一、简单回顾一下什么是事件相机?
事件相机(Event-based Camera)是一种受生物启发的新型视觉传感器 ,与传统帧式相机有着根本性区别。正如文档所述:"相比于以固定帧率采集图像的标准相机,它具有低延迟、高动态范围、低功耗、高时间分辨率等特点。"
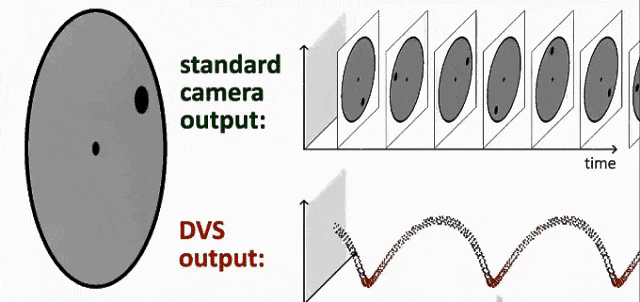
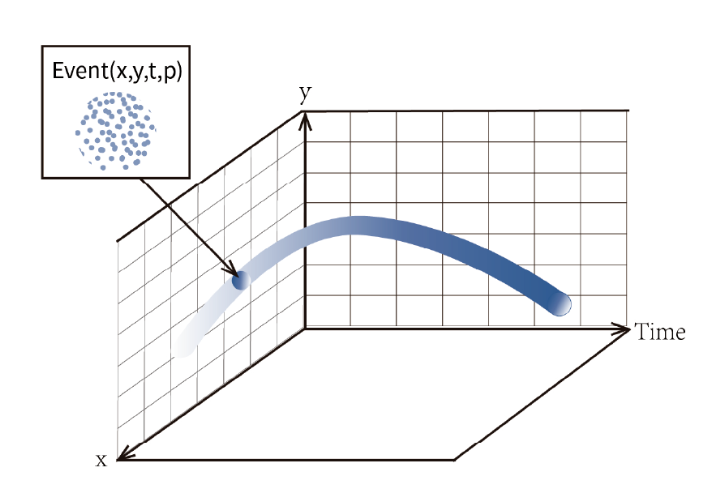
核心工作原理 :事件相机的每个像素都有独立的光电传感模块,当该像素处的亮度变化超过设定阈值时,就会生成、输出事件数据。这种成像范式的好处是大大减少冗余数据,提高后处理算法的计算效率。
从技术指标看,事件相机的优势显著:
动态范围超过120dB,而传统帧相机通常只有60dB
微秒级时间分辨率,等效帧率超过200,000fps
功耗低至1mW级别,适合边缘设备部署
数据量减少99%,只传输变化信息
二、灵光一号:RGB+EVS视觉融合相机
"灵光一号"事件相机通过在同一颗芯片上集成RGB传感器和事件传感器,实现了两种视觉信息的同步捕捉和处理。RGB传感器负责捕捉高质量的彩色图像,而事件传感器则专注于捕捉场景中的动态变化,以事件流的形式输出。
这种融合方式不仅保留了RGB相机丰富的色彩信息,还充分发挥了事件相机的高动态范围、低延迟和低功耗等优点。

三、SDK基础信息介绍
HV Toolkit 是 ShiMetaPi 推出的 专为事件相机(DVS)设计的高性能C++ SDK,支持事件数据流(EVS)和图像数据流(APS)的实时采集与处理,兼容EventCD格式,适用于高性能事件相机开发。
技术规格明细表
|--------|--------|--------------------------|
| 类别 | 项目 | 规格参数 |
| 事件相机参数 | EVS分辨率 | 768 × 608(子采样:384 × 304) |
| 事件相机参数 | APS分辨率 | 768 × 608(可调) |
| 事件相机参数 | 数据传输 | USB 3.0 高速传输 |
