该模型在仿真场景中为无人机实现了航点跟踪与避障功能,接收一组航点信息,并通过 三维向量场直方图改进算法(3D VFH+)规划出无障碍物的飞行路径。
控制行中直接运行命令:
matlab
>> Scenario = uavScenario("UpdateRate",100,"ReferenceLocation",[0 0 0]);
>>
>> openExample('uav/UAVObstacleAvoidanceInSimulinkExample')
>> addMesh(Scenario,"cylinder",{[0 0 1] [0 .01]},[0 1 0]);
>> InitialPosition = [0 0 -7];
InitialOrientation = [0 0 0];
>> platUAV = uavPlatform("UAV",Scenario, ...
"ReferenceFrame","NED", ...
"InitialPosition",InitialPosition, ...
"InitialOrientation",eul2quat(InitialOrientation));
>> updateMesh(platUAV,"quadrotor",{1.2},[0 0 1],eul2tform([0 0 pi]));
>> AzimuthResolution = 0.5;
ElevationResolution = 2;
>> MaxRange = 7;
AzimuthLimits = [-179 179];
ElevationLimits = [-15 15];
>> LidarModel = uavLidarPointCloudGenerator("UpdateRate",10, ...
"MaxRange",MaxRange, ...
"RangeAccuracy",3, ...
"AzimuthResolution",AzimuthResolution, ...
"ElevationResolution",ElevationResolution, ...
"AzimuthLimits",AzimuthLimits, ...
"ElevationLimits",ElevationLimits, ...
"HasOrganizedOutput",true);
>> uavSensor("Lidar",platUAV,LidarModel, ...
"MountingLocation",[0 0 -0.4], ...
"MountingAngles",[0 0 180]);
>> show3D(Scenario);
>> show3D(Scenario);
>> ObstaclePositions = [10 0; 20 10; 10 20]; % Locations of the obstacles
ObstacleHeight = 15; % Height of the obstacles
ObstaclesWidth = 3; % Width of the obstacles
for i = 1:size(ObstaclePositions,1)
addMesh(Scenario,"polygon", ...
{[ObstaclePositions(i,1)-ObstaclesWidth/2 ObstaclePositions(i,2)-ObstaclesWidth/2; ...
ObstaclePositions(i,1)+ObstaclesWidth/2 ObstaclePositions(i,2)-ObstaclesWidth/2; ...
ObstaclePositions(i,1)+ObstaclesWidth/2 ObstaclePositions(i,2)+ObstaclesWidth/2; ...
ObstaclePositions(i,1)-ObstaclesWidth/2 ObstaclePositions(i,2)+ObstaclesWidth/2], ...
[0 ObstacleHeight]},0.651*ones(1,3));
end
show3D(Scenario);
legend("Start Position","Obstacles")
>> ObstaclePositions = [10 0; 20 10; 10 20]; % Locations of the obstacles
ObstacleHeight = 15; % Height of the obstacles
ObstaclesWidth = 3; % Width of the obstacles
for i = 1:size(ObstaclePositions,1)
addMesh(Scenario,"polygon", ...
{[ObstaclePositions(i,1)-ObstaclesWidth/2 ObstaclePositions(i,2)-ObstaclesWidth/2; ...
ObstaclePositions(i,1)+ObstaclesWidth/2 ObstaclePositions(i,2)-ObstaclesWidth/2; ...
ObstaclePositions(i,1)+ObstaclesWidth/2 ObstaclePositions(i,2)+ObstaclesWidth/2; ...
ObstaclePositions(i,1)-ObstaclesWidth/2 ObstaclePositions(i,2)+ObstaclesWidth/2], ...
