0. 环境
-
ubuntu18台式机
-
奥比中光 Orbbec Astra Pro 单目结构光摄像头
-
opencv 3.4.20 + OpenNI_2.3.0.66
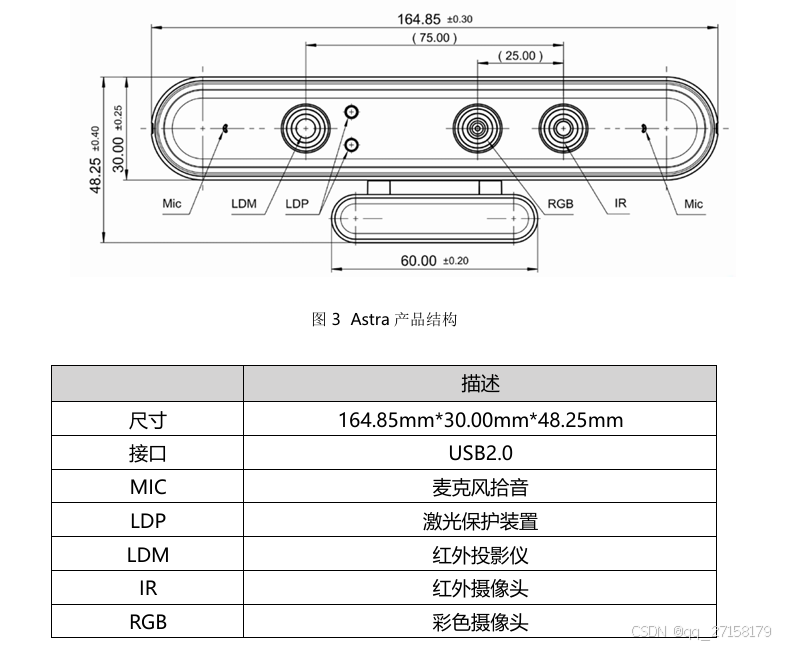
1. Astra Pro出厂测试
1.1 获取sdk
官网资料
https://www.orbbec.com.cn/index/Download2025/info.html?cate=121\&id=1
链接到
https://github.com/orbbec/OpenNI_SDK/tree/main
sdk
https://dl.orbbec3d.com/dist/openni2/OpenNI_2.3.0.66.zip
https://3dclub.orbbec3d.com/t/universal-download-thread-for-astra-series-cameras/622/12把
OpenNI_2.3.0.66.zip
拷贝到
astrapro_out_of_box\ext
1.2 环境变量
cd ~/workspace/astrapro_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"
echo $WORK_DIR
echo $ARCH
echo $C_COMPILER
echo $CXX_COMPILER
echo $AR1.3 解压并切换目录
cd $WORK_DIR
cd ext/
unzip -d OpenNI_2.3.0.66 OpenNI_2.3.0.66.zip
cd OpenNI_2.3.0.66/Linux/OpenNI-Linux-x64-2.3.0.661.4 安装脚本
chmod +x install.sh
sudo ./install.sh1.5 环境变量
source OpenNIDevEnvironment1.6 测试demo:Samples/SimpleViewer
cd $WORK_DIR
cd ext/
cd OpenNI_2.3.0.66/Linux/OpenNI-Linux-x64-2.3.0.66
cd Samples/SimpleViewer1.6.1 依赖
sudo apt-get install freeglut3-dev1.6.2 编译
make -j41.6.3 运行测试
cd Bin/x64-Release/
sudo ./SimpleViewer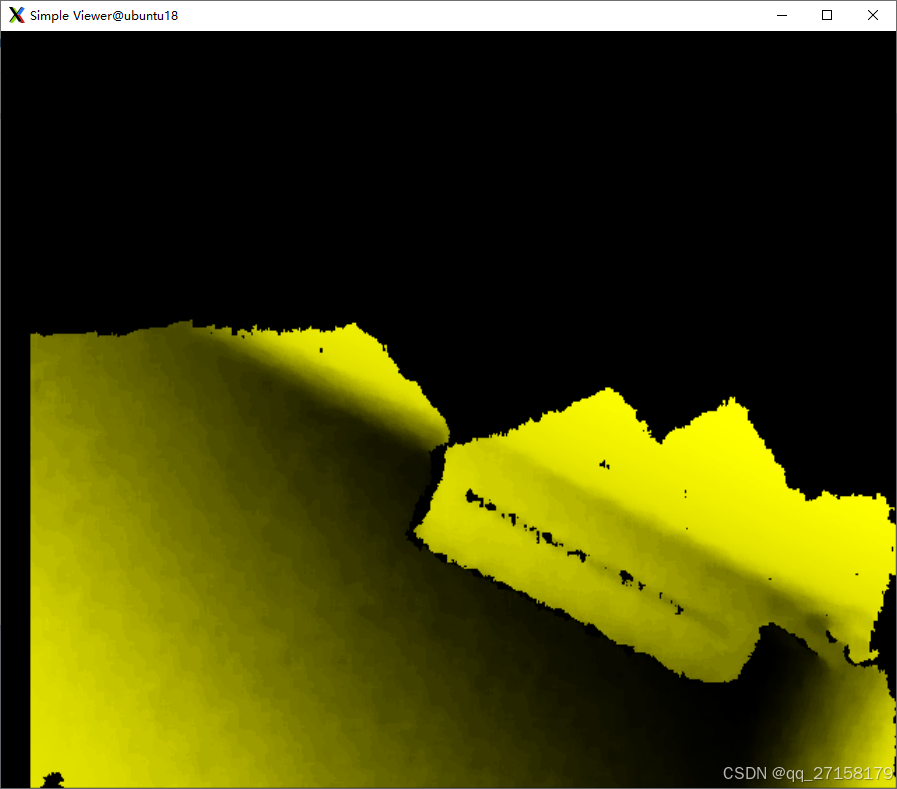
2. opencv与rgb图像
2.0 opencv说明
opencv,不用加openni,opencv4的官网文档说openni可以支持astra,但是测试不通过。打不开IR摄像头。Astra Pro的RGB是UVC协议,不用SDK。
2.1 准备源码
下载了
opencv-3.4.20.tar.gz
放在
~/workspace/astrapro_out_of_box/ext
解压
cd /home/xxjianvm/workspace/astrapro_out_of_box/ext
tar -zvxf opencv-3.4.20.tar.gz
2.2 安装依赖
sudo apt-get install -y build-essential
sudo apt-get install -y cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev2.3 环境变量
cd ~/workspace/astrapro_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"2.4 命令行从源码编译安装
把以下内容粘贴到终端中即可。
cd $WORK_DIR
cd ext/
mkdir -p install && mkdir -p install/$ARCH && mkdir -p install/$ARCH/lib && mkdir -p install/$ARCH/include
rm -rf opencv-3.4.20
tar -zvxf opencv-3.4.20.tar.gz && cd opencv-3.4.20
rm -rf build
mkdir build && cd build
cmake -DCMAKE_C_COMPILER=$C_COMPILER -DCMAKE_CXX_COMPILER=$CXX_COMPILER \
-DCMAKE_BUILD_TYPE=RELEASE \
-DCMAKE_INSTALL_PREFIX=$WORK_DIR/ext/install/$ARCH \
-DBUILD_DOCS=OFF \
-DBUILD_EXAMPLES=OFF \
-DBUILD_TESTS=OFF \
-DBUILD_PERF_TESTS=OFF \
-DSOFTFP=OFF \
-DCMAKE_C_FLAGS="-L$WORK_DIR/ext/install/$ARCH/lib" ..