| 事件相机参数 | 事件格式 | 兼容 EventCD / EVT2.0 |
| 系统要求 | C++标准 | C++17 或更高版本 |
| 系统要求 | CMake | 3.10 或更高版本 |
| 系统要求 | 操作系统 | Ubuntu 22.04 |
2、依赖说明
-
OpenCV:图像处理与可视化(
libopencv-dev) -
libusb-1.0:USB设备通信(
libusb-1.0-0-dev) -
Hybrid Visoin SDK: ShimetaPi API
-
Openeb:第三方依赖库(可选)
四、支持Python调用,提升使用效率
1、构建基于HV项目
# Ubuntu/Debian
sudo apt-get update
sudo apt-get install build-essential cmake libusb-1.0-0-dev libopencv-dev
# 给脚本添加执行权限
chmod +x install_libs.sh
# 安装到默认位置 (/usr/local)
./install_libs.sh
# 或者安装到指定位置
./install_libs.sh /path/to/install2、运行示例程序
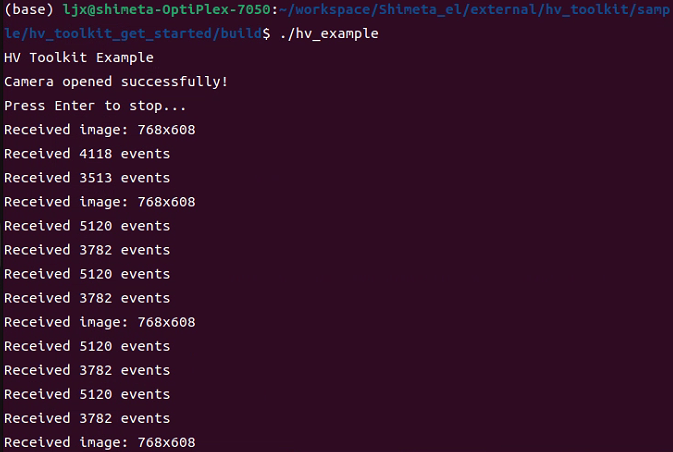
2.1 hv_toolkit_get_started
# 进入示例程序目录cd sample/hv_toolkit_get_started
# 构建示例程序
mkdir build && cd build
cmake ..
make
# 运行示例程序
./hv_toolkit_get_started程序运行截图
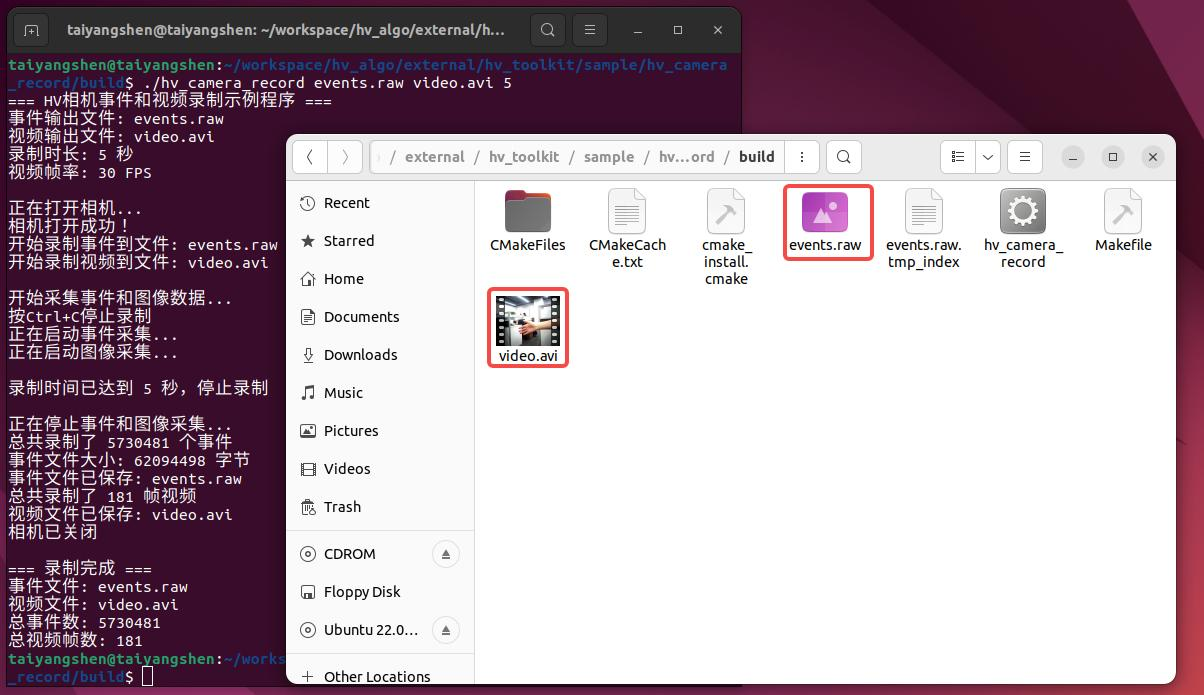
2.2 hv_camera_record
# 进入示例程序目录cd sample/hv_camera_record
# 构建示例程序
mkdir build && cd build
cmake..
