1.前置条件使用wsl2安装ubuntu系统,在powershell中可以正常打开,这一步不再赘述
2.下载Xlunch
VcXsrv Windows X Server download | SourceForge.net
直接下载安装,可以自定义为不在c盘安装,之后打开
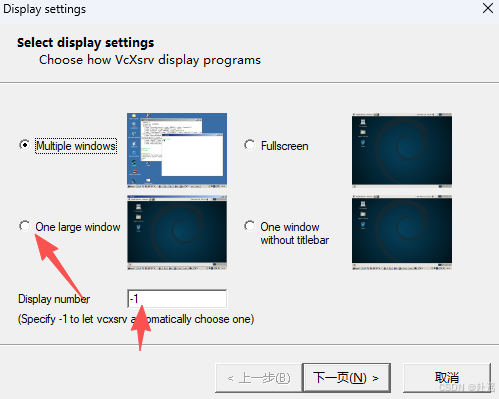
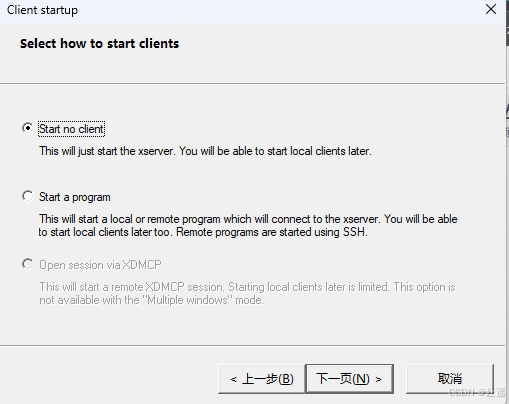
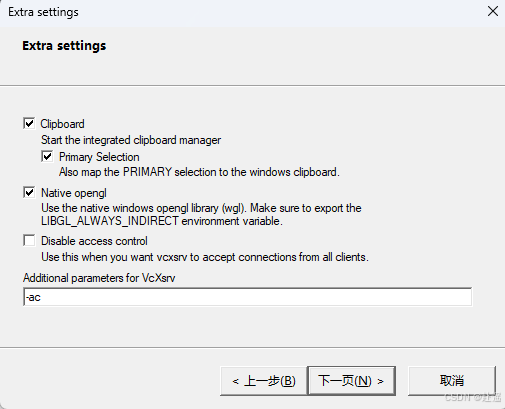