[0 ObstacleHeight]},0.651*ones(1,3));
end
show3D(Scenario);
legend("Start Position","Obstacles")
>> open_system("ObstacleAvoidanceDemo.slx");
>> Waypoints = [InitialPosition; 0 20 -7; 20 20 -7; 20 0 -7];
>> for i = 2:size(Waypoints,1)
addMesh(Scenario,"cylinder",{[Waypoints(i,2) Waypoints(i,1) 1] [0 0.1]},[1 0 0]);
end
show3D(Scenario);
hold on
plot3([InitialPosition(1,2); Waypoints(:,2)],[InitialPosition(1,2); Waypoints(:,1)],[-InitialPosition(1,3); -Waypoints(:,3)],"-g")
legend(["Start Position","Obstacles","","","Waypoints","","","Direct Path"])
>> % Proportional Gains
Px = 6;
Py = 6;
Pz = 6.5;
% Derivative Gains
Dx = 1.5;
Dy = 1.5;
Dz = 2.5;
% Integral Gains
Ix = 0;
Iy = 0;
Iz = 0;
% Filter Coefficients
Nx = 10;
Ny = 10;
Nz = 14.4947065605712;
>> UAVSampleTime = 0.001;
Gravity = 9.81;
DroneMass = 0.1;
>> out = sim("ObstacleAvoidanceDemo.slx");
>> out = sim("ObstacleAvoidanceDemo.slx");
>> hold on
points = squeeze(out.trajectoryPoints(1,:,:))';
plot3(points(:,2),points(:,1),-points(:,3),"-r");
legend(["Start Position","Obstacles","","","Waypoints","","","Direct Path","UAV Trajectory"])❤️创建搭载自定义激光雷达传感器并含障碍物的无人机仿真场景
💗创建仿真场景
创建无人机仿真场景并设置其本地原点
matlab
Scenario = uavScenario("UpdateRate",100,"ReferenceLocation",[0 0 0]);添加标记以指示无人机的起始位姿。
matlab
addMesh(Scenario,"cylinder",{[0 0 1] [0 .01]},[0 1 0]);💗定义无人机平台
在北东地(NED)坐标系中指定无人机的初始位置与姿态。
matlab
InitialPosition = [0 0 -7];
InitialOrientation = [0 0 0];在情景中创建UAV平台
matlab
platUAV = uavPlatform("UAV",Scenario, ...
"ReferenceFrame","NED", ...
"InitialPosition",InitialPosition, ...
"InitialOrientation",eul2quat(InitialOrientation));添加四旋翼无人机网格模型以实现可视化展示。
matlab
updateMesh(platUAV,"quadrotor",{1.2},[0 0 1],eul2tform([0 0 pi]));💗创建并挂载传感器模型
指定激光雷达的分辨率。
matlab
AzimuthResolution = 0.5;
ElevationResolution = 2;指定激光雷达的探测距离。
matlab
MaxRange = 7;
AzimuthLimits = [-179 179];
ElevationLimits = [-15 15];创建统计传感器模型,为激光雷达生成点云数据。
matlab
LidarModel = uavLidarPointCloudGenerator("UpdateRate",10, ...
"MaxRange",MaxRange, ...
"RangeAccuracy",3, ...
"AzimuthResolution",AzimuthResolution, ...
"ElevationResolution",ElevationResolution, ...
"AzimuthLimits",AzimuthLimits, ...
"ElevationLimits",ElevationLimits, ...
"HasOrganizedOutput",true);创建激光雷达传感器并将其搭载于四旋翼无人机上。
matlab
uavSensor("Lidar",platUAV,LidarModel, ...
"MountingLocation",[0 0 -0.4], ...
