论文下载:https://arxiv.org/pdf/2308.10468
代码下载:https://github.com/taohan10200/STEERER
HRNet论文下载:https://arxiv.org/pdf/1909.11065.pdf
MMCV代码:https://github.com/open-mmlab/mmcv
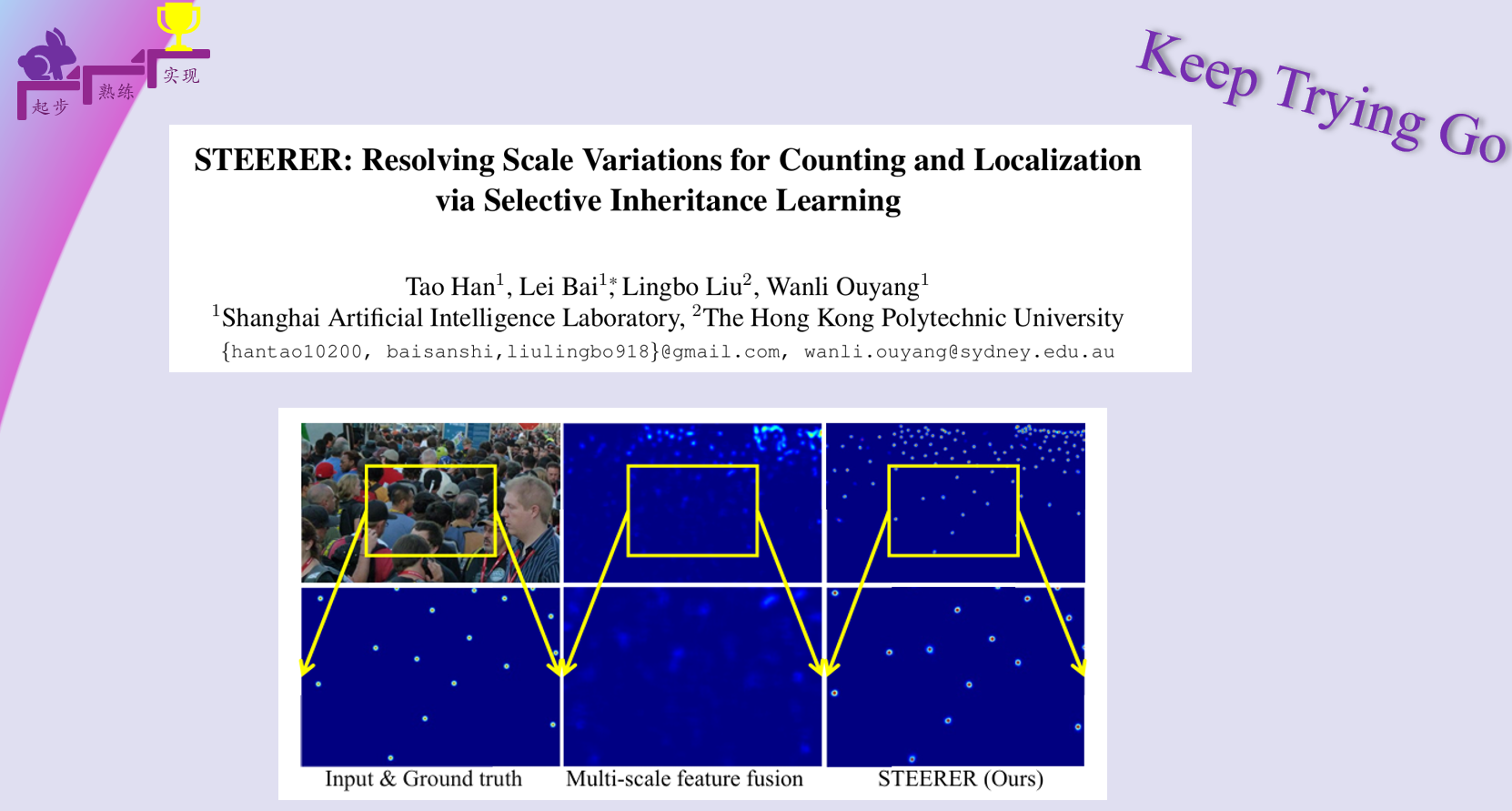
本文提出STEERER模型,通过选择性继承学习实现多尺度特征融合。