C# 基于halcon的视觉工作流-章62 点云采样
本章目标:
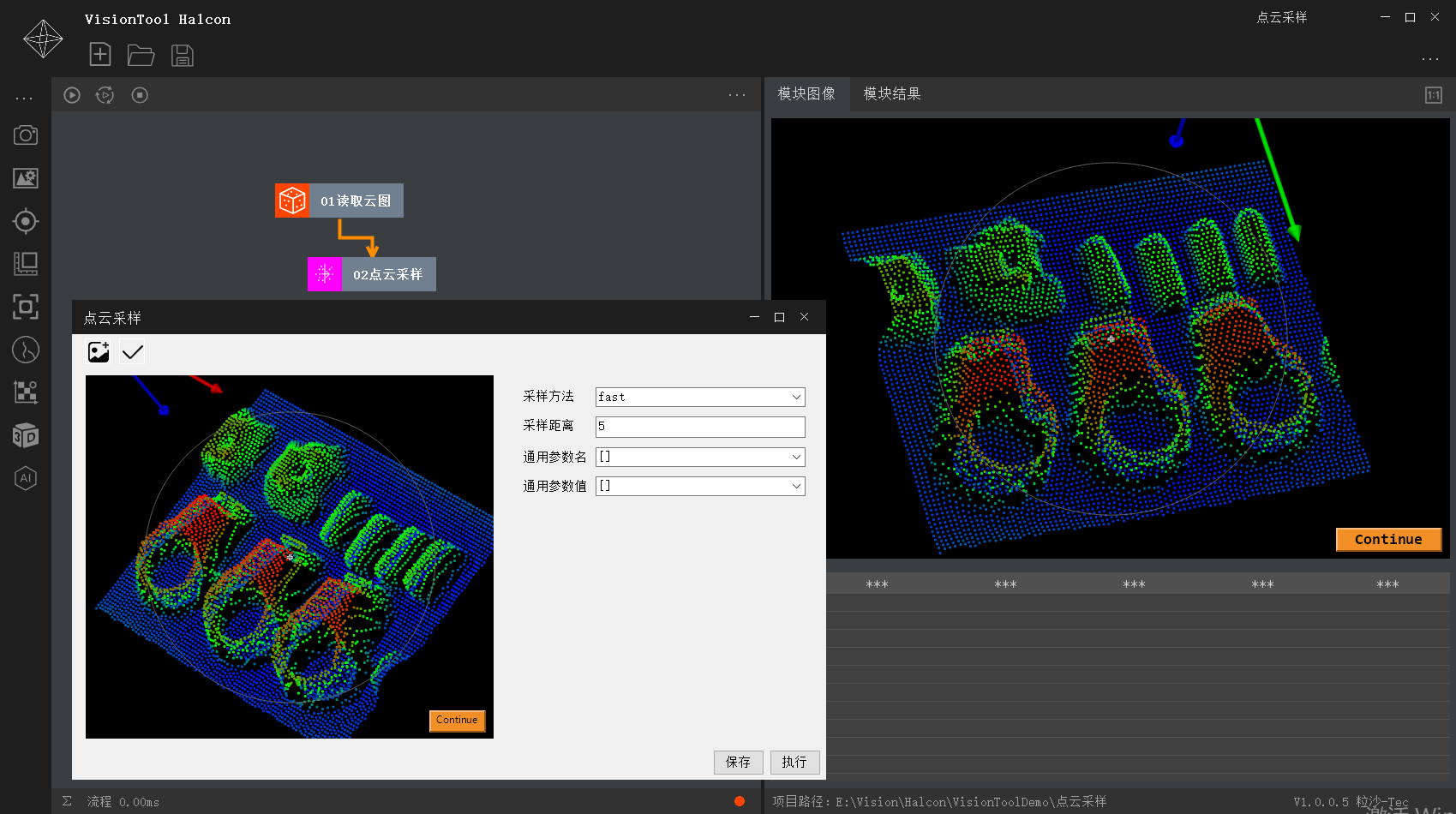
一、sample_object_model_3d点云采样;
一、sample_object_model_3d点云采样;
本质是对三维空间中的几何数据进行离散化重采样,通过设定的采样规则(距离、方法、精度),从原始 3D 模型中筛选 / 生成符合要求的点集、网格或面数据,同时保留模型的核心几何特征。
其核心目标分为两类:
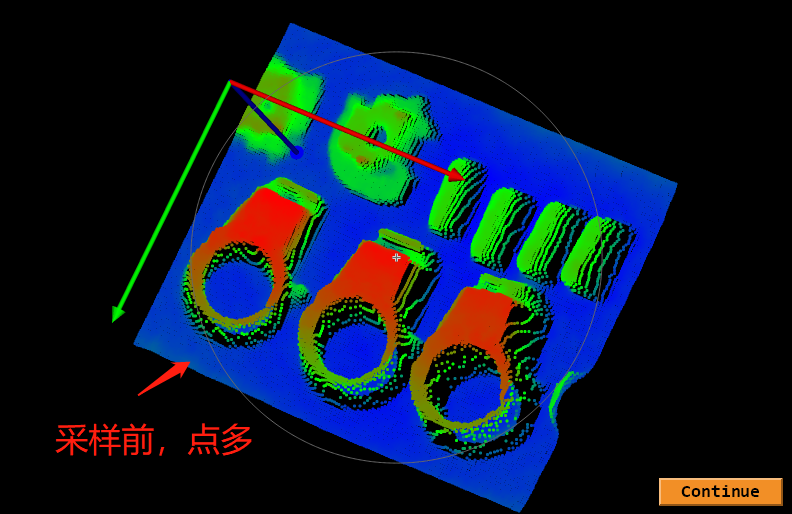
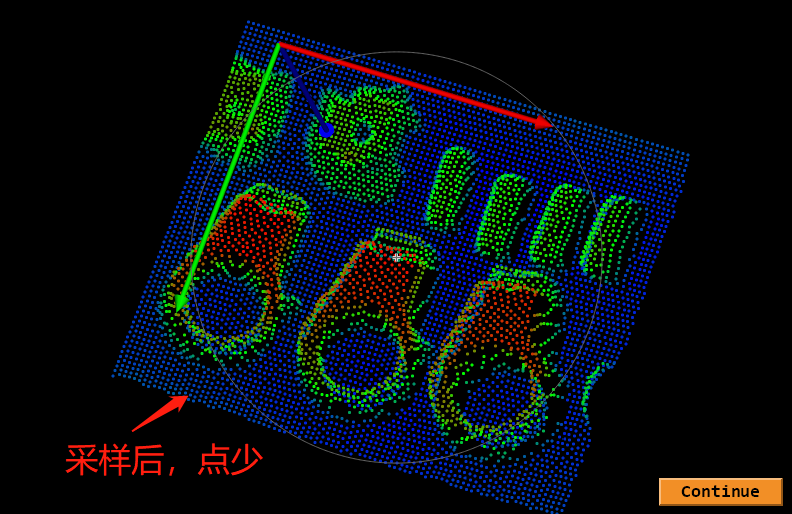
精简数据:对高密度点云 / 网格降采样,减少数据量,提升后续处理(如配准、检测)的效率;
均匀化数据:对稀疏 / 不规则的原始 3D 模型补点或重采样,生成均匀分布的点云,保证几何特征的完整性。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章。
一款自研的免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