"MountingAngles",[0 0 180]);使用3D函数显示场景
matlab
show3D(Scenario);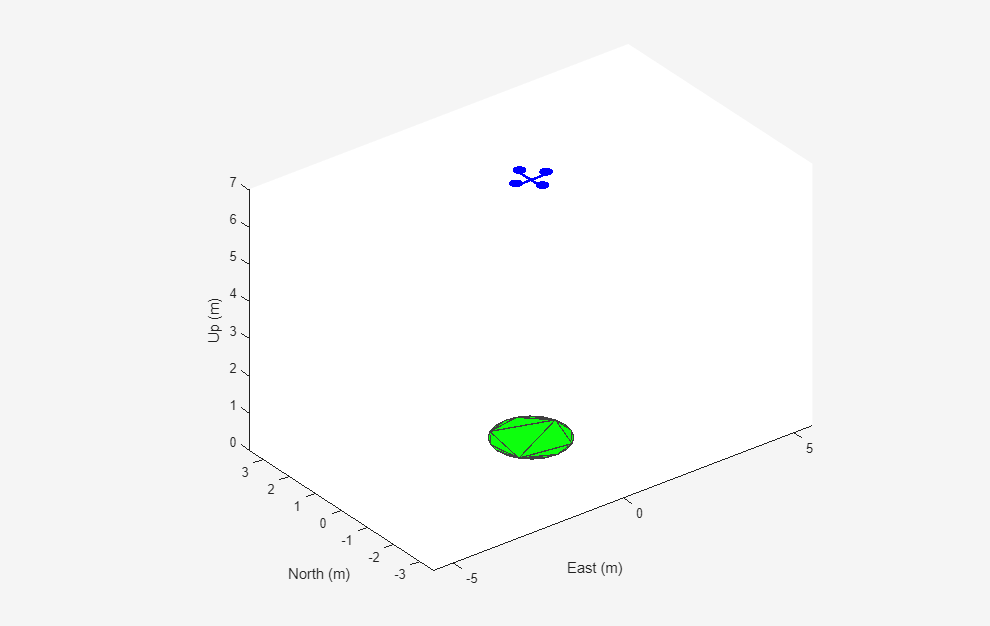
为场景添加障碍物
在场景中添加代表建筑物的长方体障碍物。
matlab
ObstaclePositions = [10 0; 20 10; 10 20]; % Locations of the obstacles
ObstacleHeight = 15; % Height of the obstacles
ObstaclesWidth = 3; % Width of the obstacles
for i = 1:size(ObstaclePositions,1)
addMesh(Scenario,"polygon", ...
{[ObstaclePositions(i,1)-ObstaclesWidth/2 ObstaclePositions(i,2)-ObstaclesWidth/2; ...
ObstaclePositions(i,1)+ObstaclesWidth/2 ObstaclePositions(i,2)-ObstaclesWidth/2; ...
ObstaclePositions(i,1)+ObstaclesWidth/2 ObstaclePositions(i,2)+ObstaclesWidth/2; ...
ObstaclePositions(i,1)-ObstaclesWidth/2 ObstaclePositions(i,2)+ObstaclesWidth/2], ...
[0 ObstacleHeight]},0.651*ones(1,3));
end
show3D(Scenario);
legend("Start Position","Obstacles")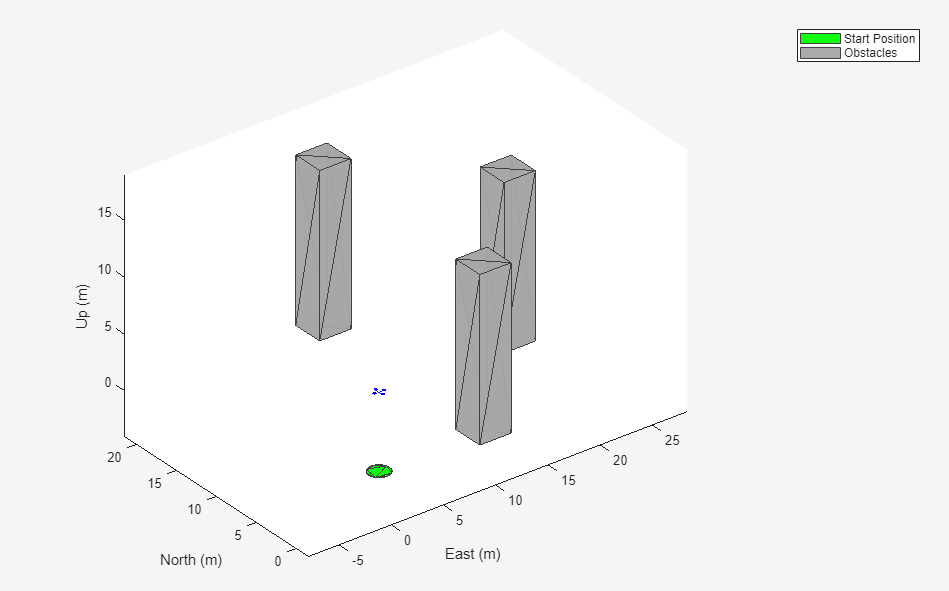
❤️模型概述
本模型包含以下核心组件:
- 无人机场景模块------配置场景并可视化飞行轨迹;
- 航点跟踪与避障模块------实现带避障功能的航点跟踪;
- 控制器与被控对象模块------无人机的位置控制器;
- 控制面板------通过该面板启用/关闭避障功能,同时调整避障前瞻距离。
matlab
open_system("ObstacleAvoidanceDemo.slx");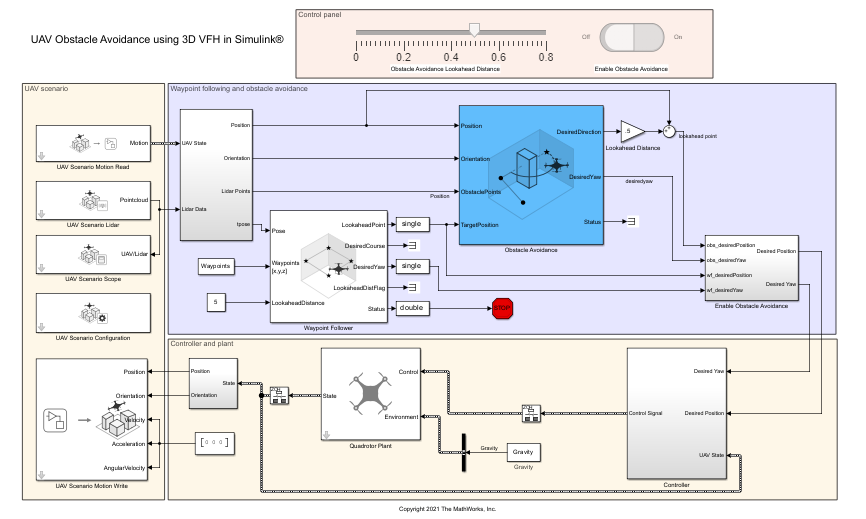
💗无人机场景模块
场景模块可完成场景配置,并对障碍物、飞行轨迹及激光雷达点云数据进行可视化展示。
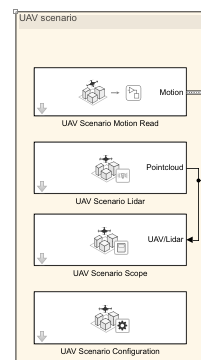
该子系统包含以下模块:
无人机场景配置------配置场景模块,将生成的场景用于仿真;
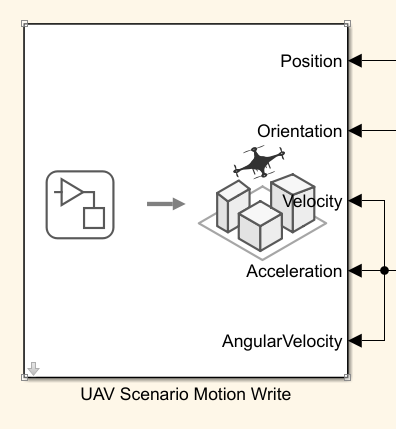
无人机场景运动读取------从场景中读取无人机当前状态;
无人机场景激光雷达------从场景中读取点云数据;
无人机场景运动写入------更新无人机新状态;
无人机场景观测窗------可视化无人机的飞行轨迹与激光雷达点云数据。
💗航点跟踪与避障
航点跟踪与避障子系统根据无人机当前状态和点云数据,求解无障碍物的期望位置与期望偏航角。
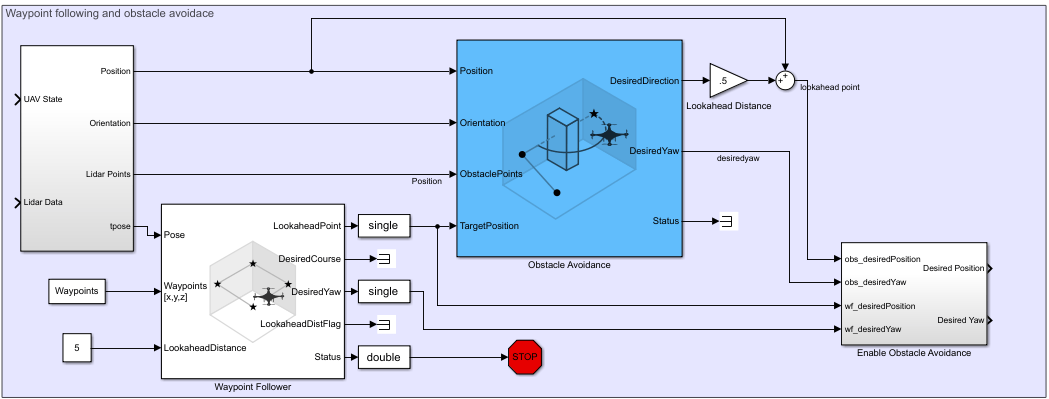
该子系统包含以下模块和子系统:
- 航点跟踪器------沿下一航点方向为无人机计算前瞻点;
- 避障模块------采用3D VFH+算法,求解无碰撞飞行所需的无障方向与偏航角,并更新航点跟踪器模块计算得到的前瞻点;
- 转换子系统------控制飞行过程中避障功能的调用频率,同时完成其他数据类型及坐标变换的转换工作;
- 前瞻距离------常量模块,其数值与期望方向的单位向量相乘后,叠加至无人机当前位置,以此计算期望位置;
- 避障使能子系统------实现避障功能的开启与关闭;
- 航点组------无人机规划飞行途经的所有航点集合,用于为无人机指定飞行航点。
matlab
Waypoints = [InitialPosition; 0 20 -7; 20 20 -7; 20 0 -7];Add markers to indicate the waypoints.
matlab
for i = 2:size(Waypoints,1)
addMesh(Scenario,"cylinder",{[Waypoints(i,2) Waypoints(i,1) 1] [0 0.1]},[1 0 0]);
end
show3D(Scenario);
hold on
plot3([InitialPosition(1,2); Waypoints(:,2)],[InitialPosition(1,2); Waypoints(:,1)],[-InitialPosition(1,3); -Waypoints(:,3)],"-g")
