timeline:
11月4日开始学,
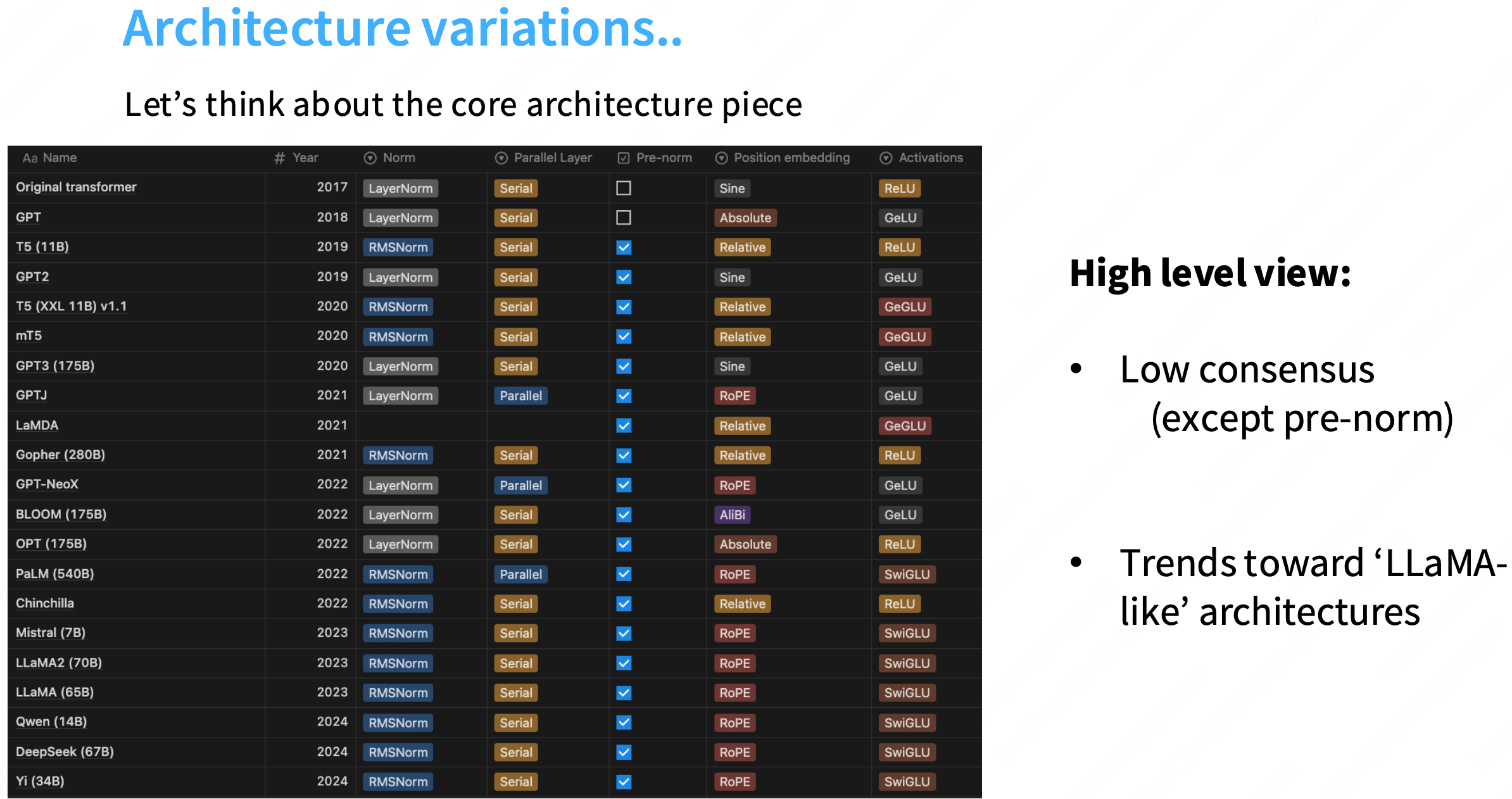
Architectures
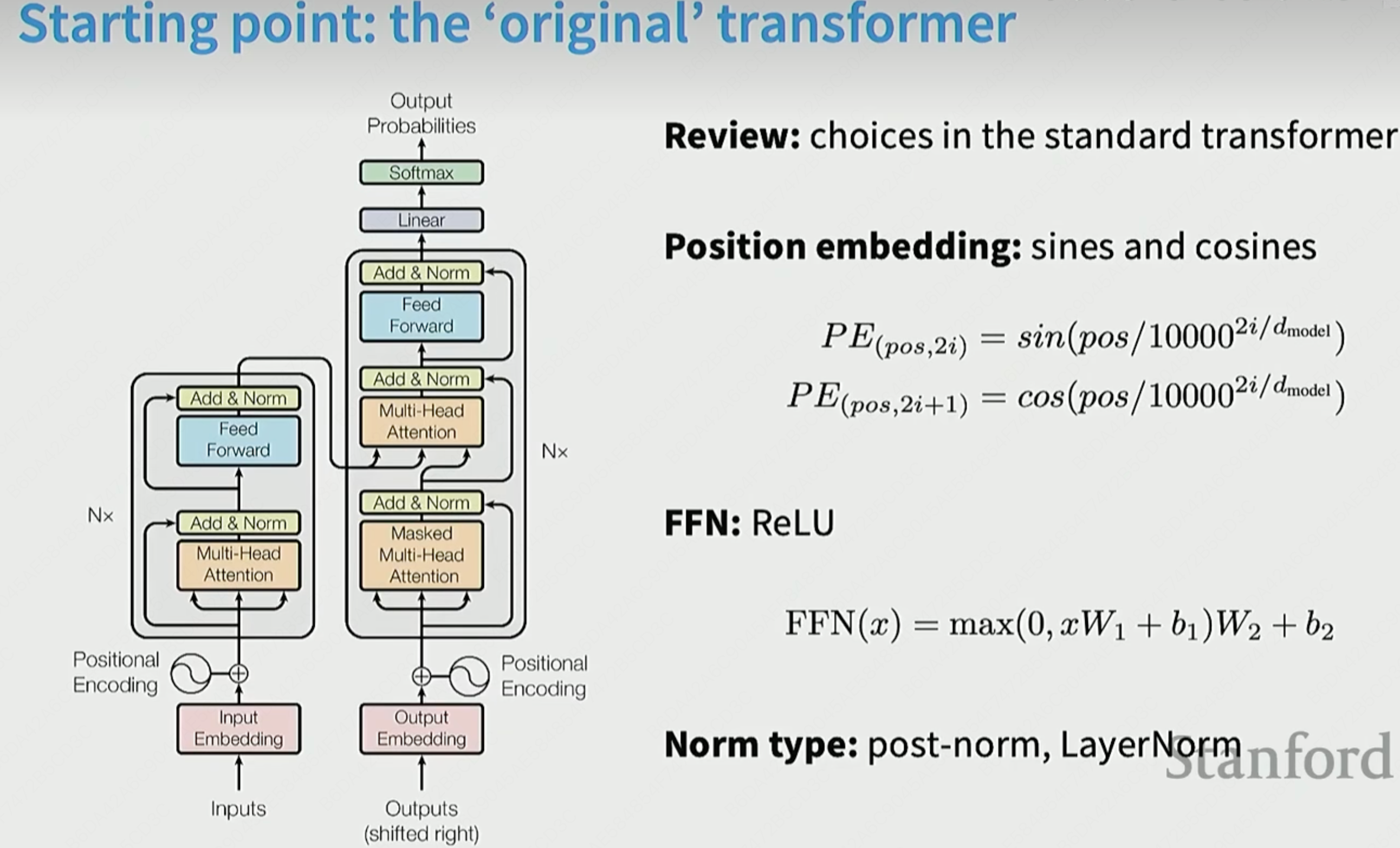
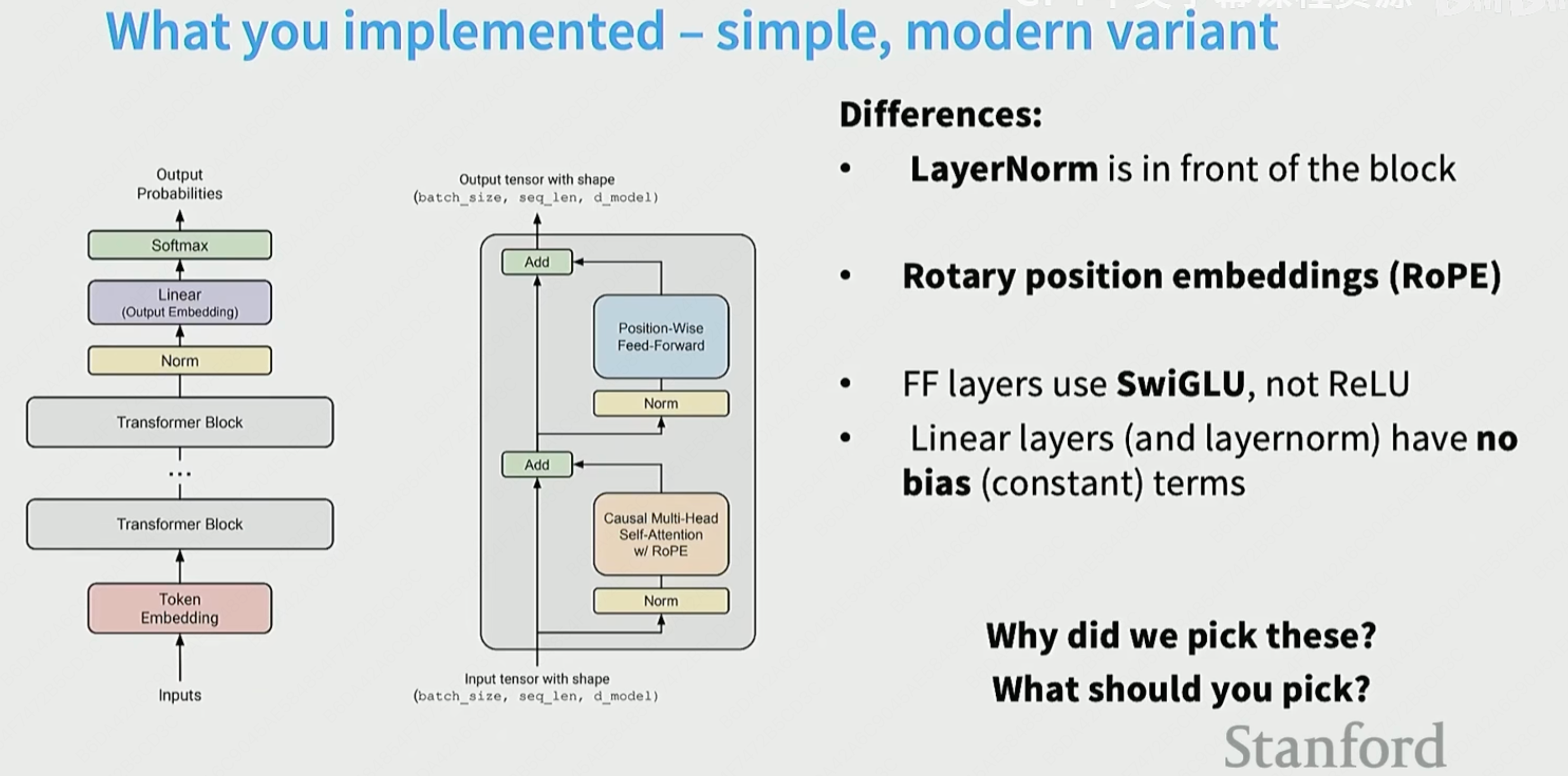
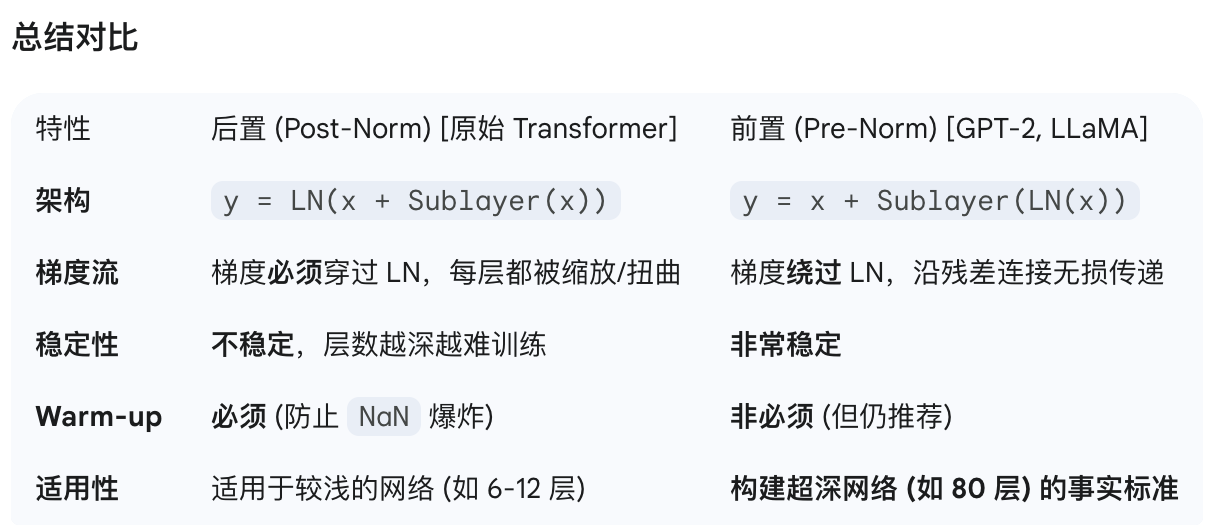
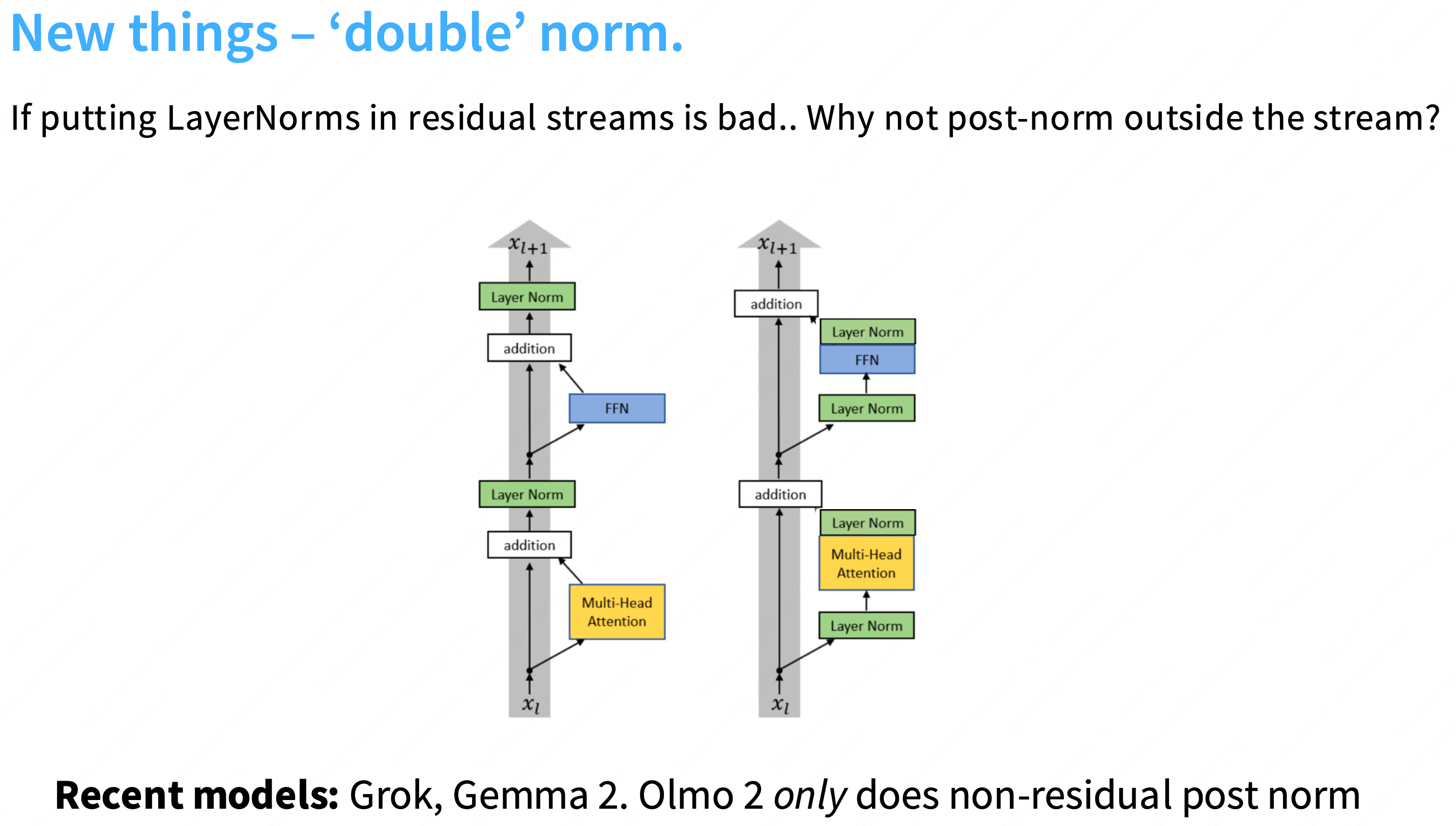
Postnorm vs Prenorm
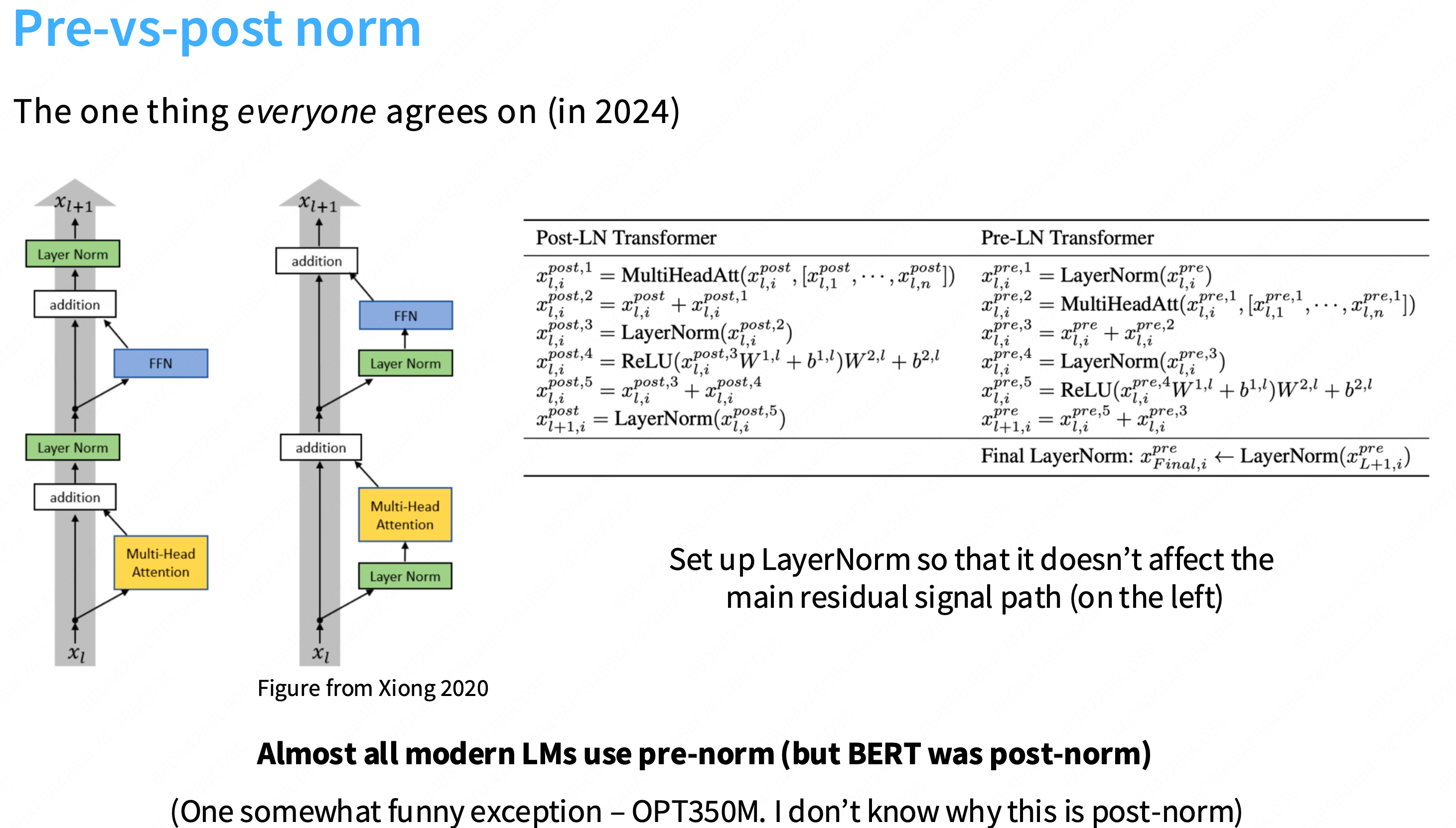
为什么layernorm放在前面更加有效?
