红黑树
- 一.初识红黑树
-
- 1.红黑树的概念
- 2.红黑树的核心规则
- 3.说明
- 4.红黑树的效率分析
- 二.红黑树的简单模拟实现
-
- 1.红黑树节点结构
-
- 代码解释
- 2.红黑树的插入
-
- (1)空树处理
- (2)二叉搜索树插入逻辑
- (3)插入后平衡调整(核心)
-
- 场景1:父节点是祖父节点的左孩子(`grandfather->_left == parent`)
-
- 子场景1.1:叔叔存在且为红色(`uncle && uncle->_col == RED`)
- 子场景1.2:叔叔不存在或为黑色(`!uncle || uncle->_col == BLACK`)
- 场景2:父节点是祖父节点的右孩子(`grandfather->_right == parent`)
- (4)最终保证根节点为黑色
- 总结
- 2.红黑树的查找
-
- 2.1 功能
- 2.2 实现逻辑
- 3.检查红黑树是否平衡
-
- 3.1 功能
- 3.2 实现逻辑
-
- 红黑树的基础操作封装(节点总数、高度与中序遍历)
-
- 4.1 功能
- 4.2 实现逻辑
- 5.红黑树的递归工具函数(节点总数与高度计算)
-
- 5.1 函数功能与实现
- 6.测试代码
-
- 测试说明:
- 预期结果:
一.初识红黑树
1.红黑树的概念
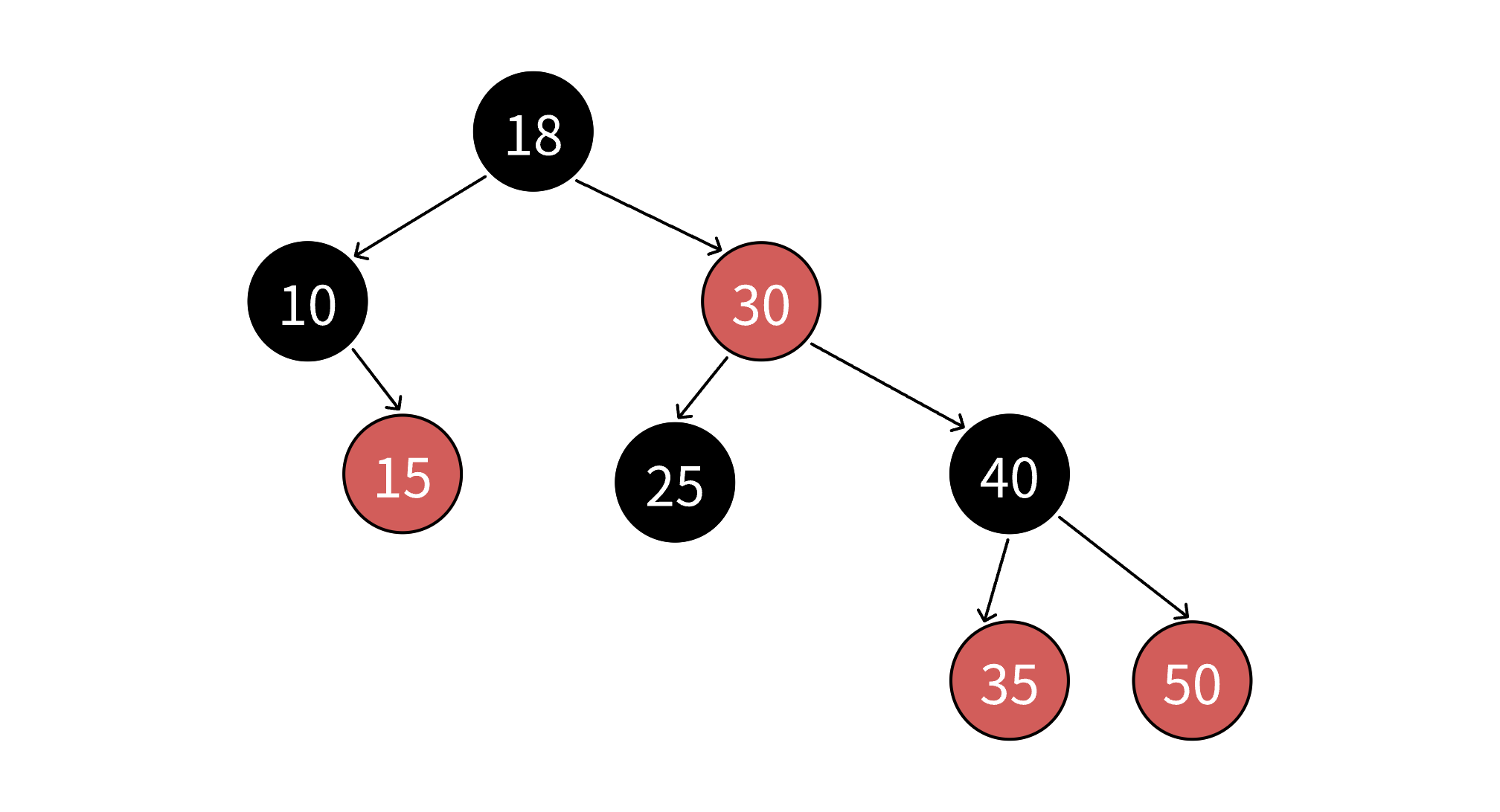
红黑树是一种自平衡的二叉搜索树,其每个结点除了存储数据外,还增加一个额外的存储位表示颜色(红色或黑色)。通过对结点颜色的约束,红黑树能保证从根到任意叶子的路径长度差不超过两倍,从而维持近似平衡的状态,避免二叉搜索树在极端情况下退化为链表(如有序插入时),确保增删查改操作的时间复杂度稳定在O(log n)。
2.红黑树的核心规则
红黑树的平衡通过以下5条规则严格约束(整合经典定义,明确空结点处理):
- 颜色约束:每个结点要么是红色,要么是黑色。
- 根结点特性:根结点必须是黑色。
- 红结点子结点约束:若一个结点是红色,则其两个子结点必须是黑色(即不存在连续的红色结点)。
- 黑路径平衡 :从任意结点到其所有空子孙结点(NIL结点) 的每条简单路径上,包含的黑色结点数量相同(称为"黑高"相等)。
- 空结点颜色:所有空结点(NIL,即叶子的子结点,非传统意义上的叶子)均视为黑色。
3.说明
- 规则5中提到的"NIL结点"是逻辑上的空结点(可理解为"哨兵结点"),目的是统一路径的终点判定,简化规则4的验证(确保每条路径的黑结点计数起点和终点一致)。实际实现中,有时会省略显式的NIL结点,仅通过逻辑判断处理,但规则的约束本质不变。
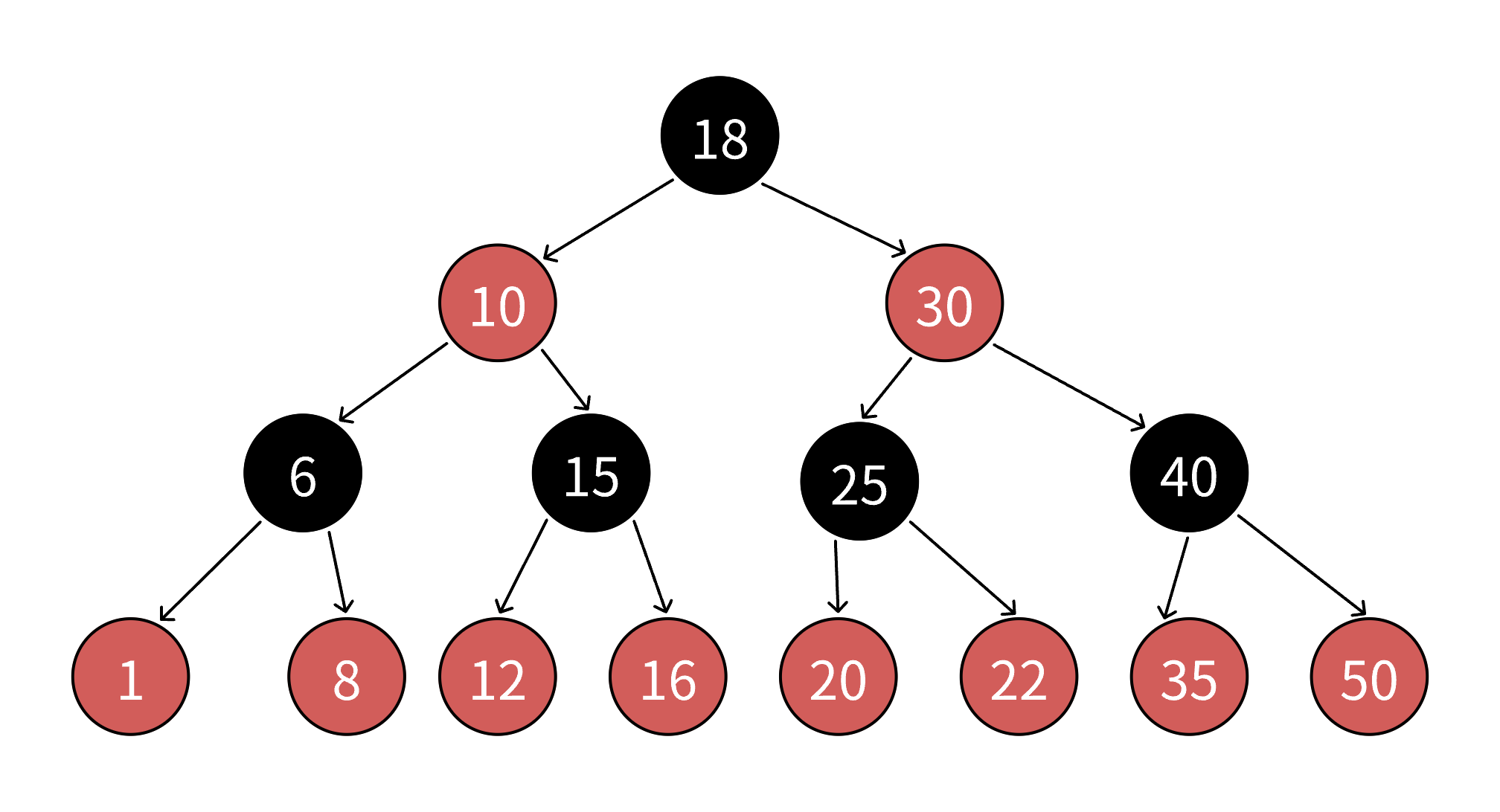
- 这些规则共同保证了红黑树的"近似平衡":最长路径(红黑交替)不会超过最短路径(全黑)的2倍,从而维持高效的操作性能。
4.红黑树的效率分析
红黑树的核心优势在于通过颜色约束实现近似平衡,从而保证操作的高效性。假设树中节点总数为 ( N ),最短路径(全黑节点构成)的长度为 ( h )(即黑高),可推导出以下关系:
- 最短路径(全黑节点)的节点数为 ( h ),对应节点总数下限:( N \geq 2^h - 1 )(满二叉树情形)。
- 最长路径(红黑交替)的节点数不超过 ( 2h )(红色节点最多与黑色节点数量相等),对应节点总数上限:( N < 2^{2h} - 1 )。
由此可推得 ( h \approx \log_2 N ),因此最长路径长度不超过 ( 2\log_2 N )。这意味着红黑树中任意操作(增、删、查、改)的最坏时间复杂度均为 ( O(\log N) ),与完全平衡的二叉树效率同级。
二.红黑树的简单模拟实现
1.红黑树节点结构
cpp
#pragma once
#include<iostream>
using namespace std;
// 节点颜色枚举:红色/黑色
enum Color {
RED,
BLACK
};
// 红黑树节点模板结构
template<typename K,typename V>
struct RBTreeNode {
pair<K, V> _kv; // 存储键值对
RBTreeNode <K, V>* _left; // 左子节点指针
RBTreeNode <K, V>* _right; // 右子节点指针
RBTreeNode <K, V>* _parent; // 父节点指针(红黑树调整需父子关系)
Color _col; // 节点颜色
// 构造函数:初始化键值对,子节点及父节点指针默认为空
RBTreeNode(const pair<K, V>& kv)
:_kv(kv)
,_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
{}
};代码解释
- 颜色枚举 :定义了
Color枚举类型,包含RED(红色)和BLACK(黑色)两种颜色,用于标识红黑树节点的颜色。 - 红黑树节点模板结构(
RBTreeNode) :- 成员变量:包含存储键值对的
_kv(类型为pair<K, V>)、指向左子节点的_left、指向右子节点的_right、指向父节点的_parent,以及表示节点颜色的_col。 - 构造函数:接收一个
pair<K, V>类型的引用参数,初始化_kv,并将_left、_right、_parent初始化为nullptr。
- 成员变量:包含存储键值对的
2.红黑树的插入
cpp
template<typename K, typename V>
class RBTree{
typedef RBTreeNode<K, V> Node;
public:
bool Insert(const pair<K, V>& kv)
{
if (!_root)//AVL树为空树的情况
{
_root = new Node(kv);
_root->_col = BLACK;
return true;
}
Node* cur = _root;
Node* parent = nullptr;
while (cur)
{
if (cur->_kv.first > kv.first)
{
parent = cur;
cur = cur->_left;
}
else if (cur->_kv.first < kv.first)
{
parent = cur;
cur = cur->_right;
}
else return false;
}
//走到空位置
cur = new Node(kv);
if (parent->_kv.first > kv.first) parent->_left = cur;
else if (parent->_kv.first < kv.first) parent->_right = cur;
cur->_parent = parent;
//分情况进行插入调整,变色或旋转
while (parent && parent->_col == RED)
{
Node* grandfather = parent->_parent; // 获取祖父节点(必存在,否则父红违反规则)
// 父节点是祖父的左孩子
if (grandfather->_left == parent)
{
Node* uncle = grandfather->_right; // 叔叔节点(祖父的右孩子)
// 叔叔存在且为红色(变色处理)
if (uncle && uncle->_col == RED)
{
parent->_col = uncle->_col = BLACK; // 父、叔变黑色
grandfather->_col = RED; // 祖父变红色
cur = grandfather; // 继续向上检查
parent = cur->_parent;
}
// 叔叔不存在或为黑色(旋转处理)
else
{
// 当前节点是父节点的左孩子(右单旋)
if (cur == parent->_left)
{
RotateRight(grandfather); // 以祖父为轴右旋
parent->_col = BLACK; // 父节点变黑
grandfather->_col = RED; // 原祖父变红
}
// 当前节点是父节点的右孩子(左右双旋)
else
{
RotateLeftRight(grandfather); // 以祖父为轴左右双旋
cur->_col = BLACK; // 当前节点变黑
grandfather->_col = RED; // 原祖父变红
}
break; // 旋转后已平衡,退出循环
}
if (grandfather->_right == parent) // 父节点是祖父节点的右孩子
{
Node* uncle = grandfather->_left; // 叔叔节点为祖父节点的左孩子
if (uncle && uncle->_col) // 叔叔节点存在且为红色
{
parent->_col = uncle->_col = BLACK; // 父和叔叔设为黑色
grandfather->_col = RED; // 祖父设为红色
cur = grandfather; // 继续向上调整
parent = cur->_parent;
}
else // 叔叔节点不存在或为黑色
{
if (cur == parent->_right) // 当前节点是父节点的右孩子(右右情况)
{
RotateLeft(grandfather); // 左旋转祖父节点
parent->_col = BLACK; // 父节点设为黑色
grandfather->_col = RED; // 原祖父节点设为红色
}
else // 当前节点是父节点的左孩子(右左情况)
{
RotateRightLeft(grandfather); // 先右旋转父节点,再左旋转祖父节点
cur->_col = BLACK; // 当前节点设为黑色
grandfather->_col = RED; // 原祖父节点设为红色
}
break; // 调整完成,退出循环
}
}
}
}
_root->_col = BLACK;
return true;
}template<typename K, typename V> class RBTree:红黑树类模板,键类型为K,值类型为V。typedef RBTreeNode<K, V> Node:简化节点类型名,Node即红黑树节点结构(包含键值对、左右子节点、父节点指针及颜色)。
(1)空树处理
- 若树为空(
_root为nullptr),直接创建新节点作为根,并将根节点颜色设为黑色(符合红黑树规则2:根为黑色)。
(2)二叉搜索树插入逻辑
- 非空树时,先通过二叉搜索树规则查找插入位置:
从根节点_root出发,用cur遍历,parent记录cur的父节点。- 若
cur->_kv.first > kv.first:向左子树查找; - 若
cur->_kv.first < kv.first:向右子树查找; - 若相等:插入失败(键值唯一)。
- 若
- 找到空位置后,创建新节点
cur,根据键值大小设为parent的左/右孩子,并绑定parent指针(新节点默认颜色为红色,代码未显式写但红黑树插入新节点通常为红色,因红色对平衡影响更小)。
(3)插入后平衡调整(核心)
新节点为红色,若其父节点parent为黑色,无需调整(不违反规则);若parent为红色(违反规则3:连续红色节点),则需进入循环调整,直到不违反规则。
循环条件:parent && parent->_col == RED(父节点存在且为红色,需调整)。
调整逻辑分两大场景(父节点是祖父节点的左/右孩子,对称处理):
场景1:父节点是祖父节点的左孩子(grandfather->_left == parent)
- 祖父节点
grandfather:必存在且为黑色(因父节点为红色,若祖父为红则违反规则3,故祖父一定是黑)。 - 叔叔节点
uncle:祖父的右孩子(与父节点对称)。
子场景1.1:叔叔存在且为红色(uncle && uncle->_col == RED)
- 调整方式:变色 。
- 父节点
parent和叔叔uncle改为黑色; - 祖父节点
grandfather改为红色(维持黑高平衡:原祖父为黑,父和叔为红,变色后黑节点数量不变)。
- 父节点
- 继续向上检查:将
cur更新为祖父,parent更新为祖父的父节点,重复循环(因祖父变红色后,可能与曾祖父形成连续红色)。
子场景1.2:叔叔不存在或为黑色(!uncle || uncle->_col == BLACK)
-
调整方式:旋转+变色(因叔叔无法通过变色分担红色,需旋转重构树结构)。
-
子场景1.2.1:
cur是父节点的左孩子(左左结构):执行右旋转 (以祖父为轴),旋转后父节点成为新的子树根;
父节点改为黑色,原祖父改为红色(消除连续红色,维持黑高)。
-
子场景1.2.2:
cur是父节点的右孩子(左右结构):执行左右双旋 (先左旋父节点,再右旋祖父),旋转后
cur成为新的子树根;
cur改为黑色,原祖父改为红色(消除连续红色,维持黑高)。 -
旋转后局部已平衡,
break退出循环。
-
场景2:父节点是祖父节点的右孩子(grandfather->_right == parent)
- 逻辑与场景1对称,区别在于:
- 叔叔节点
uncle是祖父的左孩子; - 旋转方向相反(左旋转、右左双旋),变色规则一致。
- 叔叔节点
(4)最终保证根节点为黑色
无论调整过程如何,最后强制将根节点设为黑色(确保符合规则2)。
总结
该函数通过"二叉搜索树插入+红黑规则校验+变色/旋转调整",实现了红黑树的插入操作,确保插入后仍满足红黑树的5条规则,维持近似平衡,保证操作效率为O(log n)。
2.红黑树的查找
注:红黑树的查找和AVL树,二叉平衡搜索树的查找一致
cpp
// 查找键对应节点,返回节点指针(未找到返回nullptr)
Node* Find(const K& key)
{
Node* cur = _root;
while (cur)
{
if (cur->_kv.first > key) // 键值小于当前节点,向左查找
{
cur = cur->_left;
}
else if (cur->_kv.first < key) // 键值大于当前节点,向右查找
{
cur = cur->_right;
}
else // 找到目标节点
{
return cur;
}
}
return nullptr; // 未找到
}2.1 功能
该函数用于在红黑树中查找指定键key对应的节点,属于红黑树的核心查询操作。
2.2 实现逻辑
- 初始化
cur指针指向根节点_root。 - 循环遍历树结构:
- 若当前节点
cur的键值大于目标key,则向左子树查找(cur = cur->_left); - 若当前节点
cur的键值小于目标key,则向右子树查找(cur = cur->_right); - 若键值相等,说明找到目标节点,返回
cur;
- 若当前节点
- 若循环结束仍未找到,返回
nullptr。
3.检查红黑树是否平衡
cpp
// 检查平衡树
bool IsBalanceTree() {
if (!_root) return true; // 空树默认平衡
// 根节点必须为黑色
if (_root->_col == RED) {
cout << "根节点为红色,红黑树不平衡" << endl;
return false;
}
// 计算最左路径的黑色节点数(作为参考值)
Node* leftMost = _root;
int blackNumRef = 0;
while (leftMost) {
if (leftMost->_col == BLACK) {
blackNumRef++;
}
leftMost = leftMost->_left;
}
int blackNum = 0; // 用于递归中累计黑色节点数
return Check(_root, blackNum, blackNumRef);
}3.1 功能
用于检查红黑树是否满足所有红黑树规则,确保树的平衡状态。
3.2 实现逻辑
- 空树处理 :若树为空(
_root为nullptr),默认返回平衡(true)。 - 根节点颜色检查:红黑树规则要求根节点必须为黑色,若根节点为红色,直接判定不平衡并输出提示。
- 基准黑节点数计算 :遍历最左路径,统计黑色节点数量(
blackNumRef),作为后续路径黑节点数的参考值。 - 递归检查 :调用
Check函数(代码中未完全展示,推测用于递归验证所有路径的黑节点数是否与blackNumRef一致,同时检查红节点的子节点是否为黑色等规则)。
4. 红黑树的基础操作封装(节点总数、高度与中序遍历)
cpp
// 获取树的节点总数
int Size(){return _Size(_root);}
// 获取树的高度
int Height(){return _Height(_root);}
// 中序遍历(按键值升序输出)
void InOrder()
{
_InOrder(_root);
cout << endl;
}
private:
Node* _root = nullptr; // 根节点指针
// 右旋转(解决左左失衡)
void RotateRight(Node* parent)
{
Node* subL = parent->_left; // 左子树的根节点
Node* subLR = subL->_right; // 左子树的右子树
Node* parentParent = parent->_parent; // 失衡节点的父节点
// 1. 调整parent与subLR的关系
parent->_left = subLR;
if (subLR) // 若subLR存在,更新其父指针
{
subLR->_parent = parent;
}
// 2. 调整subL与parent的关系
subL->_right = parent;
parent->_parent = subL;
// 3. 调整subL与原parent父节点的关系
if (parentParent) // 若parent不是根节点
{
if (parentParent->_left == parent) // parent是左孩子
{
parentParent->_left = subL;
}
else // parent是右孩子
{
parentParent->_right = subL;
}
subL->_parent = parentParent;
}
else // parent是根节点,更新根指针
{
_root = subL;
subL->_parent = nullptr;
}
}
// 左旋转(解决右右失衡)
void RotateLeft(Node* parent)
{
Node* subR = parent->_right; // 右子树的根节点
Node* subRL = subR->_left; // 右子树的左子树
Node* parentParent = parent->_parent; // 失衡节点的父节点
// 1. 调整parent与subRL的关系
parent->_right = subRL;
if (subRL) // 若subRL存在,更新其父指针
{
subRL->_parent = parent;
}
// 2. 调整subR与parent的关系
subR->_left = parent;
parent->_parent = subR;
// 3. 调整subR与原parent父节点的关系
if (parentParent) // 若parent不是根节点
{
if (parentParent->_left == parent) // parent是左孩子
{
parentParent->_left = subR;
}
else // parent是右孩子
{
parentParent->_right = subR;
}
subR->_parent = parentParent;
}
else // parent是根节点,更新根指针
{
_root = subR;
subR->_parent = nullptr;
}
}
// 左右旋转(先左旋左子树,再右旋失衡节点,解决左右失衡)
void RotateLeftRight(Node* parent)
{
Node* subL = parent->_left; // 左子树的根节点
Node* subLR = subL->_right; // 左子树的右子树(失衡的关键节点)
// 1. 先对左子树subL进行左旋
RotateLeft(subL);
// 2. 再对失衡节点parent进行右旋
RotateRight(parent);
}
// 右左旋转(先右旋右子树,再左旋失衡节点,解决右左失衡)
void RotateRightLeft(Node* parent)
{
Node* subR = parent->_right; // 右子树的根节点
Node* subRL = subR->_left; // 右子树的左子树(失衡的关键节点)
// 1. 先对右子树subR进行右旋
RotateRight(subR);
// 2. 再对失衡节点parent进行左旋
RotateLeft(parent);
}注:这里的四个"旋转"详细情况请看《C++:AVL树》,在这里不做过多赘述。
cpp
// 递归校验红黑树的平衡性(核心辅助函数)
// 参数说明:
// cur:当前遍历的节点
// blackNum:引用参数,累计从根节点到当前路径的黑色节点数量
// blackNumRef:参考值,即最左路径的黑色节点总数(用于校验所有路径黑色节点数是否相等)
// 返回值:true表示当前子树平衡,false表示不平衡
bool Check(Node* cur, int& blackNum, const int blackNumRef) {
// 1. 处理空节点(红黑树中,空节点视为黑色叶子节点)
if (!cur) {
// 校验:当前路径的黑色节点数必须与参考值相等
if (blackNum != blackNumRef) {
cout << "路径黑色节点数量不相等,红黑树不平衡" << endl;
return false;
}
return true; // 空路径符合规则
}
// 2. 累计当前路径的黑色节点数(仅黑色节点计数)
if (cur->_col == BLACK) {
blackNum++; // 每遇到一个黑色节点,计数器+1
}
// 3. 校验红黑树核心规则:红色节点的父节点不能是红色(避免连续红节点)
if (cur->_col == RED) {
Node* parent = cur->_parent; // 获取父节点
// 父节点存在且父节点为红色 → 违反规则
if (parent && parent->_col == RED) {
cout << "节点 " << cur->_kv.first << " 存在连续红色父节点,红黑树不平衡" << endl;
return false;
}
}
// 4. 递归校验左子树和右子树
// 先校验左子树,若左子树不平衡则直接返回false
// 左子树平衡后,再校验右子树,确保两侧都符合规则
return Check(cur->_left, blackNum, blackNumRef) && Check(cur->_right, blackNum, blackNumRef);
}4.1 功能
用于递归验证红黑树是否满足所有平衡规则,是红黑树完整性校验的核心逻辑。
4.2 实现逻辑
- 参数说明 :
cur为当前遍历节点,blackNum为当前路径的黑色节点计数(引用传递),blackNumRef为参考黑色节点数(最左路径的黑节点数)。 - 空节点处理 :若
cur为空,检查当前路径黑节点数是否与blackNumRef相等,相等则符合规则,否则不平衡。 - 黑色节点计数 :若当前节点为黑色,
blackNum加1。 - 连续红节点检查:若当前节点为红色,检查其父节点是否也为红色,若是则存在连续红节点,树不平衡。
- 递归遍历:分别递归检查左子树和右子树,只有左右子树都满足规则时,树才平衡。
5.红黑树的递归工具函数(节点总数与高度计算)
cpp
// 计算节点总数的递归实现
int _Size(Node* root)
{
return !root ? 0 : _Size(root->_left) + _Size(root->_right) + 1;
}
// 计算树高度的递归实现
int _Height(Node* root)
{
if (!root){return 0; }// 空树高度为0
int leftHeight = _Height(root->_left); // 左子树高度
int rightHeight = _Height(root->_right); // 右子树高度
return max(leftHeight, rightHeight) + 1; // 当前节点高度 = 左右子树最大高度 + 1
}5.1 函数功能与实现
-
_Size函数:- 功能:计算红黑树的节点总数。
- 实现逻辑:采用递归方式,若当前节点
root为空,返回0;否则返回左子树节点数(_Size(root->_left))与右子树节点数(_Size(root->_right))之和加1(当前节点)。
-
_Height函数:- 功能:计算红黑树的高度。
- 实现逻辑:递归遍历,空树高度为0;否则当前节点高度为左子树高度(
leftHeight)和右子树高度(rightHeight)的最大值加1。
cpp
// 中序遍历递归实现
void _InOrder(Node* root)
{
if (!root)return;
_InOrder(root->_left); // 遍历左子树
cout << root->_kv.first << ":" << root->_kv.second << endl; // 访问当前节点
_InOrder(root->_right); // 遍历右子树
}
};中序遍历的代码已在《C++:二叉平衡搜索树》《C++:AVL树》中出现,不在此赘述
6.测试代码
cpp
#include <iostream>
#include <vector>
using namespace std;
// 引入红黑树定义(此处需包含上述红黑树完整代码)
// ...(上述红黑树的类和结构体定义)
int main() {
// 测试1:基本插入与中序遍历(验证二叉搜索树特性)
RBTree<int, int> rbt;
vector<pair<int, int>> testData = {
{10, 100}, {20, 200}, {5, 50}, {15, 150},
{30, 300}, {40, 400}, {50, 500}, {35, 350}
};
cout << "=== 插入测试数据 ===" << endl;
for (auto& kv : testData) {
bool ret = rbt.Insert(kv);
cout << "插入 " << kv.first << ":" << (ret ? "成功" : "失败(重复键)") << endl;
}
// 测试2:中序遍历(应按键升序输出,验证二叉搜索树有序性)
cout << "\n=== 中序遍历结果(升序) ===" << endl;
rbt.InOrder();
// 测试3:查找功能
cout << "\n=== 查找测试 ===" << endl;
vector<int> findKeys = {15, 30, 100};
for (int key : findKeys) {
auto node = rbt.Find(key);
if (node) {
cout << "找到键 " << key << ",值为 " << node->_kv.second << endl;
} else {
cout << "未找到键 " << key << endl;
}
}
// 测试4:平衡性检查(验证红黑树规则)
cout << "\n=== 平衡性检查 ===" << endl;
bool isBalanced = rbt.IsBalanceTree();
cout << "红黑树" << (isBalanced ? "符合" : "不符合") << "所有平衡规则" << endl;
// 测试5:节点总数与高度
cout << "\n=== 树结构信息 ===" << endl;
cout << "节点总数:" << rbt.Size() << endl;
cout << "树的高度:" << rbt.Height() << endl;
// 测试6:插入重复键
cout << "\n=== 插入重复键测试 ===" << endl;
bool ret = rbt.Insert({10, 1000}); // 10已存在
cout << "插入重复键10:" << (ret ? "成功(错误)" : "失败(正确)") << endl;
return 0;
}以下是针对上述红黑树实现的测试代码,用于验证插入、查找、平衡性检查等功能的正确性:
cpp
#include"RBTree.h"//已包含红黑树的模拟实现的所有代码
#include <iostream>
#include <vector>
using namespace std;
int main() {
// 测试1:基本插入与中序遍历(验证二叉搜索树特性)
RBTree<int, int> rbt;
vector<pair<int, int>> testData = {
{10, 100}, {20, 200}, {5, 50}, {15, 150},
{30, 300}, {40, 400}, {50, 500}, {35, 350}
};
cout << "=== 插入测试数据 ===" << endl;
for (auto& kv : testData) {
bool ret = rbt.Insert(kv);
cout << "插入 " << kv.first << ":" << (ret ? "成功" : "失败(重复键)") << endl;
}
// 测试2:中序遍历(应按键升序输出,验证二叉搜索树有序性)
cout << "\n=== 中序遍历结果(升序) ===" << endl;
rbt.InOrder();
// 测试3:查找功能
cout << "\n=== 查找测试 ===" << endl;
vector<int> findKeys = {15, 30, 100};
for (int key : findKeys) {
auto node = rbt.Find(key);
if (node) {
cout << "找到键 " << key << ",值为 " << node->_kv.second << endl;
} else {
cout << "未找到键 " << key << endl;
}
}
// 测试4:平衡性检查(验证红黑树规则)
cout << "\n=== 平衡性检查 ===" << endl;
bool isBalanced = rbt.IsBalanceTree();
cout << "红黑树" << (isBalanced ? "符合" : "不符合") << "所有平衡规则" << endl;
// 测试5:节点总数与高度
cout << "\n=== 树结构信息 ===" << endl;
cout << "节点总数:" << rbt.Size() << endl;
cout << "树的高度:" << rbt.Height() << endl;
// 测试6:插入重复键
cout << "\n=== 插入重复键测试 ===" << endl;
bool ret = rbt.Insert({10, 1000}); // 10已存在
cout << "插入重复键10:" << (ret ? "成功(错误)" : "失败(正确)") << endl;
return 0;
}测试说明:
- 插入功能:通过多组数据测试插入逻辑,包括重复键的处理(应插入失败)。
- 中序遍历:验证红黑树的二叉搜索树特性(中序遍历结果为键的升序)。
- 查找功能:测试存在的键和不存在的键,验证查找结果的正确性。
- 平衡性检查 :通过
IsBalanceTree函数验证插入后是否仍满足红黑树规则(根为黑、无连续红节点、各路径黑节点数相等)。 - 结构信息 :通过
Size和Height函数查看树的规模和高度,辅助验证近似平衡性(高度应接近2*log2(n))。
预期结果:
- 插入非重复键均成功,重复键失败。
- 中序遍历按键升序输出(5,10,15,20,30,35,40,50)。
- 查找存在的键(15,30)返回对应节点,查找不存在的键(100)返回空。
- 平衡性检查输出"符合所有平衡规则"。
- 节点总数为8,高度约为4~5(符合红黑树近似平衡特性)。