一、原理介绍
利用一阶线性状态观测器与扩张状态观测器分别构建反电动势观测器以实现永磁同步电机无感控制。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
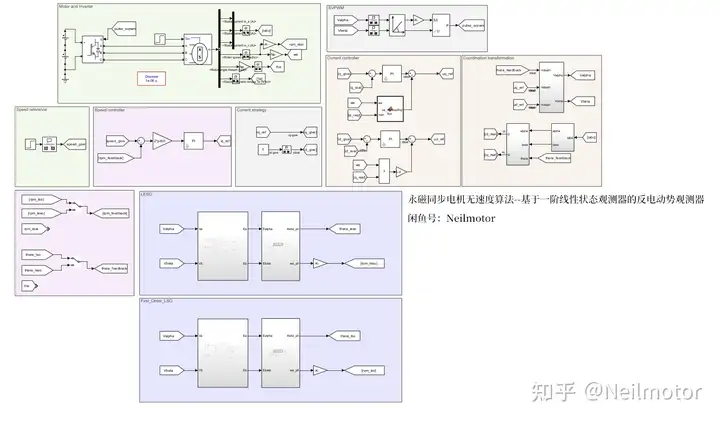
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载并且给定转速阶跃至1500rpm。采用带宽法配置LESO和LSO参数,保持两种观测器带宽相同。
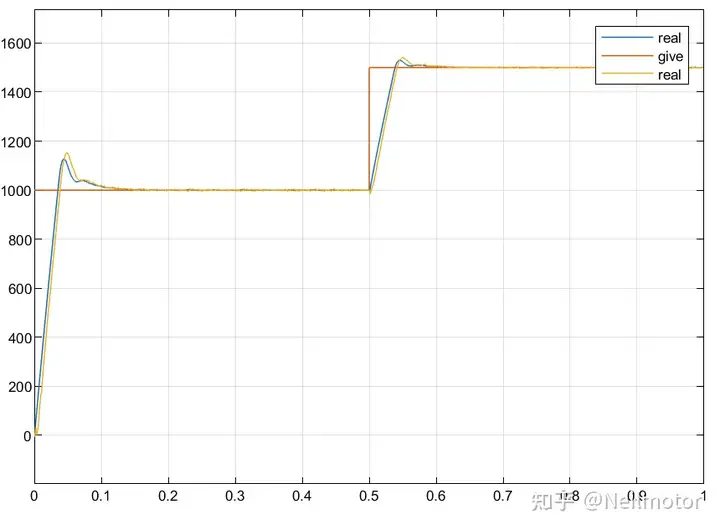
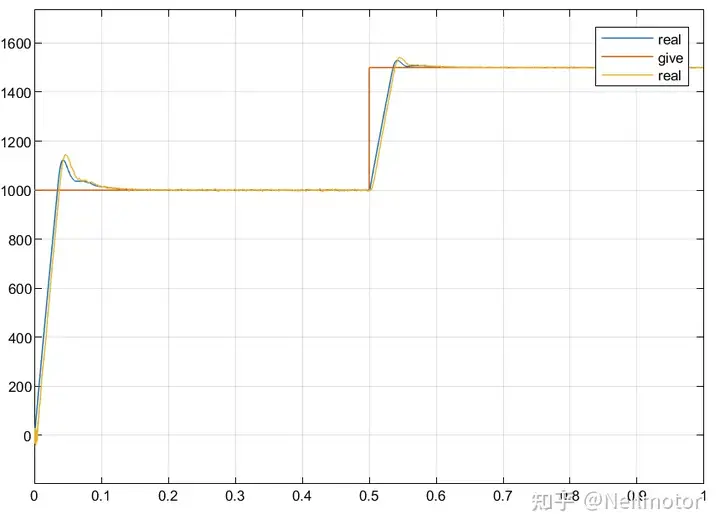
下面分别给出传统LESO和LEO的仿真波形。
2.1给定转速、实际转速和估计转速
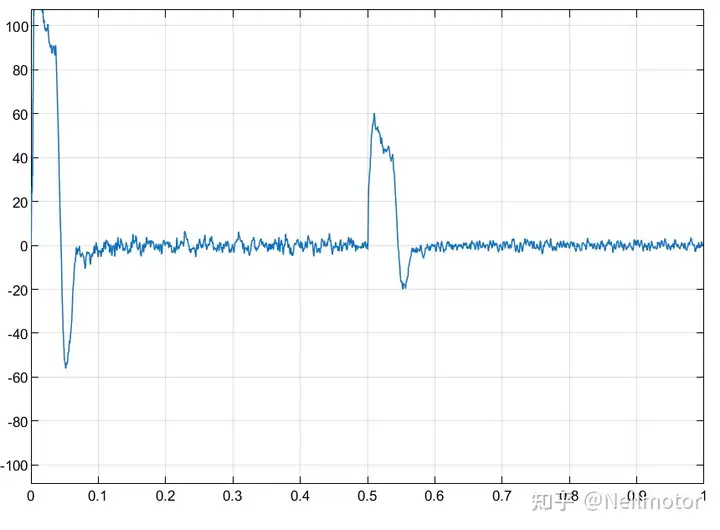
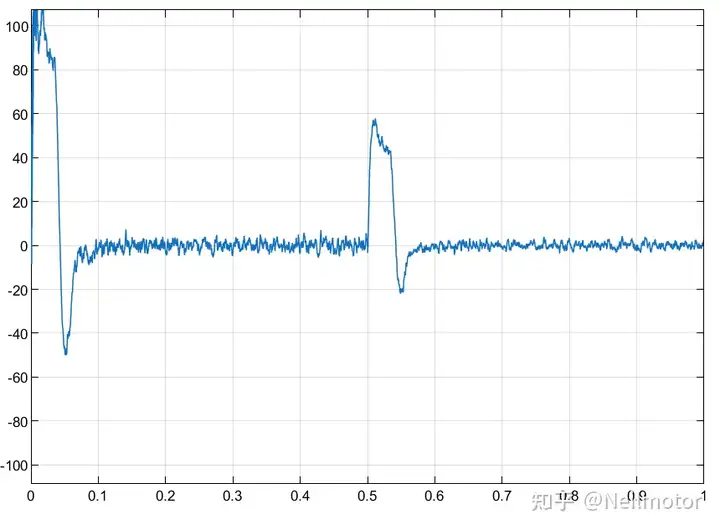
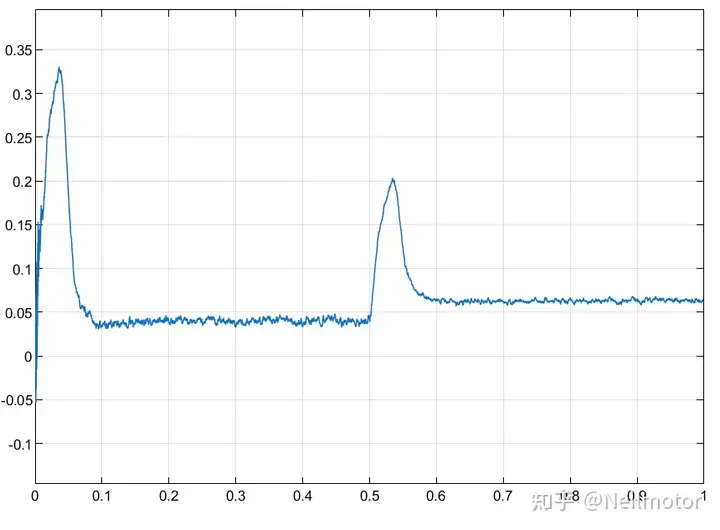
2.2估计转速与实际转速误差
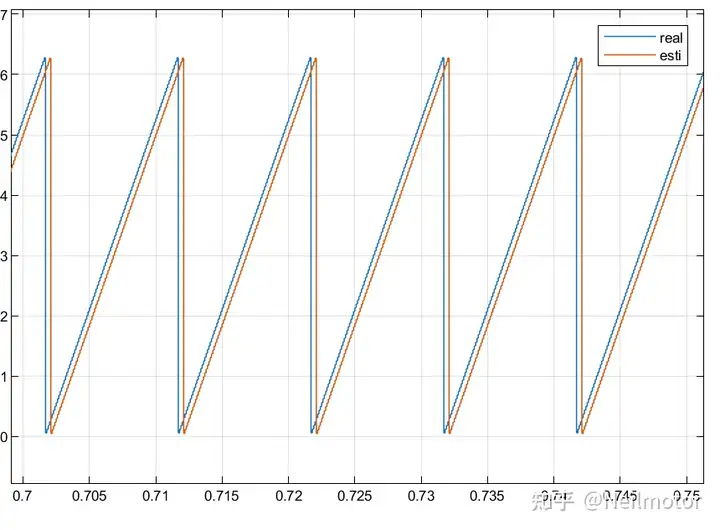
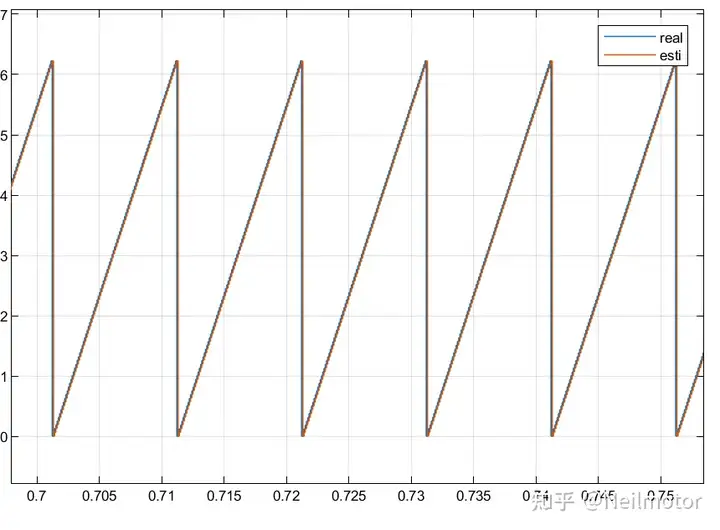
2.3 估计转角与实际转角
2.4估计转角与实际转角误差
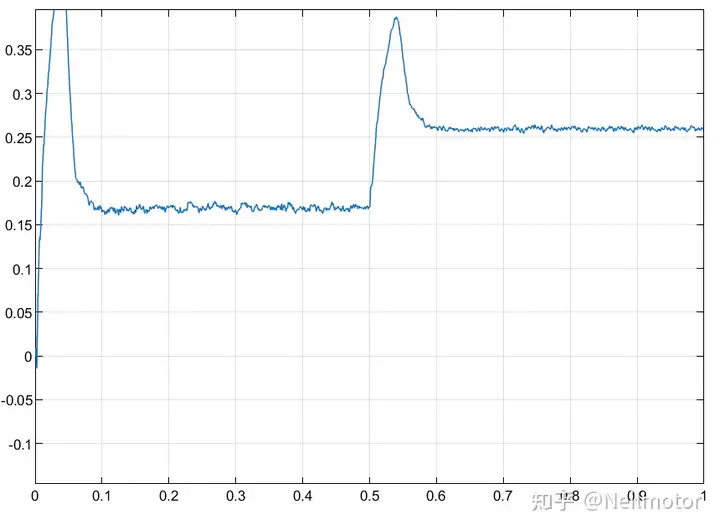
2.5估计反电动势
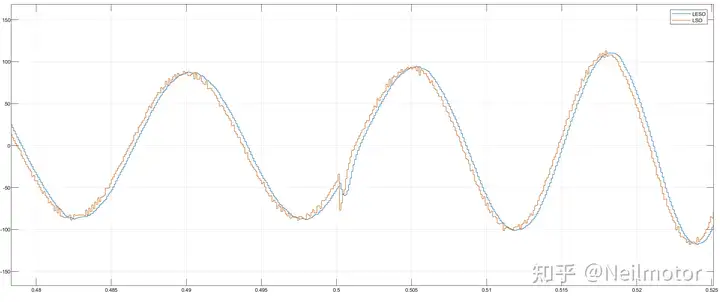
综上,可以总结出,一阶线性状态观测器在不额外引入转子位置补偿环节的情况下,转子位置误差更小,但是估计转速和转子位置的波形相较于扩张状态观测器跟大,并且在转速变化时扩张状态观测器跟踪反电动势性能更强。而参考文献中一阶线性状态观测器性能较差,我认为是文中给定的一阶线性状态观测器增益过小导致。