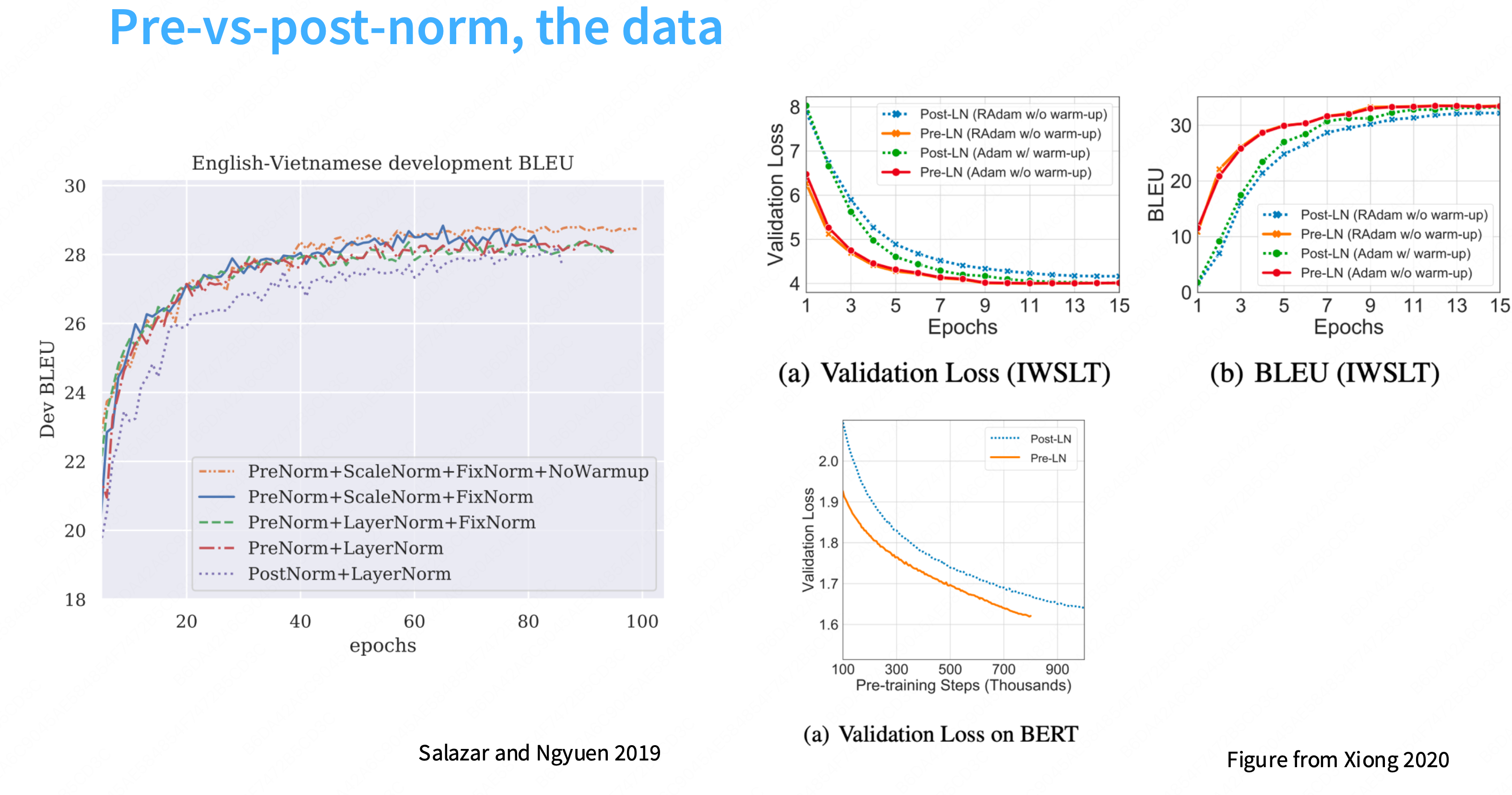
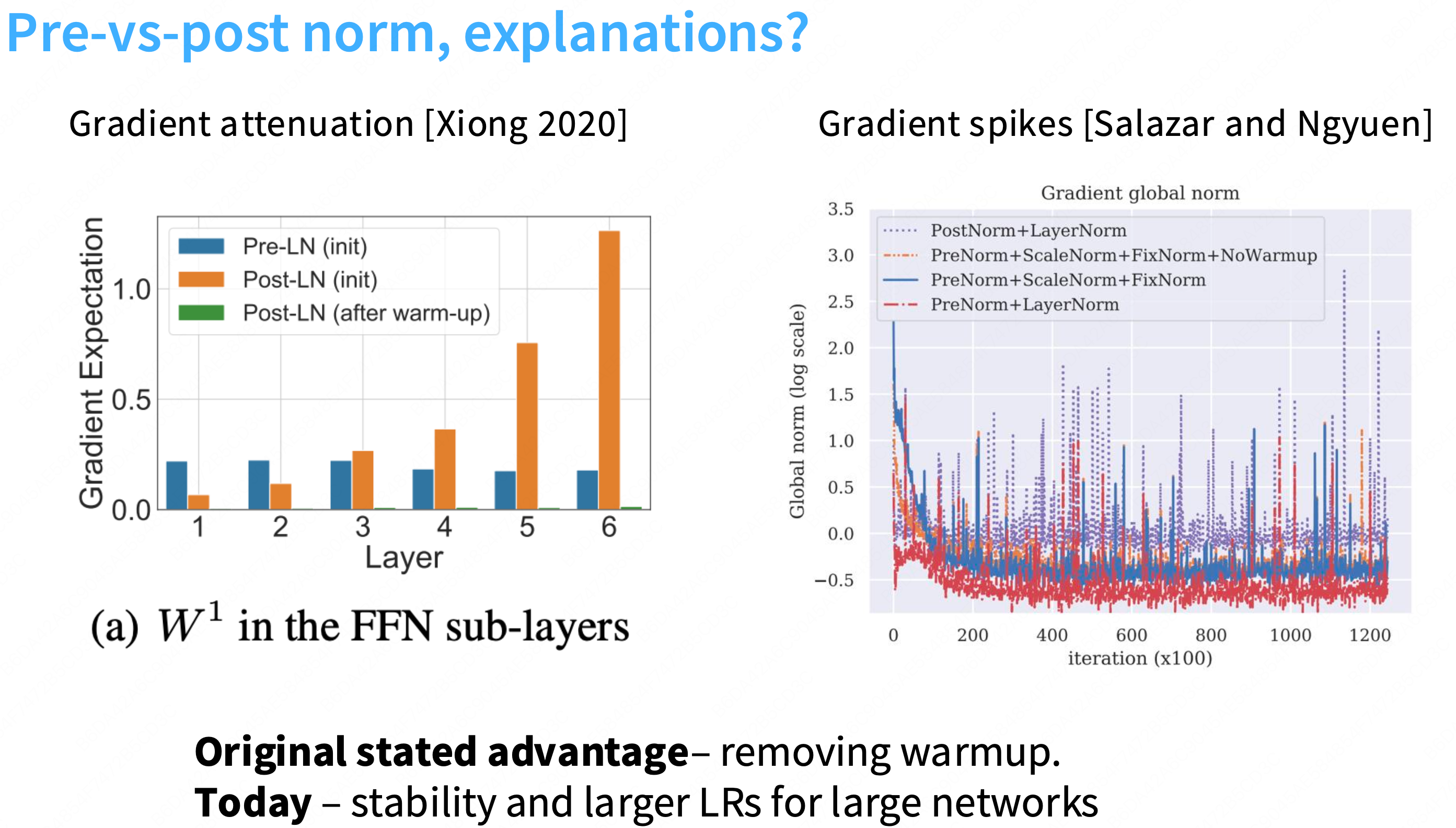
更多的一种解释是:"前置归一化是一个更加稳定的训练架构"。不容易出现梯度尖刺的情况,更加稳定。在残差流中放置layernorm是不好的
++Q: 为什么在残差流中加入layernorm不好?++
a: 一个直观的观点是,残差给你从网络顶部到底部的这种恒等链接,因此,如果你视图训练非常深的网络,这使得梯度传播非常容易,因此,有很多关于lstm和其他状态空间模型在反向传播梯度时困难的讨论,但这种恒等链接没有任何这样的问题,因此,在中间放置layernorm可能会干扰这种梯度行为。
LayerNorm vs RMSNorm
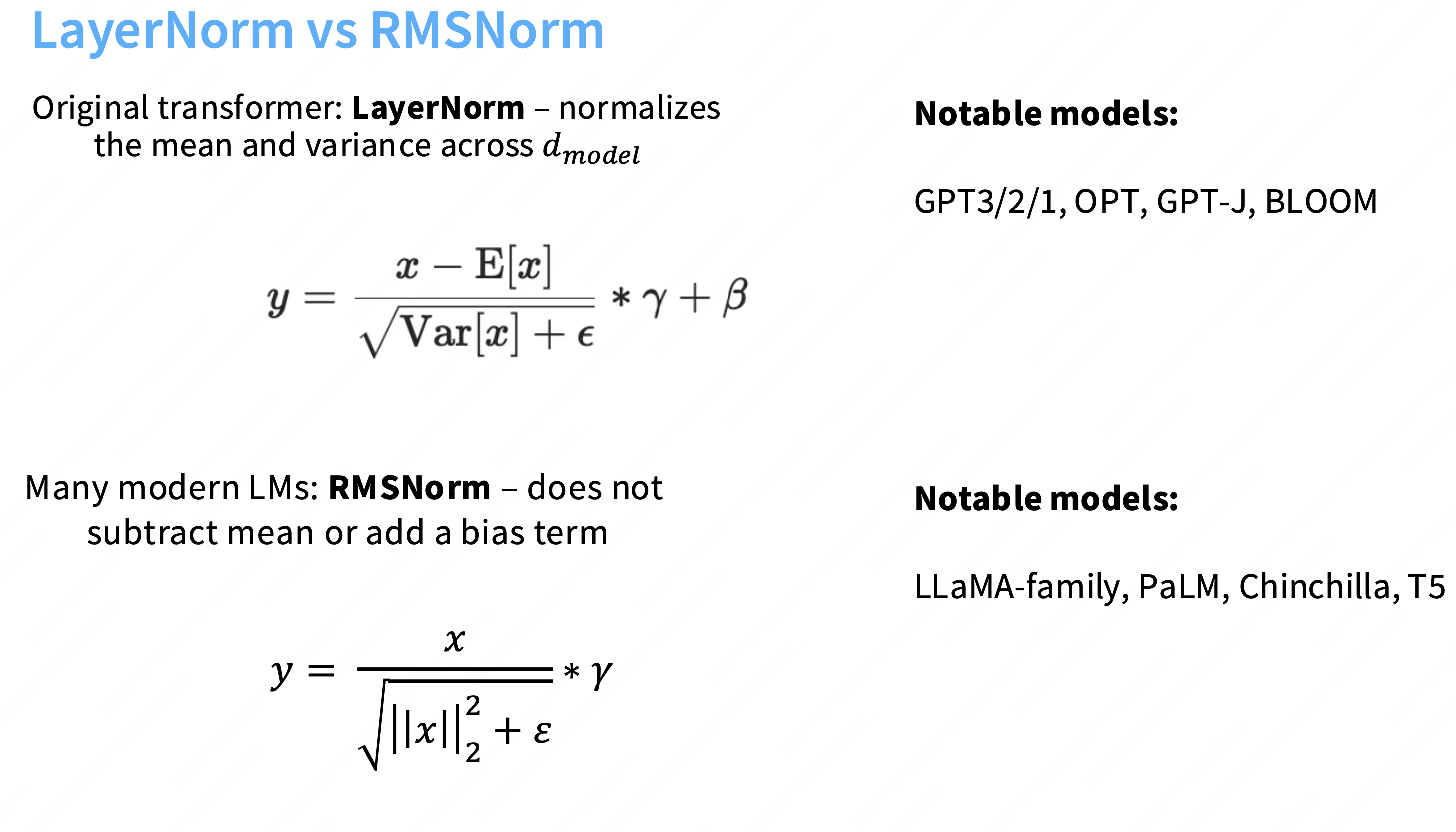
可以简单的认为layernorm就是一个标准差,然后通过一个gamma因子γ放大。
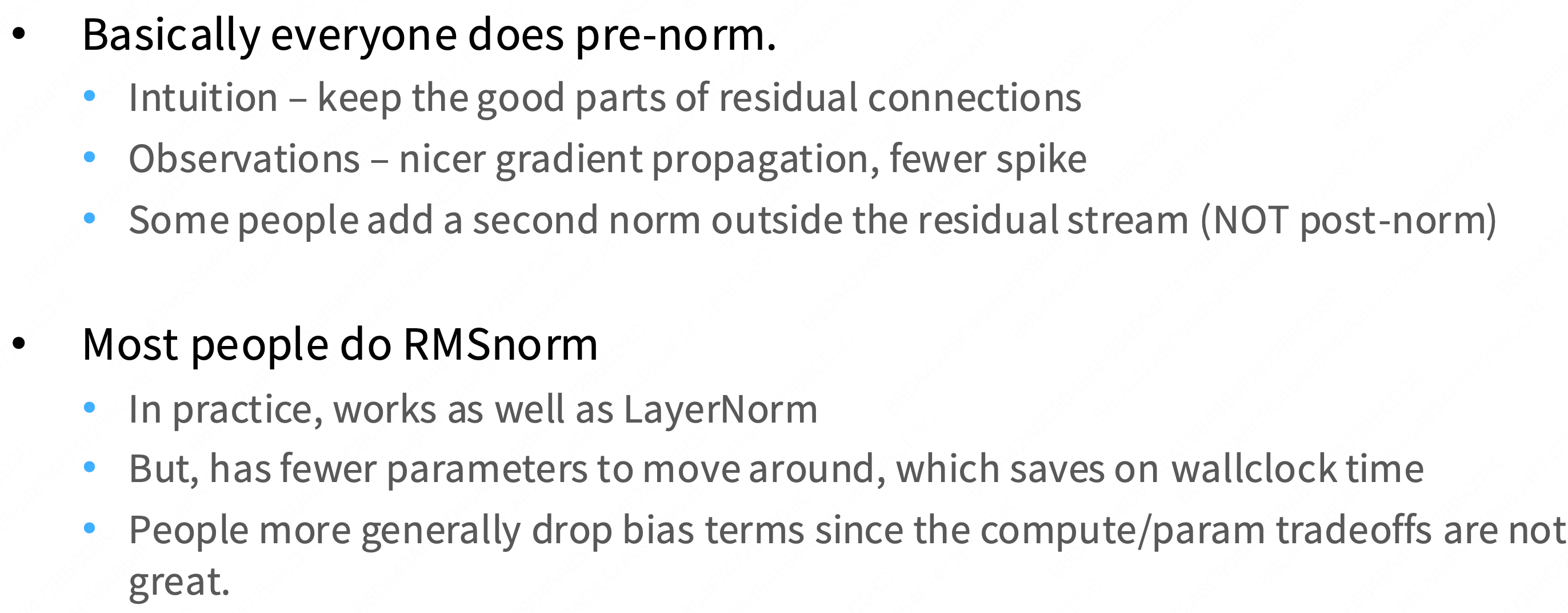
++Q:为什么当前的模型都转向于使用rmsnorm?++
A:因为使用RMSnorm和使用layernorm效果一样好,现代模型(尤其是 LLaMA 系列)偏向于使用 RMSNorm 的最主要、最直接的原因 是:为了提高计算效率(即速度)。
①不需要再减去均值,不必添加bias,需要从内存加载回计算单元的参数就会变少。
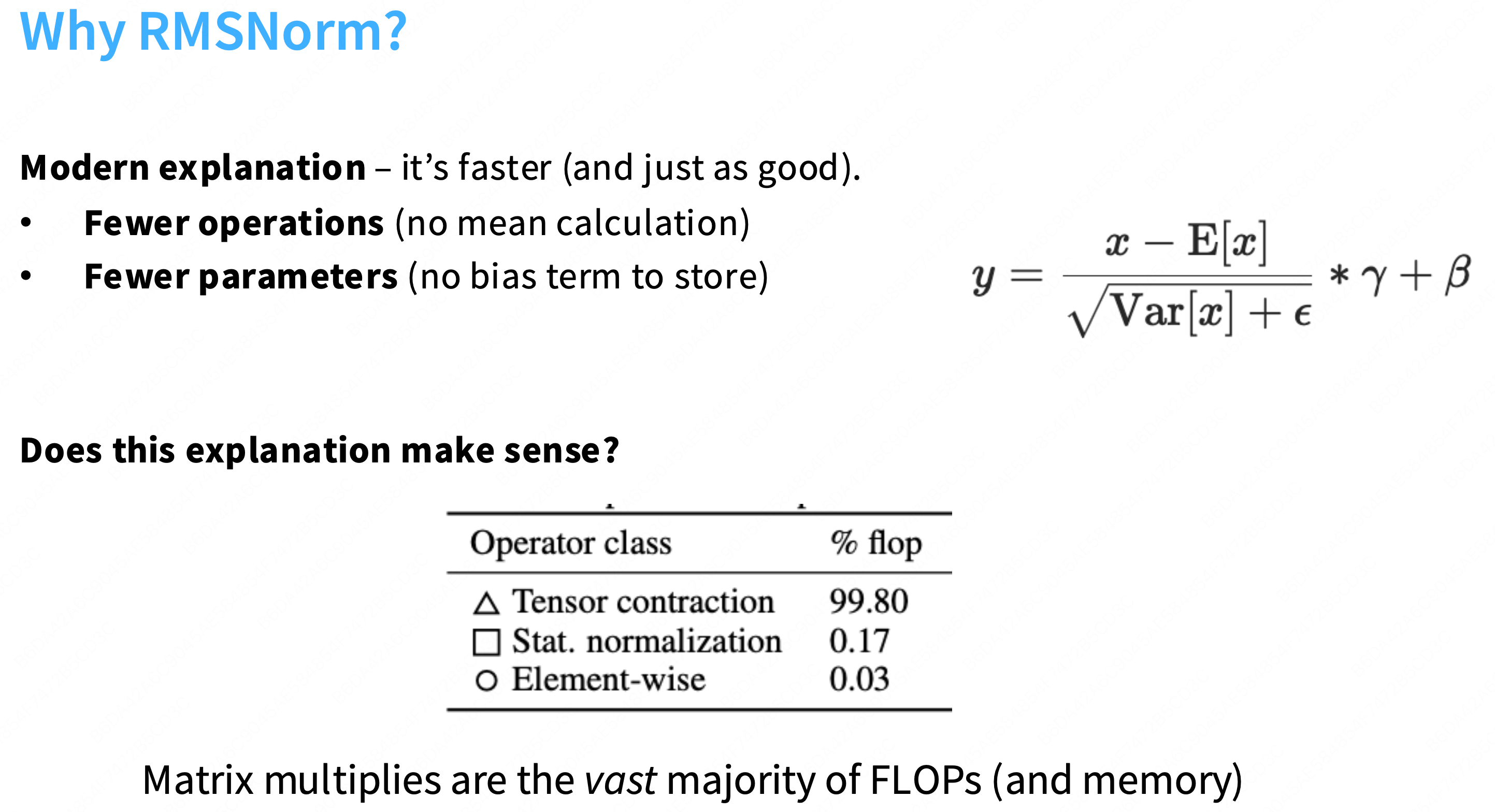
②虽然RMSnorm优化的浮点计算量仅在transformer中占比0.17%,但这并不是唯一需要考虑的。因为计算量flops≠运行时间runtime。还需要仔细的考虑内存移动。
下图可以看到,虽然归一化(如layernorm、softmax等)所占的计算量仅有0.17%,但是实际运行时间占比达到了25%。一个核心原因是:归一化操作仍然会产生大量的内存移动开销,因此优化这些底层的操作十分重要。
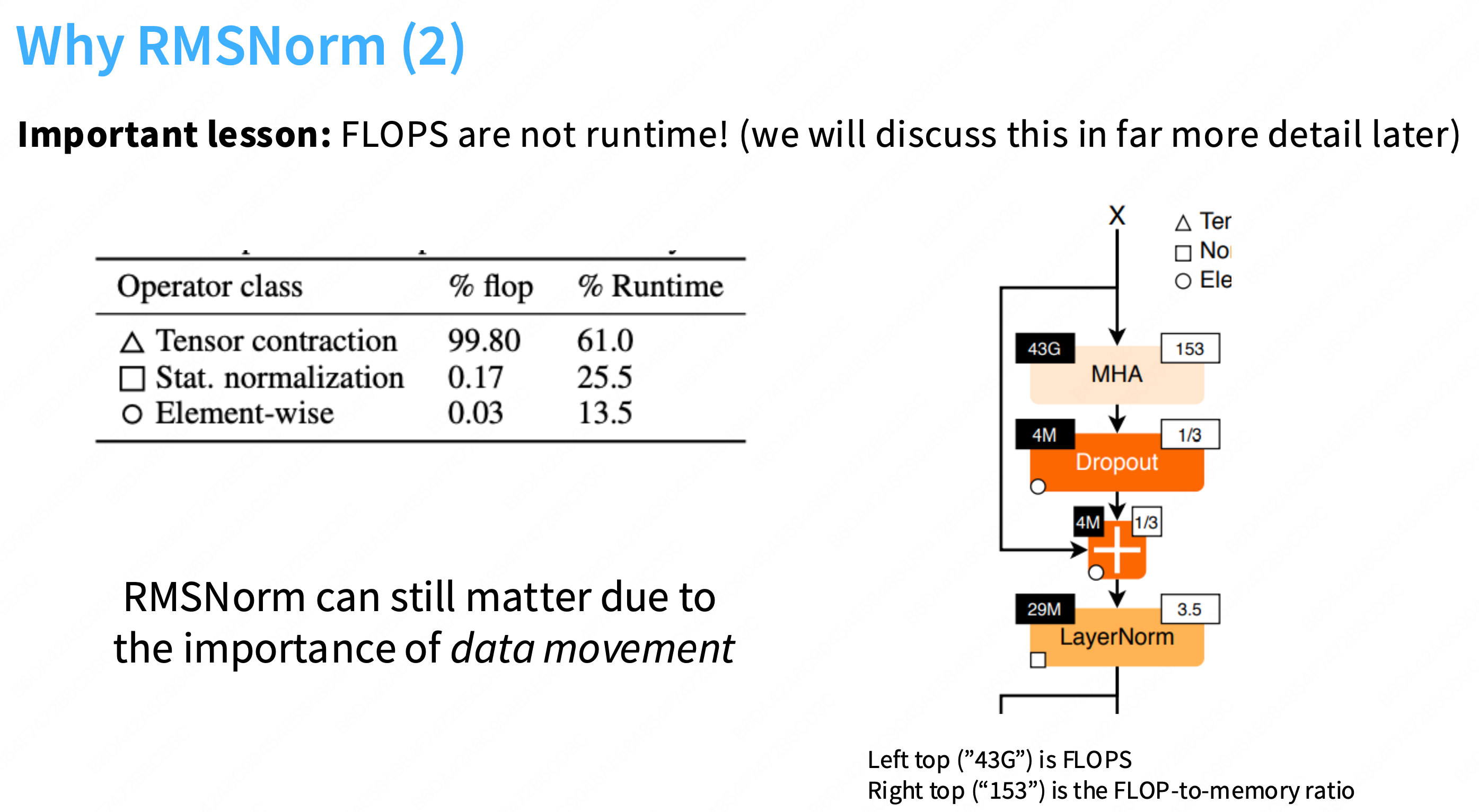
右边这张图有点意思,不仅仅是一个架构图(它展示了 MHA 子层),更是一个性能瓶颈分析图。
核心概念:两大瓶颈
GPU 只有两种工作状态,这由计算强度 (AI) 决定:
计算受限 (Compute-Bound)
高 AI (如
153)含义: 每从显存 (HBM) 中读取 1 字节的数据,GPU 都能执行大量的计算(例如 153 次 FLOPs)。
状态: GPU 的计算核心(Tensor Cores)100% 繁忙 ,而显存正在"休息"。这是理想状态,能实现高 MFU。
内存带宽受限 (Memory-Bound)
低 AI (如
3.5或1/3)含义: 每读取 1 字节,GPU 只能执行很少的计算。
状态: GPU 的计算核心极其空闲 ("挨饿"),大部分时间都在"等待"数据从缓慢的 HBM 显存加载到高速的 SRAM 缓存中。这导致 MFU 极低。
逐一分析图中组件:现在,我们用这个"瓶颈"视角来分析这张图:
a) MHA (Multi-Head Attention)
FLOPs (
43G): 430 亿次运算。这几乎是 这个块的全部计算量 (43G vs 4M+4M+29M)。AI (
153): 极高! 结论: MHA 是**"计算受限 (Compute-Bound)"**的。CS336 关联: 这完全符合我们的推导。MHA 的核心是
Q@K.T和scores@V这样的大型矩阵乘法 (Matmul),它们具有极高的计算强度。这部分是"好"的,能跑满 MFU。b) Dropout 和
+(残差连接)
FLOPs (
4M): 仅 400 万次运算,计算量完全可以忽略不计。AI (
1/3): 极低! (小于 1)结论: 它们是**"内存带宽受限 (Memory-Bound)"**的。
CS336 关联: 这也符合我们的推导。
Dropout和Add都是逐元素 (Element-wise) 操作(图例○)。它们需要从 HBM 读取整个[B, L, D]张量,只做 1 次乘法或加法,再写回 HBM。这是纯粹的 I/O 瓶颈。c) LayerNorm
FLOPs (
29M): 计算量也基本可以忽略不计。AI (
3.5): 非常低!结论: LayerNorm 是**"内存带宽受限 (Memory-Bound)"**的。
这张图用数据可视化了 CS336 中一个的核心性能问题:
一个 Transformer 块 99% 以上的**计算量(FLOPs)**都集中在
MHA和FFN(图中未显示)中。但是,
MHA和FFN并不是 唯一的性能瓶颈。++诸如
LayerNorm,Dropout,Residual Add这样的"辅助"操作,虽然计算量(FLOPs)小到可以忽略,但它们是**严重的"内存带宽受限"**操作。++总的执行时间 = Time(Compute-Bound) + Time(Memory-Bound)。
如果我们的 MFU 很低,很可能不是因为
MHA(43G FLOPs) 运行得慢,而是因为 GPU 的计算核心在空转 ,等待LayerNorm(29M FLOPs) 慢悠悠地从 HBM 读写数据。这精确地解释了为什么我们要痴迷于Kernel Fusion(内核融合) ,以及为什么
RMSNorm(比LayerNorm更快)会成为 LLaMA 的首选。
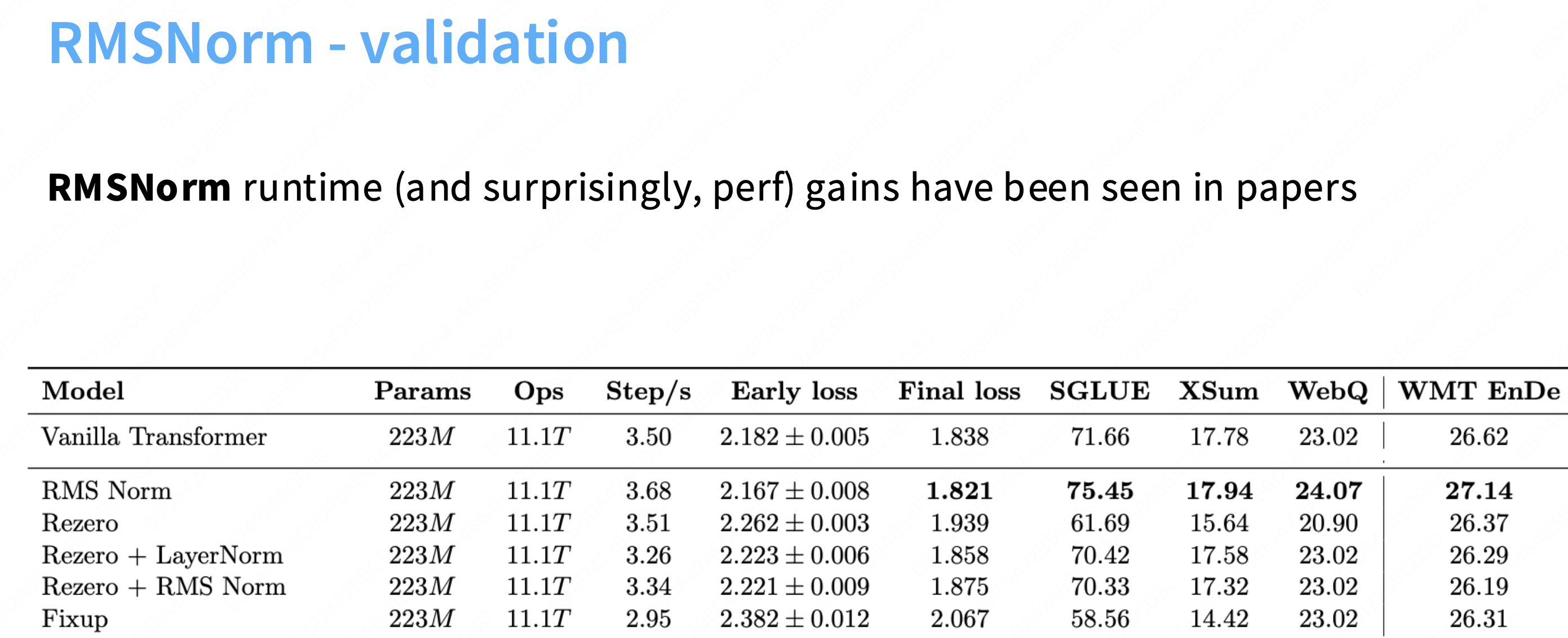
使用rmsnorm之后,step/s增加,final_loss也得到了优化。
去掉bias项
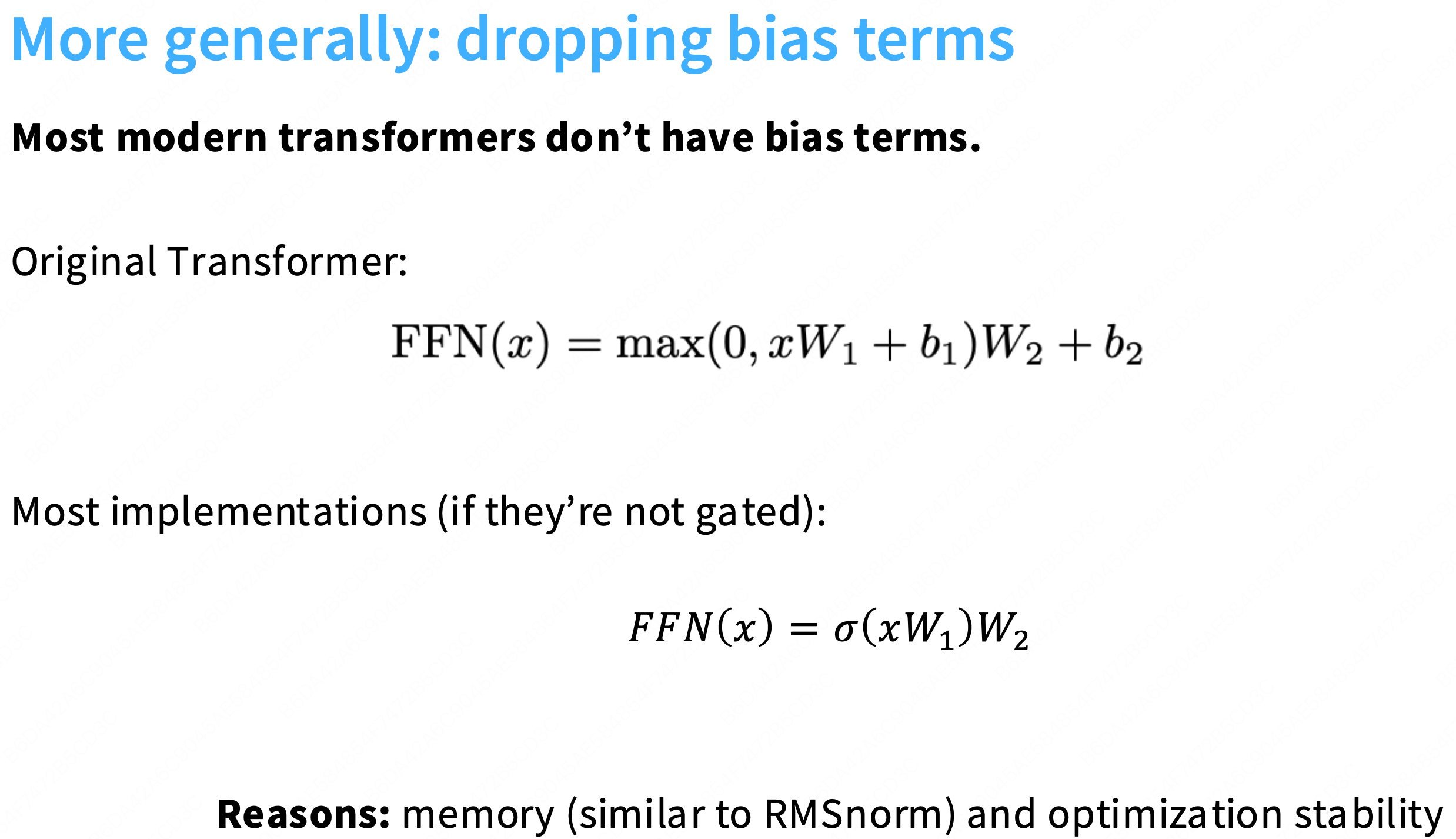
经验上,去掉这些bias通常会稳定这些llm的训练。
layernorm总结
Activations

Gelu可以看到在x=0的附近有一个平滑的凹陷,具有可微性。φx是高斯累积分布函数 CDF。
-
平滑性: 它的曲线处处可导,这被认为能产生更平滑的损失"地形"(Loss Landscape),使优化器(Adam)更容易找到好的解,从而提升训练稳定性和最终性能。
-
