1. 基本信息
树莓派型号:Raspberry Pi 4 Model B
树莓派安装的系统:Ubuntu 22.04
相机型号:MV-CS013-60GN
连接方式: 通过网线连接相机
2. 海康威视相机客户端
2.1 下载
因为树莓派采用的是ARM架构,最新的相机客户端MVS V4.6.0里面没有看到对ARM架构的支持,所以我选择使用客户端 v3.0.1

2.2 上传和安装
在树莓派的终端输入下面的命令查看树莓派是多少位的
bash
uname -m如果输出armv7l代表树莓派32位,如果输出aarch64 代表树莓片是64位,根据实际输出选择上传哪一个:

在树莓派中cd到上传文件的位置,在终端输入安装命令:
bash
dpkg -i MVS-3.0.1_armhf_20241128.deb安装后,文件会在/opt/MVS目录下,示例代码和开发文档都可以在这找到。

3. IP地址
因为是通过网线连接相机,所以需要保证树莓派的以太网接口地址和相机在同一个网段。
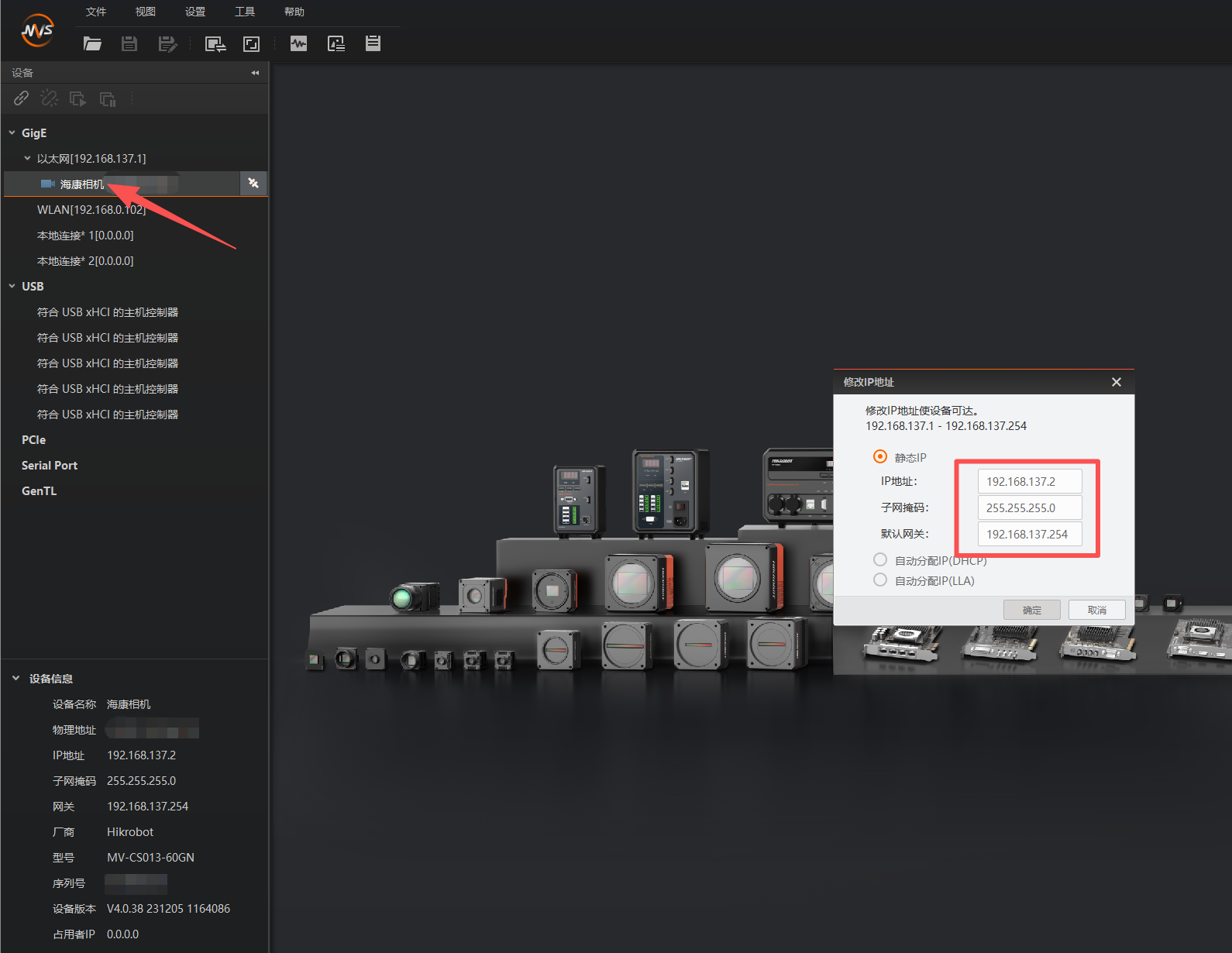
3.1 相机的IP地址通过PC上的海康威视软件进行设置
3.2 给树莓派以太网接口配置IP
bash
# 确保接口是UP的
sudo ip link set eth0 up选项1:临时配置:
bash
# 为eth0添加一个静态IP地址(临时配置)
sudo ip addr add 192.168.137.3/24 dev eth0选项2:永久配置
bash
sudo nano /etc/dhcpcd.conf在末尾添加
bash
interface eth0
static ip_address=192.168.1.100/24
# static routers=192.168.1.1 # 如果需要访问外网,才设置网关,直连摄像头时通常不需要
# static domain_name_servers=192.168.1.1 # DNS 通常也不需要保存文件 (Ctrl+O, 回车, Ctrl+X) 并重启树莓派或重启 dhcpcd 服务:
bash
sudo systemctl restart dhcpcd3.3 验证配置
bash
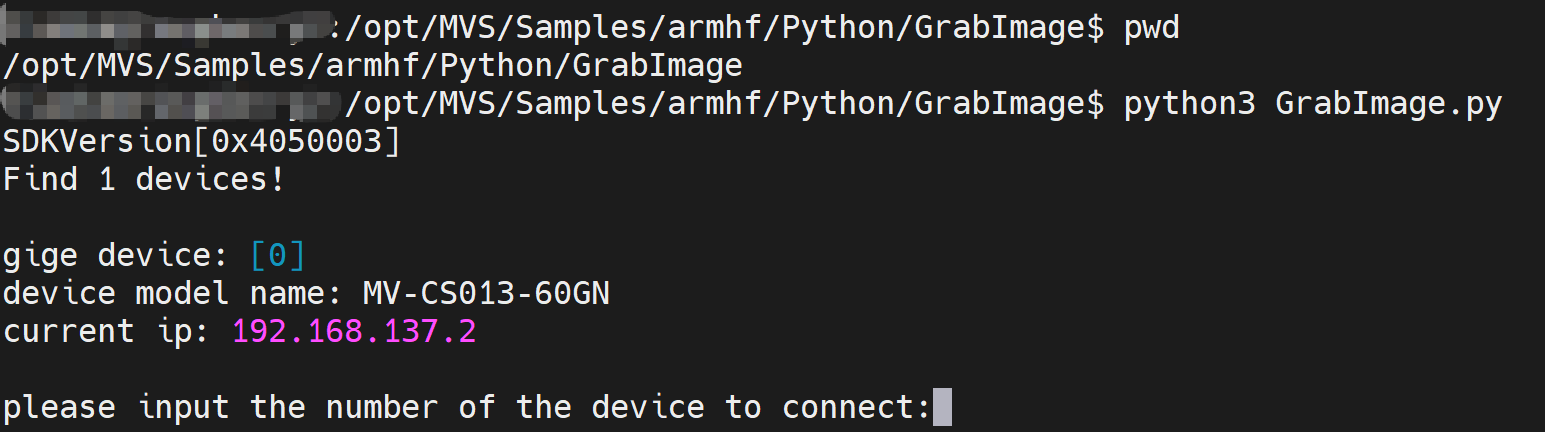
ip addr show eth04 运行示例代码
驱动在安装相机客服端的时候已经被安装好,可以直接测试。
示例代码默认在/opt/MVS/Samples目录下。