legend(["Start Position","Obstacles","","","Waypoints","","","Direct Path"])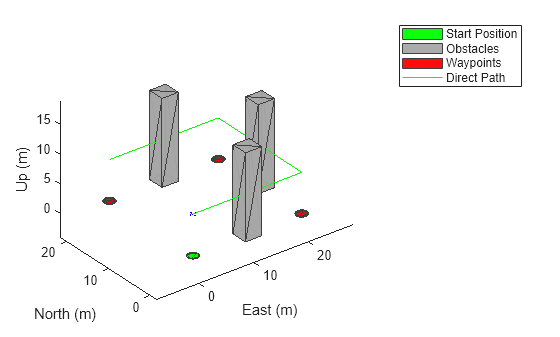
💗控制器与被控对象
控制器与被控对象子系统根据前瞻点生成控制指令,并更新无人机的状态。
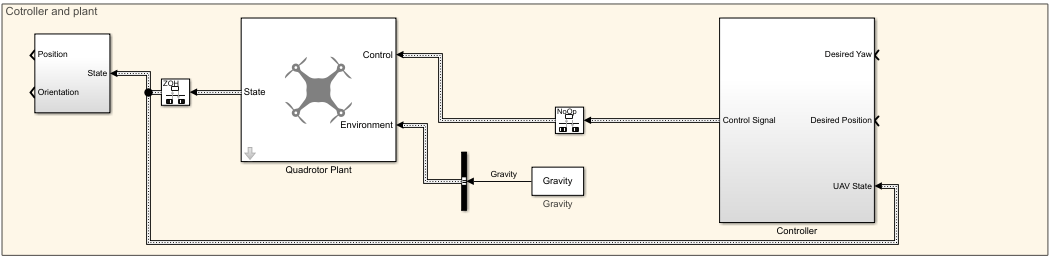
该子系统包含以下模块:
- 控制器------该子系统解算控制指令(横滚、俯仰、偏航、推力),驱动无人机飞向期望位置,采用多PID控制环实现位置控制。
- 四旋翼飞行器被控对象------该制导模型模块根据控制指令更新无人机状态。
- 转换模块------该子系统从无人机状态中提取位置与姿态信息,并完成数据格式及坐标变换,以适配可视化需求。
需配置控制器参数,此类参数基于试凑法整定,可通过调参实现更平稳的飞行效果。
matlab
% Proportional Gains
Px = 6;
Py = 6;
Pz = 6.5;
% Derivative Gains
Dx = 1.5;
Dy = 1.5;
Dz = 2.5;
% Integral Gains
Ix = 0;
Iy = 0;
Iz = 0;
% Filter Coefficients
Nx = 10;
Ny = 10;
Nz = 14.4947065605712; 为控制器和被控对象模块设定重力、无人机质量及采样时间参数。
matlab
UAVSampleTime = 0.001;
Gravity = 9.81;
