本文介绍自动驾驶中的GNSS实践
1、冷启动和热启动
-
冷启动时,车辆静止状态下的定位时长:30s
-
冷启动时,车辆运动状态下的定位时长:几分钟到十几分钟
-
热启动时,车辆静止状态下的定位时长:几秒到十几秒
-
热启动时,车辆运动状态下的定位时长:比几秒到十几秒略长
如何提升冷启动下的定位速度:从ftp服务站ftp://cddis.nasa.gov/gnss/products/可以下载 IGS 提供的精密星历数据。目前 IGS 精密星历主要分为三种:最终精密星历(IGS Final,标识为 IGS)、快速精密星历(IGS Rapid,标识为 IGR)、以及超快速精密星历(IGS Ultra-Rapid,标识为 IGU)。对应的精密钟差也有这三种。其中超快速精密星历又分为观测的部分和预测的部分。
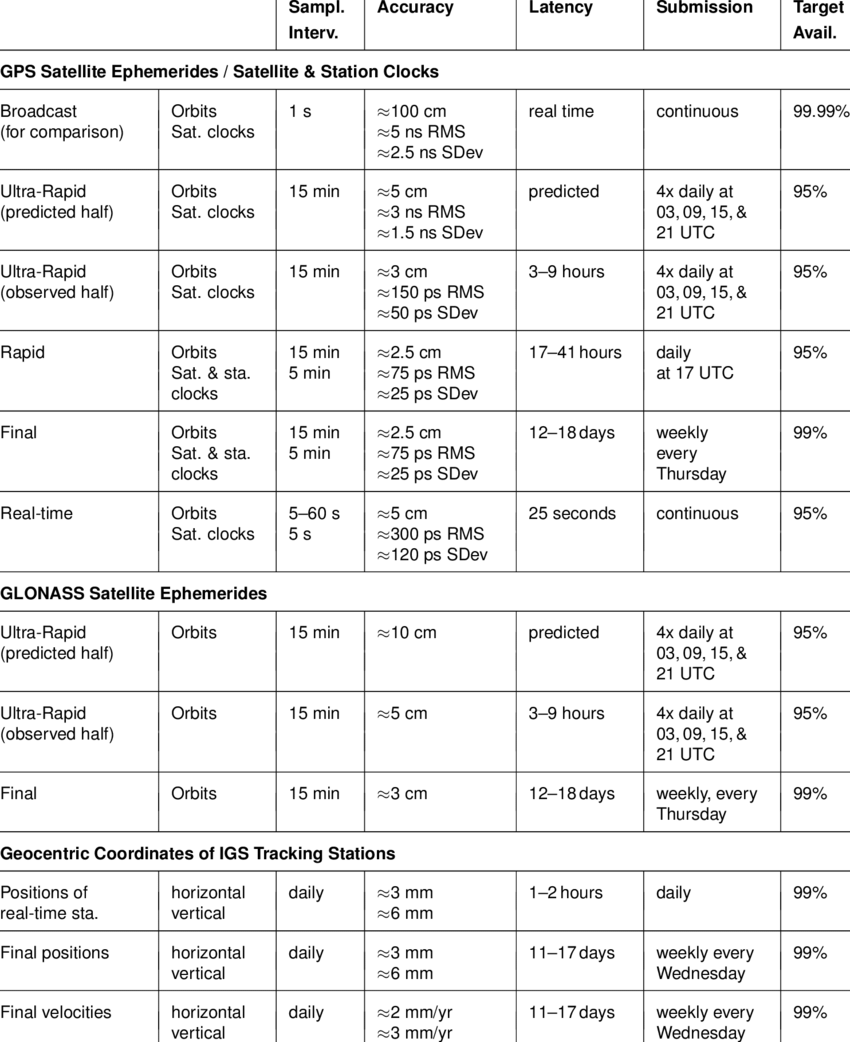
添加图片注释,不超过 140 字(可选)
设置GNSS模组的休眠时间,模组保存的星历可用时间,星历对快速定位有效,星历数据越新,恢复定位越快。
Ref:GPS导航电文解析-CSDN博客
2、灵敏度
捕获灵敏度:基于GSS7000,冷启动下,测试TTFF<300s临界值时的最小接收接收功率;
跟踪灵敏度:基于GSS7000(初始设定为-130dBm),保持12.5minites,然后逐步降低信号功率,1dB/minutes,当功率下降到-150dBm时,看DUT是否不能连接超过5minutes或者5minutes内丢失超过3次;如果DUT还能保持稳定连接,则降低1dBm,重复上述过程;直至DUT不能连接超过5minutes或者5minutes内丢失超过3次,则此时的RF功率加1dBm就是跟踪灵敏度。
重捕获灵敏度:基于GSS7000(初始设定为-130dBm),保持12.5minites,断开GPS卫星模拟器,DUT将丢失连接,降低GSS7000功率到-160dBm,连接上DUT,如果DUT不能在5minutes内连接上,则增高GSS7000的功率1dBm;重复上述过程,直至DUT能在5minutes内连接上,这个值就是重捕获灵敏度。
Ref:GNSS模拟器,更快实现可靠的结果 - GSS7000 - 思博伦
3、精度
速度精度:设备模拟出统一移动场景,打开GNSS,用超级终端记录NMEA log,对比NMEAlog中的速度和设备模拟的速度值设定;
定位精度:设备模拟出统一移动场景,打开GNSS,用超级终端记录NMEA log,对比NMEAlog中的经纬度值和设备的经纬度值设定;
Heading accuracy:设备模拟出统一移动场景,打开GNSS,用超级终端记录NMEA log,对比NMEAlog中的经heading和设备的heading 设定;
4、动态性能
基于 SatGen 生成动态轨迹
-
设定运动模型(如车辆 0--200 km/h、无人机 0--150 km/h、LEO 卫星 7.5 km/s)
-
选择星座组合(GPS L1/L2/L5、GLONASS、Galileo、BeiDou 等)
-
配置信号遮挡、天线增益、噪声、干扰等参数
实地录制(可选)
- 在真实道路/航线使用 LabSat 3 进行现场录制,捕获完整的多星座、全频段信号。此方式可获得最贴近实际的多路径与遮挡特性。
保存场景文件
- SatGen 输出 *.sgc(场景配置)或 *.xml,供后续回放使用。
启动回放:
- 在 LabSat 软件中加载场景文件或录制文件,设定回放速率(可为 1×、2×、5×)以模拟不同动态水平。
同步脉冲:
- SyncBox 发送 100 Hz 脉冲,DUT 通过以太网/串口接收 NMEA,确保定位解算与 RF 信号同步。
记录输出:
- DUT 输出 NMEA、RINEX 或原始观测文件;同时使用 RTCM Broadcaster 将对应的校正信息实时注入 DUT(RTK、DGPS 等模式)。
将NMEA log转为.KML,导入KML文件到google earth中,检查GNSS trajectory。

Ref:https://www.labsat.co.uk/index.php/en/
Ref:https://mb-gps2kml.apponic.com/
5、静态性能
GNSS打开,QXDM和超级终端工具记录下NMEA log,用相关工具分析开阔场景下计算CEP和static drift。
6、TTFF
用QXDM 记录下热态、温态、冷态启动下的GNSS启动时间