make -j8
make install
2.5 demo_rgb
把demo_rgb.cpp放到~/workspace/astrapro_out_of_box/demo文件夹中。
2.5.1 demo_rgb.cpp内容
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main() {
VideoCapture cap(0); // Open default camera
if (!cap.isOpened()) {
cout << "Failed to open camera!" << endl;
return -1;
}
namedWindow("Camera", WINDOW_NORMAL);
while (true) {
Mat frame;
cap.read(frame); // Capture a frame
if (frame.empty()) {
cout << "Failed to read frame!" << endl;
break;
}
imshow("Camera", frame); // Display the frame
if (waitKey(1) == 'q') break; // Exit on 'q'
}
cap.release();
destroyAllWindows();
return 0;
}2.5.2 编译可执行程序
cd ~/workspace/astrapro_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"
echo $WORK_DIR
echo $ARCH
echo $C_COMPILER
echo $CXX_COMPILER
echo $AR
# 编译可执行程序
$CXX_COMPILER -o demo_rgb demo/demo_rgb.cpp -Iext/install/$ARCH/include -L$WORK_DIR/ext/install/$ARCH/lib -lopencv_core -lopencv_highgui -lopencv_imgproc -lopencv_imgcodecs -lopencv_photo -lopencv_videoio -lopencv_video 2.5.3 运行
cd ~/workspace/astrapro_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
export LD_LIBRARY_PATH=$WORK_DIR/ext/install/$ARCH/lib:$LD_LIBRARY_PATH
./demo_rgb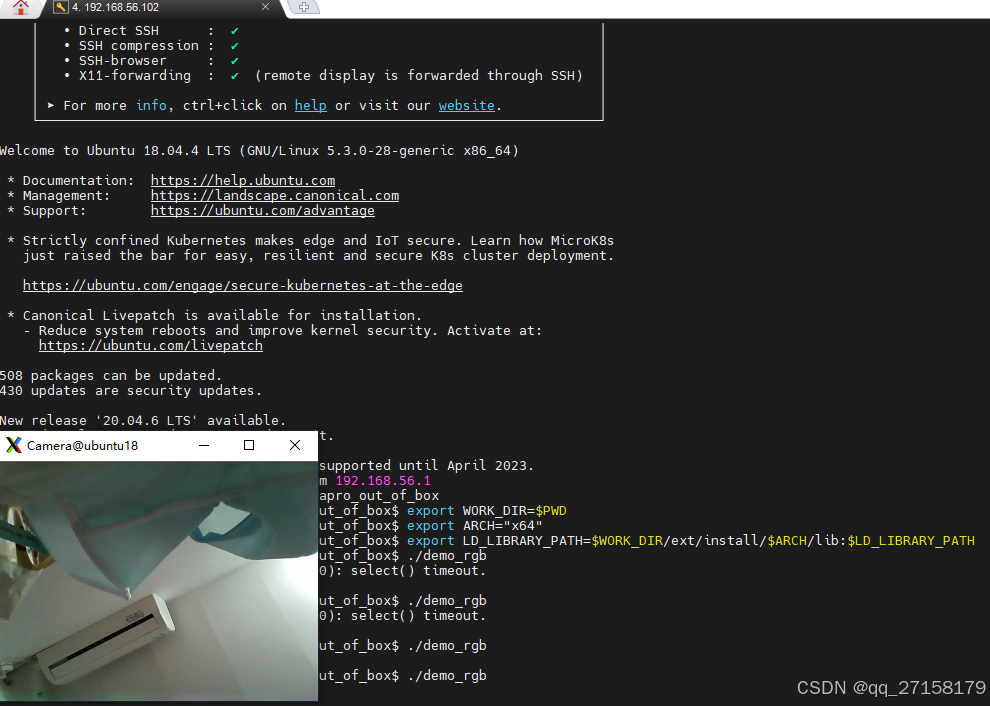
3. openni读取depth图像并转opencv的mat格式
3.1 把sdk安装到自定义目录
cd ~/workspace/astrapro_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
cd $WORK_DIR
cd ext
mkdir -p install && mkdir -p install/$ARCH && mkdir -p install/$ARCH/lib && mkdir -p install/$ARCH/include
rm -rf OpenNI_2.3.0.66
unzip -d OpenNI_2.3.0.66 OpenNI_2.3.0.66.zip
cp OpenNI_2.3.0.66/Linux/OpenNI-Linux-$ARCH-2.3.0.66/Include/* install/$ARCH/include/ -r
cp OpenNI_2.3.0.66/Linux/OpenNI-Linux-$ARCH-2.3.0.66/Redist/* install/$ARCH/lib/ -r
echo "[sdk OK]"3.2 demo_depth.cpp
#include <iostream>
#include <OpenNI.h>
#include <opencv2/opencv.hpp>
openni::VideoStream** m_streams;
int main(int argc, char** argv)
{
openni::Status rc = openni::STATUS_OK;
openni::Device device;
openni::VideoStream streamDepth;
const char* deviceURI = openni::ANY_DEVICE;
if (argc > 1) {
deviceURI = argv[1];
}
rc = openni::OpenNI::initialize();
printf("After initialization:\n%s\n", openni::OpenNI::getExtendedError());
rc = device.open(deviceURI);
