前言:在嵌入式系统中,编码器(Encoder) 是一种常见的位置与速度检测装置。它能将轴的机械旋转信号转化为电信号输出,从而实现对旋转角度、转速的测量。
在本篇文章中,我们将使用 STM32F103C8T6 的 定时器(TIM)编码器模式 来读取编码器的旋转方向与脉冲计数值,并在显示屏上实时显示角度或速度。
一、STM32 TIM 编码器模式介绍
STM32 的定时器(TIM1~TIM4)中,部分定时器支持 编码器接口模式(Encoder Interface Mode)。该模式可以自动根据 A、B 相信号完成计数方向识别和计数操作,无需手动外部中断检测。
编码器模式的 3 种配置方式:
TIMx_SMCR 寄存器中的 SMS2:0 位用于选择编码器接口模式:

一般情况下,我们使用 Encoder Mode 3,既能对 A、B 两路边沿进行检测,也能自动判断正反转方向。
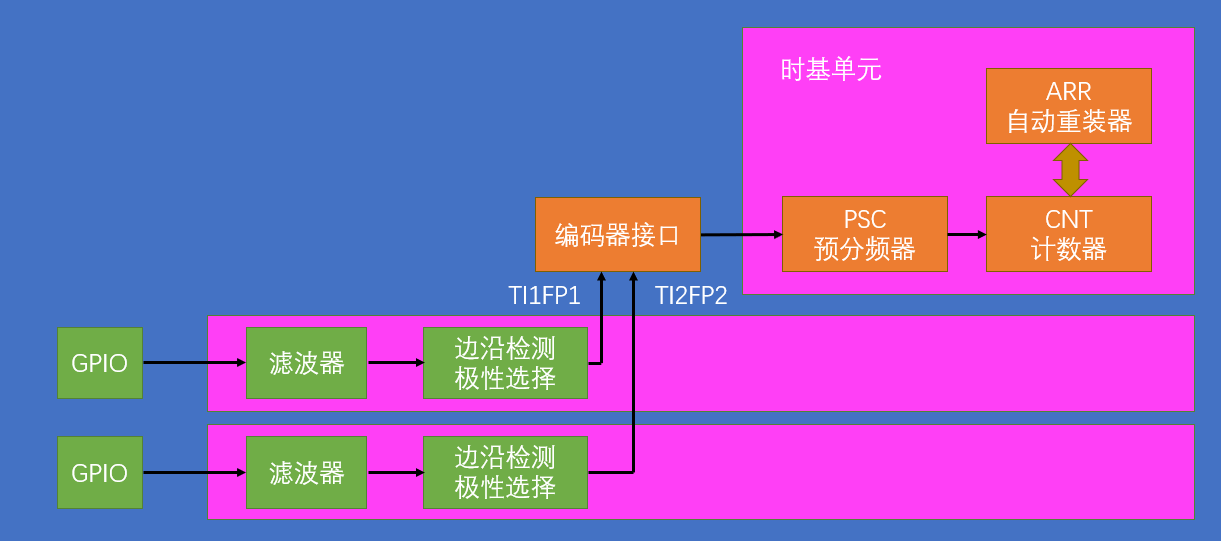
1.编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度。
2.每个高级定时器和通用定时器都拥有1个编码器接口。
3.两个输入引脚借用了输入捕获的通道1和通道2。
二、编码器的基本原理
编码器根据输出信号类型可分为:
增量型编码器(Incremental Encoder)
绝对型编码器(Absolute Encoder)
在 STM32 的应用中,最常用的是 增量型编码器。
增量型编码器工作原理
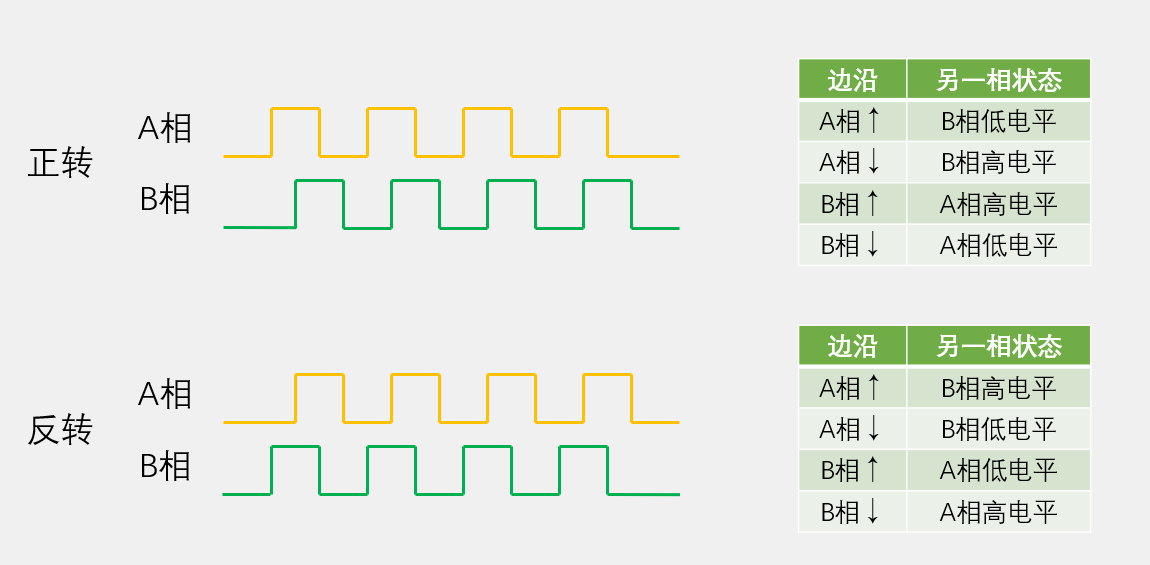
增量型编码器通常输出两路相位相差 90° 的方波信号,称为 A 相 与 B 相。
通过检测 A、B 两路信号的相位关系,可以判断转动方向:

每当编码器旋转一格,A/B 相就会产生一个脉冲。
若一圈输出 1024 个脉冲,则可通过计数得到旋转角度或转速。
三、正交编码器
正交编码器是一种增量式编码器(Incremental Encoder),通过输出两路相位相差 90° 的方波信号 ------ A 相 与 B 相,来表示旋转状态。
接口基本结构:
工作模式:
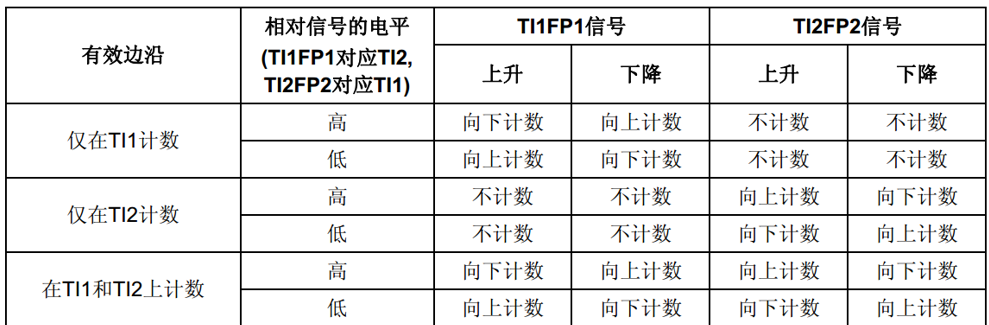
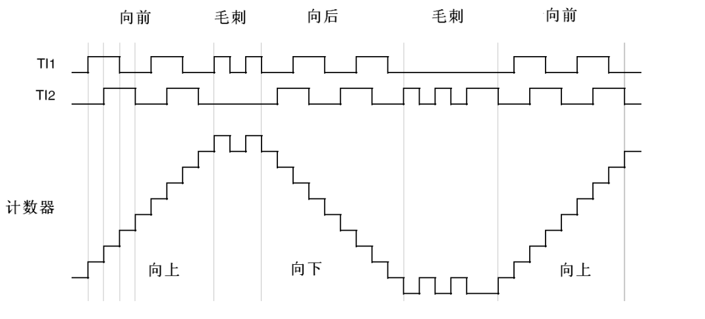
在Tl1和Tl2上计数的模式:
四、优势
1.TIMx 的两个输入通道(CH1、CH2)分别接收 A 相与 B 相信号;
2.硬件自动识别信号相位关系,自动计数并判断方向;
3.程序无需处理中断或手动判相,极大减轻 CPU 负担。
代码部分将在下一章体现。