非单调: 它在负值区域有轻微的"下凹",允许(并惩罚)负值信息通过,这被认为比 ReLU 的"一刀切"更具表现力。
-
缺点: 计算上比
ReLU昂贵得多(需要计算高斯 CDF)。

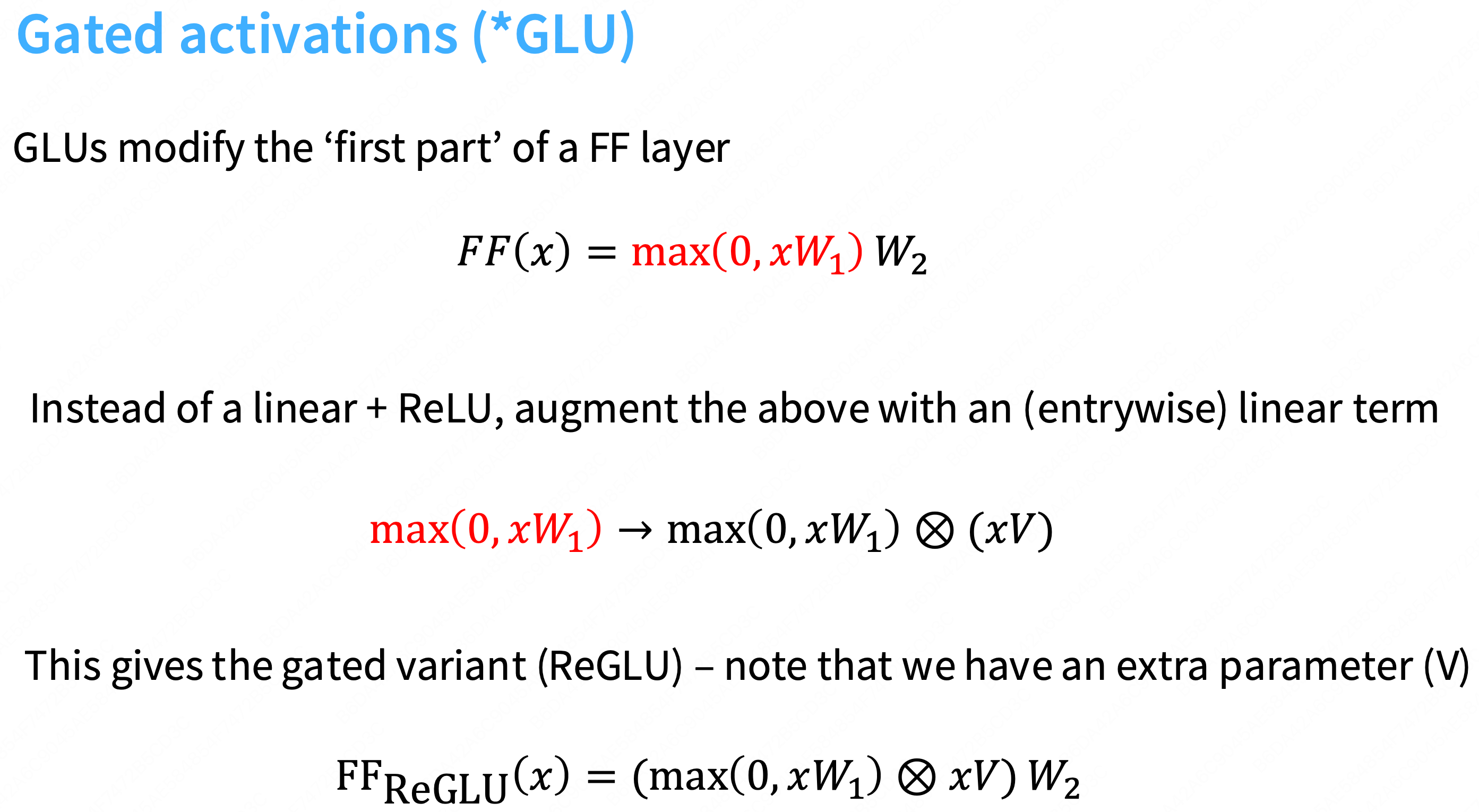
上面的幻灯片展示了(Reglu=relu+glu)的计算流程。
标准 FFN (Standard FFN):
FF(x) = max(0, xW_1) W_2
- 流程:
x经过一个 线性变换W_1,通过ReLU激活,再通过第二个 线性变换W_2。门控 FFN (Gated FFN):
FF_ReGLU(x) = (max(0, xW_1) ⊗ xV) W_2
流程:
x同时 经过两个 并行的线性变换:W_1和V。
xW_1的结果通过ReLU激活。
xV的结果不经过激活(它是一个纯粹的线性项)。"门控 (Gating)" :将前两步的结果进行逐元素乘法 (⊗) 。这个乘法就是"门 (Gate) "。它允许网络动态地、有选择地 控制哪些信息可以流向下一层(类似于 LSTM 中的门控),这被证明比
GeLU的静态激活要强大得多。这个被"门控"后的结果,最后通过第三个 线性变换
W_2。
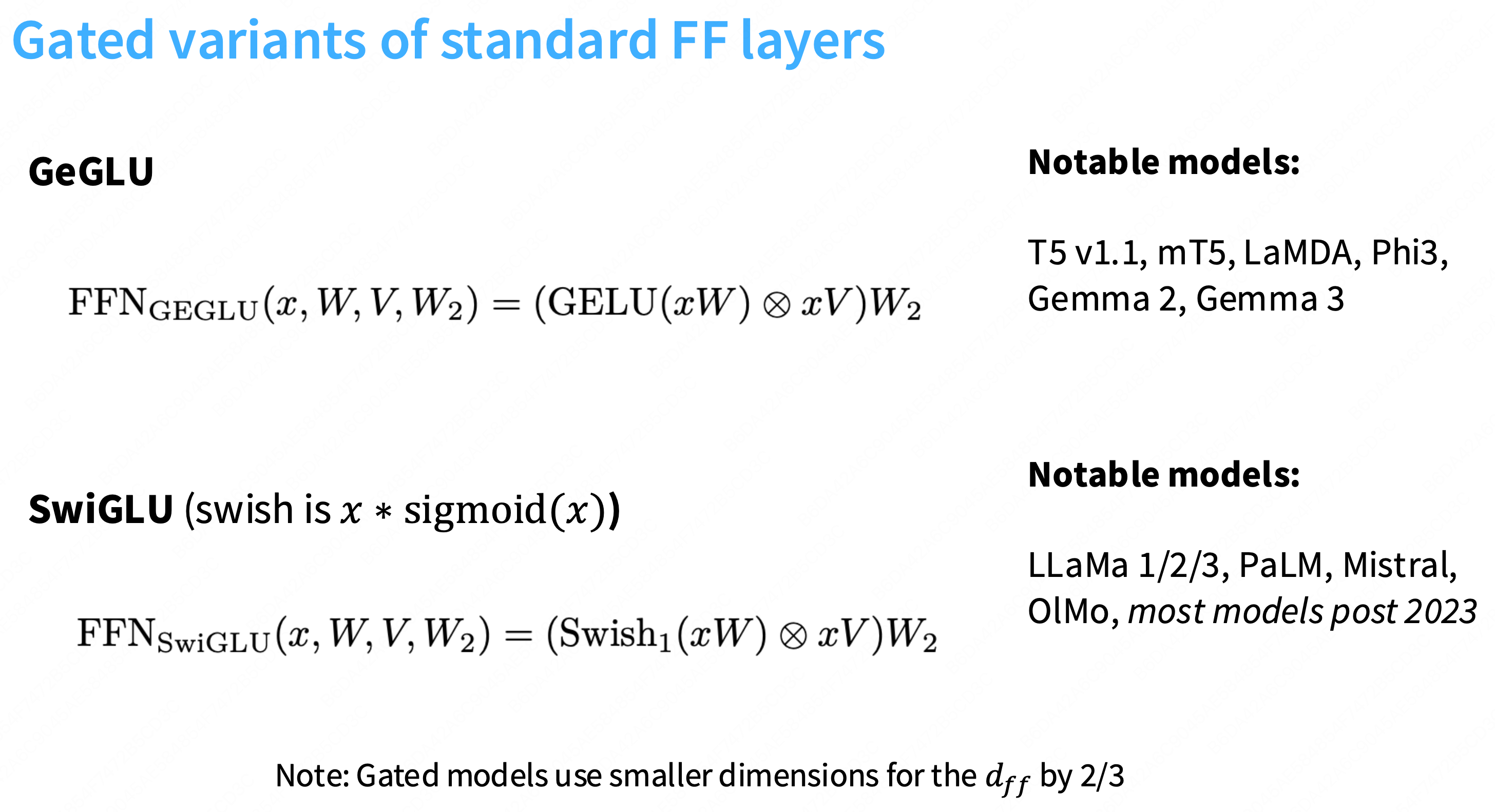
GeGLU就是在ReGLU的基础上,将Relu换成Gelu。SwiGLU就是换成swish+glu。
尽管
SwiGLUFFN(LLaMA 架构)与GeLUFFN(GPT-3 架构)在++总参数量P和总 FLOPs 上被设计为完全相同++ ,但SwiGLU的实际训练速度更慢 。为什么 FLOPs 相同,但速度(time_per_step)更慢? 因为 FLOPs(理论计算量)不等于速度(实际硬件效率 MFU) 。SwiGLU的硬件效率更低,主要源于三个开销:
内核启动开销 (Kernel Launch Overhead):
SwiGLU(3 Matmul + 2 逐元素操作) 需要启动 5 个 GPU 内核。
GeLU(2 Matmul + 1 逐元素操作) 只需要启动 3 个。更多的内核启动 = 更多的固定开销 = 更慢的速度。
内存带宽瓶颈 (Memory-Bound):
SwiGLU增加了一个额外的逐元素乘法(...) ⊗ (...)。这是一个纯粹的内存带宽受限操作。GPU 计算核心在执行此操作时"空转"等待数据,拉低了 MFU。计算强度 (AI) 效率:
GPU Tensor Cores 执行 2 次"胖"的 Matmul (如
[D, 4D]) 的效率(MFU)高于执行 3 次 "瘦"的 Matmul (如[D, 2.67D])。SwiGLU的"瘦" Matmul 导致硬件利用率下降。最终的权衡 (Trade-off): LLaMA 的设计者故意 做出了这个权衡:他们接受了较慢的训练速度(
time_per_step稍高) ,以换取在相同参数预算(P)下更优异的模型质量(更低的 Loss)。

总结:
Serial vs Parallel layers