if (rc != openni::STATUS_OK) {
printf("SimpleViewer: Device open failed:\n%s\n", openni::OpenNI::getExtendedError());
openni::OpenNI::shutdown();
return 1;
}
rc = streamDepth.create(device, openni::SENSOR_DEPTH);
if (rc == openni::STATUS_OK) {
rc = streamDepth.start();
if (rc != openni::STATUS_OK) {
printf("SimpleViewer: Couldn't start depth stream:\n%s\n", openni::OpenNI::getExtendedError());
streamDepth.destroy();
}
} else {
printf("SimpleViewer: Couldn't find depth stream:\n%s\n", openni::OpenNI::getExtendedError());
}
openni::VideoMode depthVideoMode;
int m_width;
int m_height;
if (!streamDepth.isValid()) {
printf("SimpleViewer: No valid streams. Exiting\n");
openni::OpenNI::shutdown();
return 2;
} else {
depthVideoMode = streamDepth.getVideoMode();
m_width = depthVideoMode.getResolutionX();
m_height = depthVideoMode.getResolutionY();
}
m_streams = new openni::VideoStream*[1];
m_streams[0] = &streamDepth;
int iMaxDepth = streamDepth.getMaxPixelValue();
openni::VideoFrameRef frameDepth;
for( int i = 0; i < 100; ++ i ) {
int changedIndex;
openni::Status rc = openni::OpenNI::waitForAnyStream(m_streams, 1, &changedIndex);
if (rc != openni::STATUS_OK) {
printf("Wait failed\n");
continue;
}
streamDepth.readFrame( &frameDepth );
const cv::Mat mImageDepth( frameDepth.getHeight(), frameDepth.getWidth(), CV_16UC1, (void*)frameDepth.getData());
cv::Mat mScaledDepth;
mImageDepth.convertTo( mScaledDepth, CV_8U, 255.0 / iMaxDepth );
cv::imshow("Depth", mScaledDepth);
if (cv::waitKey(30) == 'q') {
break;
}
}
streamDepth.destroy();
device.close();
openni::OpenNI::shutdown();
}3.3 编译可执行程序
cd ~/workspace/astrapro_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
$CXX_COMPILER -o demo_depth demo/demo_depth.cpp -Iext/install/$ARCH/include -Lext/install/$ARCH/lib -lOpenNI2 -lopencv_core -lopencv_highgui -lopencv_imgproc -lopencv_imgcodecs -lopencv_photo -lopencv_videoio -lopencv_video 3.4 运行
export WORK_DIR=$PWD
export ARCH="x64"
export LD_LIBRARY_PATH=$OPENNI2_REDIST:$WORK_DIR/ext/install/$ARCH/lib:$LD_LIBRARY_PATH
./demo_depth
4. 驱动
4.1 m_device.cpp
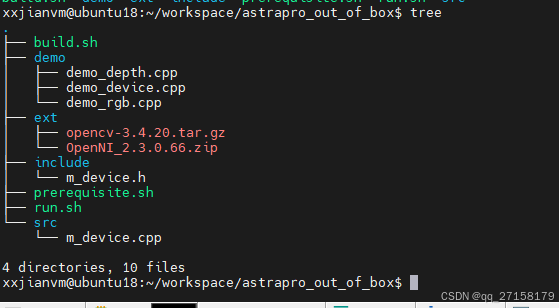
把m_device.cpp放到 ~/workspace/astrapro_out_of_box/src
//
// Created by qjfen on 2024/1/19.
//
#include "stdio.h"
#include <cstring> // memset
#include <iostream> // std::cout
#include "m_device.h"
#include <opencv2/opencv.hpp>
#include <OpenNI.h>
int handle;
cv::VideoCapture g_RgbCap;
openni::VideoStream** m_streams;
openni::Device device;
openni::VideoStream streamDepth;
const char* deviceURI = openni::ANY_DEVICE;
#define SAMPLE_READ_WAIT_TIMEOUT 2000 //2000ms
m_device::m_device()
{
//ctor
}
m_device::~m_device()
{
//dtor
}
m_device& m_device::getInstance()
{
static m_device instance;
return instance;
}
int m_device::init(int handle_index)
{
int ret;
handle = handle_index;
openni::Status rc = openni::STATUS_OK;
rc = openni::OpenNI::initialize();
printf("After initialization:\n%s\n", openni::OpenNI::getExtendedError());
return 0;
}
int m_device::open()
{
int ret;
g_RgbCap = cv::VideoCapture(0);
if (!g_RgbCap.isOpened()) {
std::cout << "Failed to open camera!" << std::endl;
return -1;
}
openni::Status rc = openni::STATUS_OK;
rc = device.open(deviceURI);
if (rc != openni::STATUS_OK) {
printf("SimpleViewer: Device open failed:\n%s\n", openni::OpenNI::getExtendedError());
openni::OpenNI::shutdown();
return 1;
}
rc = streamDepth.create(device, openni::SENSOR_DEPTH);
if (rc == openni::STATUS_OK) {
rc = streamDepth.start();
if (rc != openni::STATUS_OK) {
printf("SimpleViewer: Couldn't start depth stream:\n%s\n", openni::OpenNI::getExtendedError());
streamDepth.destroy();
}
} else {
printf("SimpleViewer: Couldn't find depth stream:\n%s\n", openni::OpenNI::getExtendedError());
}
openni::VideoMode depthVideoMode;
int m_width;
int m_height;
if (!streamDepth.isValid()) {
printf("SimpleViewer: No valid streams. Exiting\n");
openni::OpenNI::shutdown();
return 2;
} else {
depthVideoMode = streamDepth.getVideoMode();
m_width = depthVideoMode.getResolutionX();
m_height = depthVideoMode.getResolutionY();
}
m_streams = new openni::VideoStream*[1];
m_streams[0] = &streamDepth;
return 0;
}
int m_device::close()
{
int ret;
g_RgbCap.release();
streamDepth.stop();
streamDepth.destroy();
device.close();
openni::OpenNI::shutdown();
return 0;
}
int m_device::recvFrame(cv::Mat* mat_rgb, cv::Mat* mat_depth)
{
cv::Mat frameRgb;
g_RgbCap.read(frameRgb); // Capture a frame
if (frameRgb.empty()) {
std::cout << "Failed to read frame!" << std::endl;
return -1;
}
*mat_rgb = frameRgb.clone();
openni::VideoFrameRef frameDepth;
int changedIndex;
openni::Status rc = openni::OpenNI::waitForAnyStream(m_streams, 1, &changedIndex, SAMPLE_READ_WAIT_TIMEOUT);
if (rc != openni::STATUS_OK) {
printf("Wait failed\r\n");
return -1;
}
rc = streamDepth.readFrame( &frameDepth );
if (rc != openni::STATUS_OK) {
printf("Read failed!\r\n");
return -1;
}
int iMaxDepth = streamDepth.getMaxPixelValue();
const cv::Mat mImageDepth( frameDepth.getHeight(), frameDepth.getWidth(), CV_16UC1, (void*)frameDepth.getData());
cv::Mat mScaledDepth;
mImageDepth.convertTo( mScaledDepth, CV_8U, 255.0 / iMaxDepth );
cv::Mat flipped_horizontal;
cv::flip(mScaledDepth, flipped_horizontal, 1);
*mat_depth = flipped_horizontal.clone();
return 0;
}4.2 m_device.h
把m_device.h放到 ~/workspace/astrapro_out_of_box/include/
#ifndef __M_DEVICE_H
#define __M_DEVICE_H
#define device_inst m_device::getInstance()
#include "stdint.h" // uint32_t
#include <opencv2/opencv.hpp>
class m_device {
public:
m_device();
virtual ~m_device();
static m_device& getInstance();
int init(int handle_index);
int open();
int close();
int recvFrame(cv::Mat* mat_rgb, cv::Mat* mat_depth);
protected:
private:
};
#endif //__M_DEVICE_H4.3 demo_device.cpp
把demo_device.cpp放到 ~/workspace/astrapro_out_of_box/demo
#include <stdio.h>
#include <unistd.h> // usleep
#include "m_device.h"
int main(void)
{
printf("[main]device_inst.init...\r\n");
device_inst.init(0);
printf("[main]device_inst.open...\r\n");
device_inst.open();
printf("[main]device_inst.recvFrame...\r\n");
cv::Mat mat_rgb, mat_depth;
int ret;
while(1) {
ret = device_inst.recvFrame(&mat_rgb, &mat_depth);
if (ret>=0) {
if (mat_rgb.empty()) {
printf("Failed to read frame! \r\n");
continue;
}
if (mat_depth.empty()) {
printf("Failed to read frame! \r\n");
continue;
}
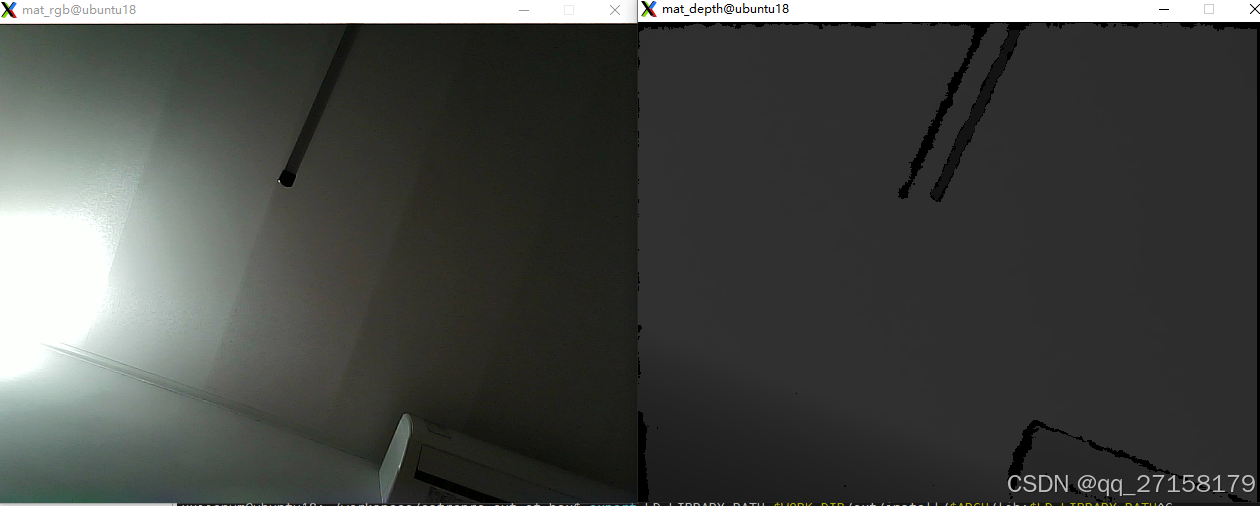
imshow("mat_rgb", mat_rgb);
imshow("mat_depth", mat_depth);
if (cv::waitKey(1) == 'q') break; // Exit on 'q'
}
}
printf("[main]device_inst.close...\r\n");
device_inst.close();
// cv::imwrite("mat_rgb.png", mat_rgb);
// cv::imwrite("mat_depth.png", mat_depth);
// cv::imshow("mat_rgb", mat_rgb);
// cv::imshow("mat_depth", mat_depth);
// cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}4.4 编译
4.4.1 目录结构
4.4.2 环境变量
# 环境变量
cd ~/workspace/astrapro_out_of_box
export WORK_DIR=$PWD
export ARCH="x64"
export C_COMPILER="gcc"
export CXX_COMPILER="g++"
export AR="ar"4.4.3 用户源码编译出库
# 用户源码编译出库
$CXX_COMPILER -c src/*.cpp -Iinclude -Iext/install/$ARCH/include -Lext/install/$ARCH/lib
$AR -r libastra.a *.o
rm *.o4.4.4 编译可执行程序
# 编译可执行程序
$CXX_COMPILER -o demo_device demo/demo_device.cpp -Iext/install/$ARCH/include -Iinclude -L. -Lext/install/$ARCH/lib -lastra -lopencv_core -lopencv_highgui -lopencv_imgproc -lopencv_imgcodecs -lopencv_photo -lopencv_videoio -lopencv_video -lOpenNI24.4.5 运行
# 运行
export WORK_DIR=$PWD
export ARCH="x64"
export LD_LIBRARY_PATH=$WORK_DIR/ext/install/$ARCH/lib:$LD_LIBRARY_PATH
./demo_device