KUKA机械臂使用EthernetKRL配置与C#上位机实现TCP通讯
一、准备工作
我这里是使用的库卡仿真软件进行测试。
准备工作:
1.安装EthernetKRL选项包
2.准备好KUKA Router软件
3.TCP通信助手
以下是详细步骤
二、机械臂端配置
1.安装EthernetKRL选项包
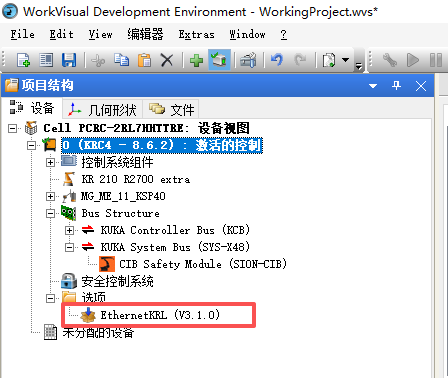
通过WorkVisual安装EthernetKRL选项包或者直接通过示教器进行安装,确保选项包安装完成。
2.修改配置文件
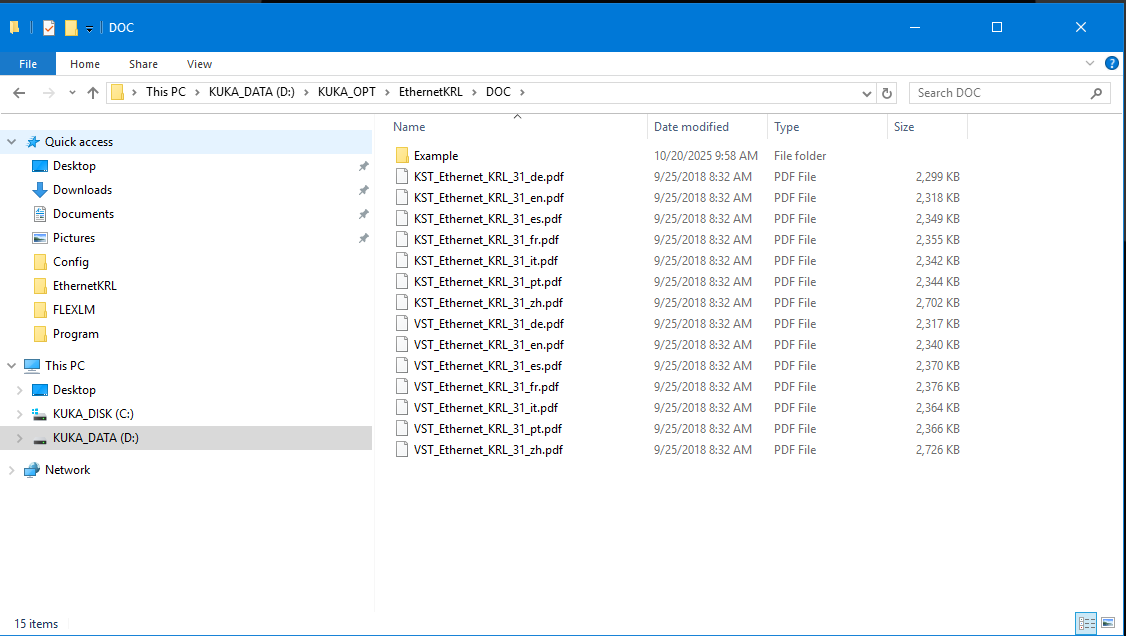