make
# 运行示例程序
./hv_camera_record events.raw video.avi 5程序运行截图
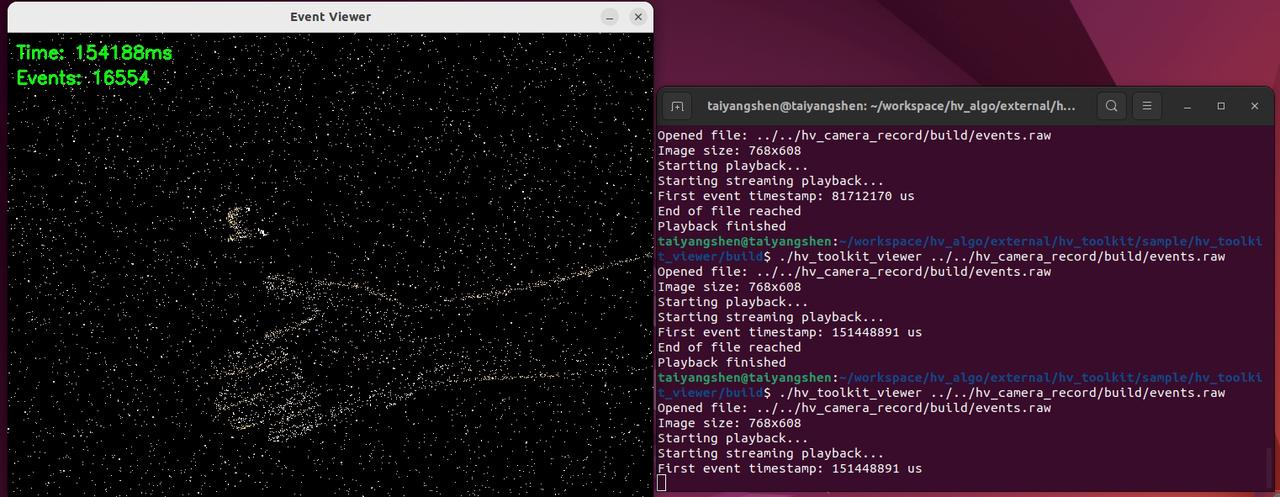
2.3 hv_toolkit_viewer
# 进入示例程序目录cd sample/hv_toolkit_viewer
# 构建示例程序
mkdir build && cd build
cmake..
make
# 运行示例程序
./hv_toolkit_viewer ../../hv_camera_record/build/events.raw# 进入示例程序目录 cd sample/hv_toolkit_viewer # 构建示例程序mkdir build && cd build cmake.. make# 运行示例程序 ./hv_toolkit_viewer ../../hv_camera_record/build/events.raw
程序运行截图
3、Python 示例程序
3.1 安装 Python 依赖
# 安装 Python 基础依赖
sudo apt update
sudo apt install -y python3-opencv python3-pip python3-numpy
# 安装 Metavision SDK(如果还没有安装)
curl -L https://propheseeai.jfrog.io/artifactory/api/security/keypair/prophesee-gpg/public >/tmp/propheseeai.jfrog.op.asc
sudo cp /tmp/propheseeai.jfrog.op.asc /etc/apt/trusted.gpg.d
sudo add-apt-repository 'https://propheseeai.jfrog.io/artifactory/openeb-debian/'
sudo apt update
sudo apt -y install metavision-openeb
# 安装 h5py(Metavision 依赖)
pip3 install h5py --user3.2 配置 USB 设备权限
# 赋予USB设备访问权限(相机连接后执行)
sudo chmod -R 777 /dev/bus/usb/3.3 运行 Python 示例
1) 编解码器测试(无需硬件)
cd sample/python/hv_toolkit_encoder
python3 test_codec.py2)相机入门示例(需要相机)