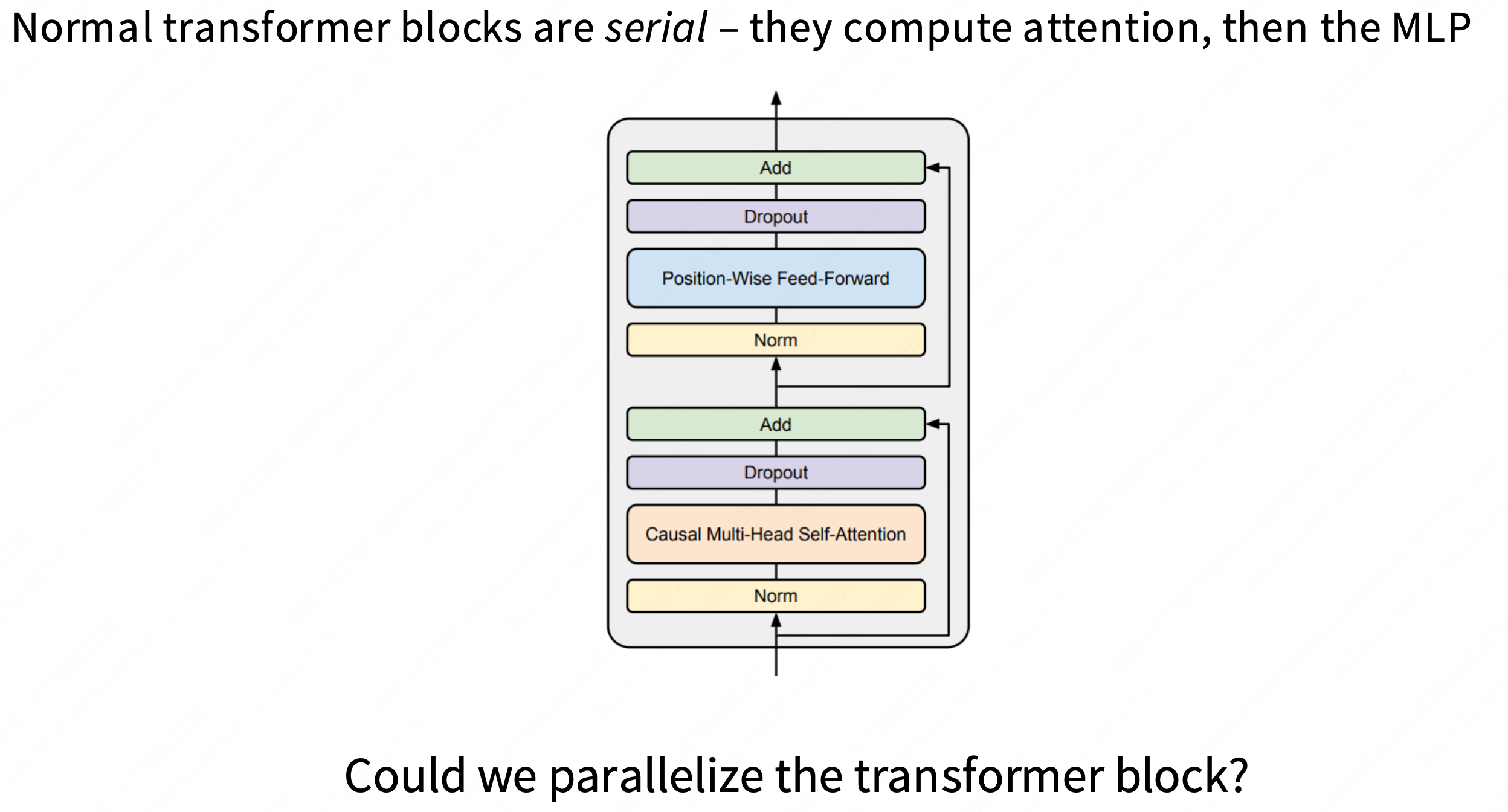
标准串行 (Serialized) 架构 (GPT-2 风格):
y = x + Attention(LayerNorm(x))(MHA 块)
z = y + MLP(LayerNorm(y))(FFN 块)数据流:
x必须先完成 MHA 块的所有 计算(Attention),得到y之后,才能开始 FFN 块的计算(MLP)。瓶颈:
MLP必须等待Attention,两者是串行的。
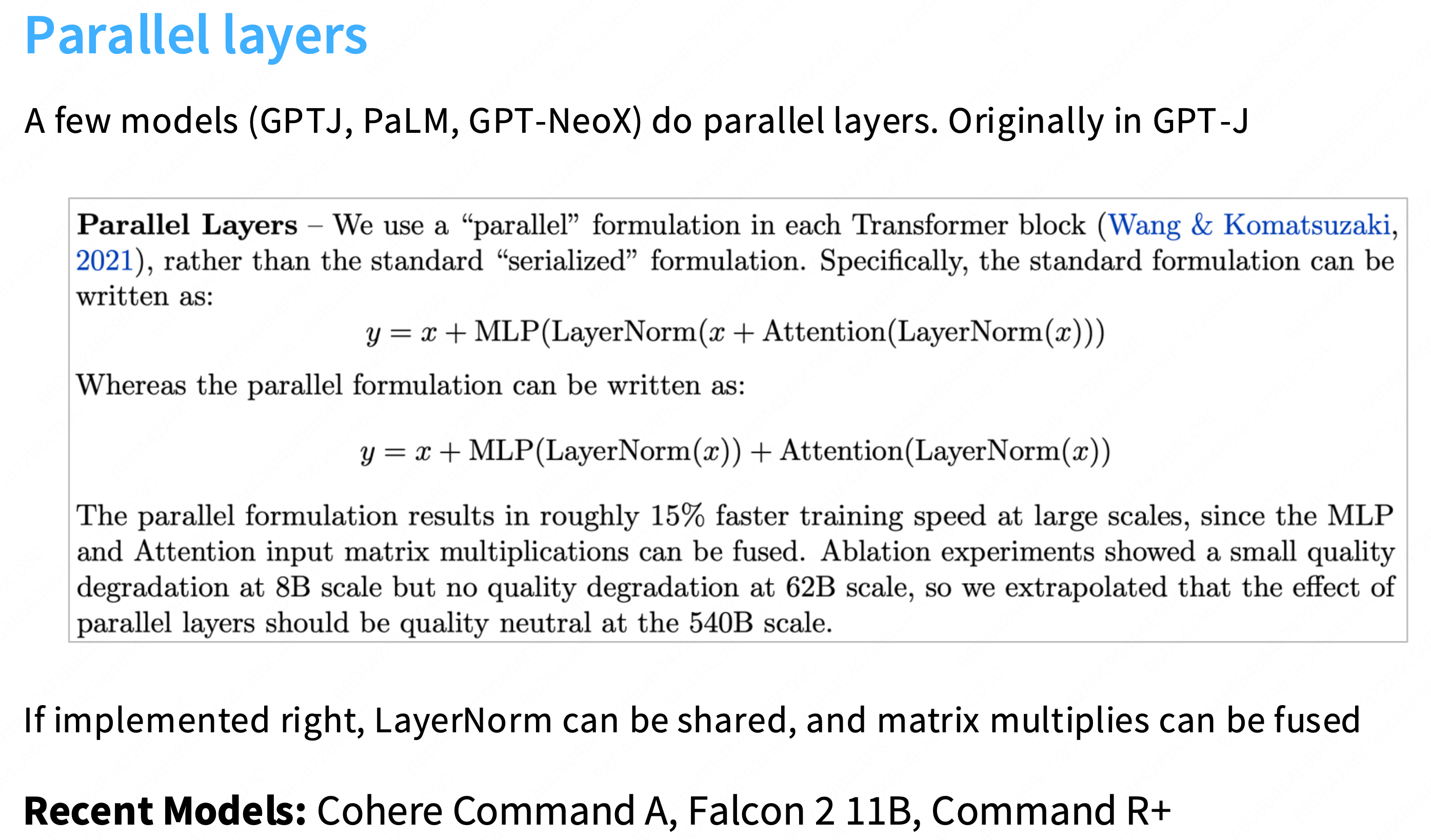
并行 (Parallel) 架构 (GPT-J / Cohere 风格):
y = x + MLP(LayerNorm(x)) + Attention(LayerNorm(x))数据流:
对同一个 输入
x只进行一次LayerNorm。(这是"if implemented right, LayerNorm can be shared"的含义)。
LN(x)的结果被同时 喂给Attention块和MLP块。
Attention(...)和MLP(...)可以并行计算。最后,将这两个块的输出与原始残差
x一次性相加。
Position embeddings
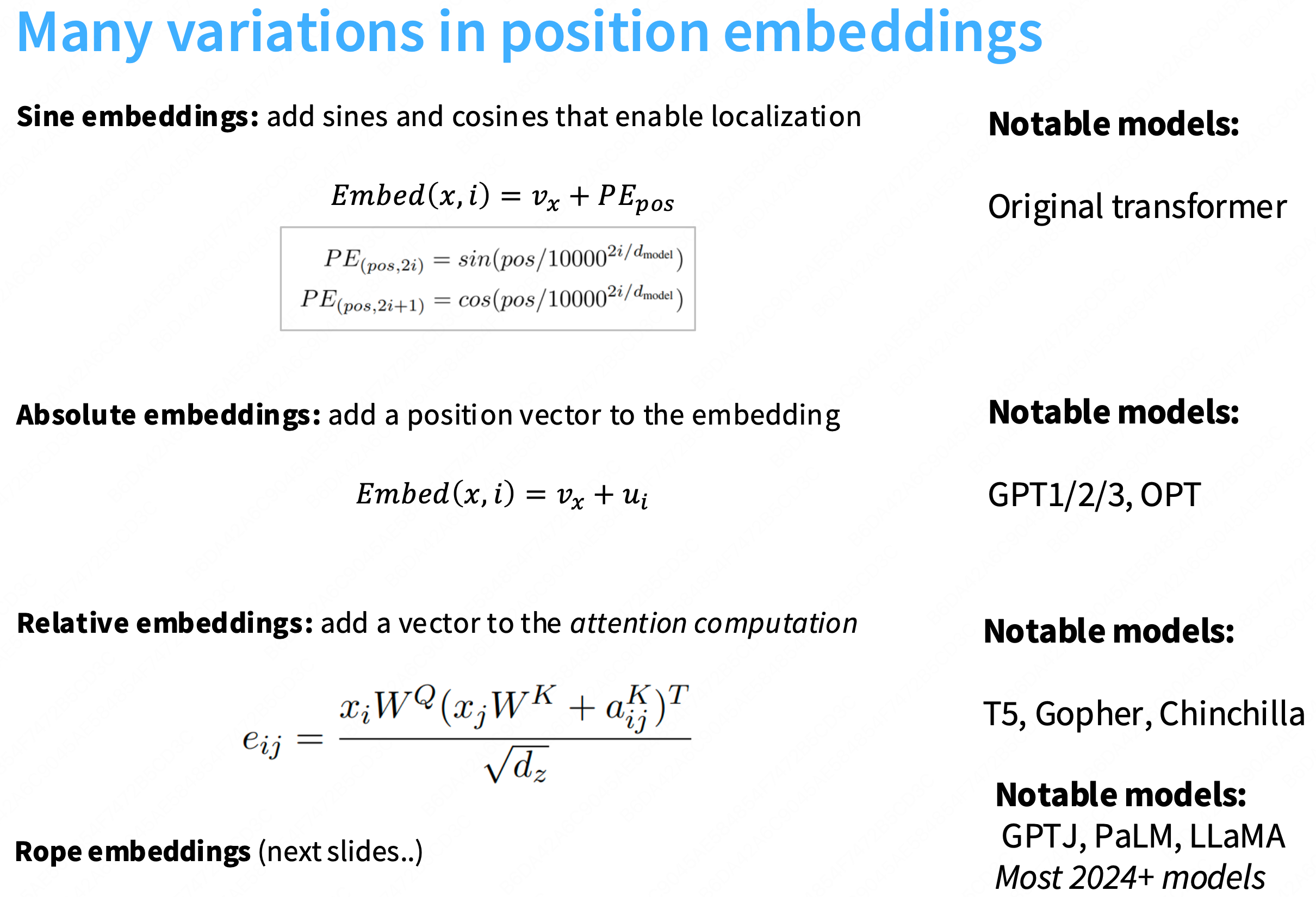
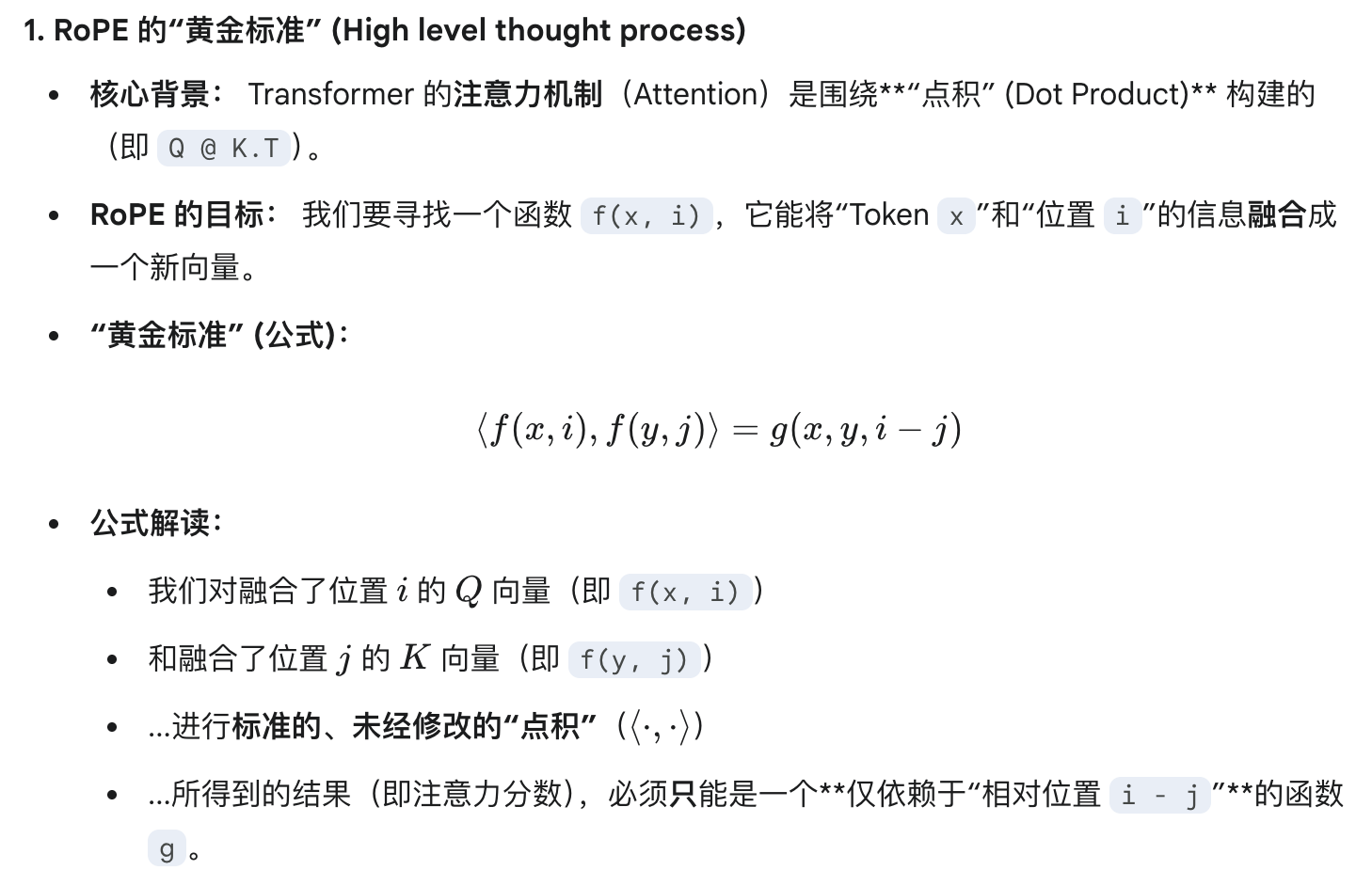
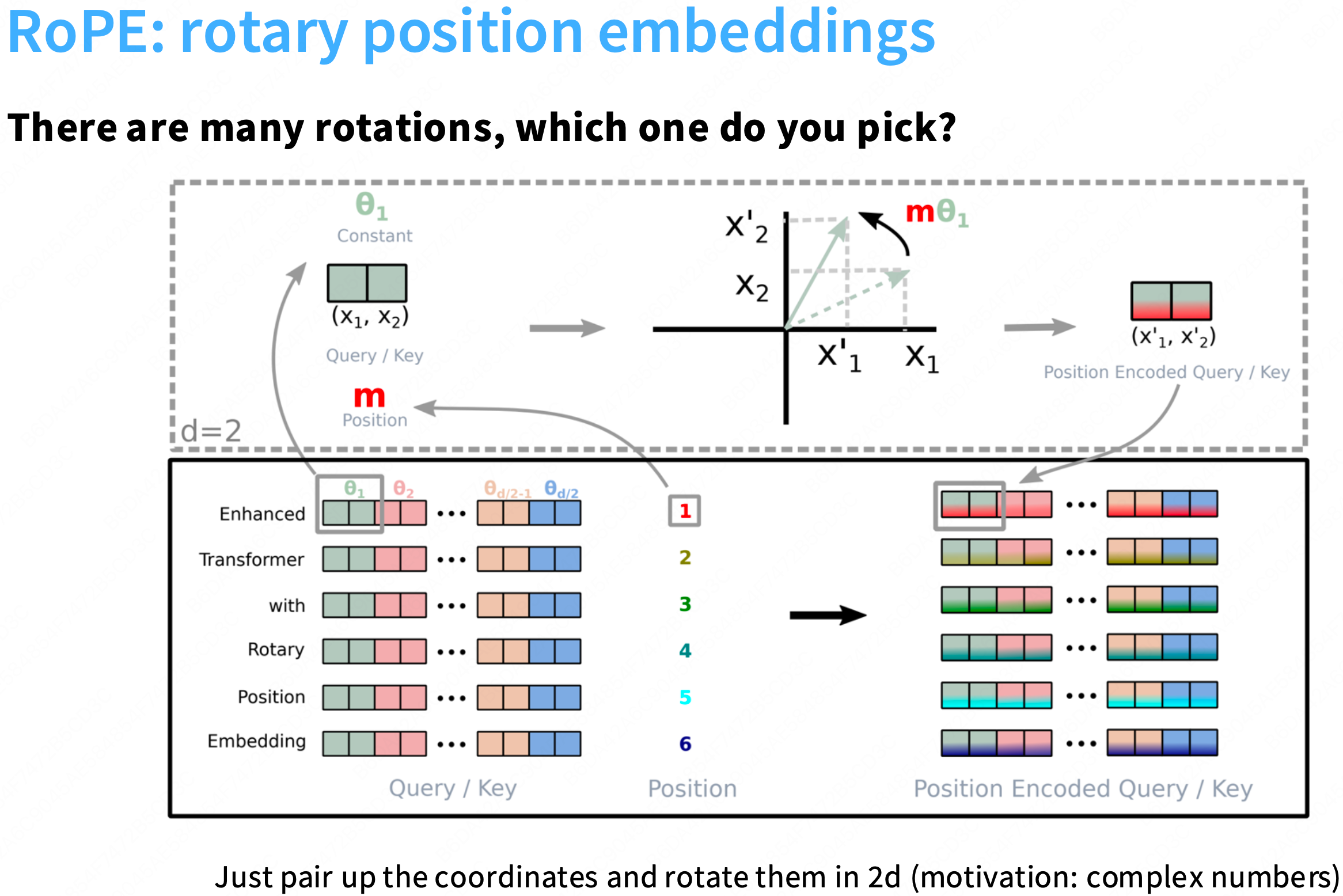
ROPE的高层思想:重要的是这些向量的相对位置。f(x,i)中的x是我要embedding的词,i是我的位置,你只关注词x和词y的距离。
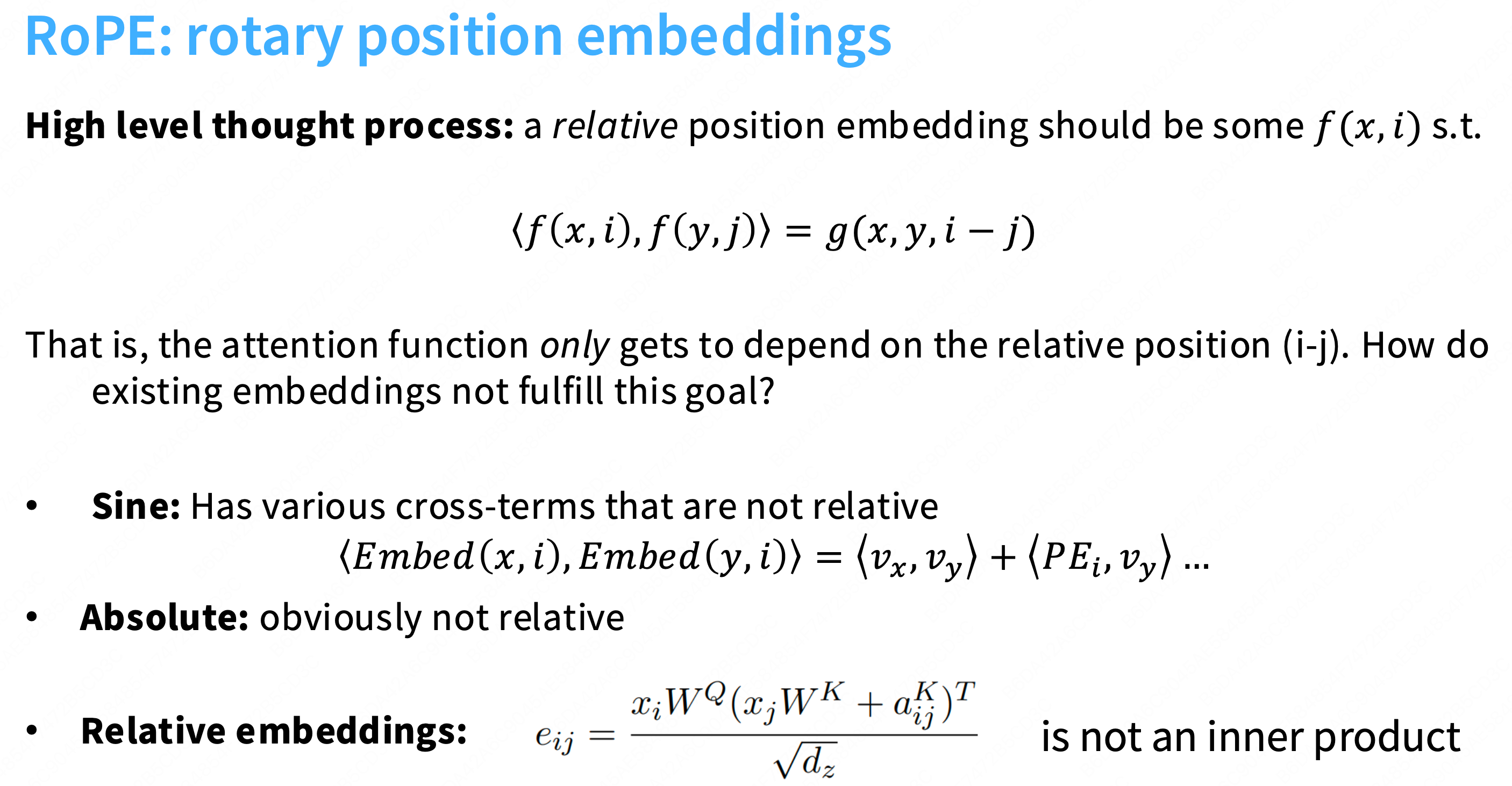
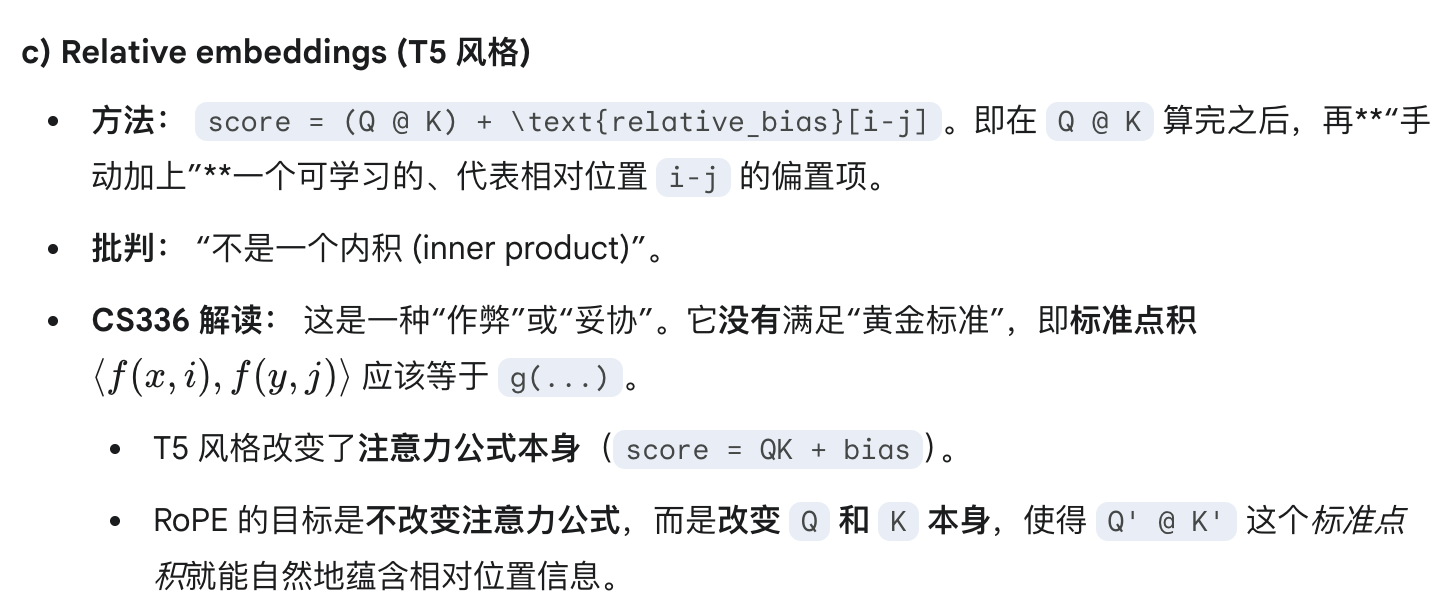
"RoPE 的设计哲学":它首先定义了一个"完美"的相对位置编码应该满足的 "黄金标准",然后论证了为什么之前的所有方法(Absolute, Sine, T5-style)都不满足这个标准。
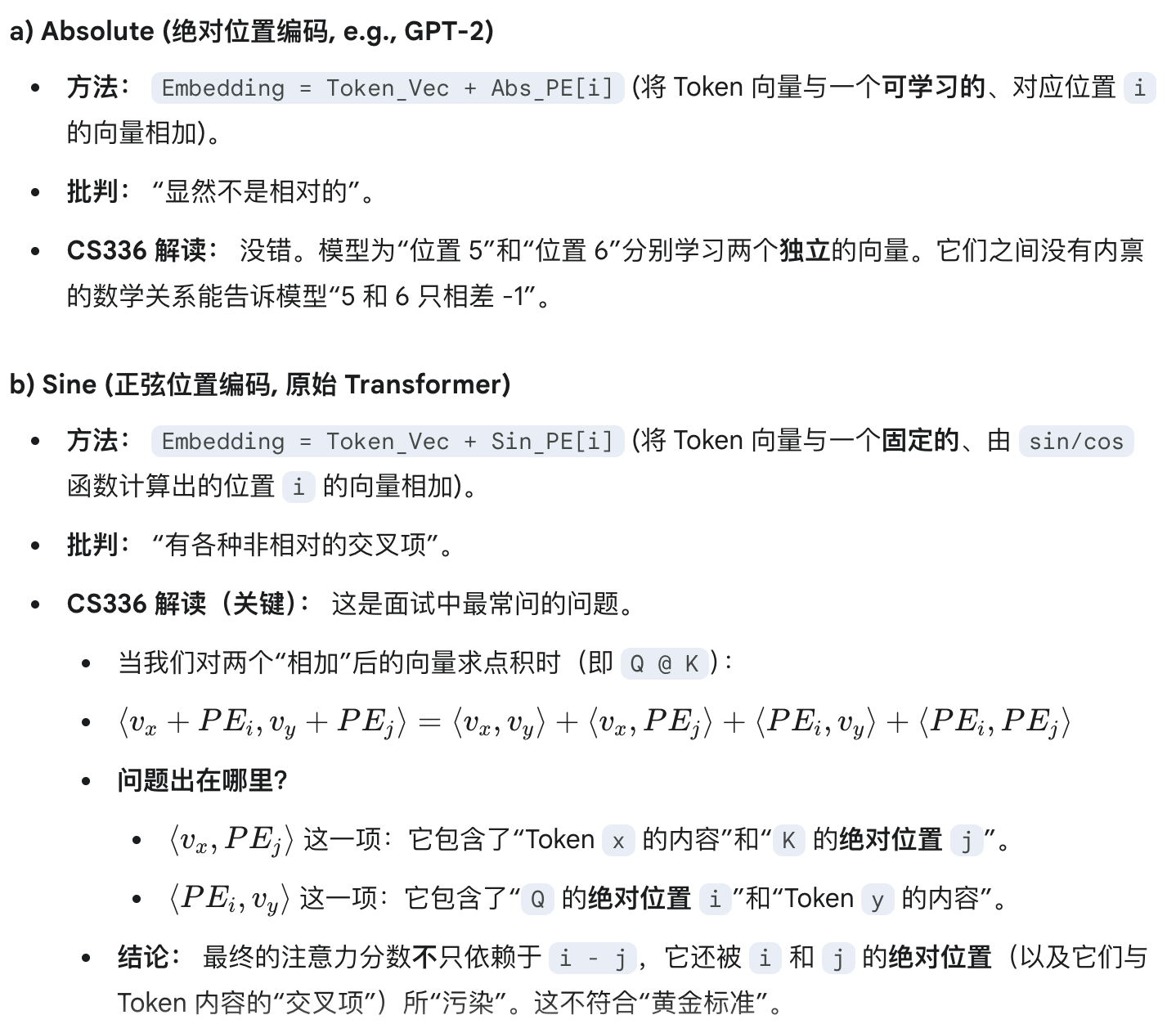
这张幻灯片接着"批判"了为什么所有老方法都不满足这个"黄金标准":
++思考:为什么这边一定要是inner product的形式?++
严格来说,它不必非要满足(T5 风格的相对偏置就不满足,也取得了成功)。
但是,RoPE 的作者(以及 LLaMA, PaLM 的作者)之所以"执着"于将其保留为纯粹的内积(Inner Product / Dot Product)形式,是出于一个极其重要且具有前瞻性的 架构设计考量:为了保持注意力计算的"纯粹性",以实现极致的"硬件和算法兼容性"。
我们来对比一下"T5 风格"和"RoPE 风格"的优劣:
- "T5 风格"的缺陷(
score = QK^T + bias)
形式:
Attention(Q, K) = (Q @ K.T) + \text{relative_bias}问题: 这不再是 一个"纯粹的"点积。它是一个点积 (Matmul)再加上 一个逐元素相加 (Element-wise Add)的操作。这在 CS336 的实践中会带来两个严重的性能问题:
破坏了硬件优化(如 FlashAttention):
像
FlashAttention这样的 SOTA(State-of-the-Art)优化技术,是专门 为softmax(Q @ K.T)这个"端到端"的操作设计的"融合内核"(Fused Kernel)。它可以利用 GPU 的 SRAM 一次性完成计算,而无需 将巨大的(Q @ K.T)矩阵(形状为[B, H, L, L])写回到缓慢的 HBM(显存)中。如果您使用 T5 风格,
FlashAttention就无法使用了。您必须:
计算
score = Q @ K.T(一次内核调用,结果写回 HBM)。再启动一个全新的内核 ,从 HBM 读回
score,执行score = score + bias(一次内存带宽受限的内核调用)。这个过程极其缓慢 ,彻底抵消了
FlashAttention带来的所有速度优势。破坏了算法兼容性(如线性注意力):
许多高效的 Transformer 变体(如 Linear Transformers, Performers)依赖于**核方法(Kernel Methods)**来重排(re-arrange)计算顺序,例如将
softmax(Q K^T) V替换为Q (K^T V),从而将计算复杂度从 O(L^2) 降到 O(L)。
+ bias这一项的加入,从数学上彻底破坏了这种重排的可能性。这意味着 T5 风格的位置编码无法与这些 O(L) 的高效注意力算法兼容。
RoPE 的优越性 (
score = Q'K'^T)
形式:
Q' = f(Q, i)(在 MHA 之外,提前旋转Q)
K' = f(K, j)(在 MHA 之外,提前旋转K)
Attention(Q', K') = Q' @ K'.T好处:
注意力公式保持了"纯粹的点积"形式!
FlashAttention完全不在乎 你喂给它的是Q还是Q'。它看到Q' @ K'.T,就会立刻应用其融合内核进行超高速计算。所有的"线性注意力"算法也完全兼容 。它们只需要对
Q'和K'应用核函数即可。总结:
RoPE 的作者坚持"必须满足内积"形式,是一个极其聪明的工程决策。
它确保了 RoPE 只是一个"即插即用"(Drop-in)的模块,它不会 以任何方式"污染"或"破坏"下游的注意力计算公式。这使得 RoPE 完全兼容
FlashAttention和各种线性注意力等所有 旨在优化标准点积的 SOTA 技术,从而实现了极致的性能和未来的可扩展性。
内积只会关注距离的差异, 通常这种旋转在2d是非常明显的,但在高纬中不太明显。rope的做法是将高纬度D切分成二维的块, 每两个维度将被某个theta旋转,因此会有一个旋转速度,我们将旋转这些维度对。
此时,每对维度都在编码所有这些的相对位置,就像在sin和cos 的embedding ,使得一些嵌入旋转得很快,而其他的嵌入旋转的更慢。因此,他们可以捕获高/低频信息or近距离、远距离的信息。
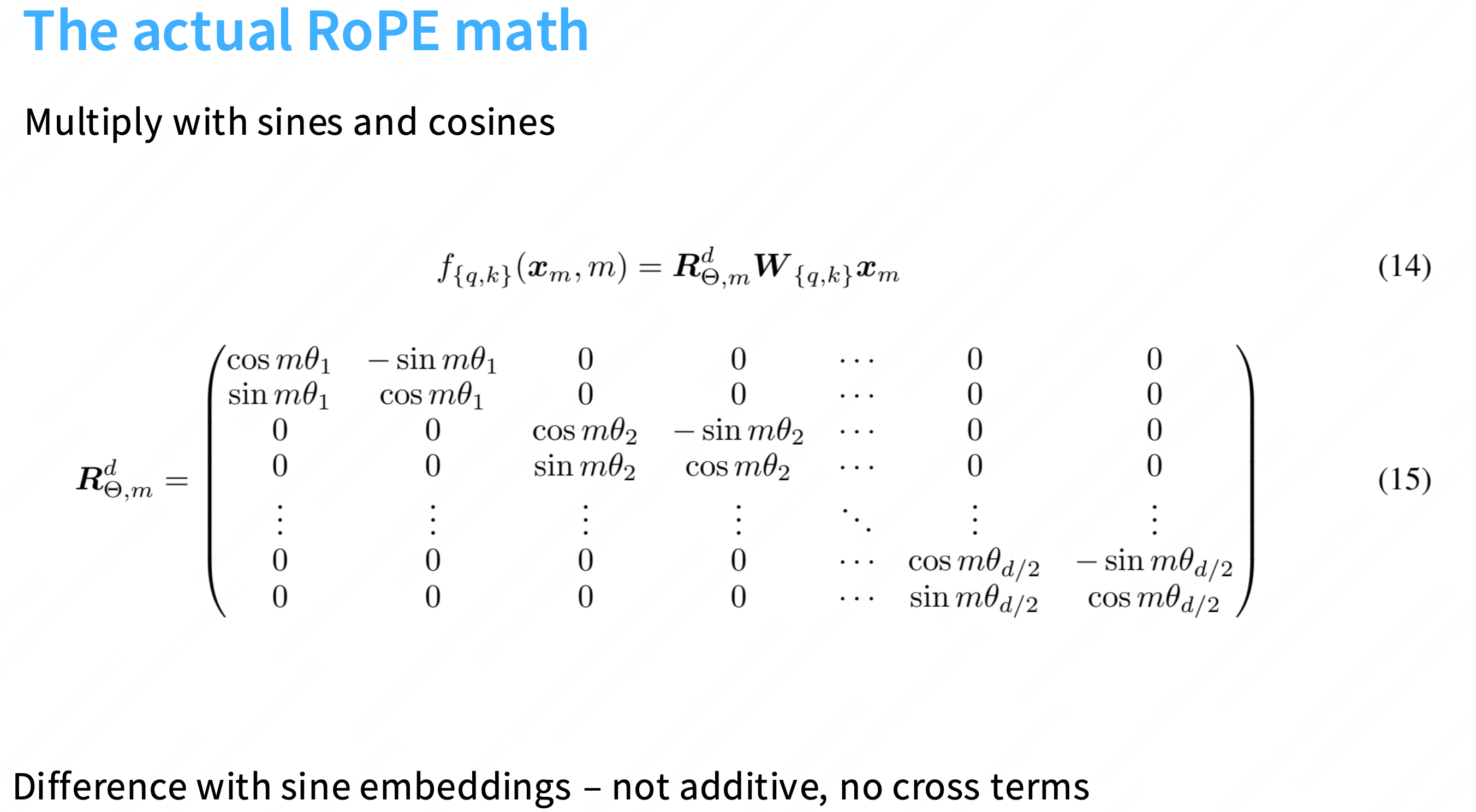
可以将其视为嵌入向量 与 这些2*2块矩阵相乘的操作。这里面不涉及加法or交叉项,完美符合上面提出的原则->一切都是相对的。
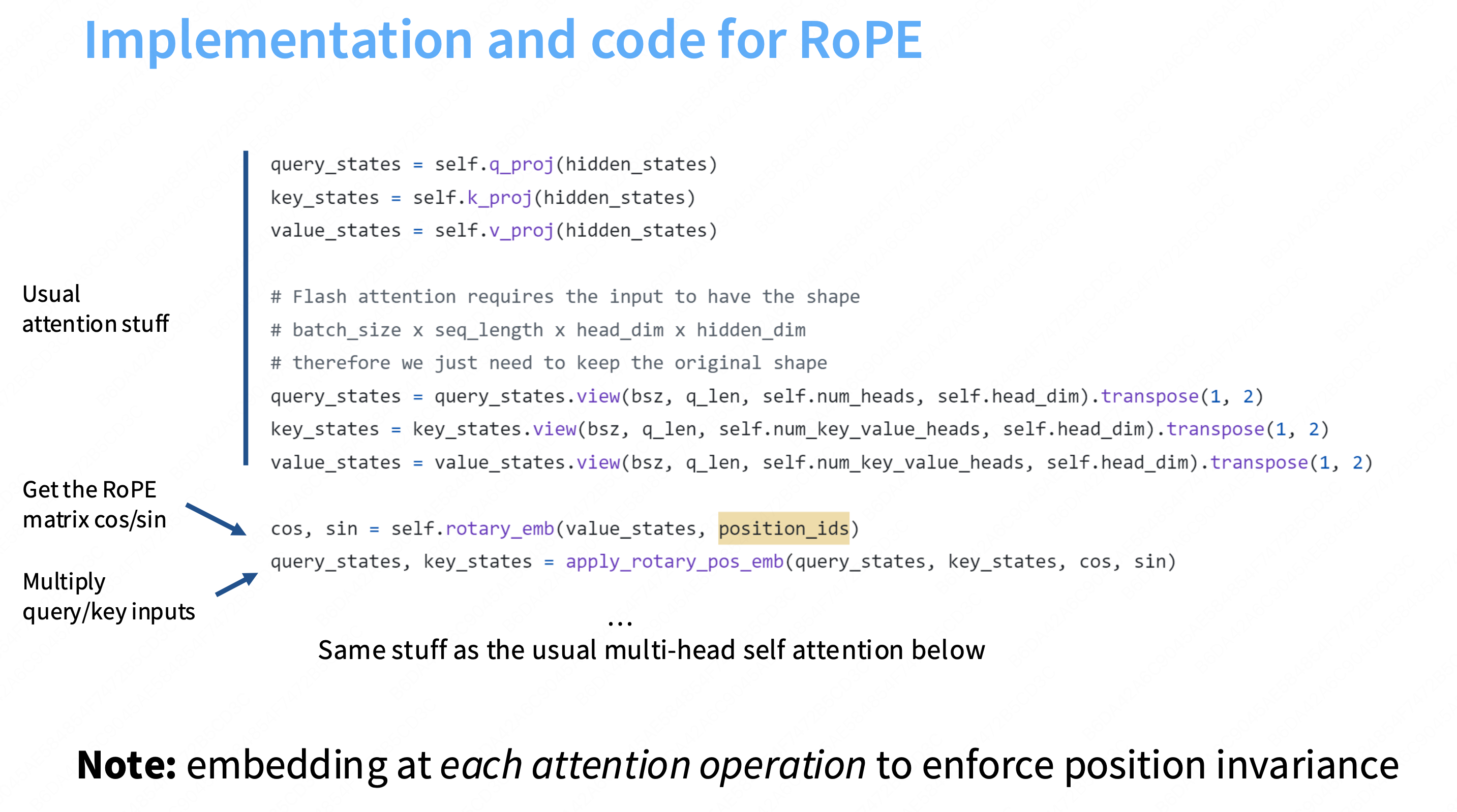
注意rope将在实际的注意力层进行操作, 而不是在底部添加位置编码。 只有当生成Query和Key的时候,需要这么计算拿到相对的位置信息。
Hyperparameters
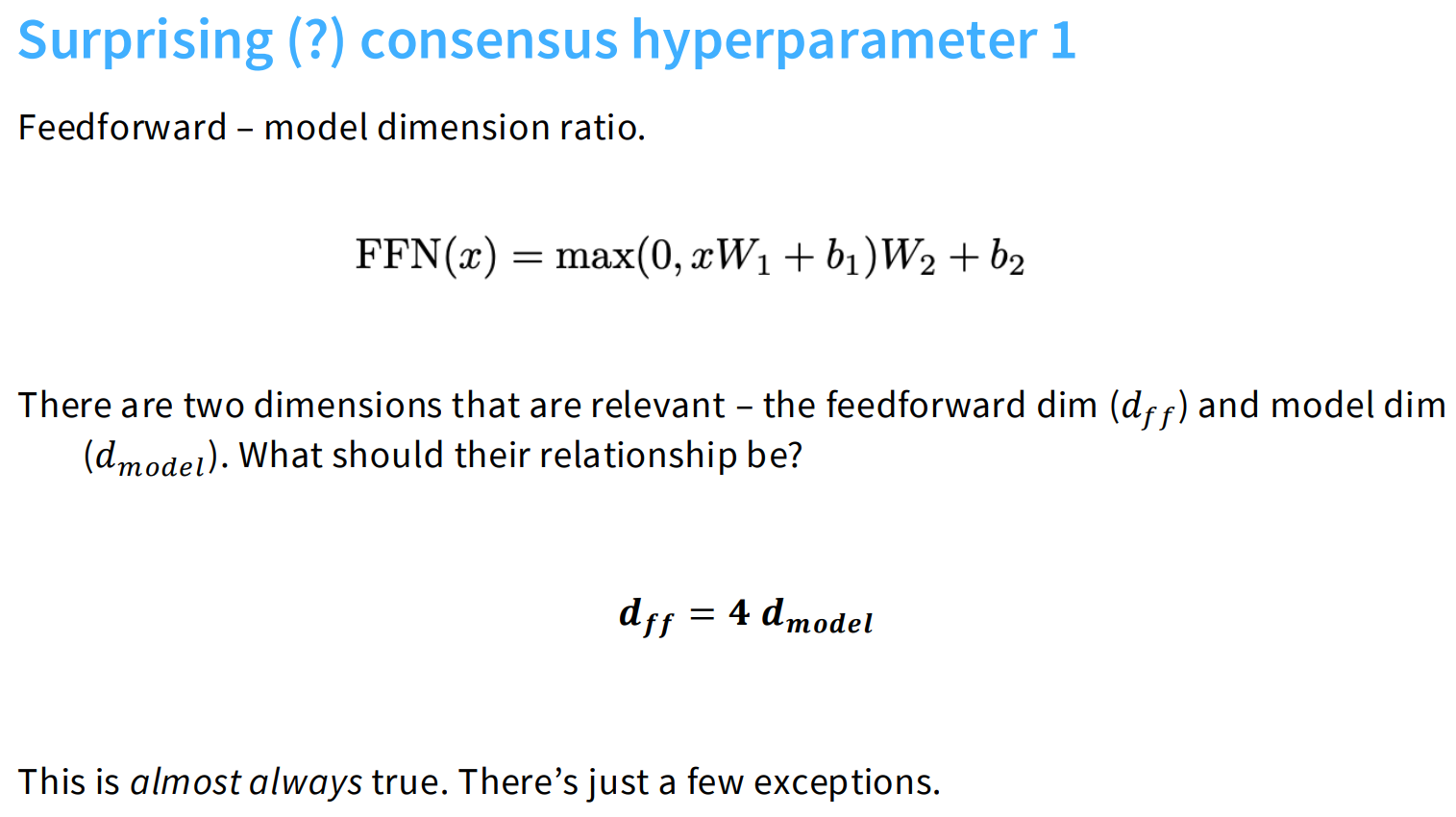
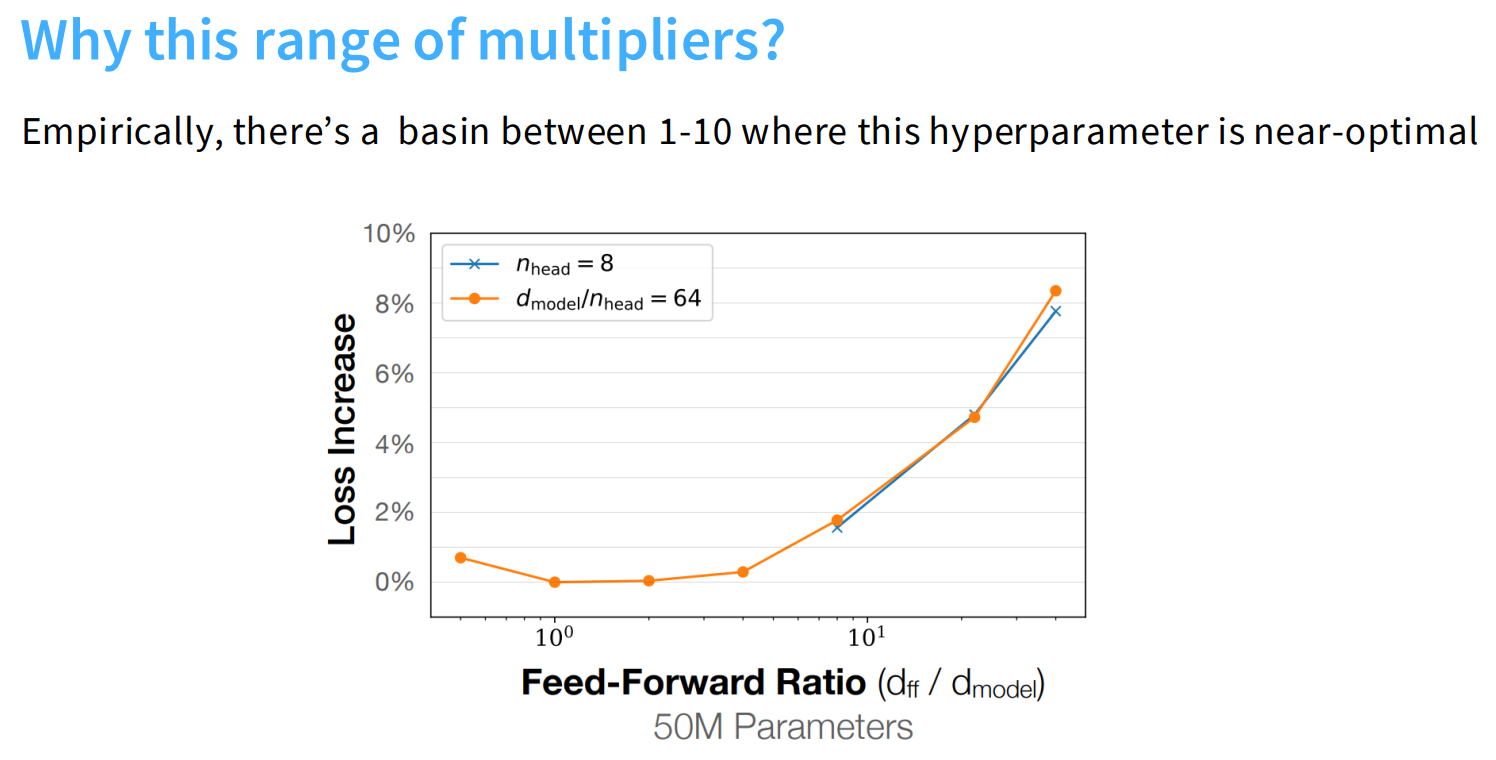
feedforward size
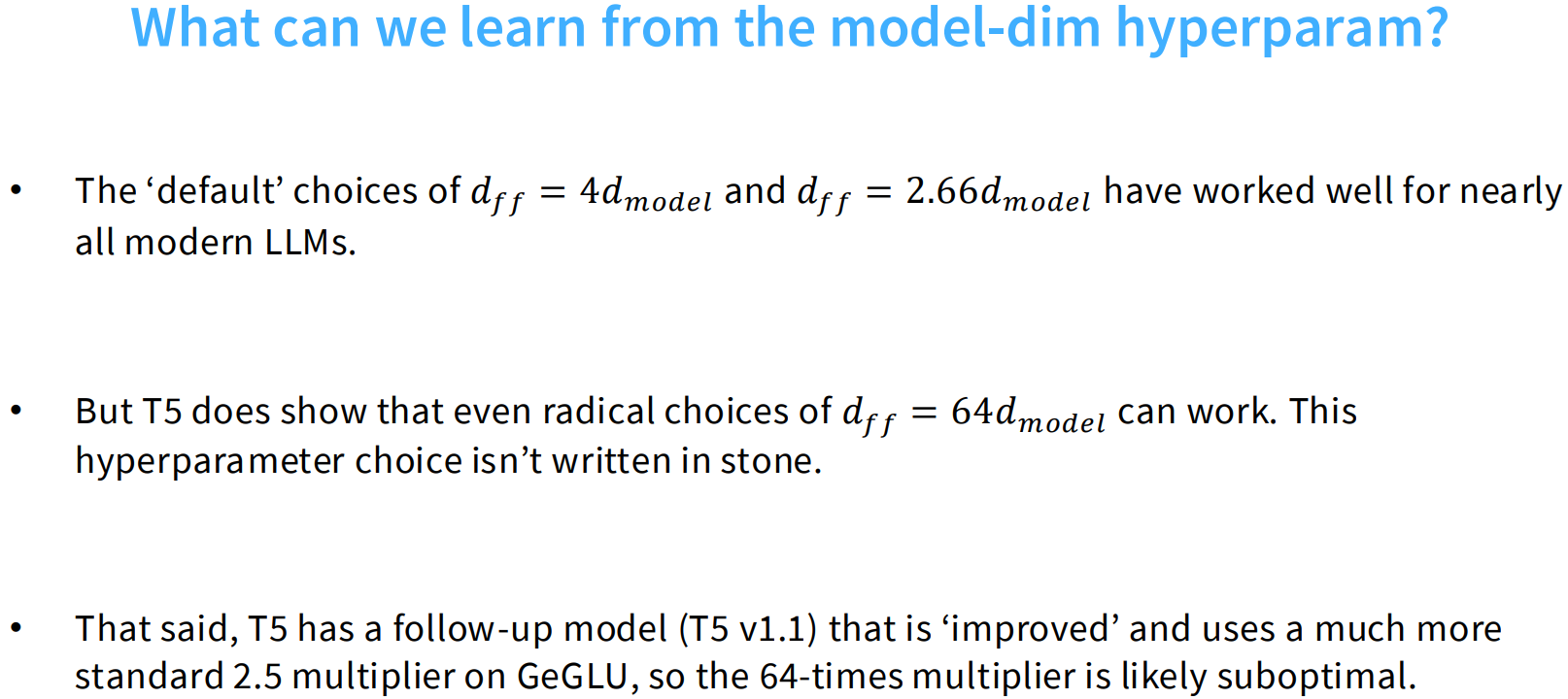
通常dff升维的维度是d_model的4倍(经验上)。下面是一些变体:
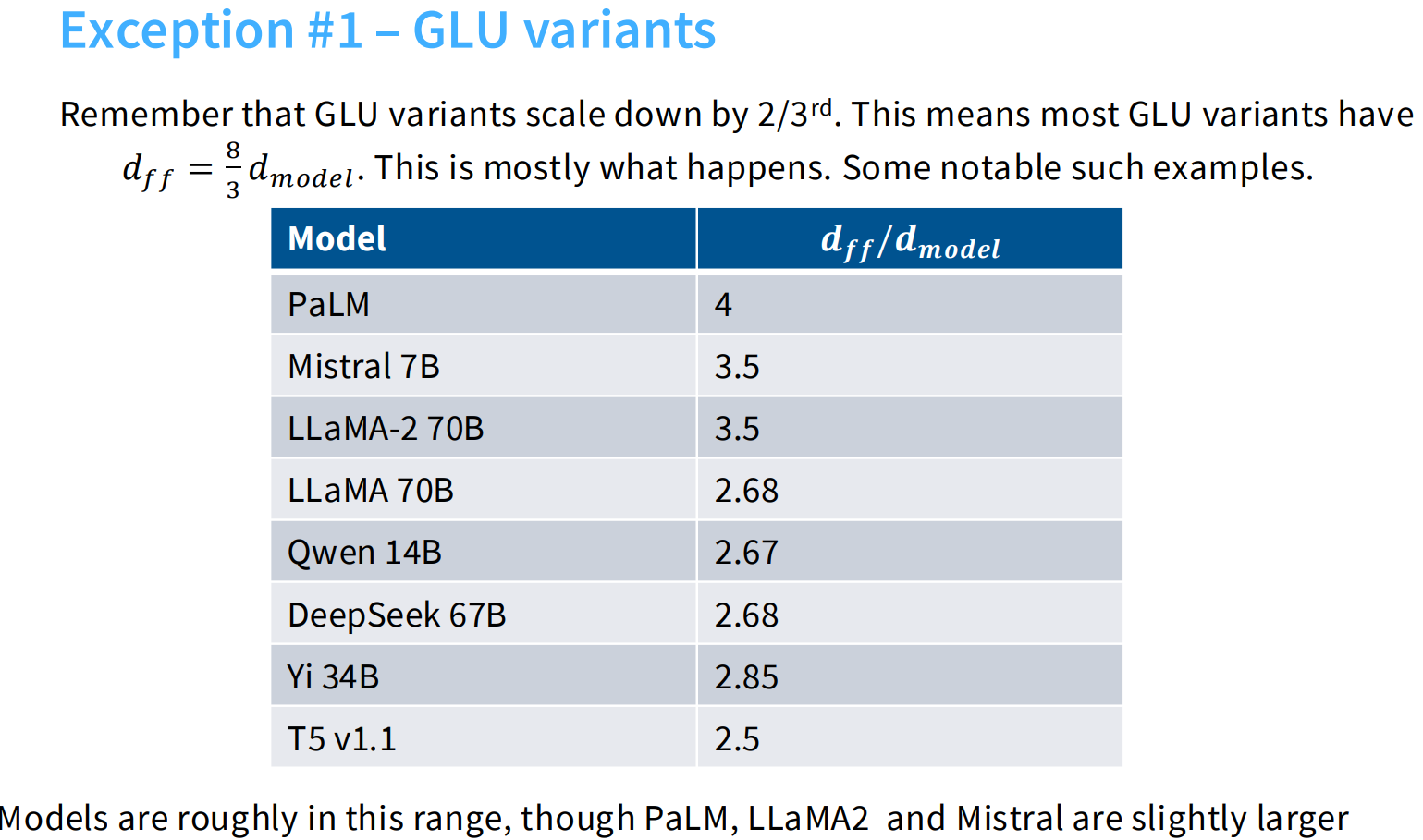
这个是前面讲到的,glu为了保证总体的模型参数量不变,通常dff是d_model的8/3倍。
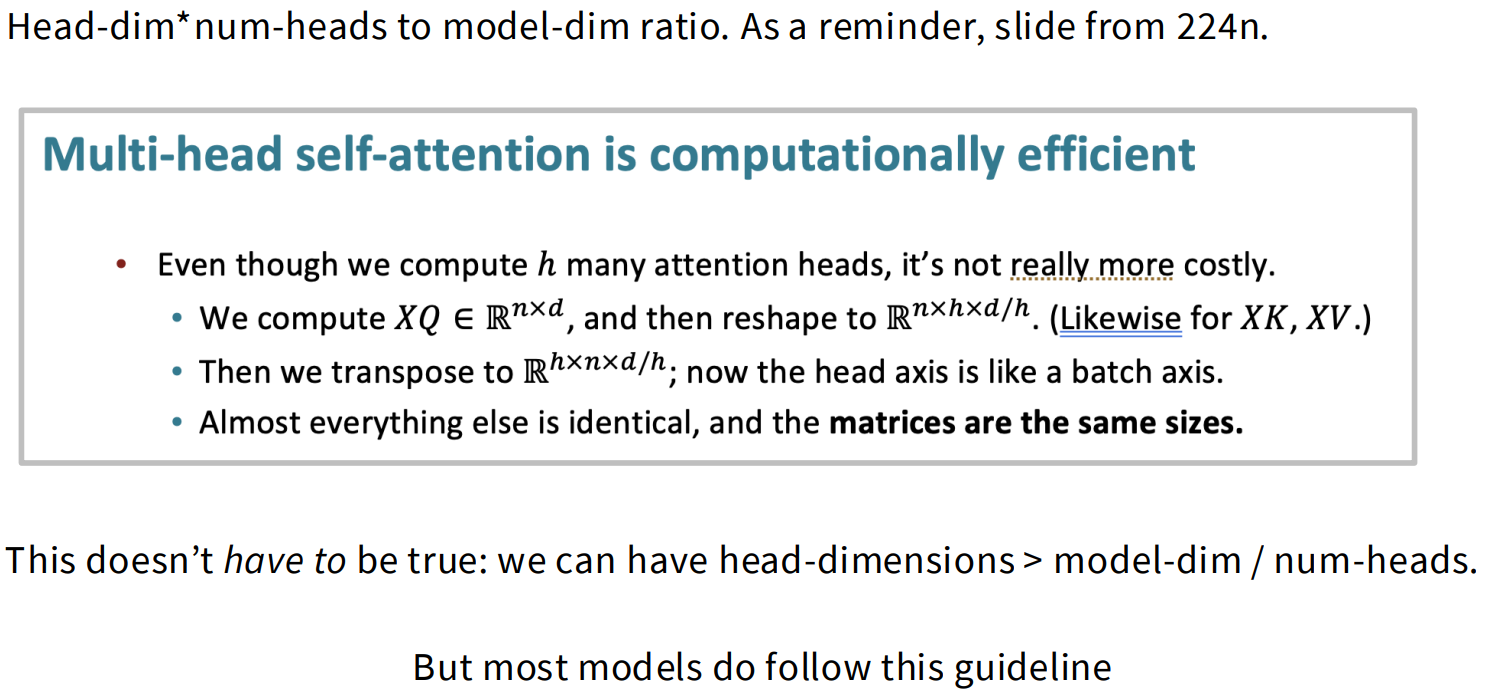
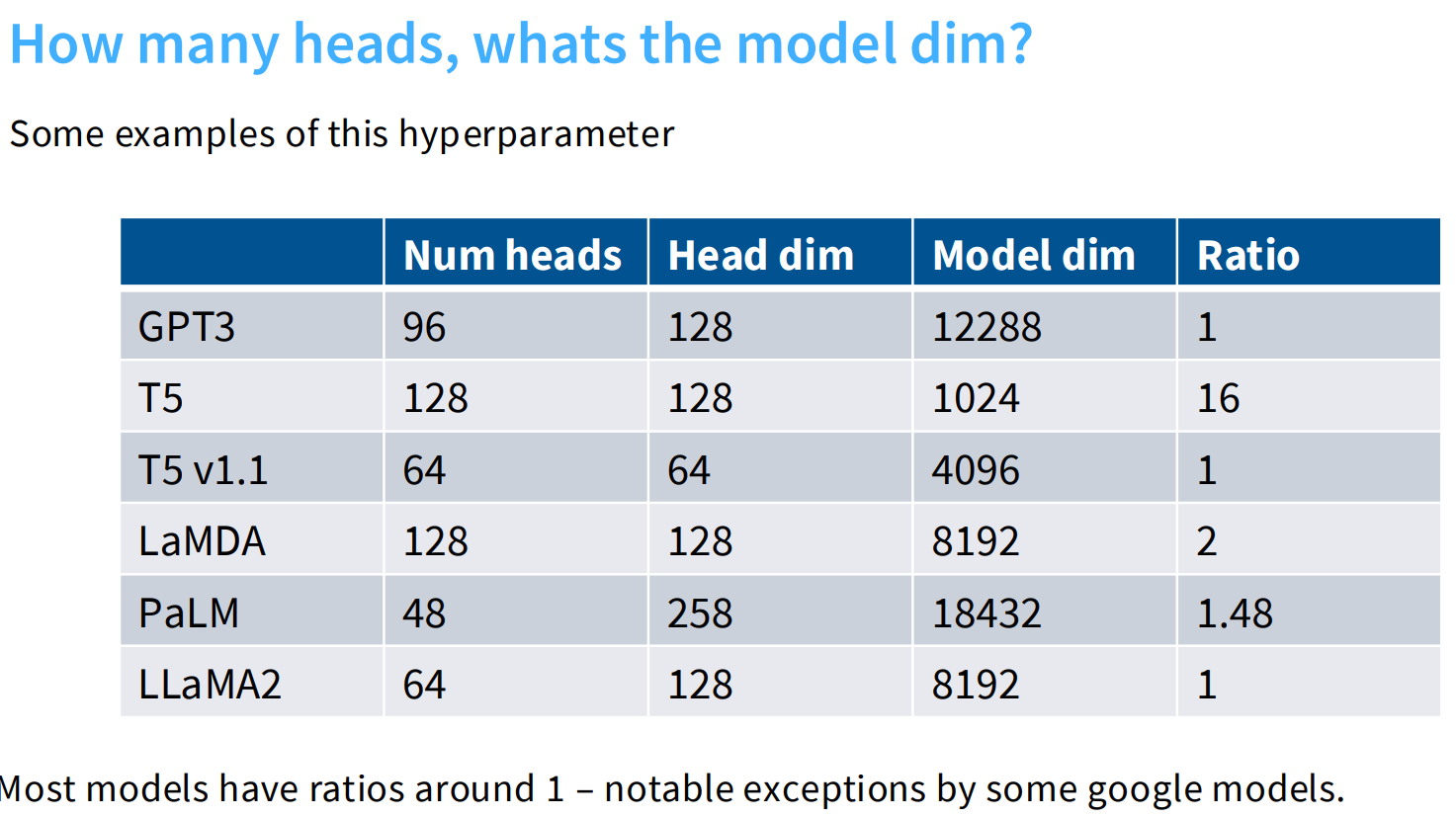
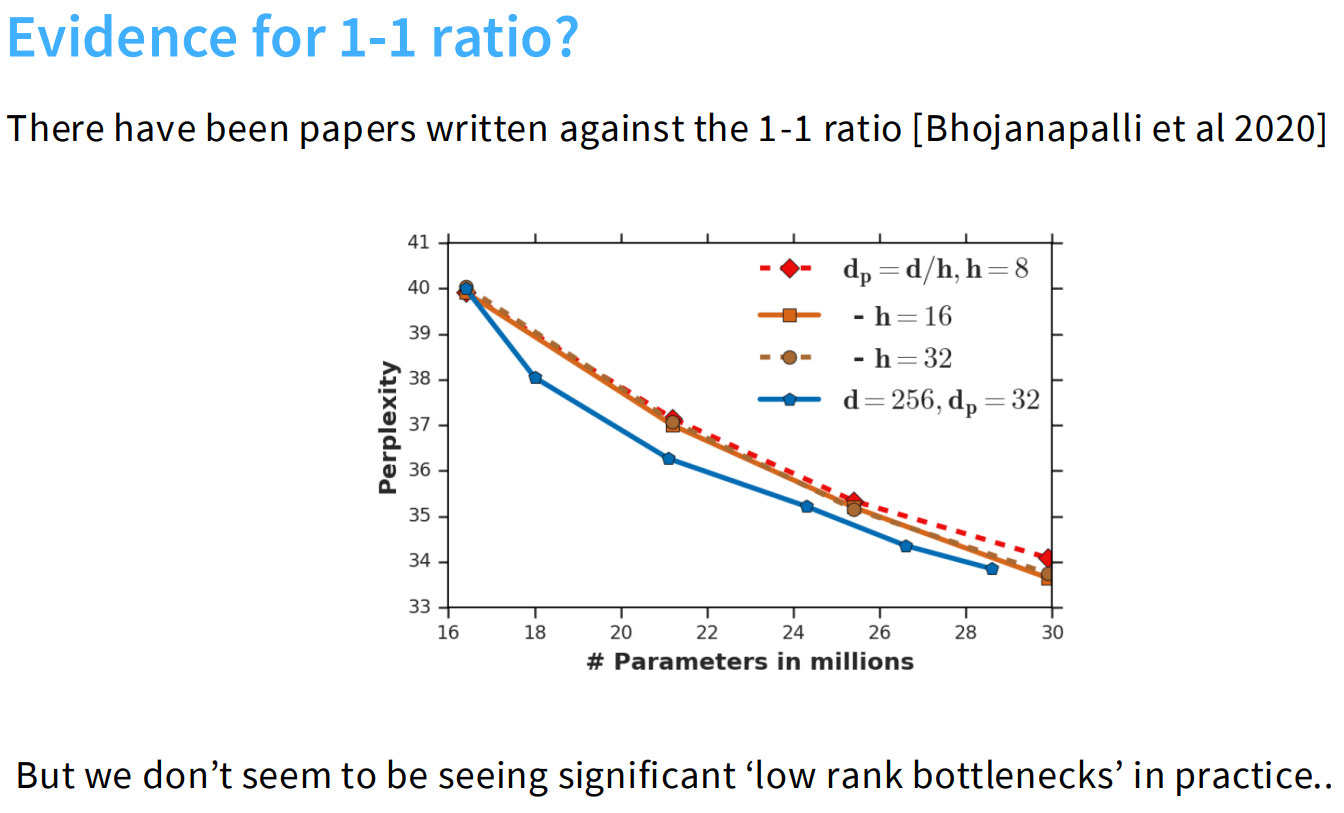
head-dim * num-heads 和model-dim的比例关系
大部分head-dim * num-heads ≈ model-dim。
bhoj等人提出,如果在ratio=1的情况下,num-heads越多,head-dim越小,维度小对应矩阵的rank越小,每个头的注意力表达能力有限--->但实际并没有太大的影响。
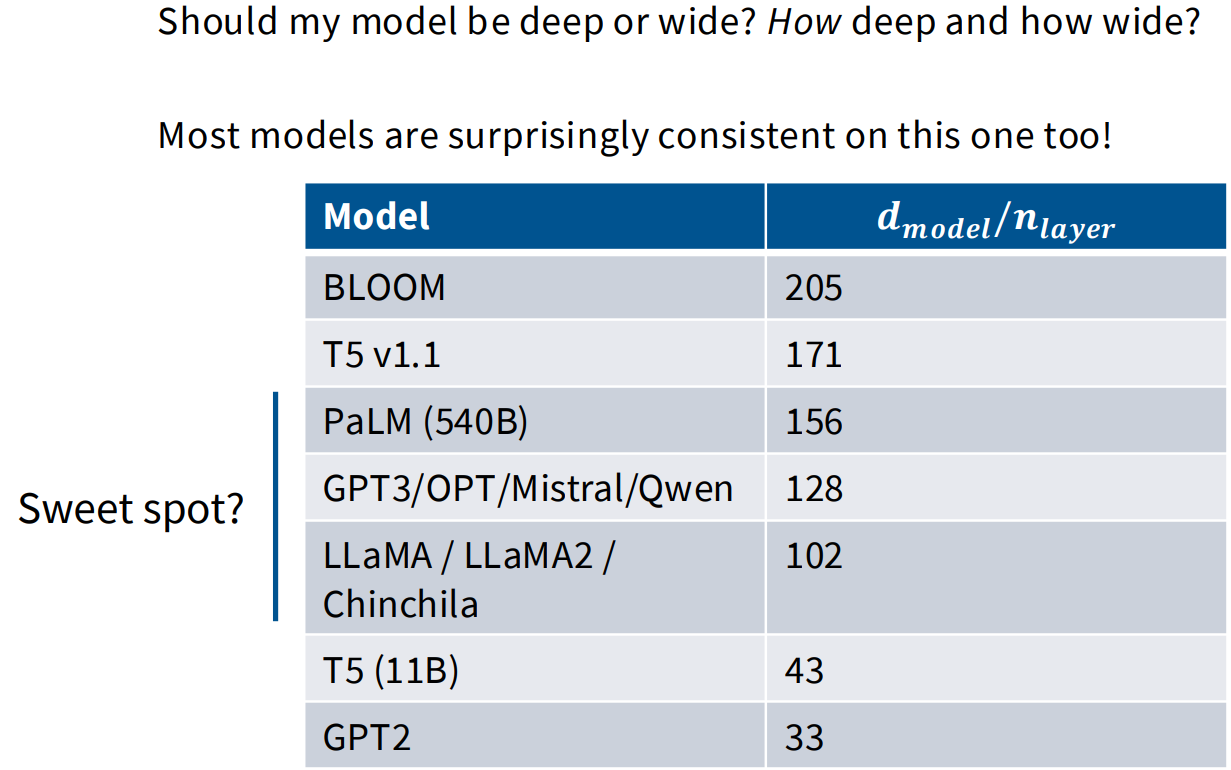
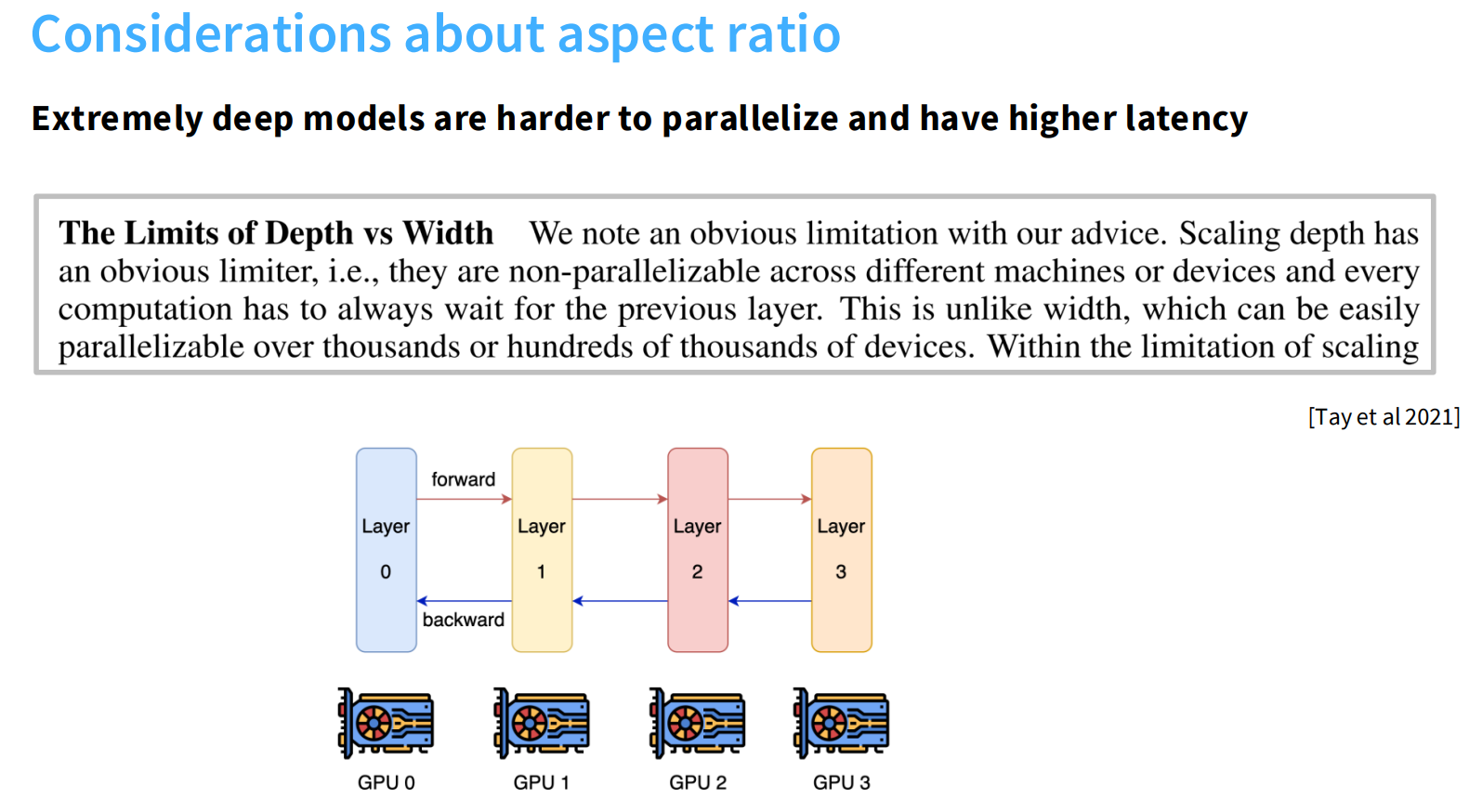
Aspect ratios 宽深比
通常来说,深度代表着模型更加聪明,宽度代表着计算的高效。Aspect ratios可以控制我们计算的并行化程度。
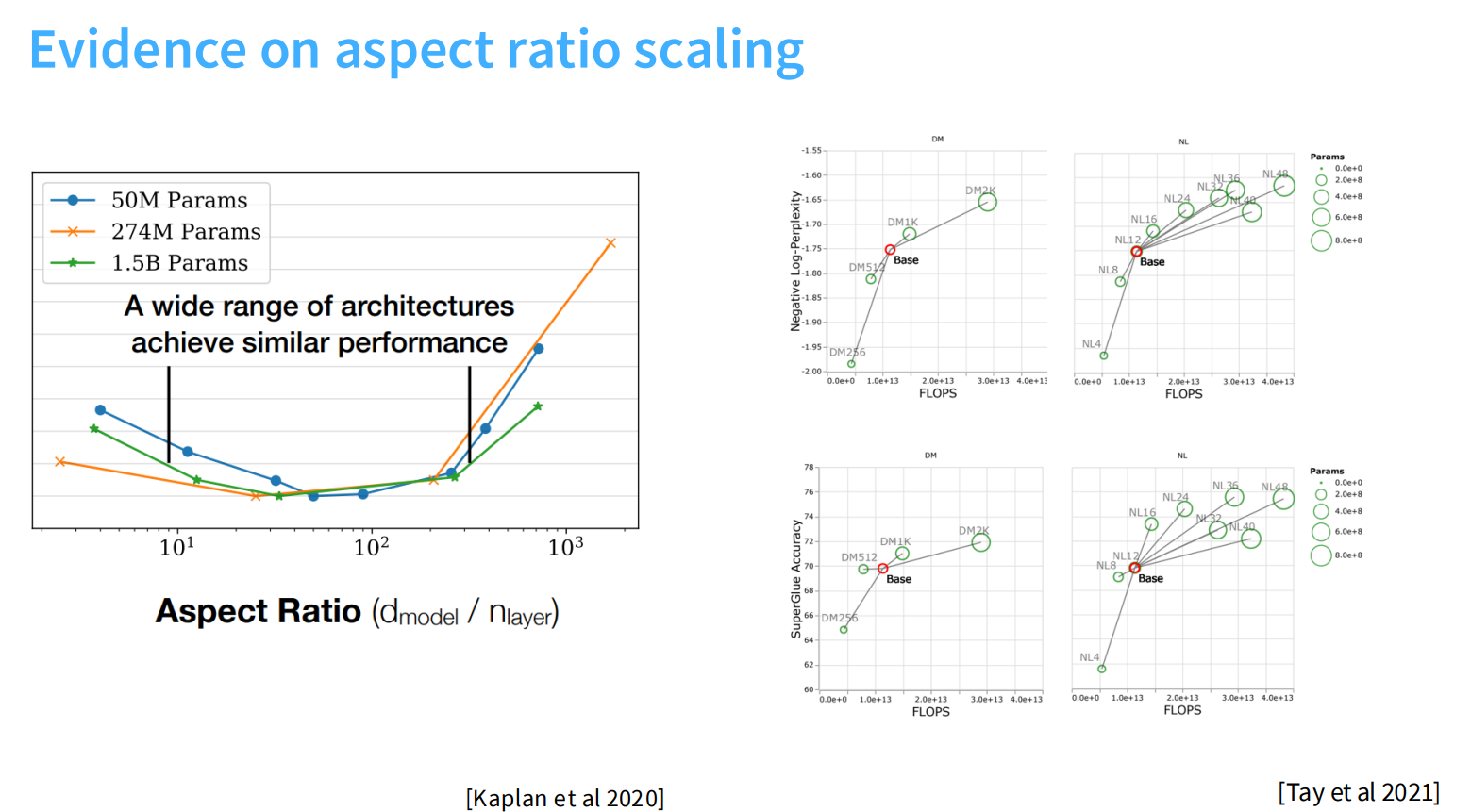
差不多在100左右区间,都能够达到不错的效果。现有的一些实验表明,aspect ratio大概会对下游任务会有较大的影响。
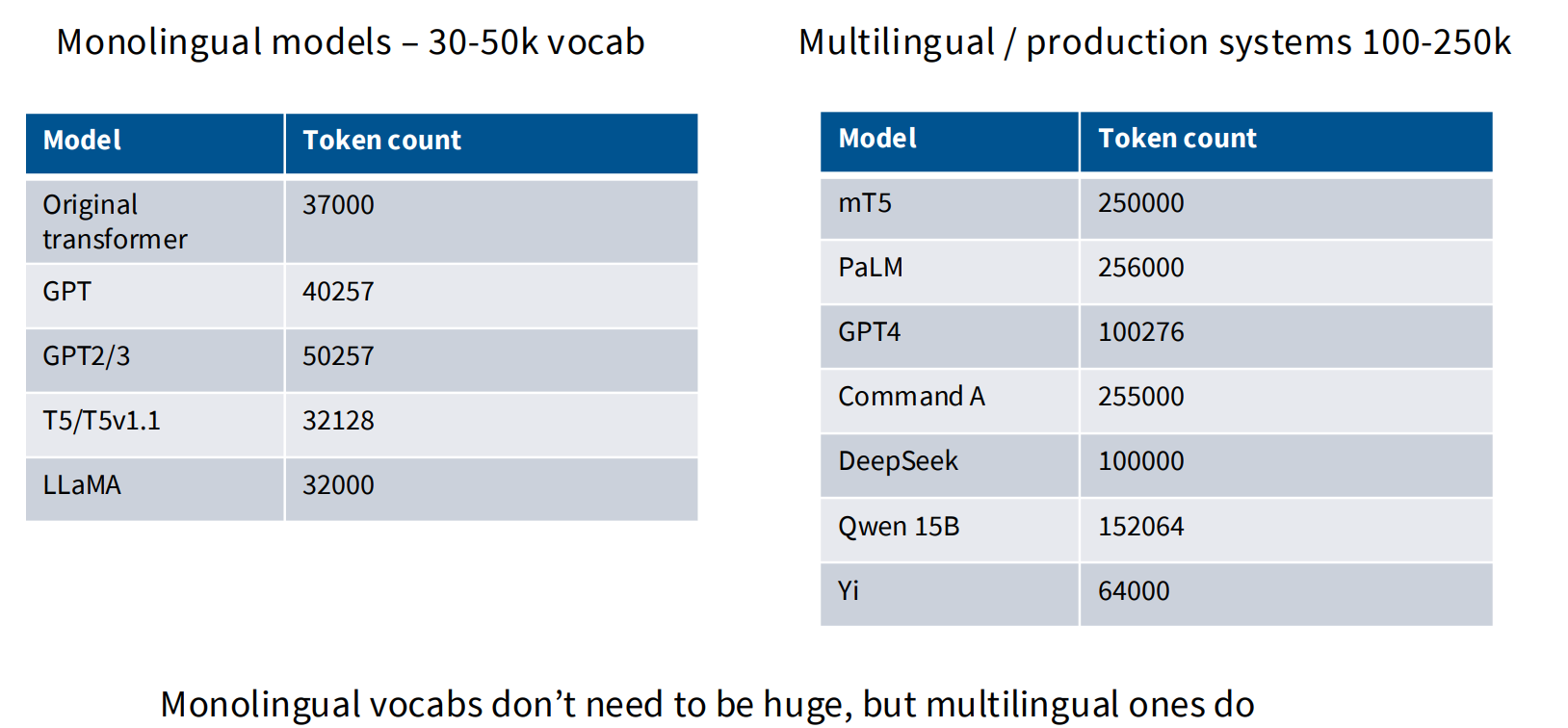
vocabulary size
单语言大概在四五w的量级。多语言大模型的词表大概在十几万到二十几万这样。
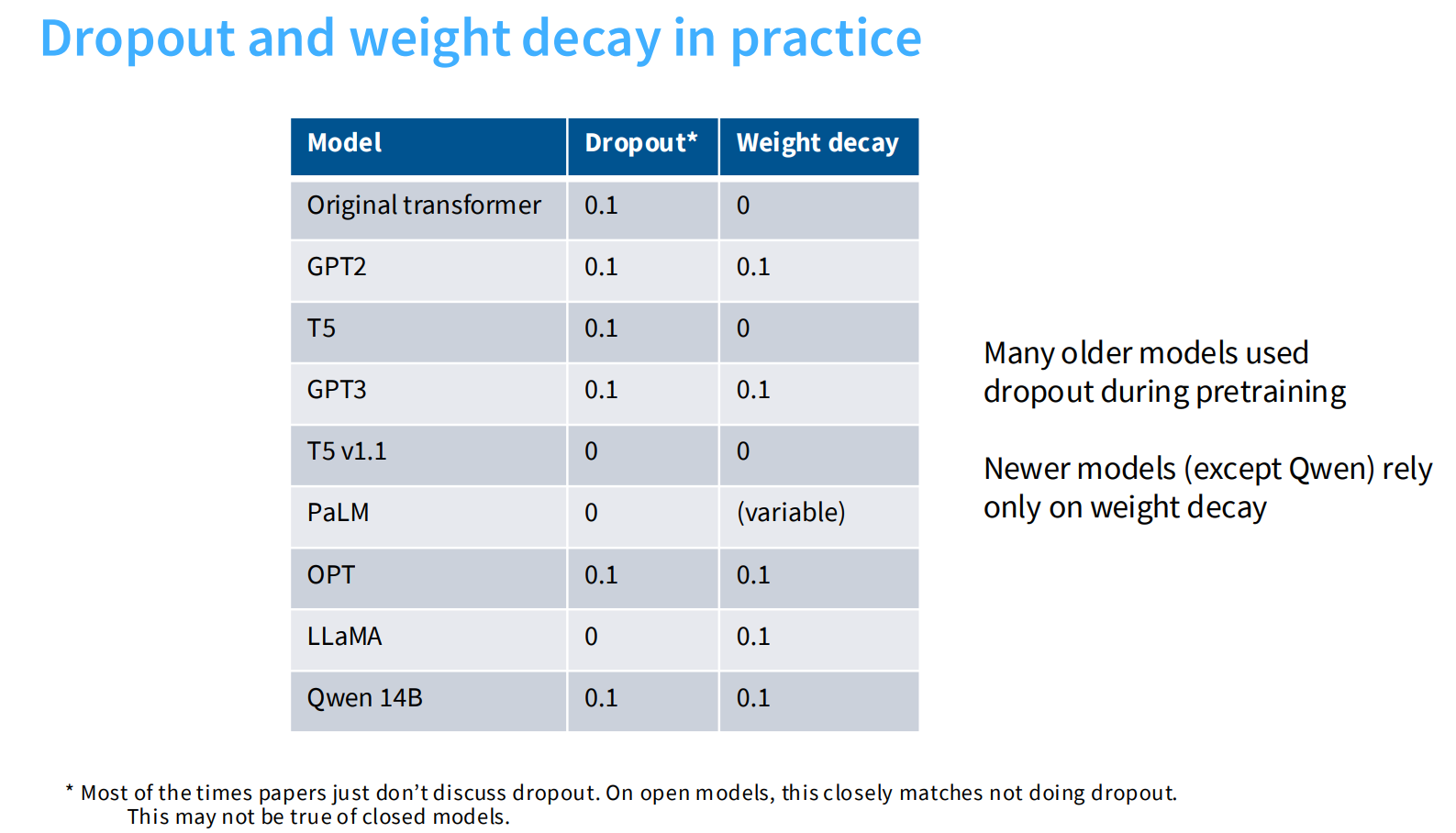
Dropout and other regularization
似乎预训练用了大量的数据,而且基本只跑一个epoch,根本不会出现过拟合,这样是不是就不需要dropout?
但事实上,dropout是之前常会用到的手段,近年来dropout使用场景变少,更加趋向于使用weight decay。但weight_decay实际使用的目的不是控制模型过拟合(图1可以看到,不同weight decay比例并不影响最终trainloss和val loss的比例)。
图2和图3可以看到weight_decay会与优化器的学习率等产生非常复杂的作用(有decay的时候,当learning rate骤降的时候,模型的training loss也会骤降),实验结果可以看到设置weight decay的目的是为了得到更好的training_loss。
非常反直觉的:通常来说加入weight_decay之后,模型的val_loss会降低,但实际上,trainingloss降低且和val_loss保持一致(图1)


Stability tricks
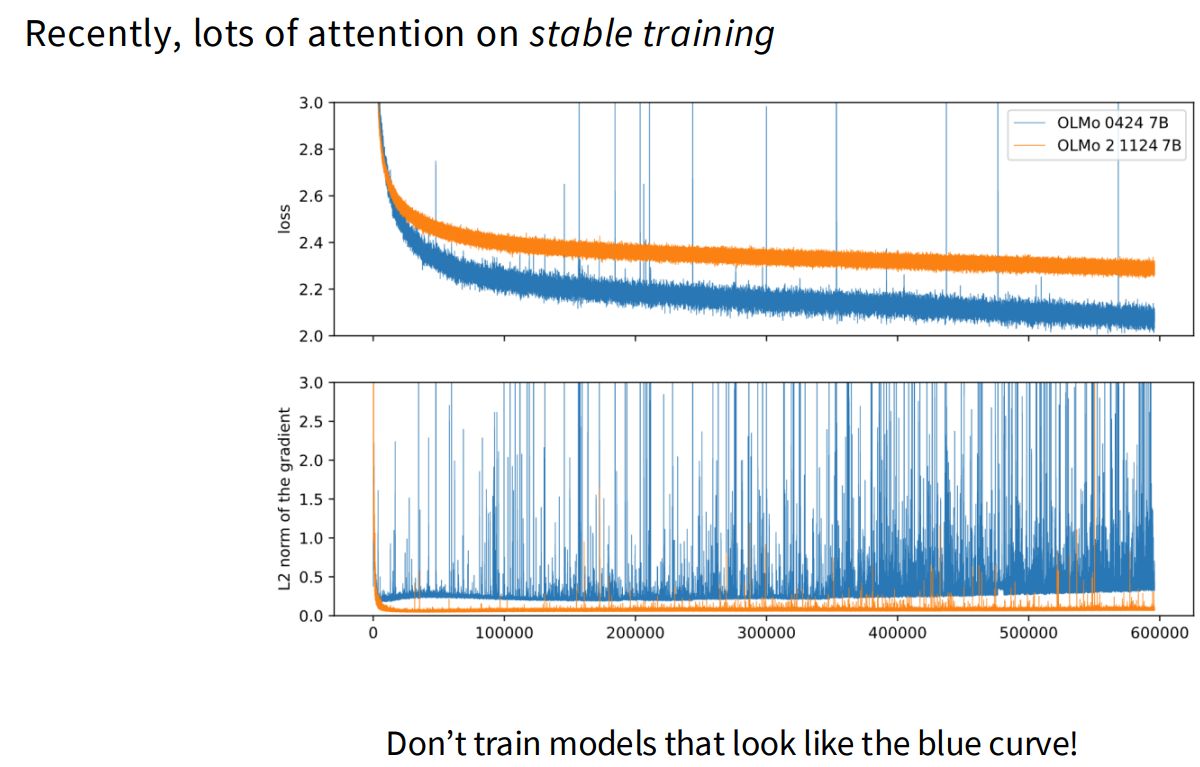
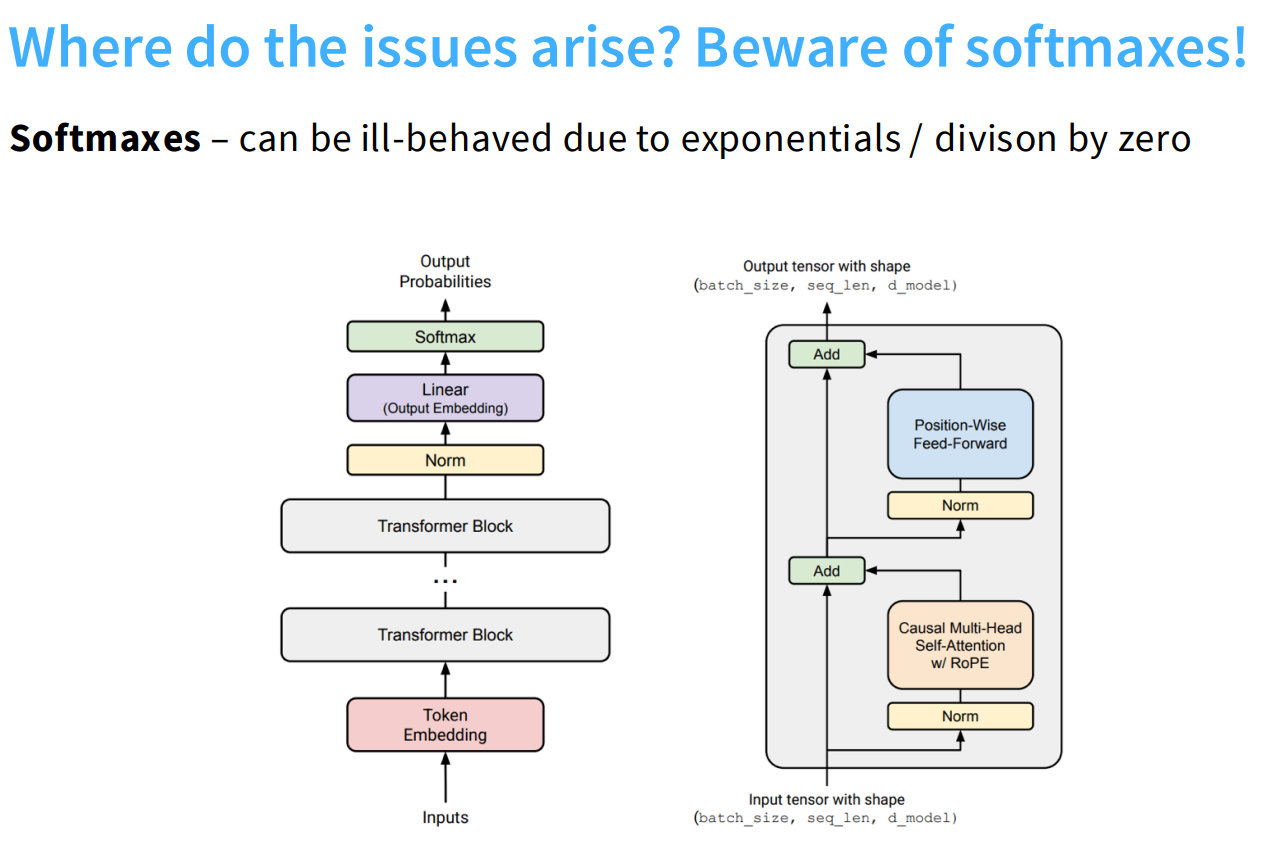
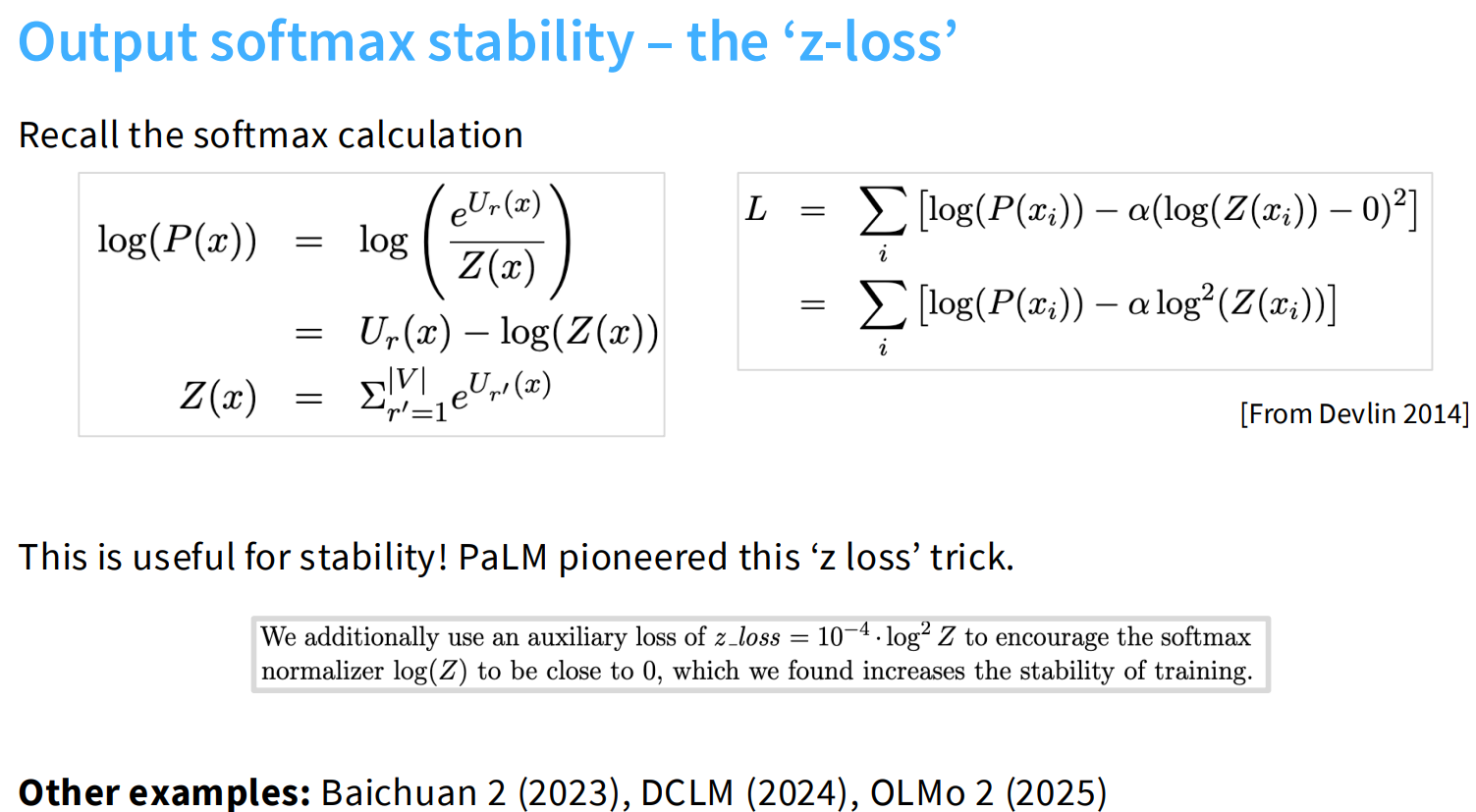
z-loss(控制softmax的输出)
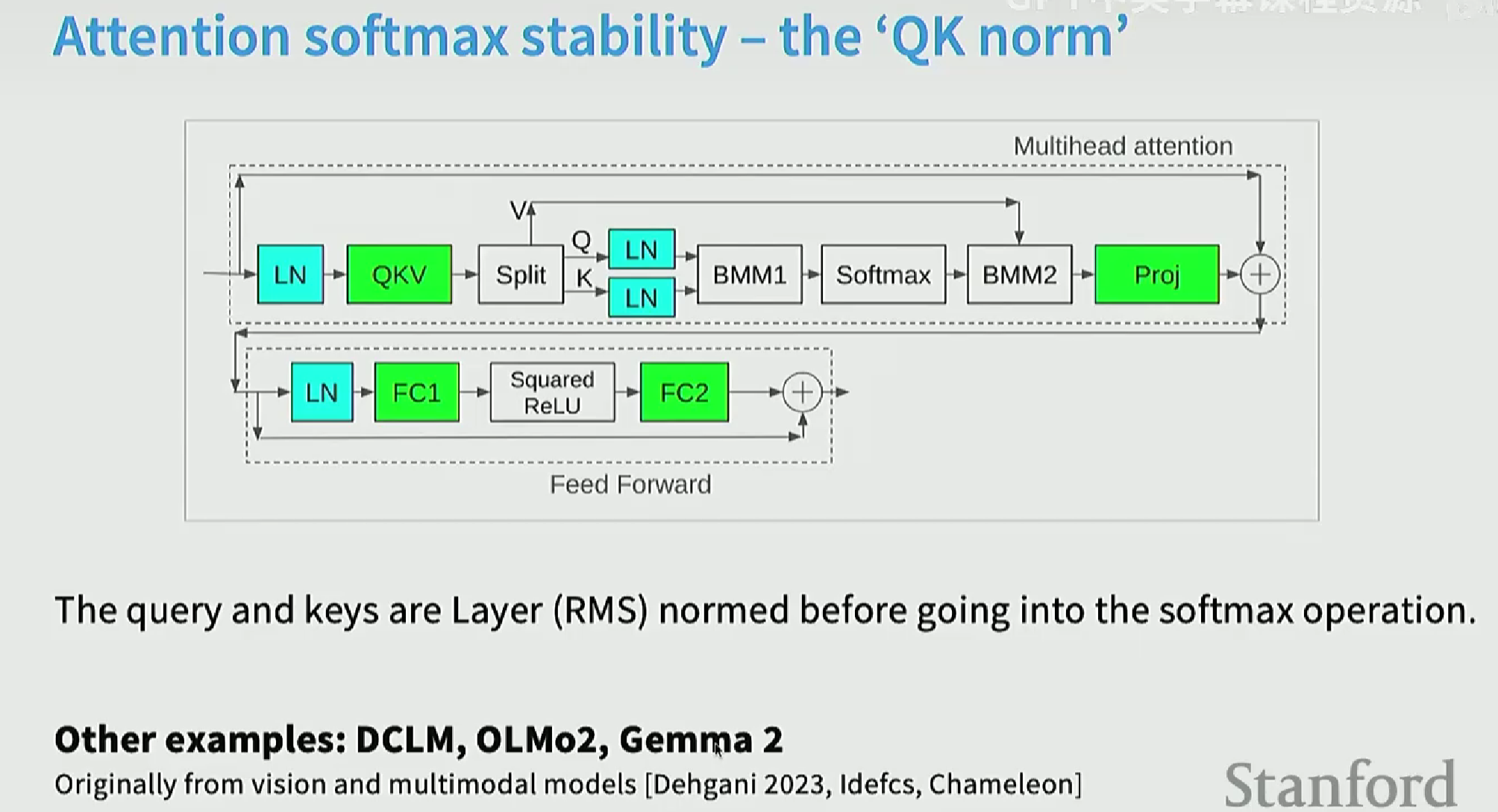
QK-norm(控制softmax的输入)
layernorm不断加加加加加到厌倦~
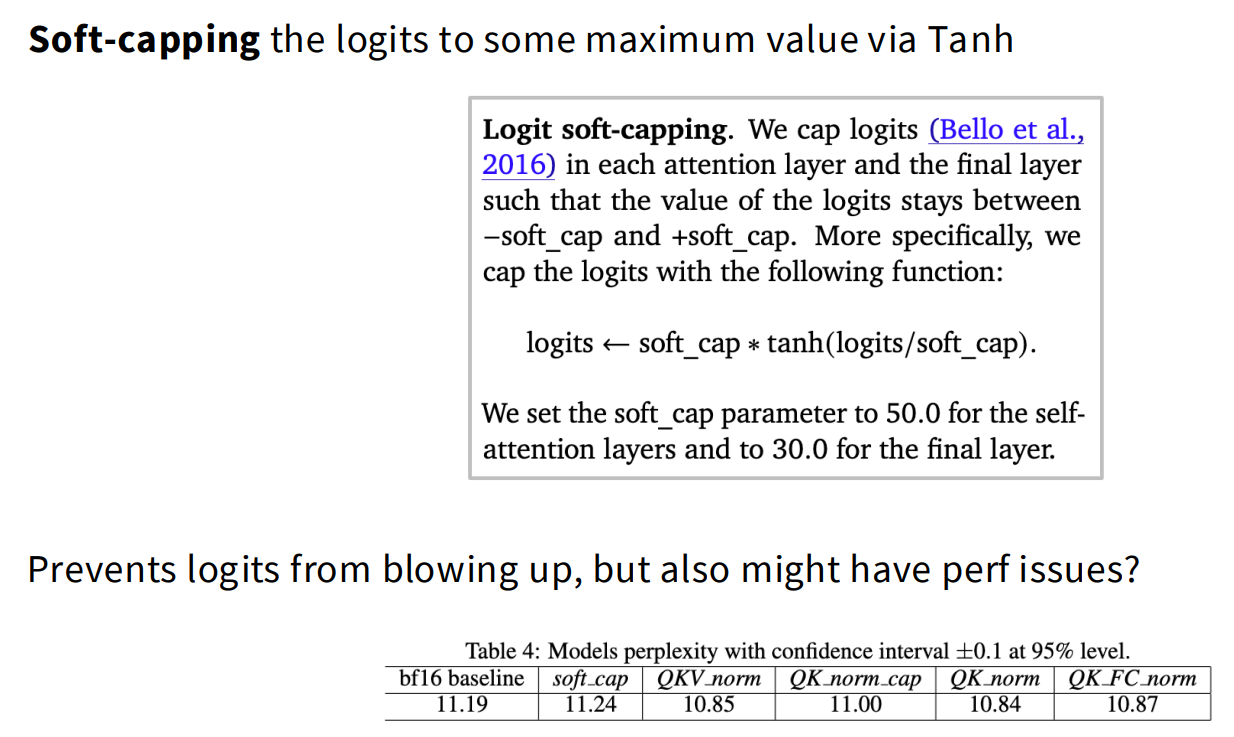
Logit soft-capping
总结:
Soft-capping是 "稳定性工具箱"中的一个(过时的)技巧。它虽然能有效防止NaN崩溃,但它既拖慢了训练速度 ,又损害了模型最终的质量 ,是一种"下下策"。它不如Z-Loss(质量中性)或QKV_norm(质量提升)等更现代的技巧。通常qk-norm的效果是最好的。
Attention heads
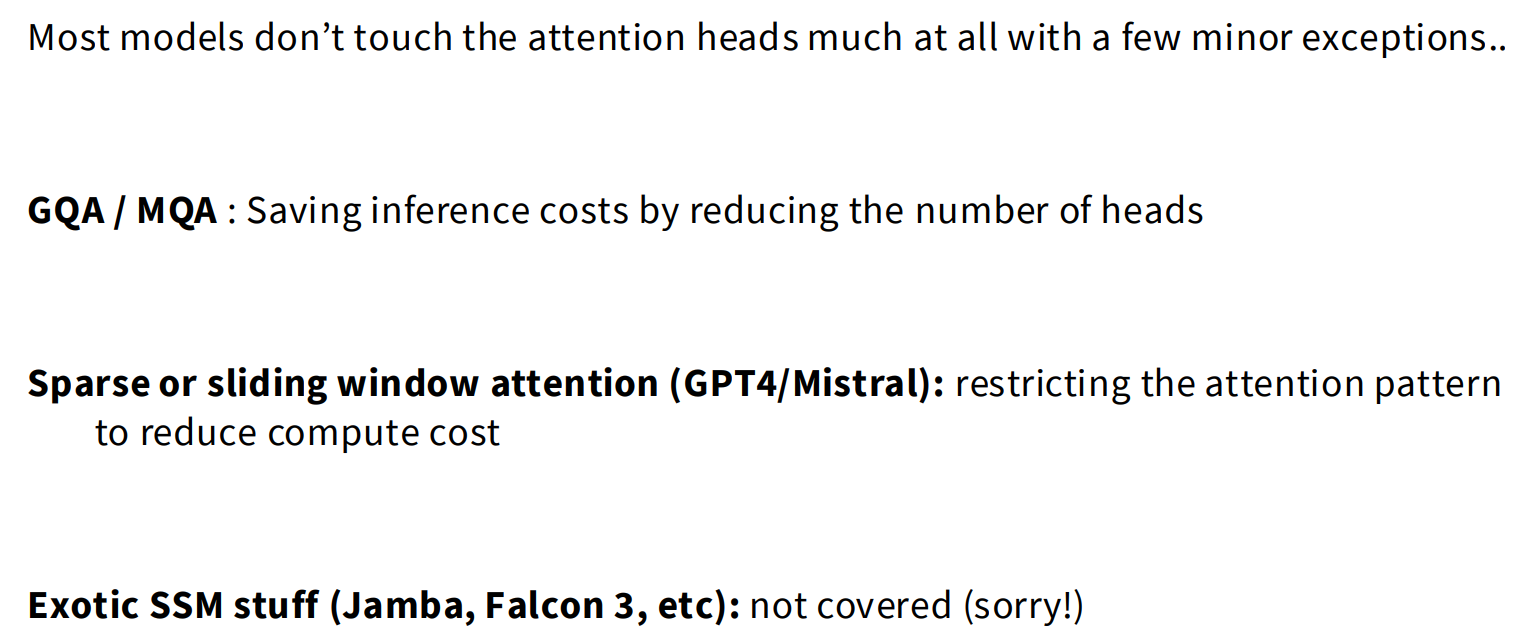
GQA/MQA -- Reducing attention head cost
(可以把之前整理的gqa和mqa内容结合起来整理)