DroneMass = 0.1;💗 控制面板
开关用于启用或禁用由避障模块对前瞻点的更新功能。
滑动条用于调整计算前瞻点时所使用的前瞻距离。

- 前瞻距离越大,无人机的飞行速度越快,但其与障碍物发生碰撞的风险也越高。
- 前瞻距离越小,飞行速度则越慢,碰撞障碍物的风险也相应更低。
模型仿真
完成模型配置并运行,观察无人机的飞行运动状态。
- 无人机将沿规划航点飞行并完成避障,仿真随即结束。
- 可调整前瞻距离以改变无人机的飞行速度,
- 也可修改避障模块的参数,观察飞行路径的变化规律。
matlab
out = sim("ObstacleAvoidanceDemo.slx");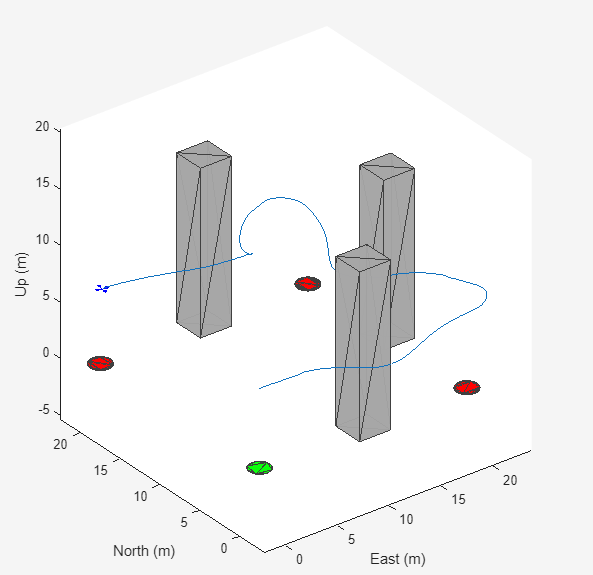
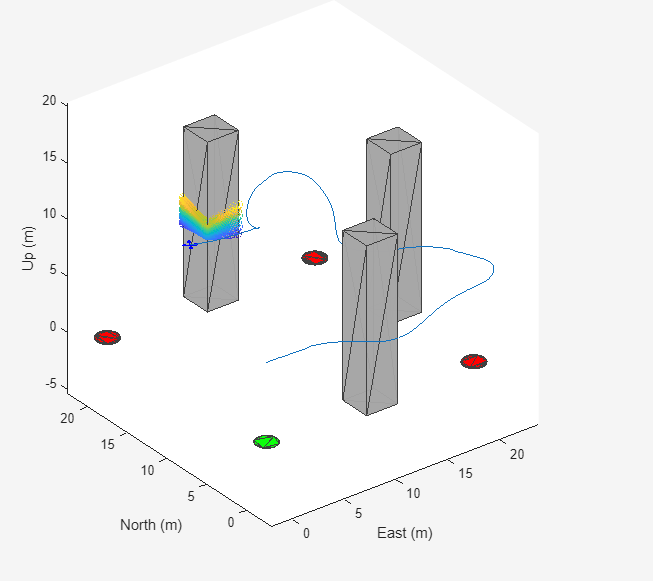
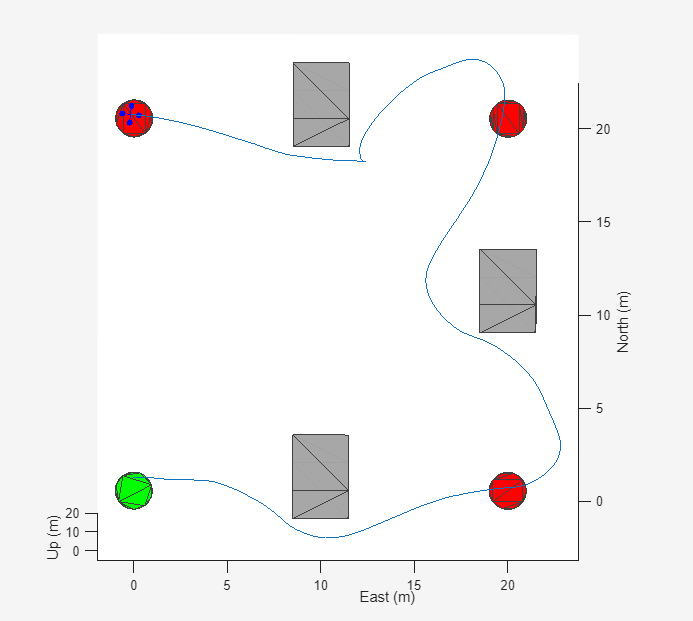
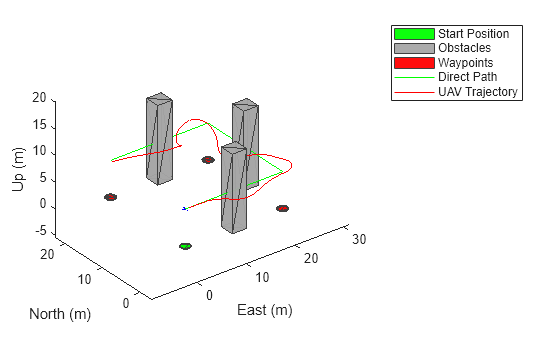
可视化无人机无障飞行轨迹
绘制无人机实际飞行轨迹与规划航点,直观展示避障功能对无人机飞行的影响。
matlab
hold on
points = squeeze(out.trajectoryPoints(1,:,:))';
plot3(points(:,2),points(:,1),-points(:,3),"-r");
legend(["Start Position","Obstacles","","","Waypoints","","","Direct Path","UAV Trajectory"])