之后直接完成,运行出现黑页面即可,不可关掉,挂着
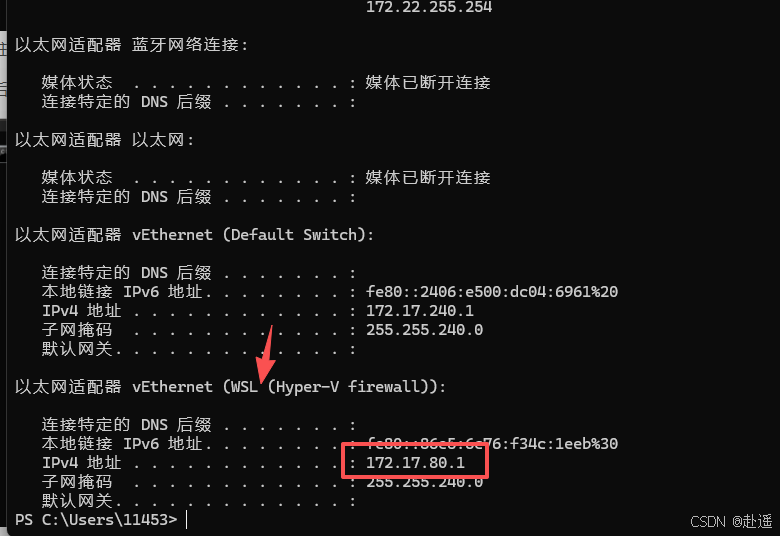
3.查找wsl2下ubuntu的ipv4的ip地址
打开powershell终端,输入ipconfig,找到wsl的以太网ipv4地址:
4.之后进入ubuntu终端页面
先运行一下命令更新软件包
sudo apt update
sudo apt upgrade
sudo apt install build-essential
sudo apt install xfce4然后使用nano文件系统打开~/.bashrc这个文件
nano ~/.bashrc运行命令打开之后出现文件内容,移动到最后一行
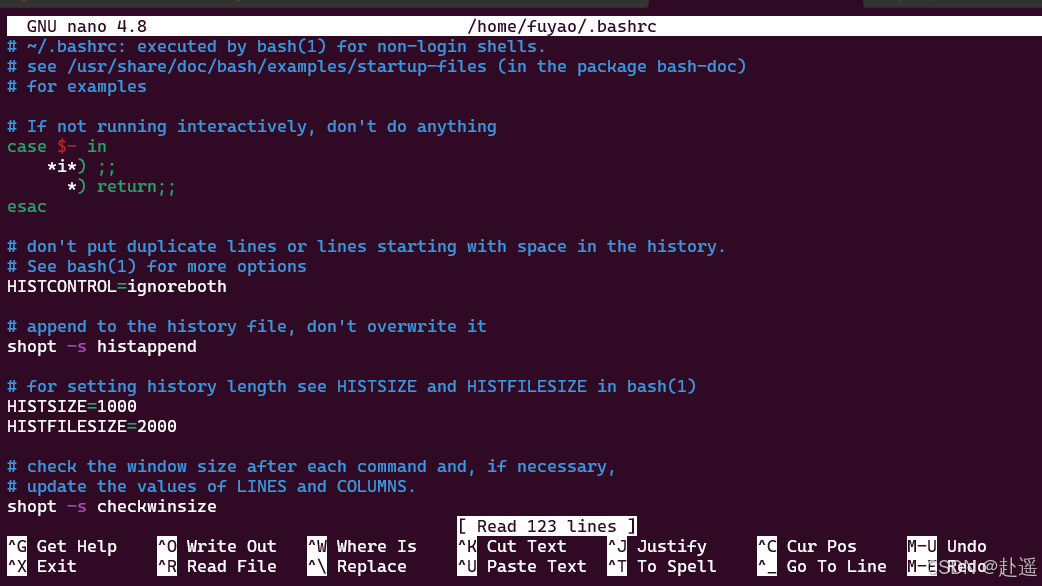
最后一行添加如下内容并保存():
export DISPLAY=172.17.80.1:0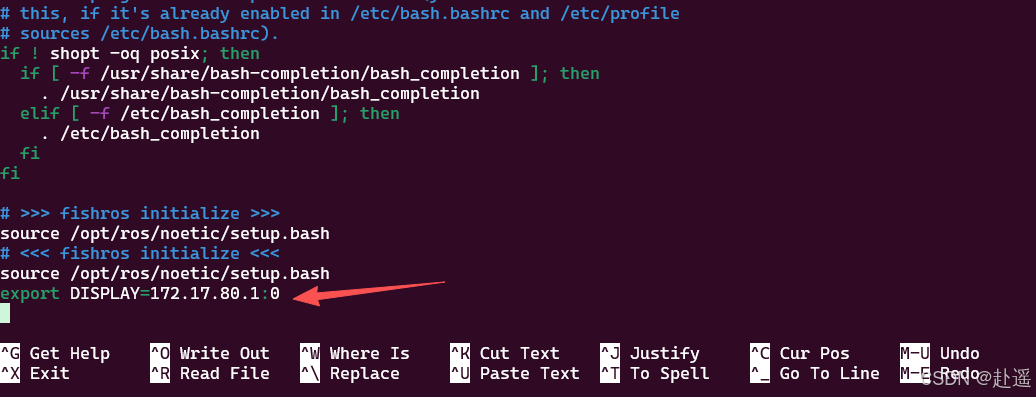
使用快捷键ctrl+x保存,输入y确认。
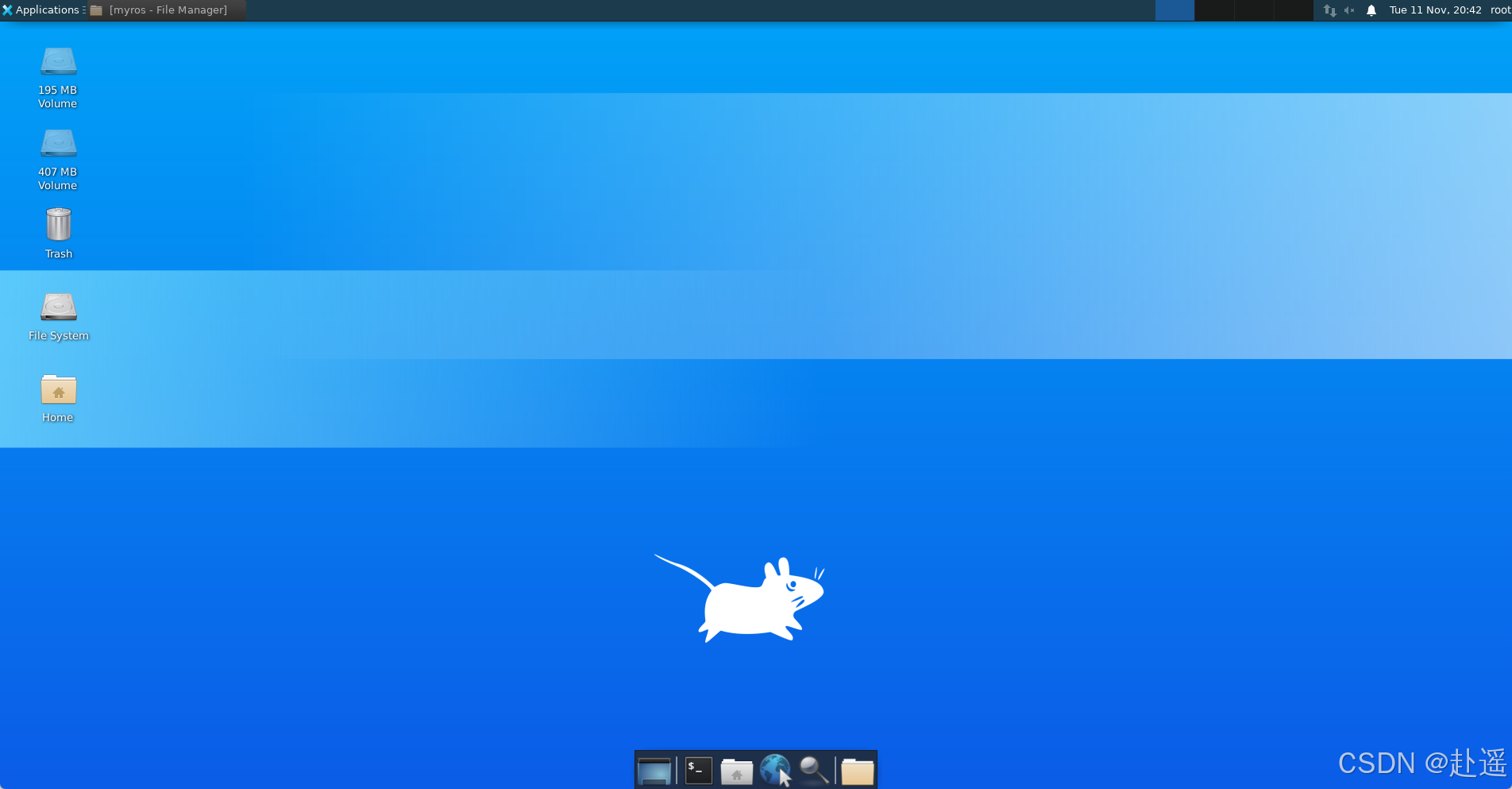
5.之后在ubuntu终端中运行xfce4命令即可
sudo startxfce4效果: