依赖的资源(如网络数据、文件读取)尚未就绪,它会返回 Poll::Pending,并将一个 Waker 注册到该资源上。一旦资源就绪,Waker 就会被调用,通知运行时可以再次轮询这个 Future 了。
1.2 Waker:异步世界的信使
Waker 是一个关键的抽象,它封装了如何唤醒一个特定 Future 的逻辑。在 Tokio 的实现中,Waker 通常包含一个指向任务(Task)的指针。当 I/O 事件发生时,Tokio 的 Reactor 会通过 Waker 找到对应的任务,并将其放入调度器的就绪队列中,等待被执行。
理解 Future 和 Waker 的协作机制,是理解 Tokio 乃至所有 Rust 异步运行时的起点。Tokio 的精妙之处在于,它将这套底层机制封装得极为高效,同时提供了简洁的 API。
二、Tokio 运行时架构:多线程调度与 I/O 驱动
Tokio 的核心是一个高性能的运行时,它主要由两个关键组件构成:任务调度器 (Scheduler)和 I/O 驱动(Reactor/Driver)。它们协同工作,实现了高效的异步任务管理和非阻塞 I/O。
2.1 多线程工作窃取调度器
Tokio 默认使用一个多线程的工作窃取(Work-Stealing)调度器。其架构如下图所示:
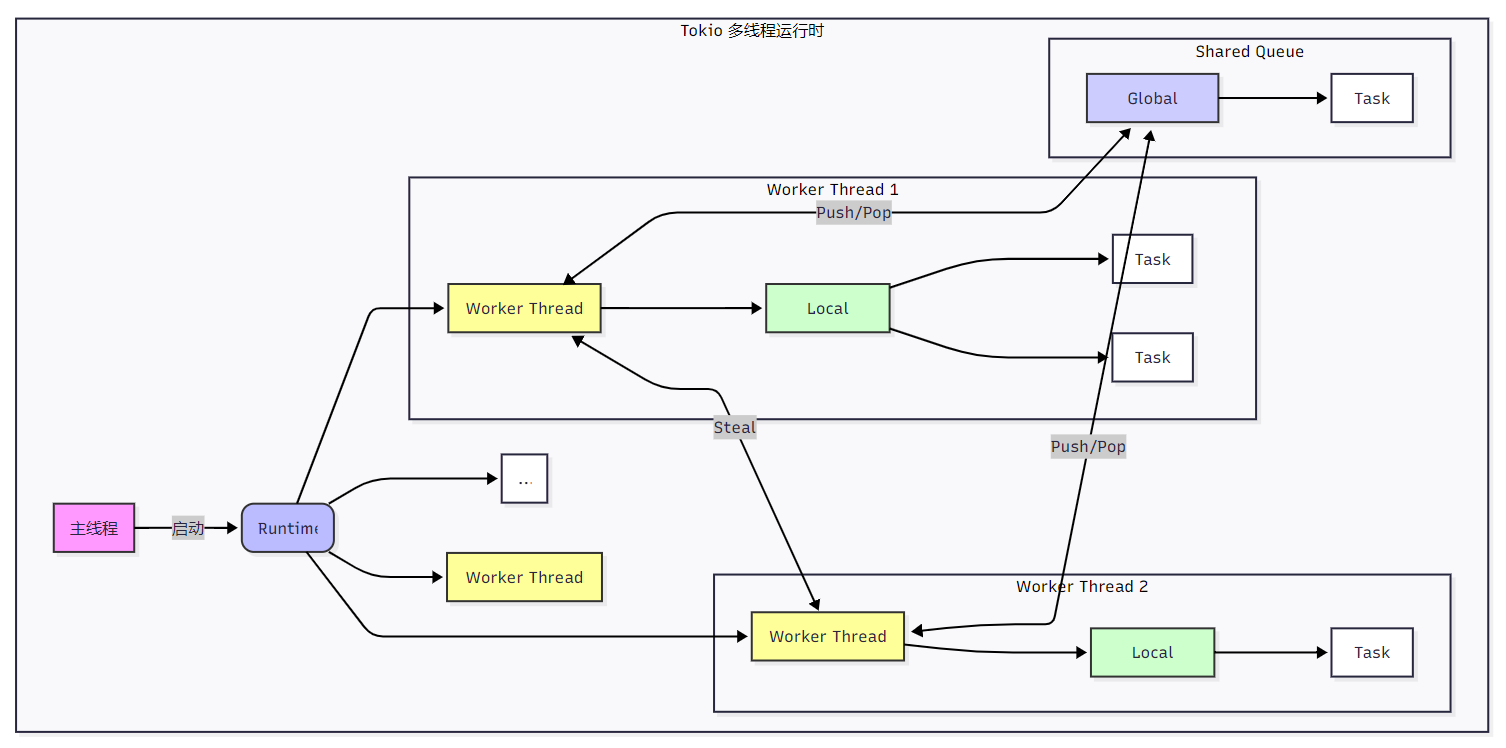
图1:Tokio 多线程运行时架构
每个工作线程(Worker Thread)都有一个本地队列 (Local Queue),用于存放它自己生成的任务。当一个线程自己的队列为空时,它会尝试从其他线程的队列末尾"窃取"任务来执行,这极大地减少了线程间的竞争,提高了 CPU 缓存的局部性。此外,还有一个全局队列 (Global Queue),用于存放那些无法确定归属的任务(例如从非 Tokio 线程通过 Handle 生成的任务)。
2.2 I/O 驱动:Reactor 模式与事件分发
如果说调度器是 Tokio 的"大脑",负责思考和分配任务,那么 I/O 驱动就是它的"神经系统",负责感知外部世界(网络、磁盘等)的变化,并将这些变化转化为任务可以理解的信号。Tokio 的 I/O 驱动是其高性能异步 I/O 能力的核心,其实现基于经典的 Reactor 模式,并针对 Rust 的所有权和生命周期模型进行了深度优化。
Reactor 模式的核心思想
Reactor 模式的核心在于事件分离 (Demultiplexing)和事件分发 (Dispatching)。它通过一个或多个线程(在 Tokio 中通常是集成在工作线程中的)来监听大量的 I/O 资源(如文件描述符)。当这些资源的状态发生变化(例如,套接字上有数据可读),操作系统会通知 Reactor。Reactor 随后将这个事件分发给预先注册了对该事件感兴趣的应用程序回调(在 Tokio 中,这个"回调"就是 Waker)。
这种模式避免了为每个 I/O 操作创建一个线程(Thread-per-Connection)的巨大开销,使得单个线程可以高效地管理成千上万个并发连接。
Tokio I/O 驱动的内部实现
在 Tokio 的源码中,I/O 驱动的核心逻辑位于 tokio::runtime::driver 模块。其工作流程可以分解为以下几个关键步骤:
1. 注册(Registration) :
当一个异步 I/O 操作(如 TcpStream::read)首次被调用且数据未就绪时,Tokio 会创建一个 Registration 对象。这个对象将当前的 Waker 与底层的文件描述符(fd)关联起来,并通过 Driver::register 方法将其注册到全局的 I/O 驱动中。
2. 等待(Polling) :
I/O 驱动在一个事件循环中不断调用操作系统的多路复用 API(如 Linux 的 epoll_wait)。这个调用会阻塞,直到有至少一个被监听的 fd 变成就绪状态,或者超时。
3. 分发(Dispatching) :
当 epoll_wait 返回时,它会提供一个就绪事件列表。Tokio 驱动遍历这个列表,对于每个就绪的 fd,它会查找所有与之关联的 Waker,并调用它们的 wake() 方法。
4. 唤醒与重试(Waking & Retrying) :
Waker::wake() 的调用会将对应的任务重新放入调度器的就绪队列。当下次该任务被调度执行时,它会再次尝试 read 操作,此时数据已经就绪,操作可以立即完成。
让我们通过一个简化的概念性代码片段来理解这个过程:
javascript
// 概念性伪代码:展示 I/O 驱动的核心循环
struct IoDriver {
// 在 Linux 上,这是一个封装了 epoll_fd 的结构
poller: Poller,
// 从文件描述符 (fd) 到 Waker 列表的映射
waker_map: HashMap<RawFd, Vec<Waker>>,
}
impl IoDriver {
async fn run(&mut self) {
loop {
// 1. 等待 I/O 事件
let events = self.poller.wait().await; // 底层调用 epoll_wait
// 2. 分发事件
for event in events {
let fd = event.fd();
if let Some(wakers) = self.waker_map.get_mut(&fd) {
// 3. 唤醒所有等待此 fd 的任务
for waker in wakers.drain(..) {
waker.wake(); // 这会将任务推入调度队列
}
}
}
}
}
// 供异步 I/O 类型(如 TcpStream)调用
fn register(&mut self, fd: RawFd, waker: Waker) {
self.waker_map.entry(fd).or_default().push(waker);
self.poller.add_interest(fd, Interest::READABLE); // 告诉 epoll 监听可读事件
}
}与调度器的协同工作
值得注意的是,在 Tokio 的多线程运行时中,I/O 驱动并非运行在一个独立的线程上,而是与工作线程深度集成 。每个工作线程在自己的调度循环中,当本地和全局任务队列都为空时,会调用 park 方法。park 不仅会让线程休眠,还会临时接管 I/O 驱动的角色 ,执行一次 epoll_wait 调用。
这种设计被称为 "自驱动" (Self-driving)或 "轮询驱动" (Polling Driver)模式。它的好处是避免了额外的线程上下文切换开销,并且天然地解决了 I/O 事件与任务调度之间的同步问题。当 epoll_wait 返回时,该工作线程会立即处理就绪的 I/O 事件(唤醒任务),然后继续执行调度循环。这种紧密的耦合是 Tokio 能够实现极致性能的关键之一。
通过这种精巧的设计,Tokio 将复杂的异步 I/O 操作对用户完全透明化。开发者只需编写直观的 async/await 代码,Tokio 的 I/O 驱动就在底层默默高效地处理着海量的并发事件。
三、Tokio 核心组件源码深度拆解
理解了 Tokio 的宏观架构后,让我们潜入其源码深处,聚焦于几个最核心的内部实现:任务(Task)的表示、调度器(Scheduler)的工作循环,以及 I/O 驱动(Driver)如何与操作系统交互。
3.1 任务(Task):Future 的运行时载体
在 Tokio 中,用户提交的 Future 并不会被直接调度。它首先会被包装成一个 Task 结构体。这个 Task 是运行时调度的基本单位,它不仅包含了 Future 本身,还携带了运行时所需的关键元数据。
一个简化的 Task 结构可能包含以下字段:
- Header : 一个头部,包含了任务的状态(就绪、等待、已完成)、指向调度器的指针、以及用于实现
Waker的关键信息。 - Future : 用户提供的
Future。 - Id: 任务的唯一标识符,用于调试和追踪。
- JoinHandle : 一个用于等待任务结果的句柄,它内部通过一个
oneshot通道与任务关联。
当 tokio::spawn 被调用时,Task::new 会创建这个结构体。最关键的是 Header 的初始化,它会将一个指向该 Task 的指针编码到 Waker 的 data 字段中。这样,当 I/O 驱动需要唤醒一个任务时,它只需调用 Waker::wake,Tokio 的 Waker 实现就能从 data 中解码出 Task 指针,并将其推入调度队列。
javascript
// 概念性伪代码,展示 Task 与 Waker 的关系
struct Task {
header: TaskHeader,
future: Pin<Box<dyn Future<Output = ()> + Send>>,
}
impl Task {
fn wake_by_ref(&self) {
// 将自己放入调度器的就绪队列
self.header.scheduler.schedule(self);
}
}
// Tokio 的 Waker 实现会调用类似下面的函数
unsafe fn raw_waker_vtable_wake(data: *const ()) {
let task: &Task = &*(data as *const Task);
task.wake_by_ref();
}这种设计将 Waker 的唤醒操作与具体的调度逻辑解耦,使得整个系统高度模块化且高效。
3.2 调度器(Scheduler):工作窃取的实现细节
Tokio 的多线程调度器 MultiThread 是其高性能的核心。每个工作线程都运行在一个名为 run 的主循环中。这个循环不断尝试从三个地方获取任务来执行:
- 本地队列(Local Queue):优先执行自己队列里的任务,这是最快的路径。
- 全局队列(Global/Shared Queue):如果本地队列为空,则尝试从全局队列中获取一批任务。
- 窃取 (Steal):如果前两者都为空,则随机选择另一个工作线程,并尝试从其本地队列的末尾窃取一半的任务。
这种"从末尾窃取"的策略是工作窃取算法的关键。因为本地队列通常以 LIFO(后进先出)方式工作,新生成的任务会被放在队列头部,而较老的任务在末尾。窃取末尾的任务意味着窃取的是那些可能依赖关系较少、更容易独立执行的"老"任务,从而减少了跨线程的数据竞争。
源码中,Worker::run 函数清晰地体现了这一逻辑:
javascript
// 概念性伪代码,展示调度循环
async fn run(&mut self) {
loop {
// 1. 首先尝试从本地队列获取任务
