理解LineSlam中线段融合部分,里面有很多限制条件,但是比较明显,但是对于线段的Normal,有些不容易理解,因此研究了一下,以下是个人理解,并且记录
其中fuse的代码代码如下(部分自己已经修改,用于LineSlam的工程中):
cpp
int LSDmatcher::Fuse(KeyFrame *pKF, const std::vector<MapLine *> &vpMapLines, const float th)
{
Eigen::Matrix3f Rcw_eigen = pKF->GetRotation();
Eigen::Vector3f tcw_eigen = pKF->GetTranslation();
cv::Mat Rcw = Converter::toCvMat(Rcw_eigen);;
cv::Mat tcw = (Mat_<float>(3, 1) << tcw_eigen(0), tcw_eigen(1), tcw_eigen(2));
const float &fx = pKF->fx;
const float &fy = pKF->fy;
const float &cx = pKF->cx;
const float &cy = pKF->cy;
const float &bf = pKF->mbf;
Eigen::Vector3f Ow_eigen = pKF->GetCameraCenter();
cv::Mat Ow = (Mat_<float>(3, 1) << Ow_eigen(0), Ow_eigen(1), Ow_eigen(2));
int nFused=0;
const int nLines = vpMapLines.size();
// For each candidate MapPoint project and match
for(int iML=0; iML<nLines; iML++)
{
MapLine* pML = vpMapLines[iML];
// Discard Bad MapLines and already found
if(!pML || pML->isBad())
continue;
//Vector6d P = pML->GetWorldPos();
std::pair<Eigen::Vector3f, Eigen::Vector3f> lineWorldPosition = pML->GetLineWorldPos();
cv::Mat SP = (Mat_<float>(3, 1) << lineWorldPosition.first(0), lineWorldPosition.first(1), lineWorldPosition.first(2));
cv::Mat EP = (Mat_<float>(3, 1) << lineWorldPosition.second(0), lineWorldPosition.second(1), lineWorldPosition.second(2));
const cv::Mat SPc = Rcw * SP + tcw;
const auto &SPcX = SPc.at<float>(0);
const auto &SPcY = SPc.at<float>(1);
const auto &SPcZ = SPc.at<float>(2);
const cv::Mat EPc = Rcw * EP + tcw;
const auto &EPcX = EPc.at<float>(0);
const auto &EPcY = EPc.at<float>(1);
const auto &EPcZ = EPc.at<float>(2);
if (SPcZ < 0.0f || EPcZ < 0.0f)
continue;
const float invz1 = 1.0f / SPcZ;
const float u1 = fx * SPcX * invz1 + cx;
const float v1 = fy * SPcY * invz1 + cy;
if (u1 < pKF->mnMinX || u1 > pKF->mnMaxX)
continue;
if (v1 < pKF->mnMinY || v1 > pKF->mnMaxY)
continue;
const float invz2 = 1.0f / EPcZ;
const float u2 = fx * EPcX * invz2 + cx;
const float v2 = fy * EPcY * invz2 + cy;
if (u2 < pKF->mnMinX || u2 > pKF->mnMaxX)
continue;
if (v2 < pKF->mnMinY || v2 > pKF->mnMaxY)
continue;
const float maxDistance = pML->GetMaxDistanceInvariance();
const float minDistance = pML->GetMinDistanceInvariance();
const cv::Mat OM = 0.5 * (SP + EP) - Ow;
const float dist = cv::norm(OM);
if (dist < minDistance || dist > maxDistance)
continue;
// Check viewing angle 这个LineNormal是啥意思?
Eigen::Vector3f Pn = pML->GetLineNormalVector();
cv::Mat pn = (Mat_<float>(3, 1) << Pn(0), Pn(1), Pn(2));
if(OM.dot(pn)<0.5*dist)
continue;
const int nPredictedLevel = pML->PredictScale(dist, pKF);
const float radius = th*pKF->mvScaleFactors[nPredictedLevel];
const vector<size_t> vIndices = pKF->GetLinesInArea(u1,v1, u2, v2, radius);
if(vIndices.empty())
continue;
const cv::Mat dML = pML->GetLineDescriptor();
int bestDist=INT_MAX;
int bestIdx =-1 ;
for(unsigned long idx : vIndices)
{
const int &klLevel = pKF->mvKeyLines[idx].octave;
if(klLevel<nPredictedLevel-1 || klLevel>nPredictedLevel)
continue;
const cv::Mat &dKF = pKF->mLineDescriptors.row(idx);
const int dist = DescriptorDistance(dML,dKF);
if(dist<bestDist)
{
bestDist = dist;
bestIdx = idx;
}
}
if(bestDist<=TH_LOW)
{
MapLine* pMLinKF = pKF->GetMapLine(bestIdx);
if(pMLinKF)
{
if(!pMLinKF->isBad()) {
if(pMLinKF->Observations()>pML->Observations())
pML->Replace(pMLinKF);
else
pMLinKF->Replace(pML);
}
}
else
{
pML->AddLineObservation(pKF,bestIdx);
pKF->AddMapLine(pML,bestIdx);
}
nFused++;
}
}
return nFused;
}本来对于这段代码pML->GetLineNormal();,没有那么好理解,因此记录
先分析它附近的代码,如下:
cpp
// Check viewing angle 这个LineNormal是啥意思?
Eigen::Vector3f Pn = pML->GetLineNormalVector();
cv::Mat pn = (Mat_<float>(3, 1) << Pn(0), Pn(1), Pn(2));
if(OM.dot(pn)<0.5*dist)
continue;🧠 背景:MapLine 与其法向量 (Normal)
在 ORB-SLAM 或 LSD-SLAM 系列中,每个 MapLine(世界坐标系下的线段) 都维护了一条空间线的信息:
-
起点 P1
-
终点 P2
-
平均观测方向
(normal vector)Pn
而 GetLineNormal() 返回的 Pn 是线段的平均观测方向法向量,用来判断当前相机是否处在这条线的"前方"或"后方"。

判断逻辑
cpp
if (OM.dot(pn) < 0.5 * dist)
continue;这行的作用是:
判断当前相机视角是否位于线段的可观测半空间内
解释:
- OM.dot(pn) 表示相机中心到线段中点方向 与 线段平均法向量之间的夹角。
- 若点积过小,说明相机与线段法向量方向几乎相反(即在线段背面),该线在当前视角下不可见或方向反转。
- 阈值 0.5 * dist 是一个启发式条件,过滤掉大角度背向的线条。
直观理解:
- 假设线段像一根小棍子,
- 法向量 Pn 表示线段"朝向相机的方向";
- OM 是相机到这根棍子的位置方向;
- 点积较大 → 说明相机正看向线段;
- 点积较小 → 说明相机在反方向或斜后方,线段不可见
其中线段
这正是理解线特征几何一致性的关键之一。
在 ORB-SLAM / PL-SLAM / Line3D++ 等系统中,
MapLine::GetLineNormal() 所返回的 法向量 (normal, 它的变量为:mNormalVector)(这点非常重要)
并不是线段本身的方向向量 ,而是它的平均观测方向(Viewing Direction) 。
我们来分两步说明:
一、Normal 在 MapLine 中的含义
在 ORB-SLAM 的点特征中,MapPoint 存储一个 mNormalVector,
用于表示从地图点指向所有观测该点的相机的平均方向。
线特征(MapLine )也同理:
当某个关键帧观测到这条线段时,线段在世界坐标下的中点记作 Pc ;相机在世界坐标下的位置记作 Ow ;
从线段到相机的方向为:
每次有新的关键帧观测该线段,就把这个方向向量累积:
然后归一化:

这就是 mNormalVector ------ "线段的平均观测方向"
通常在 ORB-SLAM 或基于它**(典型 MapLine::UpdateNormalAndDepth)**的系统中,这样写:
cpp
void MapLine::UpdateNormalAndDepth()
{
if (mbBad)
return;
std::map<KeyFrame*, std::tuple<int, int>> observations;
{
std::unique_lock<std::mutex> lock(mMutexFeatures);
observations = mLineObservations;
}
if (observations.empty())
return;
cv::Mat normal = cv::Mat::zeros(3, 1, CV_32F);
int n = 0;
for (auto &obs : observations)
{
KeyFrame* pKF = obs.first;
if (pKF->isBad())
continue;
// 相机中心
cv::Mat Ow = pKF->GetCameraCenter();
// 世界坐标下线段起点与终点
Eigen::Vector3f SP, EP;
std::tie(SP, EP) = GetLineWorldPos();
cv::Mat Pc = (cv::Mat_<float>(3,1) <<
0.5f*(SP(0)+EP(0)),
0.5f*(SP(1)+EP(1)),
0.5f*(SP(2)+EP(2)));
cv::Mat v = Ow - Pc;
v = v / cv::norm(v);
normal += v;
n++;
}
mNormalVector = normal / static_cast<float>(n);
mNormalVector = mNormalVector / cv::norm(mNormalVector);
}拓展:其中GetLineNormal() ,它的返回值为mNormalVector在其它方面有用,见下图
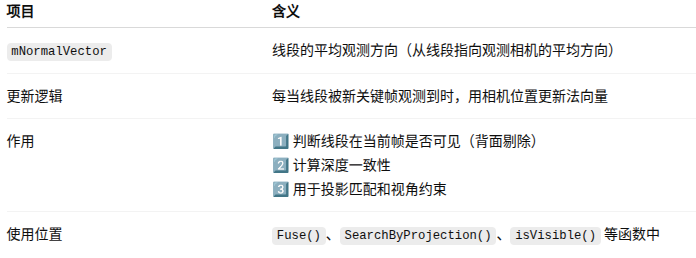
希望对大家有用