提到稚晖君,毫无疑问,在科技圈一直是顶流的存在。自从稚晖君从华为出来投身机器人创业以后,大佬的技术动向无时无刻不被业界所关注着。
这不,就在刚刚过去的 1024 程序员节,稚晖君动态迎来一波大更新,并且一出手又是一个王炸 ,相信不少同学也刷到了,那就是官宣:
全球首个 0 代码机器人内容创作平台:「灵创」正式发布了!
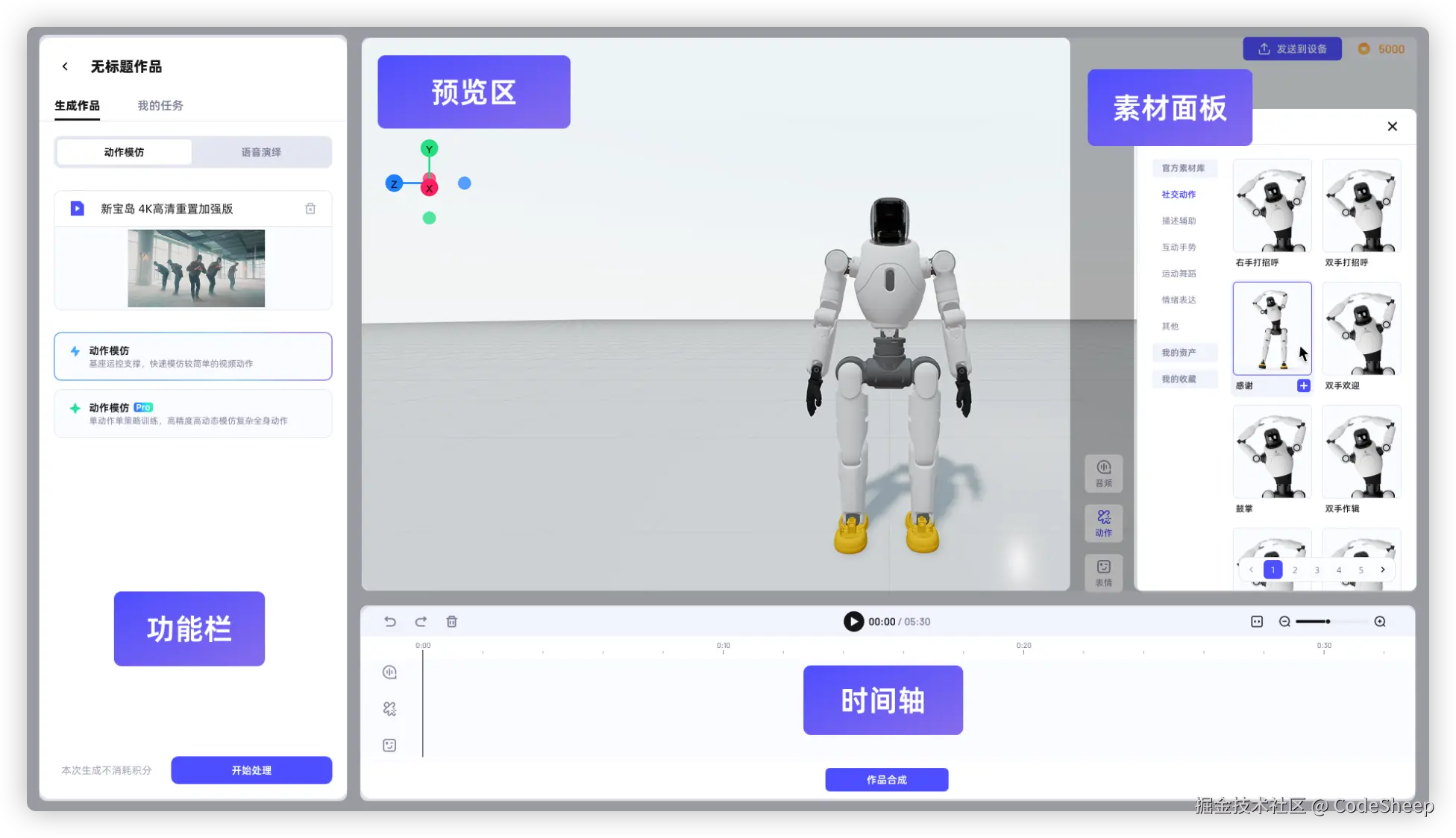
智元这次发布的灵创平台 ,是一个面向大众的机器人创作平台。
即便用户没有专业的编程、控制和动作设计背景,也能轻松完成机器人创作与发布。

要知道,以前用户想完成这件事情,是需要专业的背景、专业的设备、要懂技术、要懂编程才能做到的。
但是现在有了这个平台,就可以将传统机器人动作开发(比如:设计、控制、同步、调试)等复杂流程抽象化、可视化,让机器人创作更加直观和易用。
所以简单来概括,这平台出现的最大意义之一就是:
极大降低了机器人创作的门槛,让机器人从此不再只是少数极客的玩具了。
灵创平台核心功能
「灵创」平台包含如下四大核心功能:
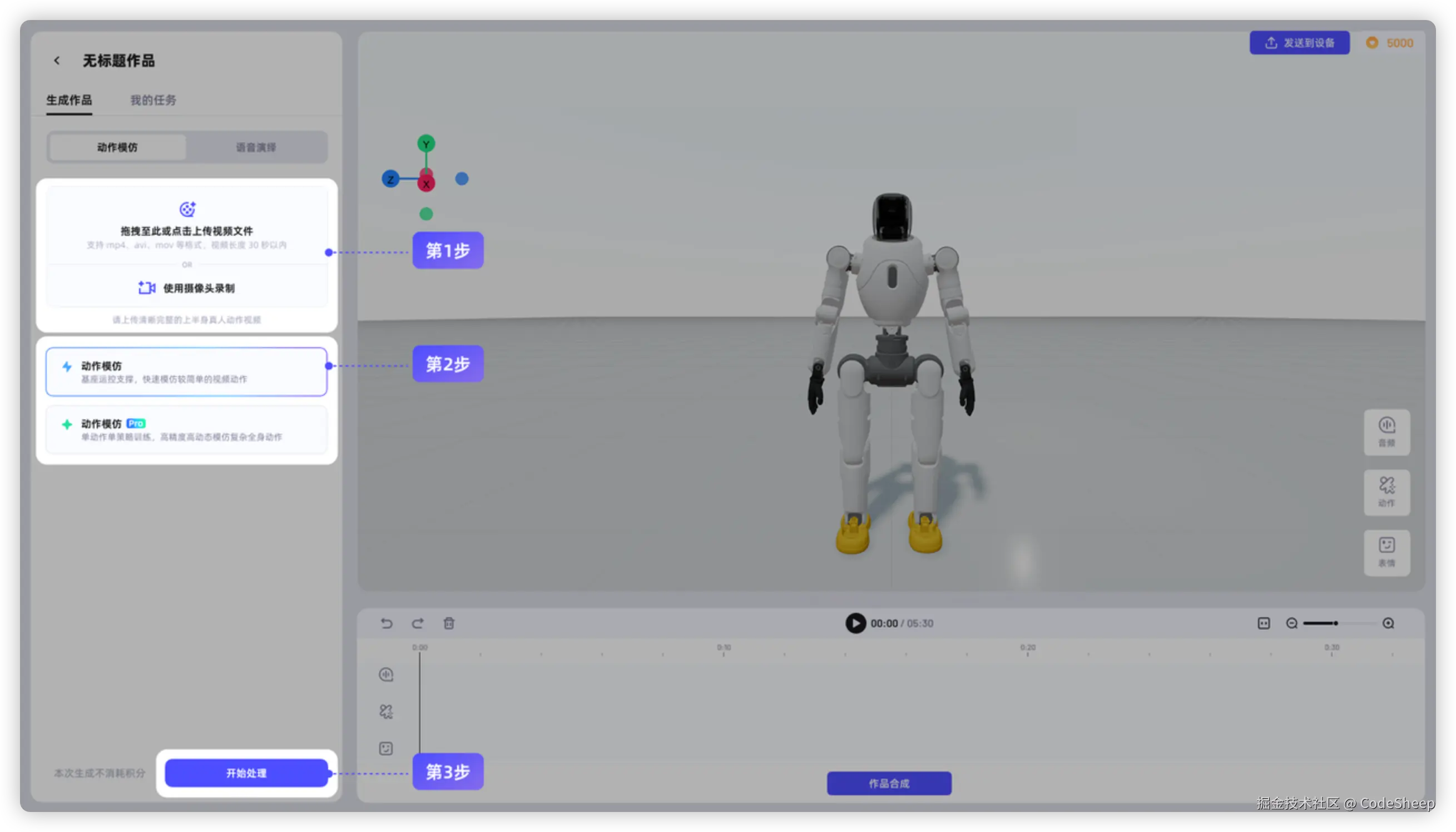
1、动作开发
有了这个功能,从现在开始,可以说每个人都能当机器人的"舞蹈老师"了。
具体如何来理解呢?
讲白了,通过这个平台,无论是舞蹈、武术、还是日常动作,用户只需要一部手机拍摄视频上传,就能让机器人学会对应动作。
要知道,这可是原先只有极少数的专业研发人员才能完成的事情,而且往往还需要昂贵的动捕设备,算法建模、强化学习训练、工程调参等专业知识。
但现在借助「灵创」平台,0代码就可以进行机器人动作开发。
2、语音演绎
借助这项功能,用户就可以实现基于语音驱动的机器人创作。
当用户上传文本内容或音频后,平台会智能识别语义,并生成与语音内容匹配的机器人肢体动作与表情。
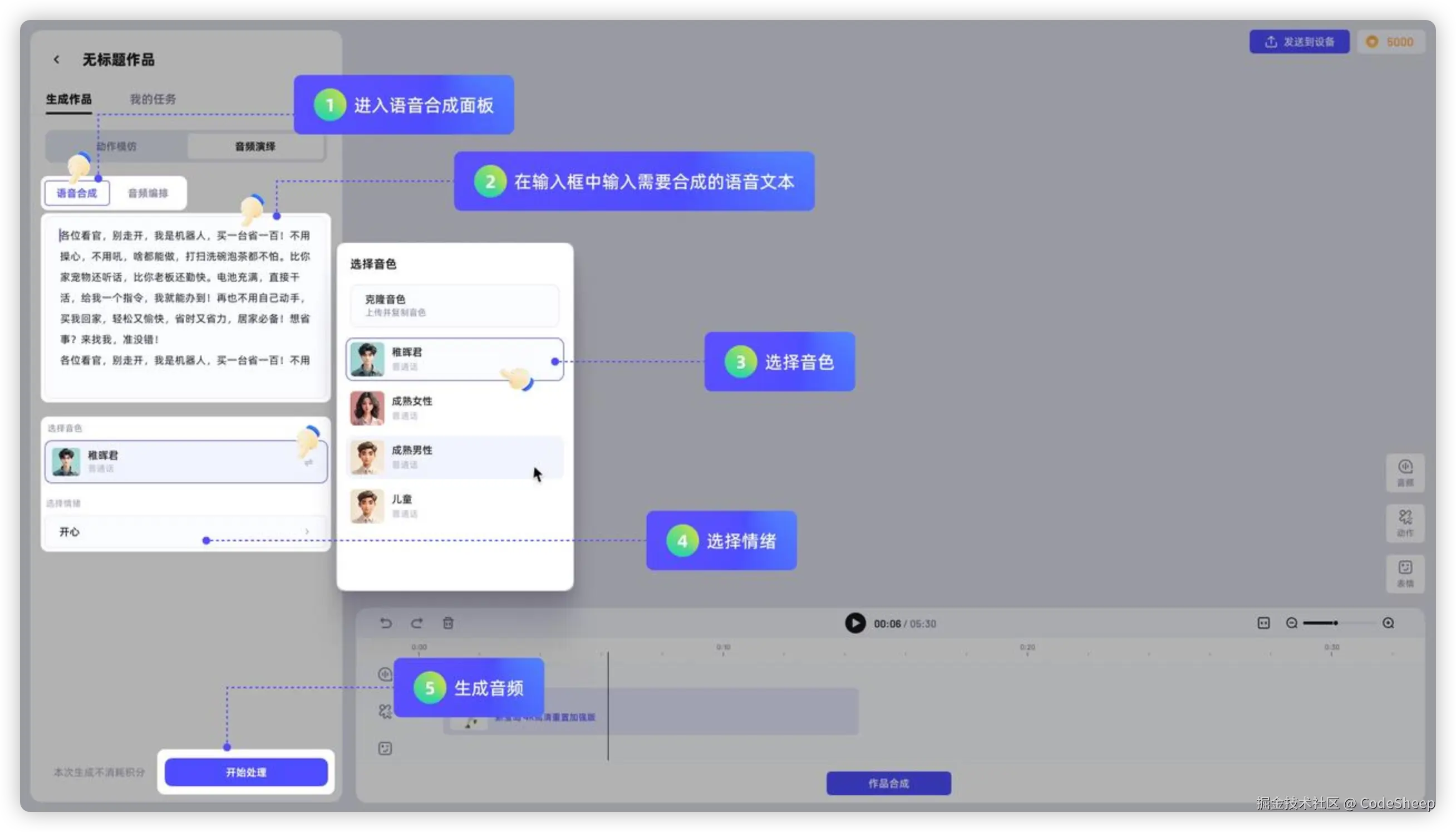
而且该功能为用户提供了音色、情绪等定制化能力,以赋予机器人特定的情绪和个性。
3、时间轴编排
这一次,「灵创」平台将机器人表达三要素 :动作 、表情 、语音全部搬上了时间轴。
如今,用户可以像剪视频一样,通过自由编排、调整细节来编排机器人表演。
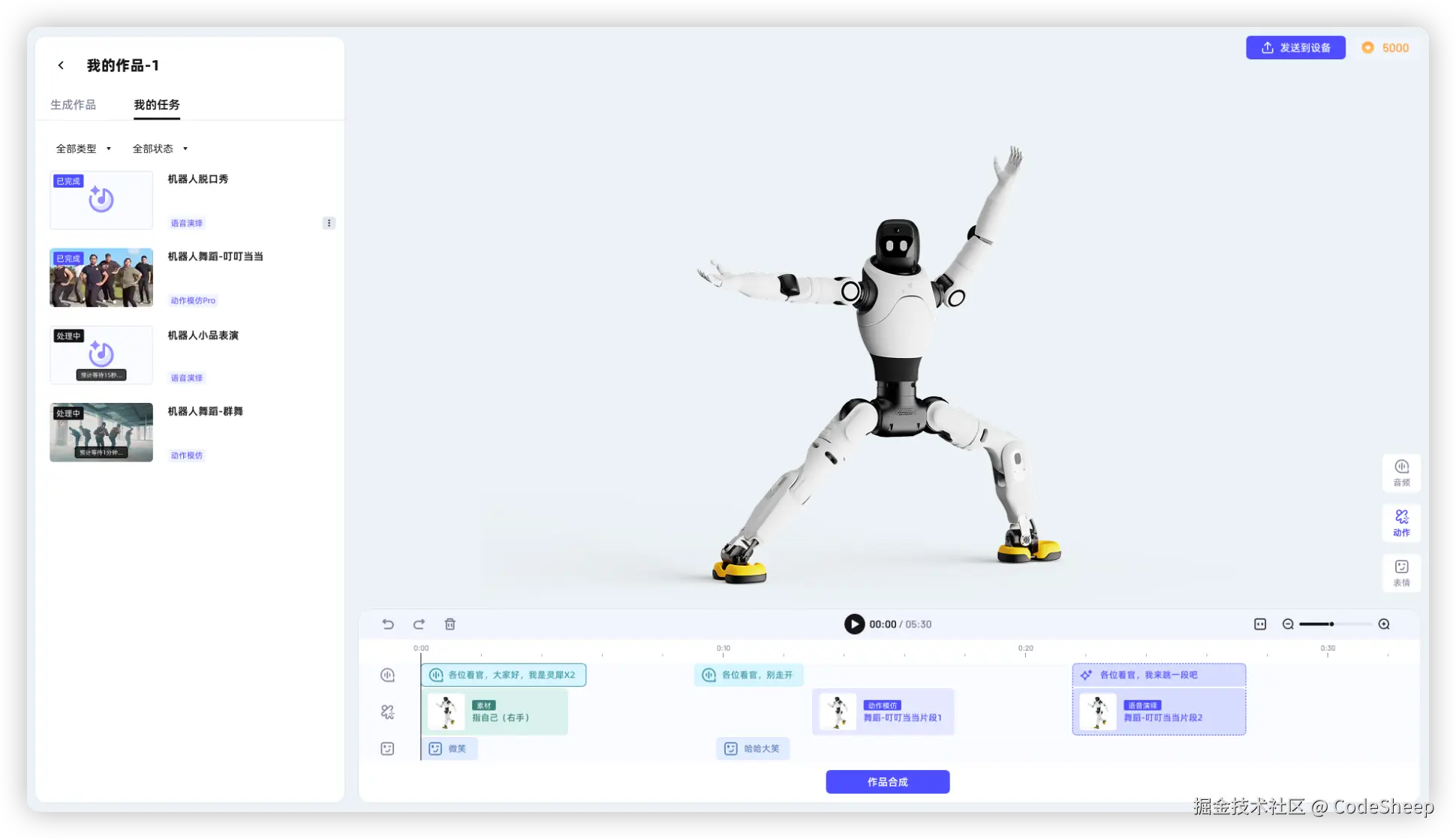
该平台支持动作混剪、组合与故事线编排,以此来帮助用户完成长程表演中的叙事化动作设计。
4、群编群控
针对有多台机器人的用户,「灵创」平台还支持多台机器人的群控、群编,以实现一人操控,百"机"共舞。
「灵创」平台的"设备联动与群控管理"功能,可以实现多设备、多样化动作任务一键下发,分角色以不同动作、不同语音、不同表情协同演绎。
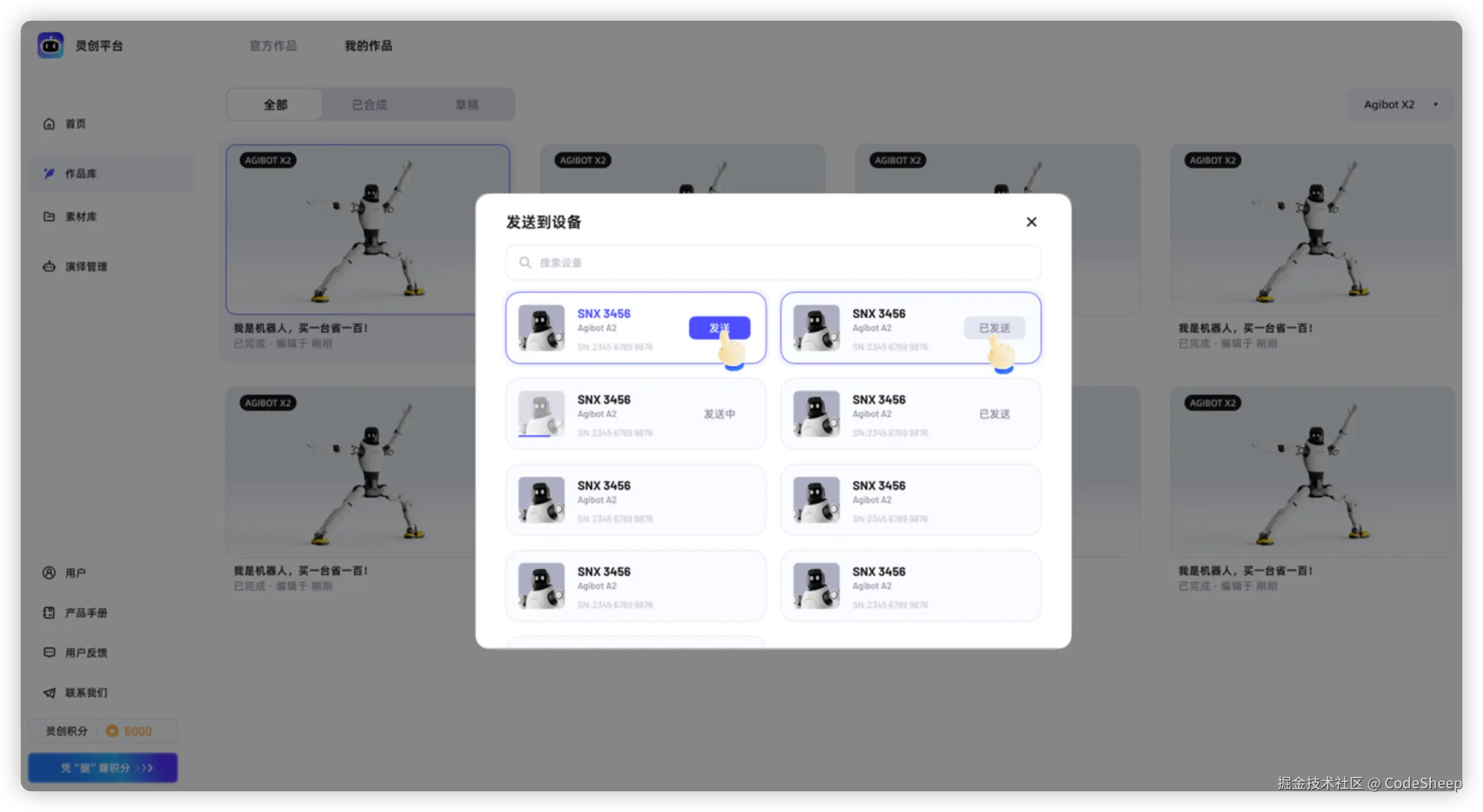
比如针对一场复杂的机器人表演,过去可能需要很多人协作,而如今通过该平台一个人加一台设备,就能完成整支队伍的调度与编排。

除了以上这四点核心功能,「灵创」平台上还提供了各种官方素材库 和动作、表情模板库,用户可以直接从现成库中调用动作、表情等进行个性化创作。
所以总而言之,通过这个平台,过去需要专业背景和专业设备才能完成的机器人创作,现如今的使用门槛大大降低了。
回顾创业的这两年,稚晖君和智元可以说为整个具身智能行业贡献了大量的开创性工作。
其中最具代表性的就是从去年下半年开始的三次大规模官宣机器人资料开源。
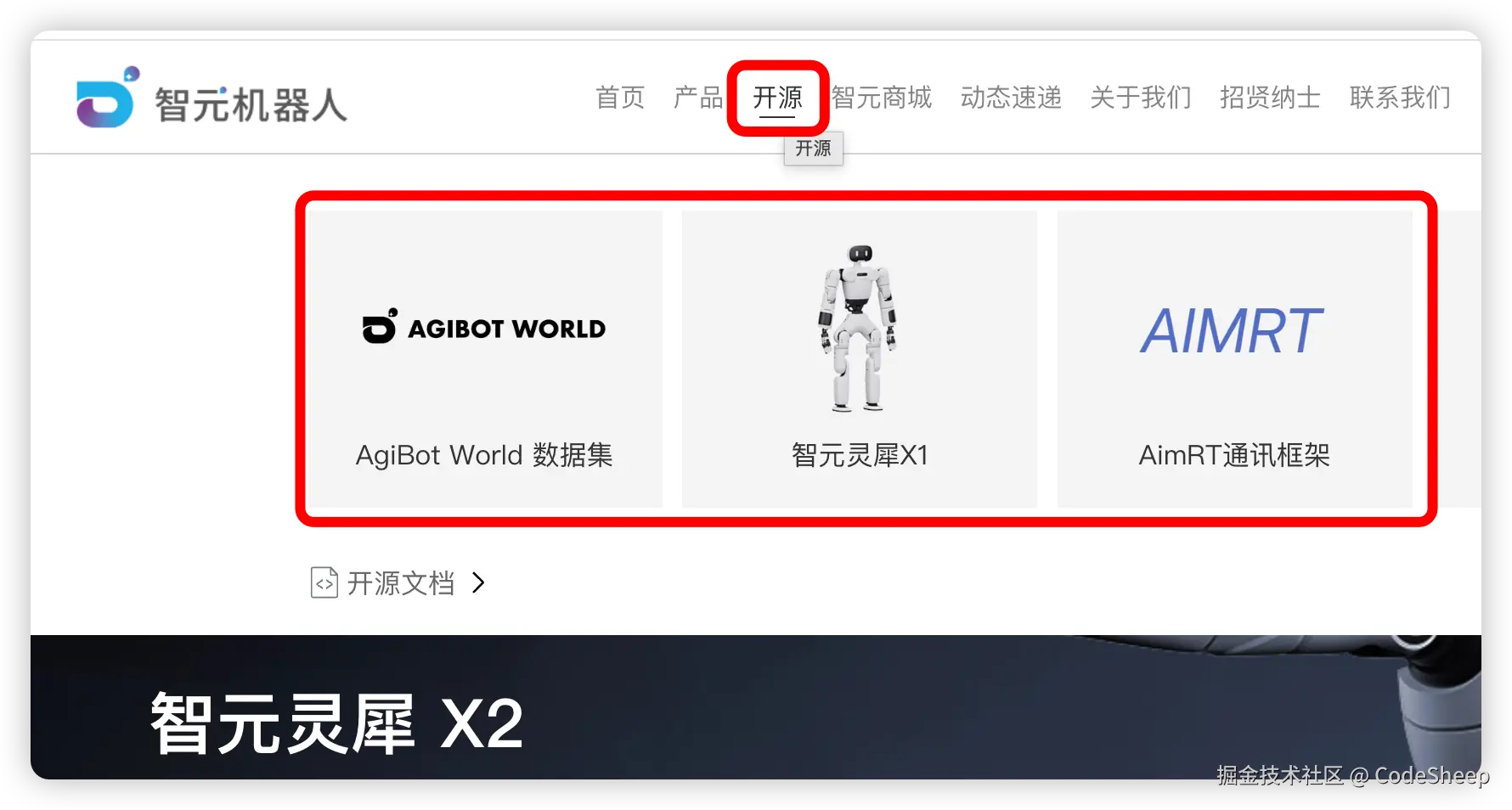
包括到现在,智元机器人官网上还专门设置了一个「开源」菜单,来集中展示智元创业以来所做的开源工作。
第一次开源
第一次开源是去年 9 月底。
当时稚晖君时隔数月突然在 B 站更新了动态并且带来了一项干货,那就是:
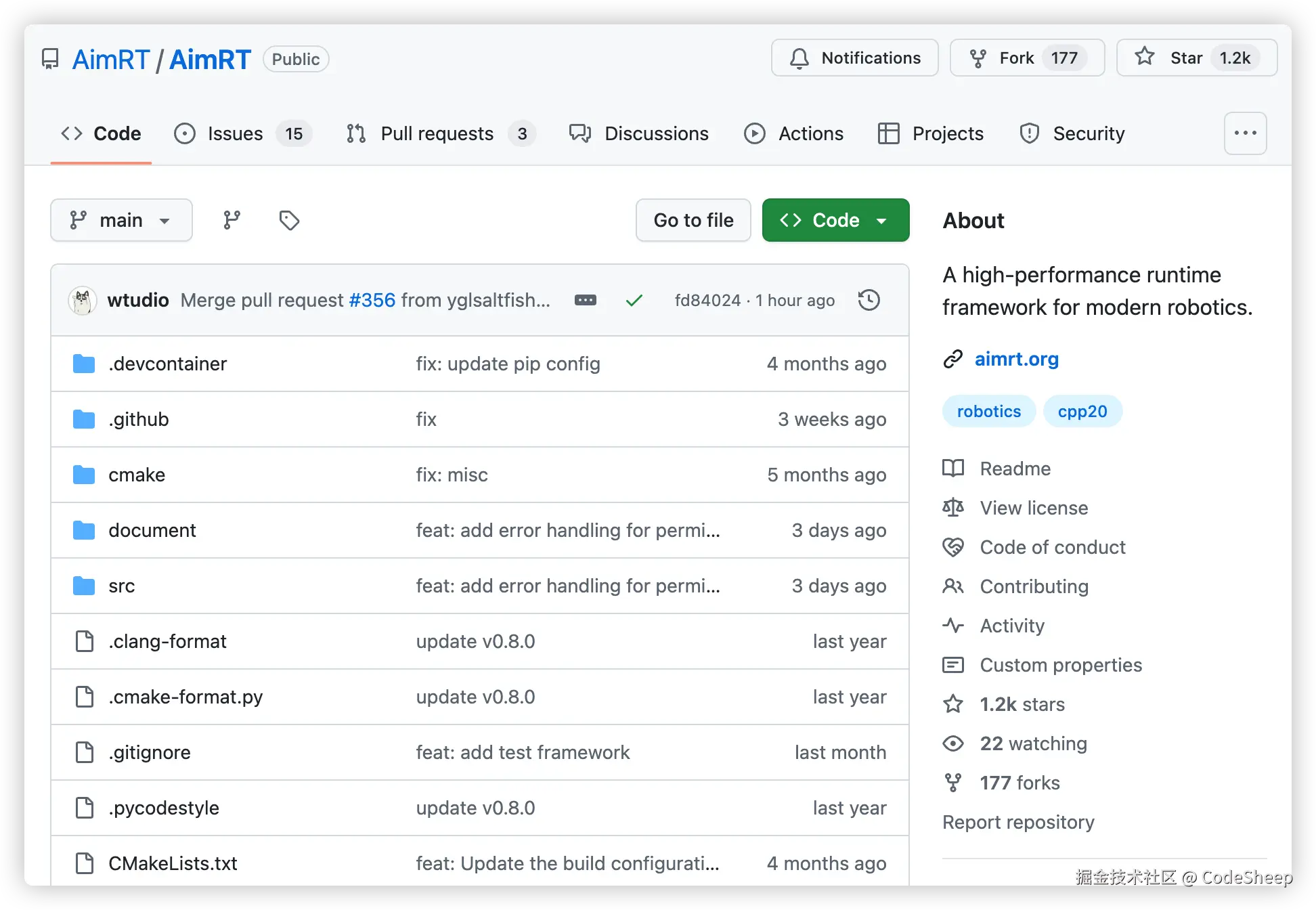
智元自研高性能中间件 AimRT 正式宣布开源。
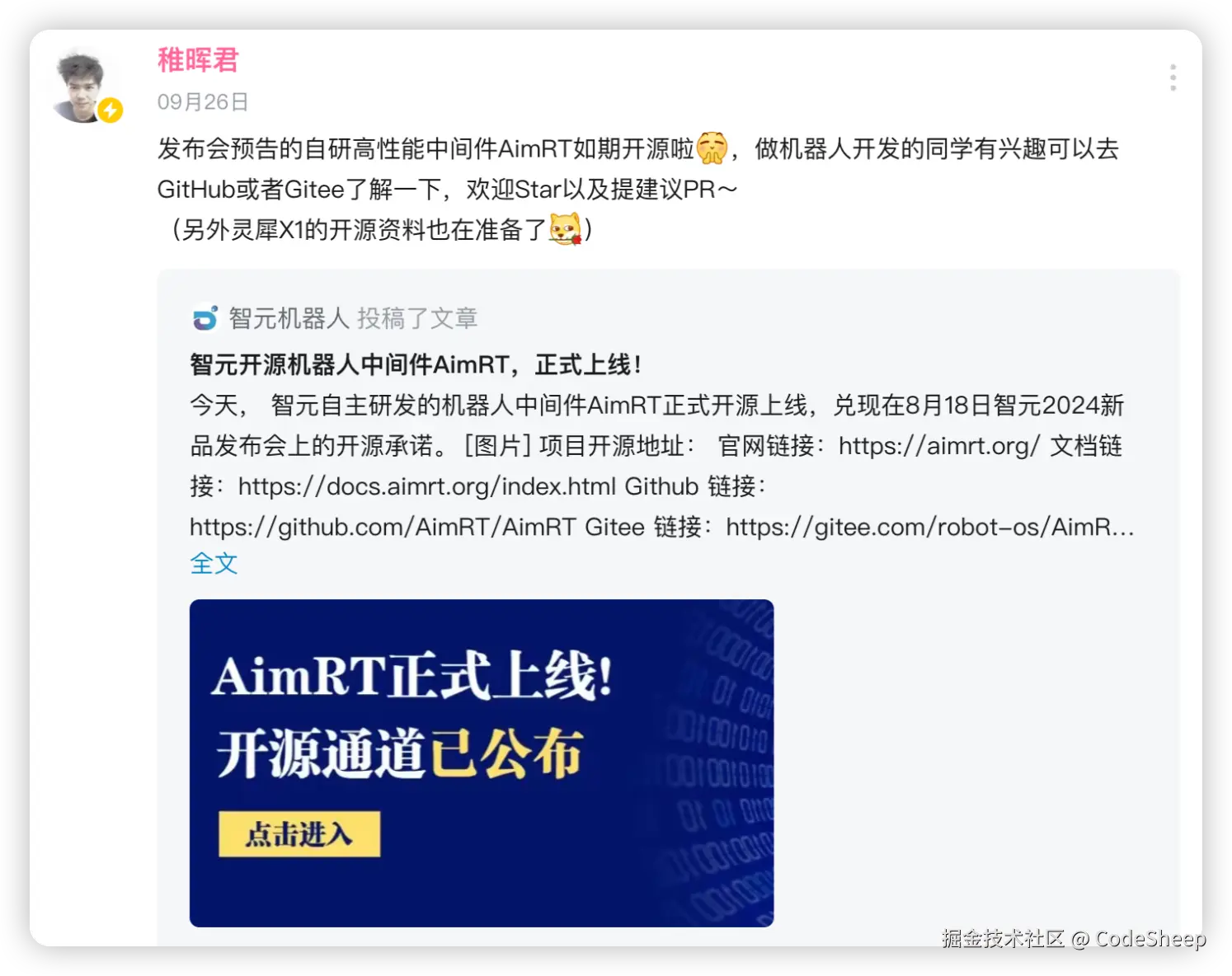
这是一个面向现代机器人领域的运行时开发框架,轻量易部署,在资源管控、异步编程、部署配置等方面均具有更现代设计。
AimRT 项目代码结构如下:
perl
src
├── common --------------------------------- // 一些基础的、可以直接使用的通用组件,例如 string、log 接口、buffer 等
├── examples ------------------------------- // AimRT 官方示例
│ ├── cpp -------------------------------- // CPP 接口的示例
│ ├── py --------------------------------- // Python 接口的示例
│ └── plugins ---------------------------- // 一些各方插件的使用示例
├── interface ------------------------------ // AimRT 接口层
│ ├── aimrt_core_plugin_interface -------- // [CPP] 插件开发接口
│ ├── aimrt_module_c_interface ----------- // [C] 模块开发接口
│ ├── aimrt_module_cpp_interface --------- // [CPP] 模块开发接口,对 C 版本的封装
│ ├── aimrt_module_protobuf_interface ---- // [CPP] 与 protobuf 相关的模块开发接口,基于 CPP 版本接口
│ ├── aimrt_module_ros2_interface -------- // [CPP] 与 ROS2 相关的模块开发接口,基于 CPP 版本接口
│ ├── aimrt_pkg_c_interface -------------- // [C] Pkg 开发接口
│ └── aimrt_type_support_pkg_c_interface - // [C] Type support 包接口
├── plugins -------------------------------- // AimRT 官方插件
├── protocols ------------------------------ // 一些 AimRT 官方的标准协议
├── runtime -------------------------------- // AimRT 运行时
│ ├── core ------------------------------- // 运行时核心库
│ ├── main ------------------------------- // 基于 core 实现的一个主进程"aimrt_main"
│ └── python_runtime --------------------- // 基于 pybind11 封装的 python 版本运行时
└── tools ---------------------------------- // 一些配套工具目前该项目在 GitHub 平台已经累计获得超过 1200 个的 Star 标星。
第二次开源
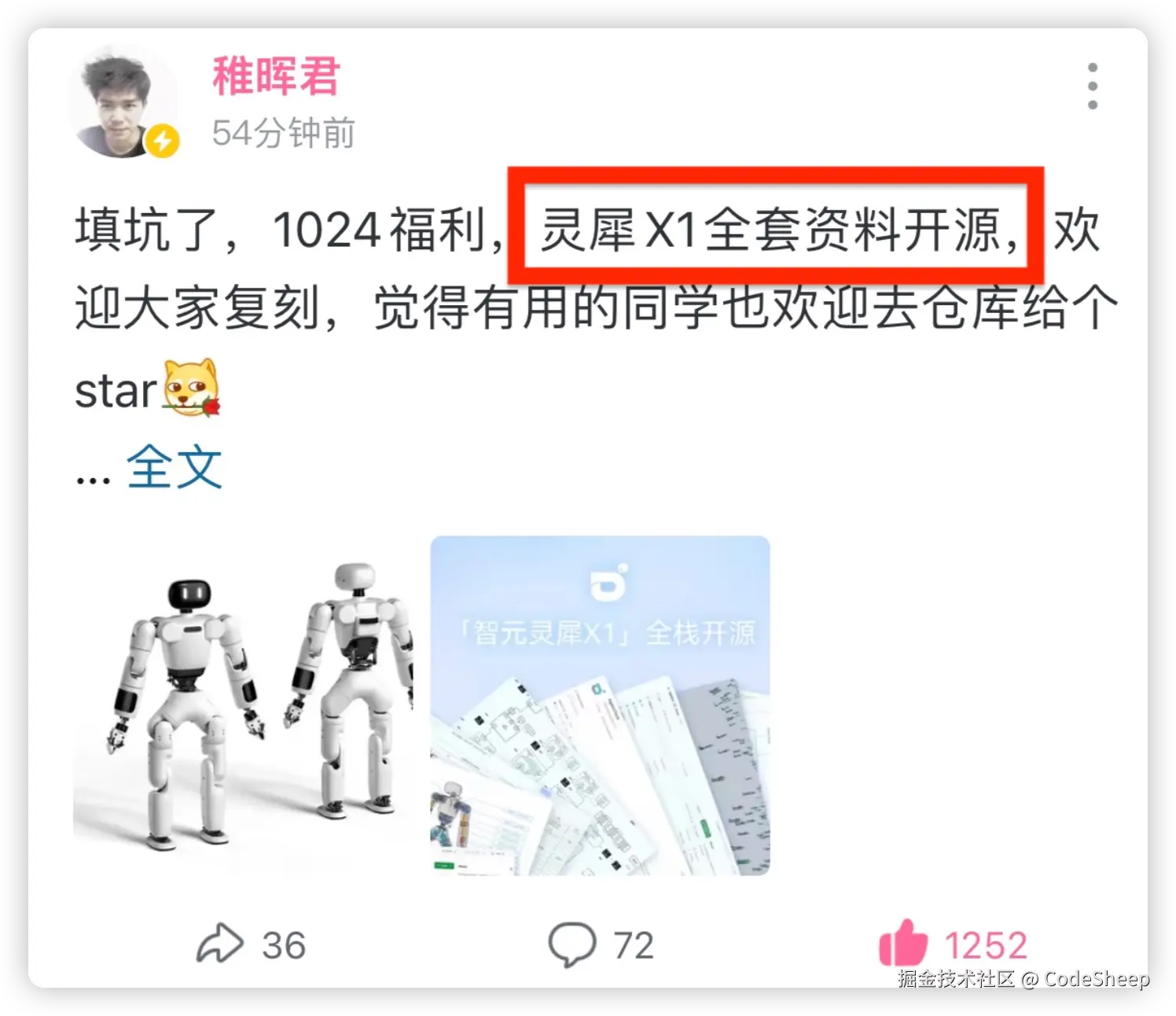
第二次开源正好也是去年 1024 程序员节这个时间点。
当时稚晖君在 B 站动态里又再次官宣:
灵犀 X1 的全套资料也正式开源了!
这是一个包含 29 个关节和 2 个夹爪并且支持扩展头部 3 自由度的全栈开源机器人。
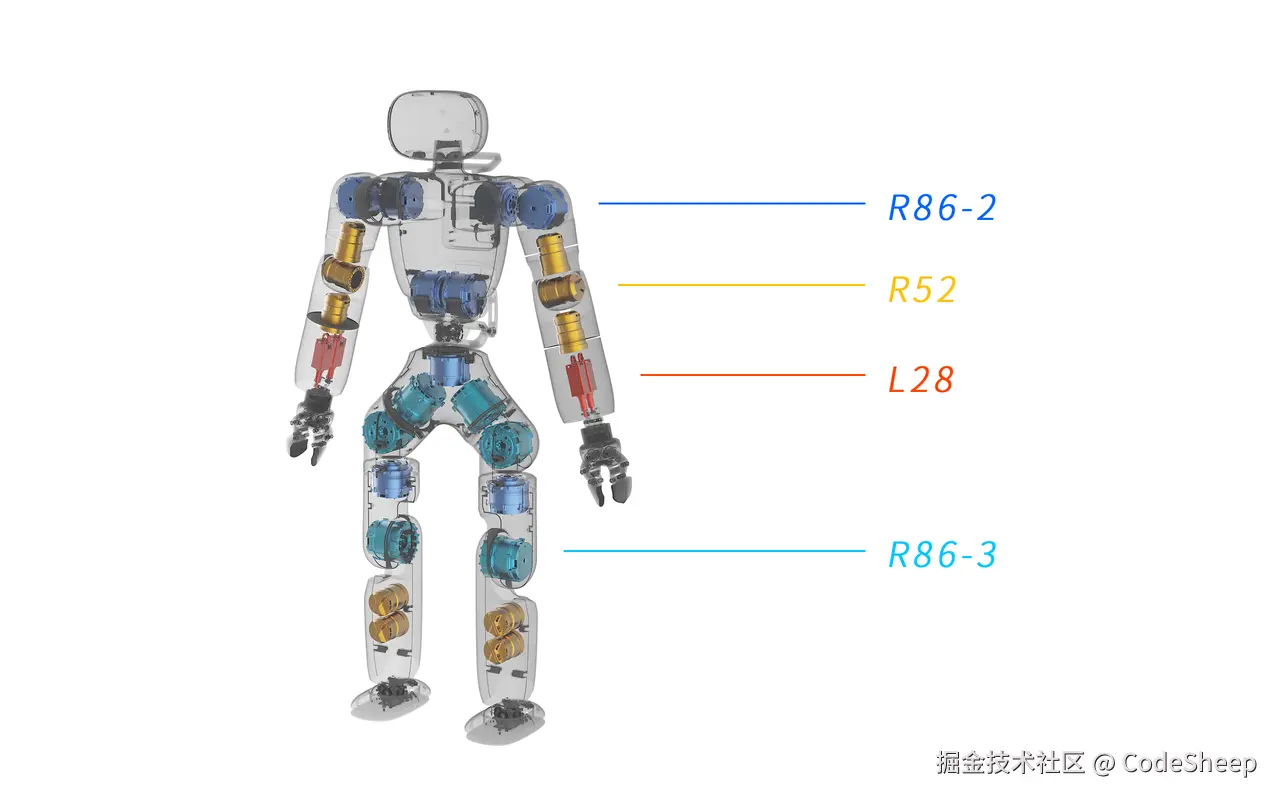
其拥有模块化设计、高自由度,以及高扩展性等诸多优势。
而这次开源则带来了包括如下清单所示的全套开发资料:
- 开发指南(zhiyuan-robot.com/DOCS/OS/X1-PDG)
- 结构设计资料,包括BOM清单、整机STEP、整机图纸、装机SOP(github.com/AgibotTech/agibot_x1_hardware)
- 推理代码(github.com/AgibotTech/agibot_x1_infer)
- 训练代码(github.com/AgibotTech/agibot_x1_train)
- 硬件模块(oshwhub.com/pengzhihui/agibot-x1)
从文档到代码,从图纸到清单,这套软硬件资料全部下来总大小超过了 1.2GB,同时大佬也表示欢迎大家去复刻。
也正因为此,智元机器人也成为了当时业内首家全栈开源人形机器人图纸和代码的公司,非常具有里程碑意义。
目前这套代码仓库在 GitHub 平台上也已经累计获得了好几千颗的 Star 标星。

第三次开源
第三次开源则是去年的年底,稚晖君同样发了动态正式官宣:
开源百万真机数据集 AgiBot World。

开源地址:
这次开源的 AgiBot World 长程数据规模高出 10 倍,场景范围覆盖面扩大 100 倍,数据质量从实验室级上升到工业级标准。
这也是当时全球首个基于全域真实场景、全能硬件平台、全程质量把控的百万真机数据集开源项目。
包括后来,智元还陆续官宣发布了诸如:通用具身基座大模型:GO-1 ,以及具身智能一站式开发平台 Genie Studio等一系列模型或工具。

这些都是整个具身行业发展历程上的重要探索和开拓性工作。
正如智元所说,希望通过开源开放和生态共创来降低机器人的开发门槛,从而共同推进人形机器人和具身智能技术的创新发展。
包括这一次「灵创平台」的正式发布,对机器人开发感兴趣的同学可以说又有福了,这波可以直接站在巨人的肩膀上。
注:本文在GitHub开源仓库「编程之路」 github.com/rd2coding/R... 中已经收录,里面有我整理的6大编程方向(岗位)的自学路线+知识点大梳理、面试考点、我的简历、几本硬核pdf笔记,以及程序员生活和感悟,欢迎star。