EthernetKRL选项包安装完成之后,D盘中会多一个D:\KUKA_OPT\EthernetKRL 目录,此目录包含有说明书,配置文件,以及示例程序。下图是说明书目录:D:\KUKA_OPT\EthernetKRL\DOC
 此D:\KUKA_OPT\EthernetKRL\DOC\Example目录下,有三个文件夹。Application里面包含一个上位机程序,Config里面包含6个xml文件,Program里面包含5个库卡的示例程序。如下下图所示:
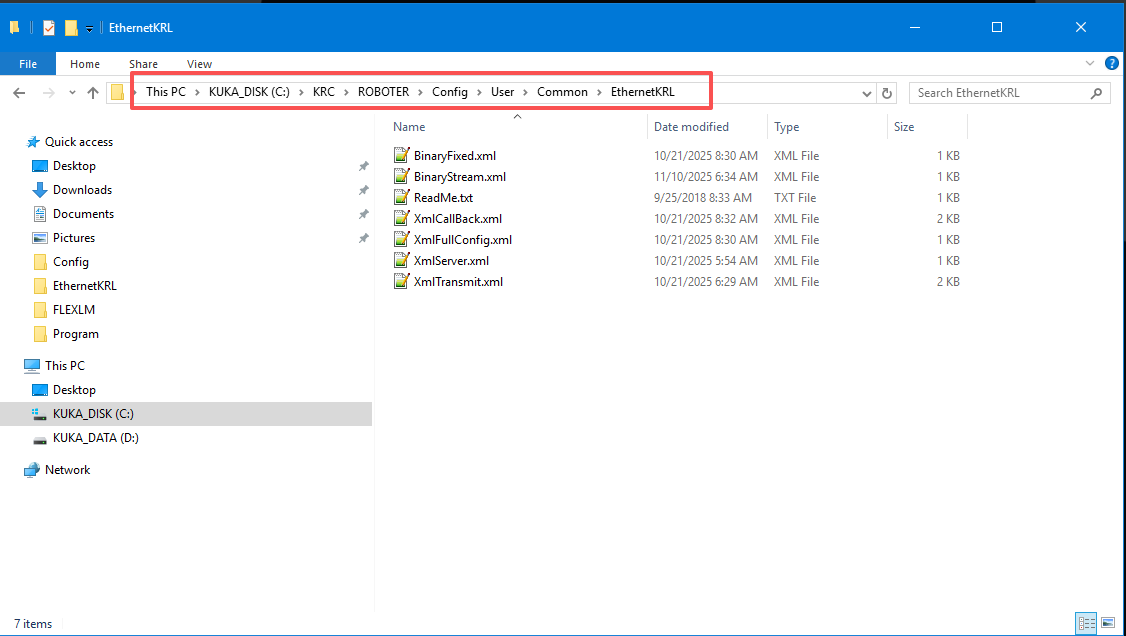
此D:\KUKA_OPT\EthernetKRL\DOC\Example目录下,有三个文件夹。Application里面包含一个上位机程序,Config里面包含6个xml文件,Program里面包含5个库卡的示例程序。如下下图所示: 将D:\KUKA_OPT\EthernetKRL\DOC\Example\Config 目录下的xml文件复制到C:\KRC\ROBOTER\Config\User\Common\EthernetKRL 目录下。想采用哪种通信方式,复制哪一种xml文件过去即可,我这里为了方便都复制过到cC盘目录下了。如下图所示:
将D:\KUKA_OPT\EthernetKRL\DOC\Example\Config 目录下的xml文件复制到C:\KRC\ROBOTER\Config\User\Common\EthernetKRL 目录下。想采用哪种通信方式,复制哪一种xml文件过去即可,我这里为了方便都复制过到cC盘目录下了。如下图所示: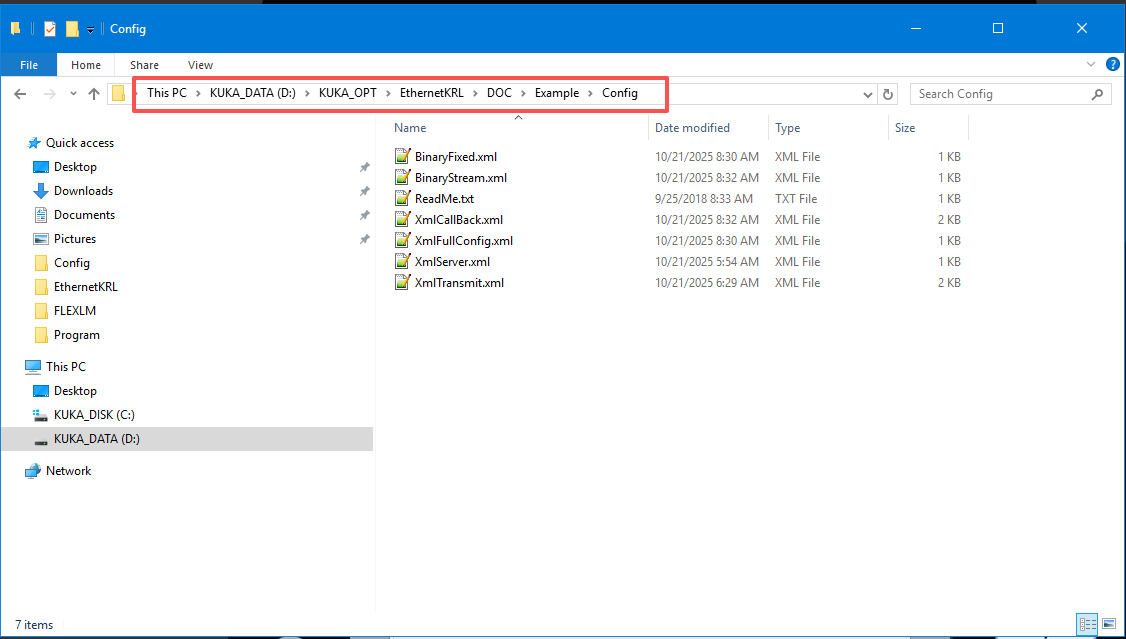
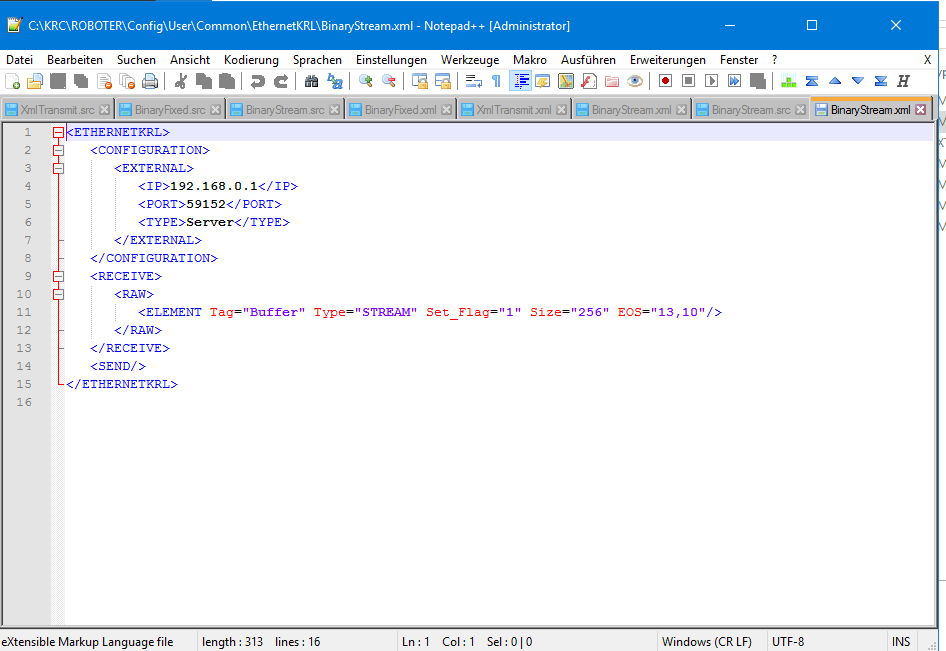
我这里采用的BinaryStream进行的测试。对BinaryStream.xml文件进行修改,我这里机器人作为客户端,TCP通讯助手作为服务器。原文件只进行了如下修改。
IP:192.168.0.1
PORT:59152
TYPE:Server
EOS="13,10"这一句代表字符串末尾需要为换行符(CR,LF或者0d,0a)。
(服务器IP地址实际为192.168.1.106,地址修改为真实的服务器地址反而还连接不上,查看其他资料,使用仿真的情况其他人也遇到过类似问题,将地址设为192.168.0.1就可以连接上服务器。待后续上实体机器人测试一下)。
以上步骤完成,机械臂端配置就已经完成。
三、测试
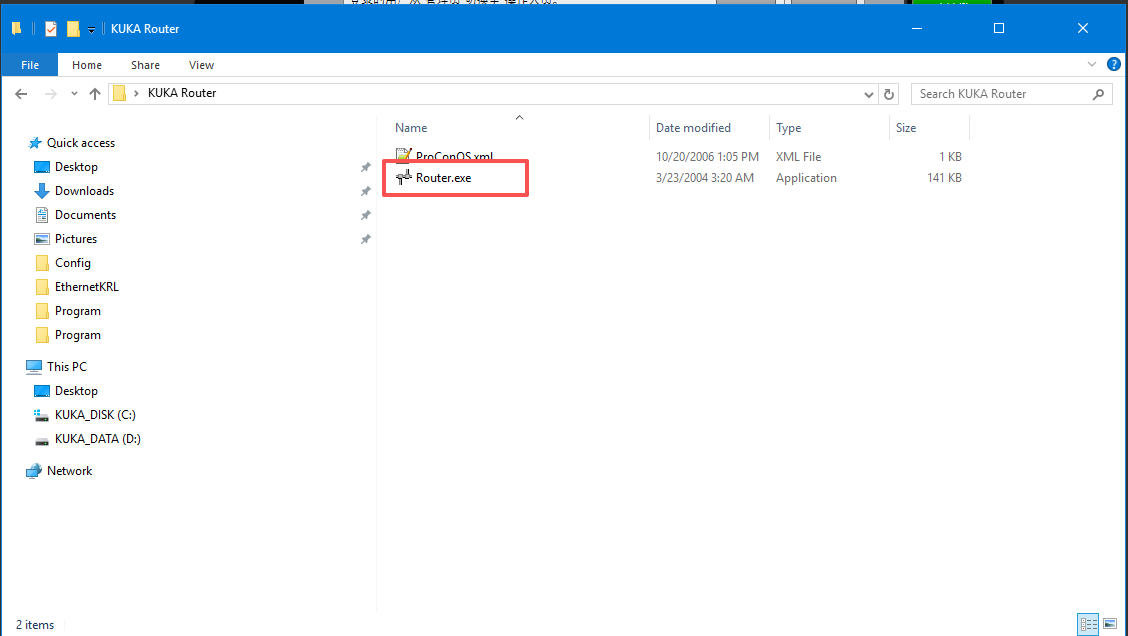
1.开启KUKA Router软件
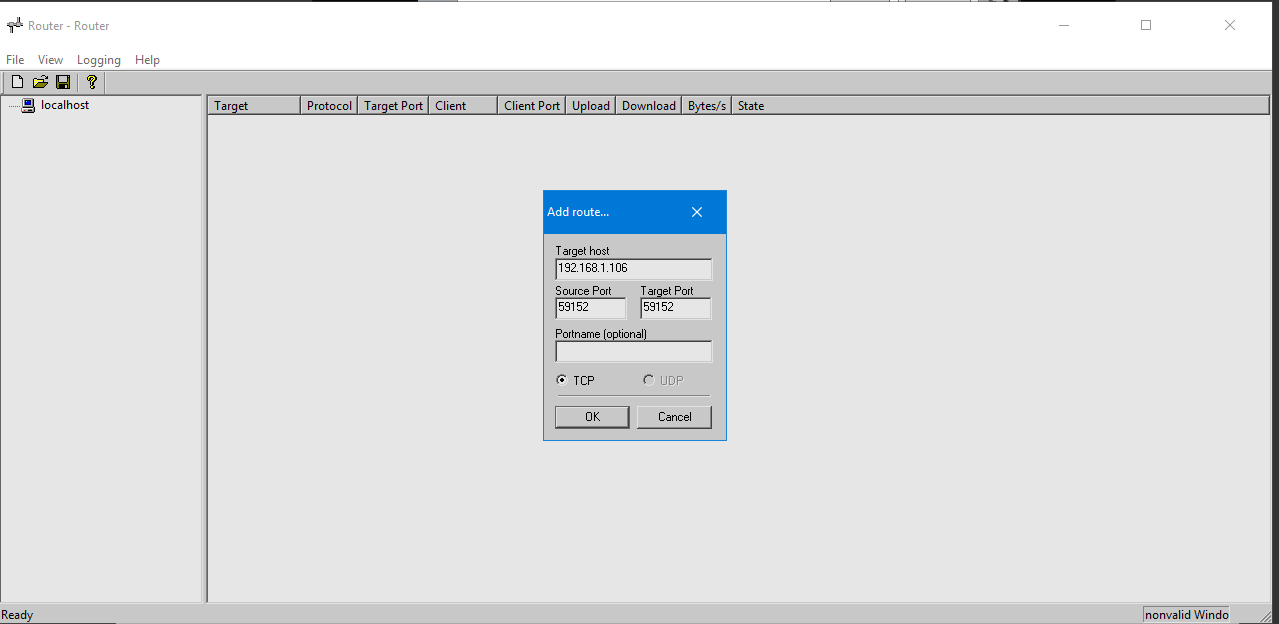
打开Router软件,只需要进行如下填写
Target host :192.168.1.106
Source Port :59152
Target Port会自动变为59152,填写ip地址的是使用数字键盘的小数点会变为逗号 ,确保IP地址和端口号没有错误。这一步没操作的话,进行仿真测试的时候,会显示连接不上。如下图所示:
2.选择并修改测试程序
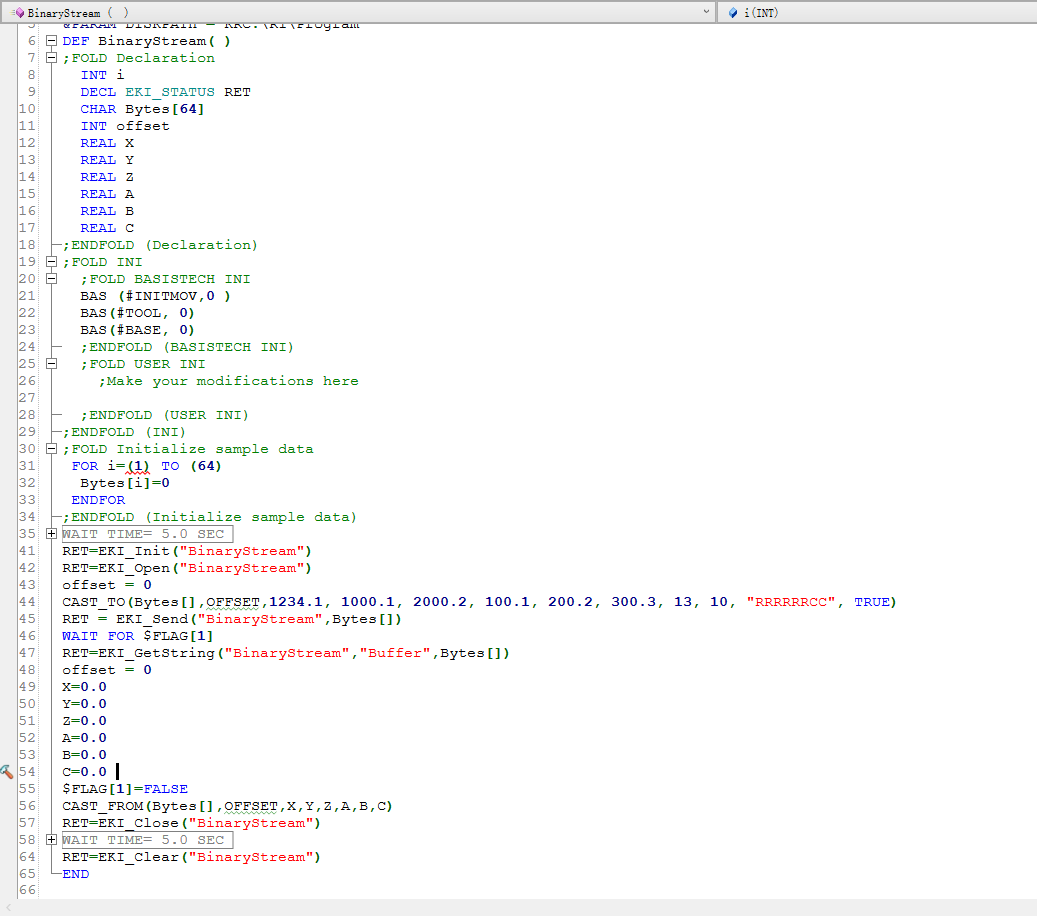
D:\KUKA_OPT\EthernetKRL\DOC\Example\Program此目录下给的示例程序之一BinaryStream.src如下图所示:
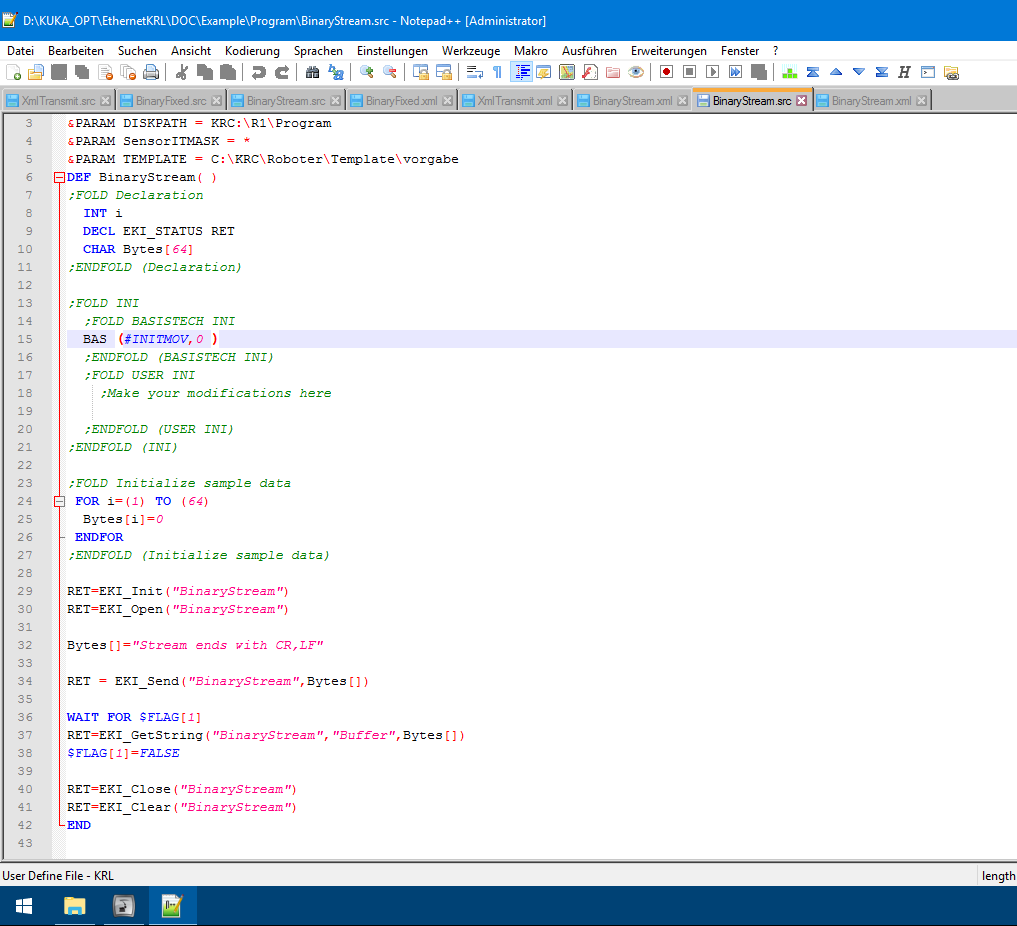
将这个程序复制到C:\KRC\ROBOTER\KRC\R1\Program 下,我们在示教器界面就可以直接选择程序并运行了。如下图所示:
示例程序是发送一个字符串,我这里将示例程序进行了修改,发送一组数据给服务器,并接受服务器发来的数据。
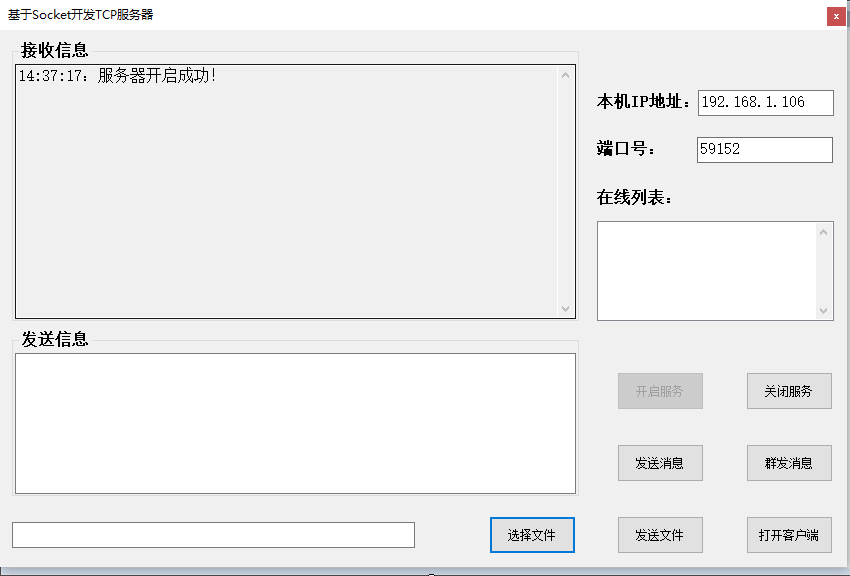
3.开启TCP通讯助手
开启服务器。
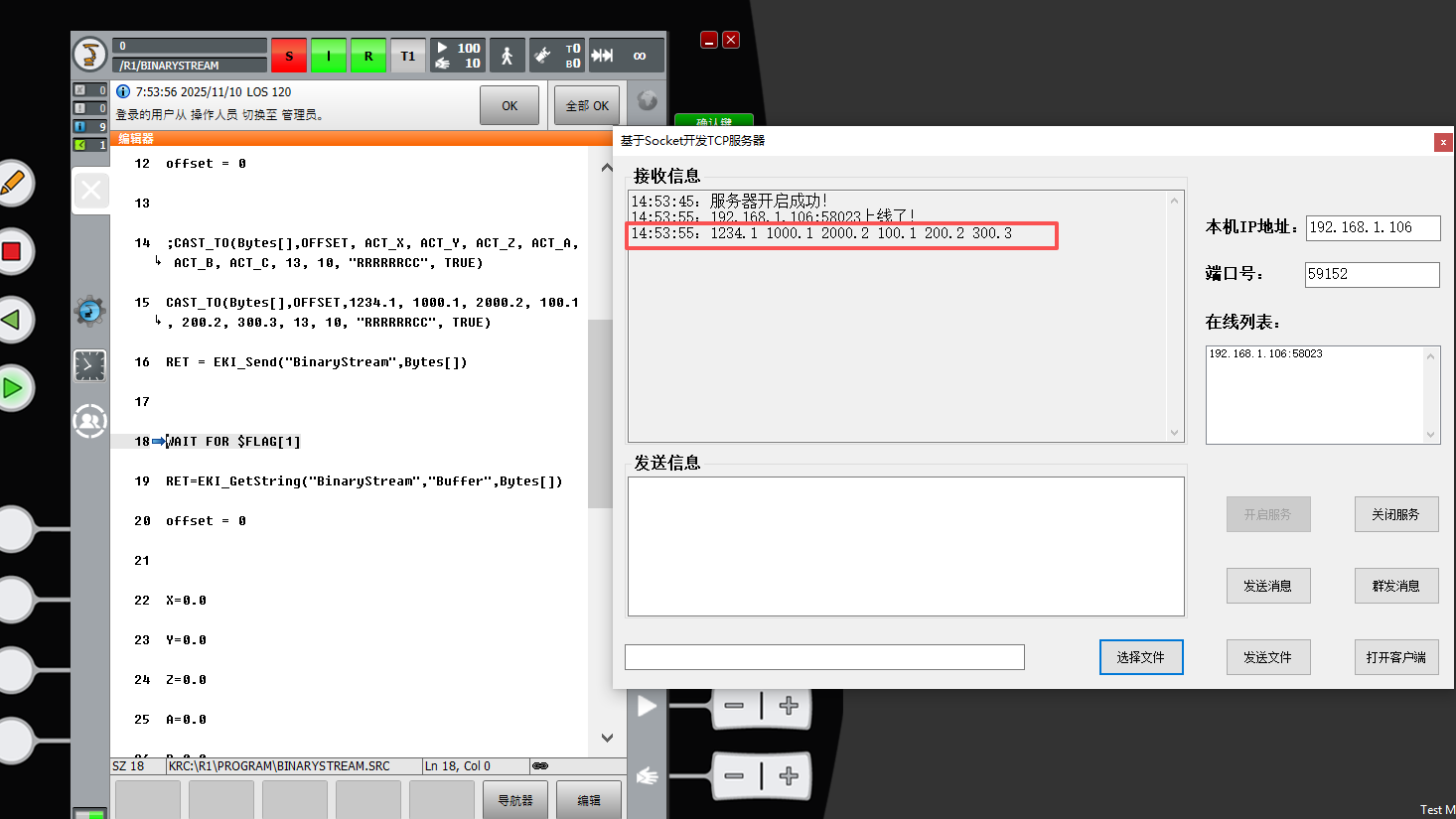
4.运行机械臂程序并查看数据
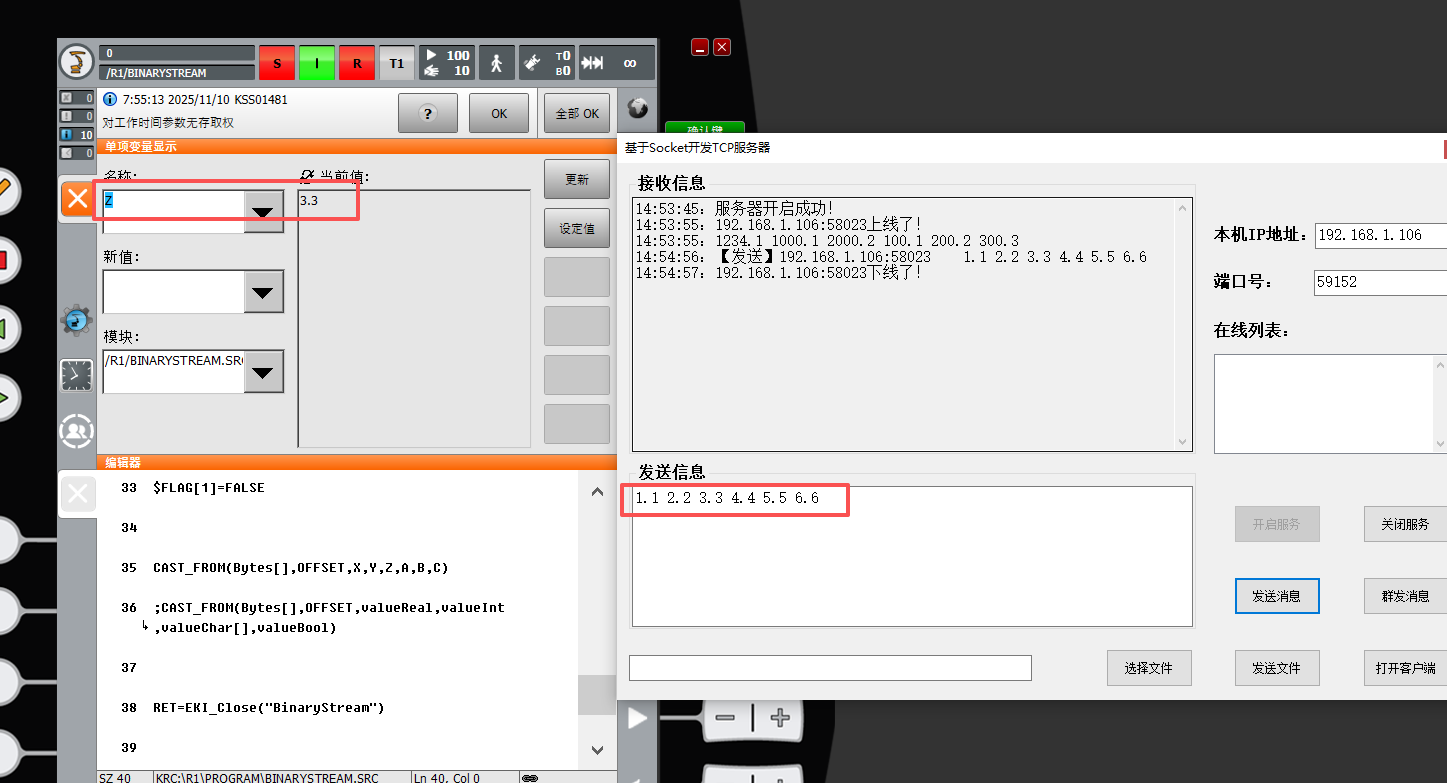
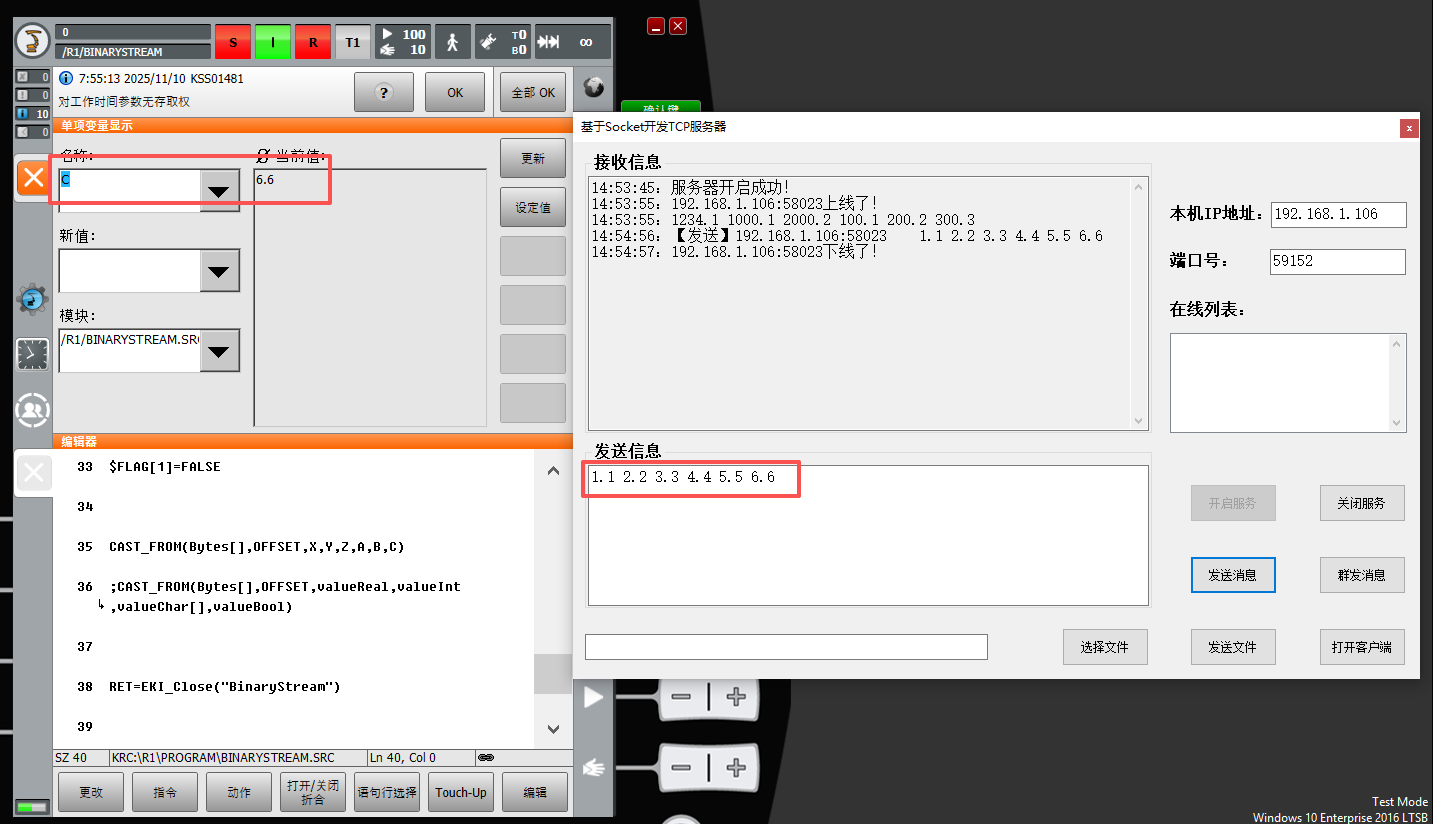
此时机械臂已经将数据发到服务器,一直处于等待服务器发数据的状态中,如下图所示:
我通过服务器下发1.1 2.2 3.3 4.4 5.5 6.6给机械臂,机械臂将这几个浮点数分别赋值给X,Y,Z,A,B,C,通过监控机械臂变量,可以看到数据已经传递过来了。