if let Some(task) = self.local_queue.pop() {
self.run_task(task).await;
continue;
}
// 2. 尝试从全局队列获取一批任务
if let Some(tasks) = self.shared_queue.pop_batch() {
self.local_queue.push_batch(tasks);
continue;
}
// 3. 尝试从其他工作线程窃取任务
if let Some(stolen_task) = self.steal_from_other_worker() {
self.run_task(stolen_task).await;
continue;
}
// 4. 如果所有队列都空了,进入休眠,等待 I/O 事件唤醒
self.park().await;
}
}park() 是一个关键操作,它会让当前线程进入休眠状态,直到有新的任务被提交或者 I/O 事件发生。这避免了在空闲时消耗 CPU 资源。
3.3 I/O 驱动(Driver):从 epoll 到 Waker 的桥梁
Tokio 的 I/O 驱动是其与操作系统内核沟通的桥梁。在 Linux 上,它基于 epoll。驱动的核心是一个事件循环,它不断地调用 epoll_wait 来等待 I/O 事件。
当用户代码(例如 TcpStream::read)发现数据未就绪时,它会调用 Driver::register 方法,将当前套接字的文件描述符(fd)和一个 Waker 注册到驱动中。驱动内部会维护一个从 fd 到 Waker 列表的映射。
当 epoll_wait 返回一个就绪的 fd 时,驱动会查找该 fd 对应的所有 Waker,并依次调用它们的 wake() 方法。如前所述,wake() 最终会将对应的任务推入调度器的就绪队列。
这个过程的关键在于注册 (Registration)和兴趣 (Interest)的管理。Tokio 使用了一个名为 Registration 的结构来高效地管理这些状态,确保在 Future 被 Drop 时能正确地从驱动中注销,防止 Waker 被错误地唤醒。
通过以上三个层面的拆解,我们可以看到 Tokio 的设计是环环相扣、高度优化的。Task 是调度的单元,Scheduler 是调度的引擎,而 Driver 则是连接异步世界与操作系统同步事件的纽带。三者协同工作,共同构成了 Rust 异步编程的强大基石。
四、Tokio 与其他运行时的对比
在我深入学习 Tokio 的过程中,不可避免地会接触到 Rust 生态中的其他异步运行时,主要是 async-std 和 smol。对它们进行横向对比,不仅有助于我们理解 Tokio 的设计哲学,也能帮助我们在不同场景下做出更合适的技术选型。
4.1 设计哲学的差异
这三者的设计目标从一开始就有所不同。
- Tokio 的目标非常明确:成为生产级、高性能 的异步运行时。为此,它不惜在 API 设计上做出一些"不那么标准库"的选择,以换取极致的性能和功能完整性。它更像是一个"全栈式"的解决方案,提供了从底层 I/O 到高层网络协议(如
tokio-util)的一整套工具。 - async-std 则采取了"拥抱标准库 "的策略。它的 API 设计几乎完全模仿了
std中的同步 API(如std::fs::Filevsasync_std::fs::File)。这种设计极大地降低了开发者的学习成本,对于希望快速将同步代码迁移到异步世界的项目非常友好。然而,这种对 API 一致性的追求,在早期版本中曾带来一些性能上的妥协。 - smol 走的是"极简主义 "路线。它的核心理念是"小而美",只提供最基础的调度器和 I/O 驱动(它复用了
async-io库),将更多选择权交给用户。smol本身更像是一个构建块(building block),许多上层库(包括一些async-std的组件)都可以在其上运行。这种设计使其编译速度极快,非常适合资源受限的环境或作为库的底层依赖。
4.2 技术实现与生态
从技术实现上看,Tokio 和 async-std 都采用了多线程工作窃取调度器,但在 I/O 驱动上有显著区别。Tokio 拥有自研的、高度优化的 I/O 驱动,而 async-std 和 smol 则共享同一个名为 async-io 的驱动库。这意味着在纯粹的 I/O 密集型场景下,Tokio 往往能展现出更好的性能。
更重要的是生态系统 的差距。Tokio 凭借其先发优势和强大的社区支持,已经构建了一个庞大且成熟的生态系统。几乎所有主流的 Rust 异步网络库,如 Web 框架 Axum/Hyper、gRPC 库 Tonic、数据库驱动 sqlx 等,都原生基于 Tokio。这种"赢家通吃"的效应使得选择 Tokio 意味着拥有了最丰富的工具和最活跃的社区支持。
4.3 对比总结
下表总结了三者的关键差异:
|------------|---------------------------------|----------------------|-------------------|
| 特性/运行时 | Tokio | async-std | smol |
| 设计理念 | 高性能、功能全面、生产级 | 与标准库 API 高度兼容 | 极致小巧、模块化 |
| 调度器 | 多线程工作窃取 | 多线程工作窃取 | 单线程或简单线程池 |
| I/O 驱动 | 自研,高度优化 | 基于 async-io | 基于 async-io |
| 生态系统 | 极其庞大 (Hyper, Axum, Tonic 等) | 较小 | 作为构建块,生态依赖其上层 |
| 适用场景 | 高并发网络服务、生产环境 | 希望 API 与 std 一致的项目 | 嵌入式、资源受限环境、作为库的依赖 |
"大浪淘沙,留下的才是金子,随着时间的流逝,Tokio 越来越亮眼,无论是性能、功能" 。这句话精准地概括了当前 Rust 异步生态的现状。对于绝大多数需要构建高性能、高可靠服务的开发者而言,Tokio 已成为不二之选。
五、总结
Rust 的异步编程模型通过 Future 和 Waker 提供了强大的底层抽象,而 Tokio 则在此之上构建了一个高效、可靠的运行时。通过深入其源码,我们了解到其核心在于多线程工作窃取调度器 与基于 Reactor 模式的 I/O 驱动的精妙结合。
掌握这些底层逻辑,不仅能帮助我们写出更高效的代码,更能让我们在面对复杂问题时,做出更明智的技术选型。例如,理解 spawn_blocking 的作用可以避免阻塞运行时;理解任务调度模型有助于优化任务的粒度。
"不要过早优化,但要避免过早劣化。 " 在异步编程中,这意味着要避免在异步上下文中执行阻塞操作,合理使用 spawn 和 spawn_blocking,并充分利用 Tokio 提供的同步原语(如 Mutex, Semaphore)来管理共享状态。
总而言之,Tokio 不仅仅是一个库,它是 Rust 异步生态的基石。深入理解它,是每一位希望在 Rust 领域构建高性能应用的开发者必经之路。
参考链接
关键词标签
#Rust #Tokio #异步编程 #源码分析 #系统编程