cd sample/python/hv_toolkit_get_started
python3 hv_toolkit_get_started.py
# 按 q 键退出3)录制示例(需要相机)
cd sample/python/hv_toolkit_record
python3 recode_test.py
# 录制15秒或按 Ctrl+C 停止4)事件读取示例(需要录制的事件文件)
cd sample/python/hv_toolkit_reader_test
python3 hv_toolkit_reader_test.py ../hv_toolkit_record/recorded_events.raw
# 按 q 键退出3.4 构建基于Openeb项目
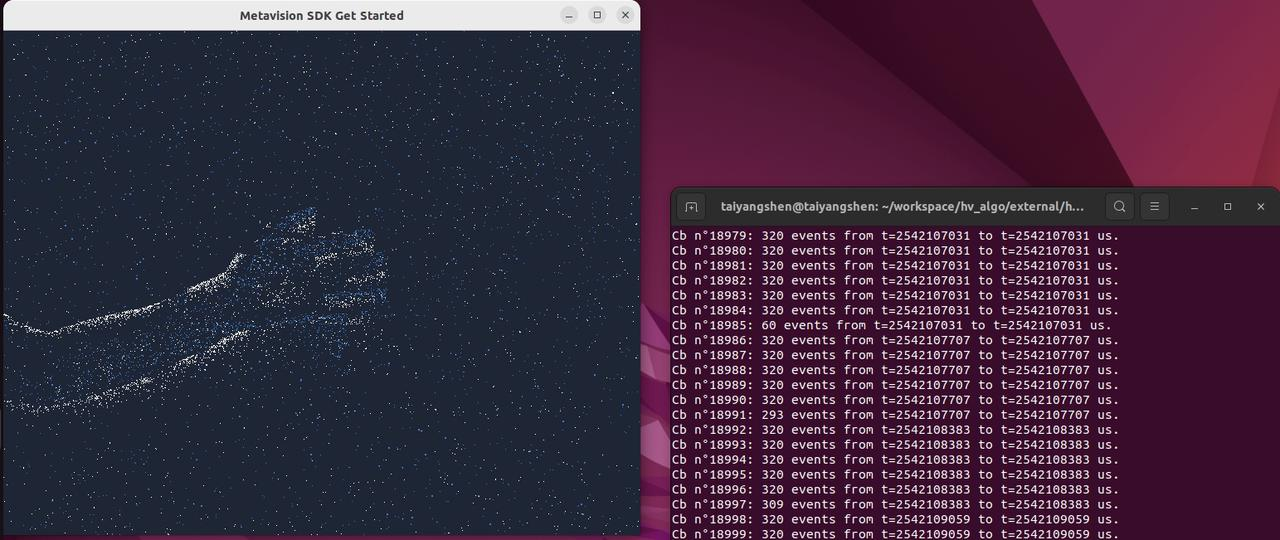
metavision_sdk_test示例程序
# 安装openeb SDK
curl -L https://propheseeai.jfrog.io/artifactory/api/security/keypair/prophesee-gpg/public >/tmp/propheseeai.jfrog.op.asc
sudo cp /tmp/propheseeai.jfrog.op.asc /etc/apt/trusted.gpg.d
sudo add-apt-repository 'https://propheseeai.jfrog.io/artifactory/openeb-debian/'
sudo apt update
sudo apt -y install metavision-openeb
# 使用openeb打开相机需要先安装我们的相机插件# 我们已经将相机插件编译成lib,使用如下命令复制到metavision的相机搜索路径下
sudo cp ./lib/libhal_camera_hal.so /usr/local/lib/metavision/hal/plugins/
# 进入示例程序目录cd sample/metavision_sdk_test
# 构建示例程序
mkdir build && cd build
cmake..
make
# 运行示例程序
./metavision_sdk_test程序运行截图
五、立即开始使用
安装方式:
bash
pip install shimetapi-hybrid-vision
conda install -c shimetapi hybrid-vision系统要求:
-
Ubuntu 18.04+ / Windows 10+
-
Python 3.7+
-
OpenCV 4.0+
资源获取:
技术支持: