NI Vision 边缘工具(Edge Tool)是 NI Vision 机器视觉库中用于检测图像边缘的核心工具,通过识别像素值的急剧变化定位边缘,为测量、检测等下游任务提供关键特征信息。
边缘检测逻辑
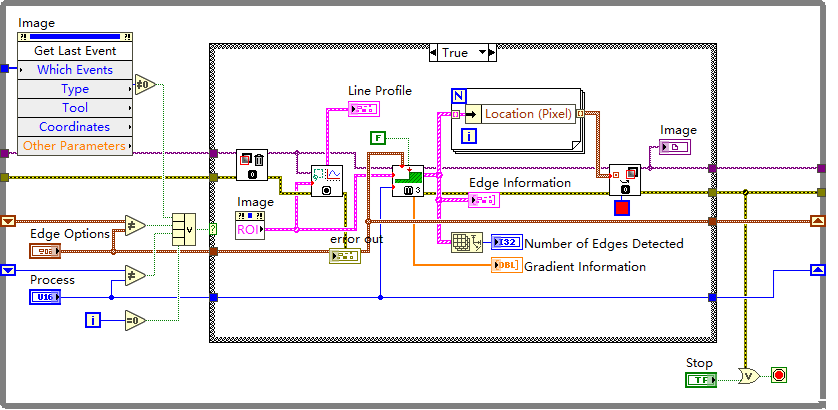
边缘工具的核心原理是识别图像中像素灰度值的突变区域 ------ 当相邻像素的灰度差超过设定阈值时,即判定为边缘。工具通过沿用户指定的 "检测路径"(如直线、ROI 轮廓)逐点分析像素分布,计算灰度梯度(变化率),并结合预设的边缘极性(亮到暗、暗到亮或双向)筛选有效边缘。
检测路径的灵活性是其关键特性:支持直线、多边形等规则 ROI,也可适配自定义轮廓,满足不同场景下的检测需求(如圆形工件的圆周边缘、矩形物体的边沿线)。同时,工具提供 "亚像素级" 检测选项,通过插值算法将边缘定位精度提升至像素尺寸的 1/10 甚至更高,为高精度测量奠定基础。
参数配置
为应对不同图像质量(如噪声、光照不均),边缘工具提供多维度参数调节,确保边缘检测的鲁棒性:
-
阈值控制:包括 "最小边缘强度"(过滤弱边缘)和 "边缘对比度"(设定灰度差阈值),可通过动态调整排除噪声干扰(如反光、污渍导致的伪边缘)。
-
边缘极性筛选:支持指定 "亮→暗"(如物体边缘从背景亮区过渡到前景暗区)、"暗→亮"(反之)或 "双向" 检测,精准匹配目标边缘的灰度变化特征。
-
搜索范围限制:允许设定边缘的预期位置区间(如在 ROI 内划定子区域),减少无效计算,提升检测速度。
-
平滑处理:通过高斯滤波等预处理降低高频噪声对边缘检测的影响,尤其适用于低对比度图像。
输出结果
工具的输出结果包含边缘的关键特征信息,可直接用于后续分析:
-
位置坐标:以像素或亚像素为单位,返回边缘在图像坐标系中的 X、Y 坐标,是尺寸测量的核心数据(如通过两个边缘的距离计算物体宽度)。
-
边缘强度:量化灰度变化的剧烈程度,可用于评估边缘的可靠性(强度过低的边缘可能为噪声,可被标记为无效)。
-
极性信息:记录边缘的灰度变化方向(亮→暗或暗→亮),辅助区分不同类型的边缘(如工件的内边缘与外边缘)。
应用场景
作为机器视觉任务的 "前置工具",边缘工具的输出是诸多下游应用的基础:
-
尺寸测量:在 gauging 应用中,沿预设线轮廓检测物体的上下边缘,通过坐标差计算长度、宽度、厚度等尺寸(如电子元件的引脚间距、金属板材的厚度)。
-
缺陷检测:在表面 inspection 中,通过识别异常边缘判断缺陷(如玻璃表面的裂纹会产生非预期的灰度突变,边缘工具可定位其位置和长度)。
-
定位与对齐:在自动化装配中,通过检测物体的边缘轮廓确定其空间位置,为机器人抓取、部件对齐提供坐标基准。
边缘工具在设计上平衡了检测精度与运算速度:一方面,亚像素级算法满足微米级测量需求;另一方面,通过 ROI 限制、多线程优化等技术,可在工业相机的实时流(如 30fps)中稳定运行,适配生产线的高速检测场景。