FPGA教程系列-Vivado中FIFO的简单仿真分析
本着看十遍不如操作一遍的原则,对FIFO进行一个简单的仿真,加深一下印象。
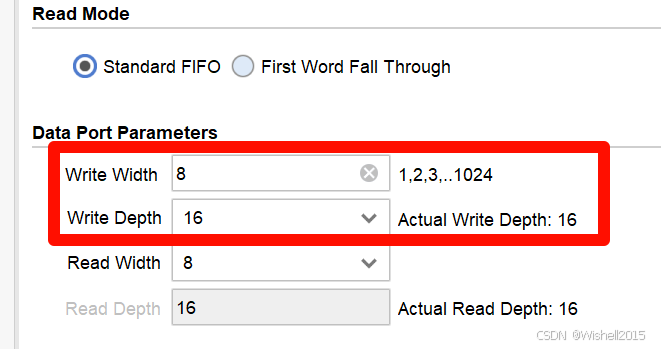
生成一个IP核:(8位,16深度,其他默认)
编写top文件:
verilog
`timescale 1ns / 1ps
module fifo_top(
input i_clk,
input i_rst,
input[7:0] i_din,
input i_wr_en,
input i_rd_en,
output o_full,
output o_empty,
output[7:0] o_dout
);
fifo_generator_0 fifo_generator_u (
.clk (i_clk), // input wire clk
.srst (i_rst), // input wire srst
.din (i_din), // input wire [7 : 0] din
.wr_en (i_wr_en), // input wire wr_en
.rd_en (i_rd_en), // input wire rd_en
.dout (o_dout), // output wire [7 : 0] dout
.full (o_full), // output wire full
.empty (o_empty) // output wire empty
);
endmodule 编写testbench:
verilog
`timescale 1ns / 1ps
module tb_fifo_top;
/* ---------------- 接口 ---------------- */
logic clk;
logic rst;
logic [7:0] din;
logic wr_en;
logic rd_en;
logic full;
logic empty;
logic [7:0] dout;
/* ---------------- 时钟 ---------------- */
initial begin
clk = 0;
forever #10 clk = ~clk;
end
/* ---------------- 激励 ---------------- */
initial begin
rst = 1;
wr_en = 0;
rd_en = 0;
din = '0;
repeat(5) @(posedge clk);
rst = 0;
@(posedge clk);
// 1. 写满 16 字节
$display("\n[%.2f ns] Write 16 bytes", $time);
for (int i = 0; i < 16; i++) begin
@(posedge clk);
wr_en = 1;
din = i;
end
wr_en = 0;
@(posedge clk);
$display("[%.2f ns] full = %b", $time, full);
// 2. 读出 16 字节
$display("\n[%.2f ns] Read 16 bytes", $time);
for (int i = 0; i < 16; i++) begin
@(posedge clk);
rd_en = 1;
end
rd_en = 0;
@(posedge clk);
$display("[%.2f ns] empty = %b", $time, empty);
// 3. 交替写读 3 次
$display("\n[%.2f ns] Alternating write/read", $time);
repeat(3) begin
@(posedge clk);
wr_en = 1; din = $random; rd_en = 0;
@(posedge clk);
wr_en = 0; rd_en = 1;
end
rd_en = 0;
@(posedge clk);
#200;
$display("\n[%.2f ns] Done", $time);
$finish;
end
/* ---------------- 打印读出数据 ---------------- */
always @(posedge clk) begin
if (rd_en & ~empty)
$display("[%.2f ns] dout = %0d", $time, dout);
end
/* ---------------- 例化 DUT ---------------- */
fifo_top dut (
.i_clk (clk),
.i_rst (rst),
.i_din (din),
.i_wr_en (wr_en),
.i_rd_en (rd_en),
.o_full (full),
.o_empty (empty),
.o_dout (dout)
);
endmodule仿真分析:
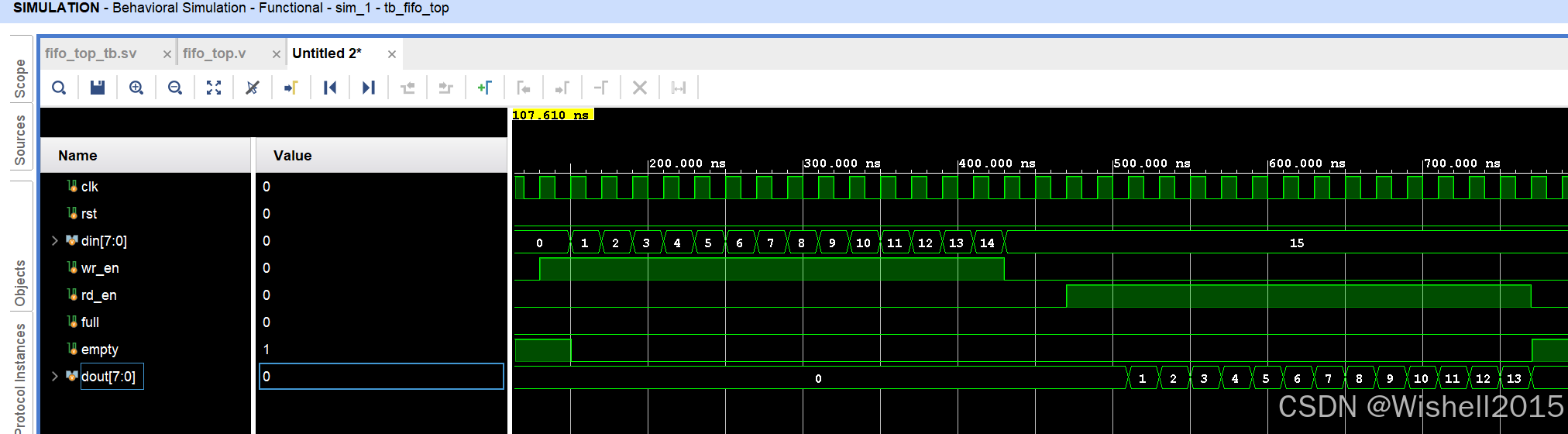
写入0-14数据,读出0-14.
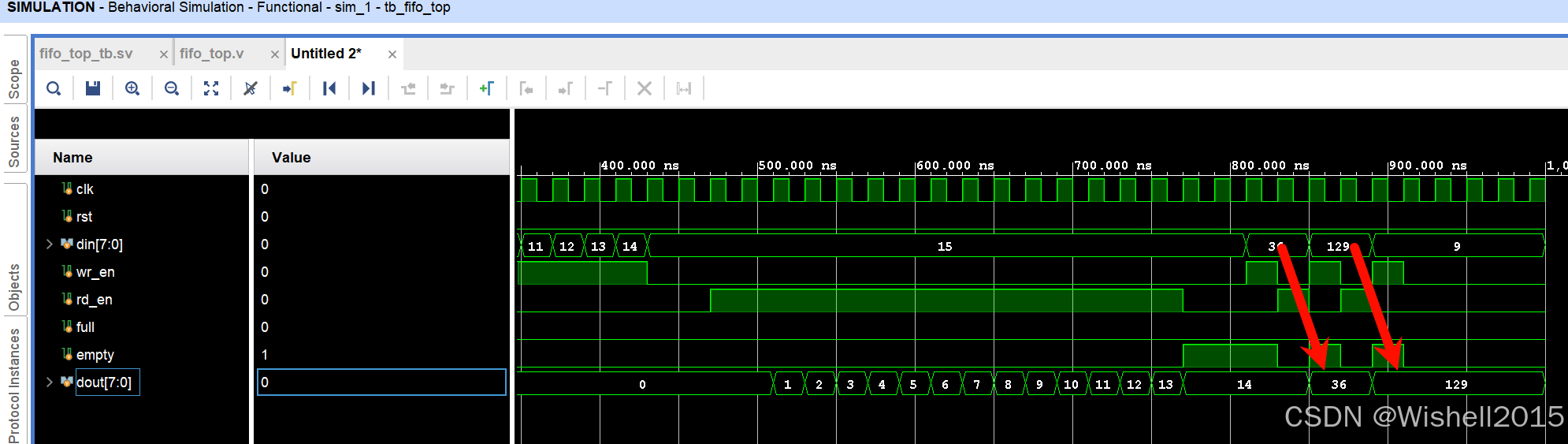
分别写入36,129并读出。
有心力的可以试试异步的fifo等等。。
工程文件:https://download.csdn.net/download/fantasygwh2015/92276755