模型采用FSIA算法从低到高分辨率融合特征,并使用CAM方法显示各尺度特征区域。实验表明,该模型在人群计数,车辆(TRANCOS)和玉米计数(MTC)任务中表现优异。可视化结果显示STEERER在生成密度图和定位方面优于基线模型,尤其擅长检测大型和小而密集的物体。跨域测试证实模型具有良好可移植性,适用于车辆、树木等多种场景的定位和计数任务。
目录
[Patch-Winner 选择方法](#Patch-Winner 选择方法)
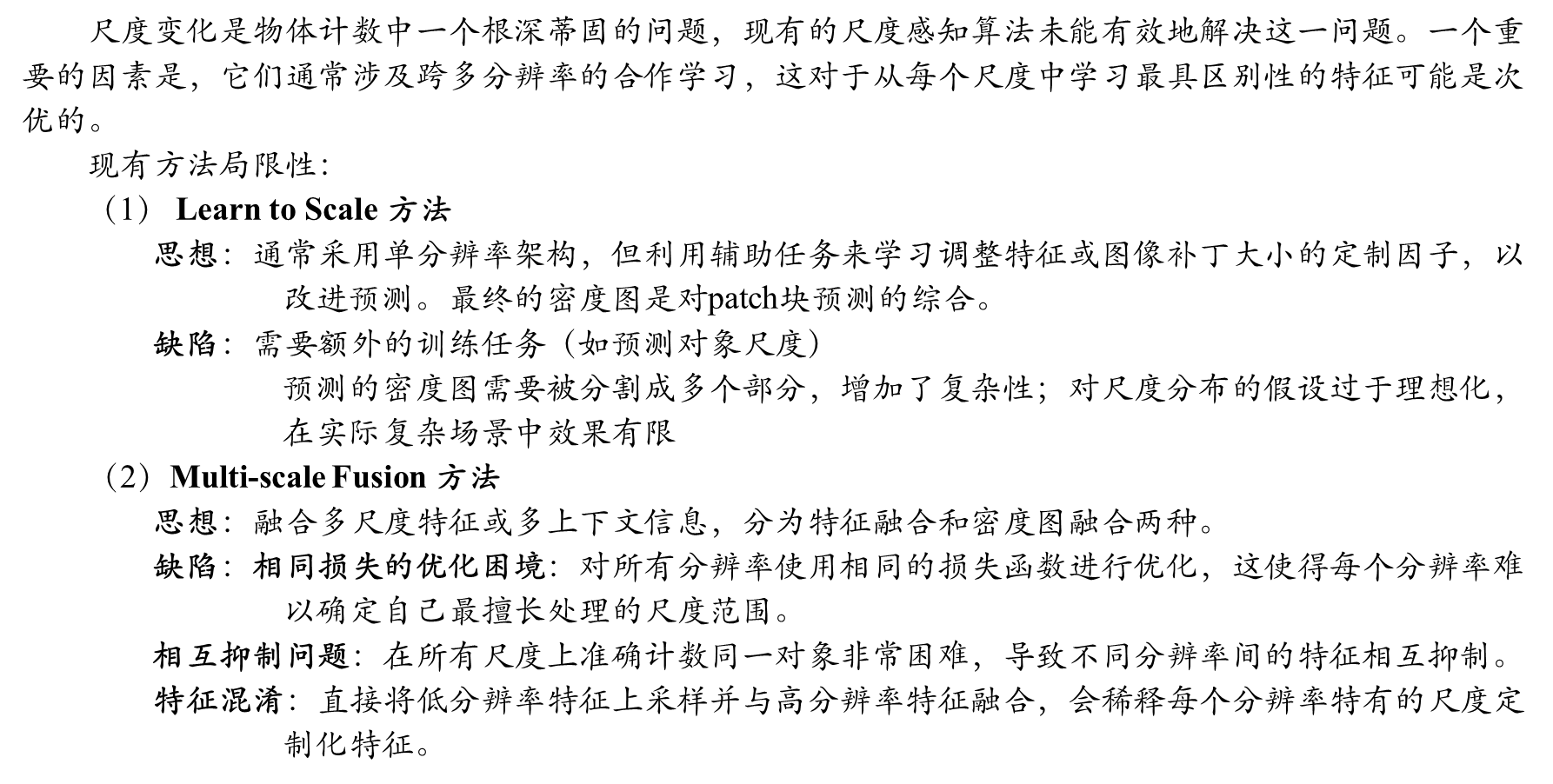
多尺度的研究现状
提出的方法
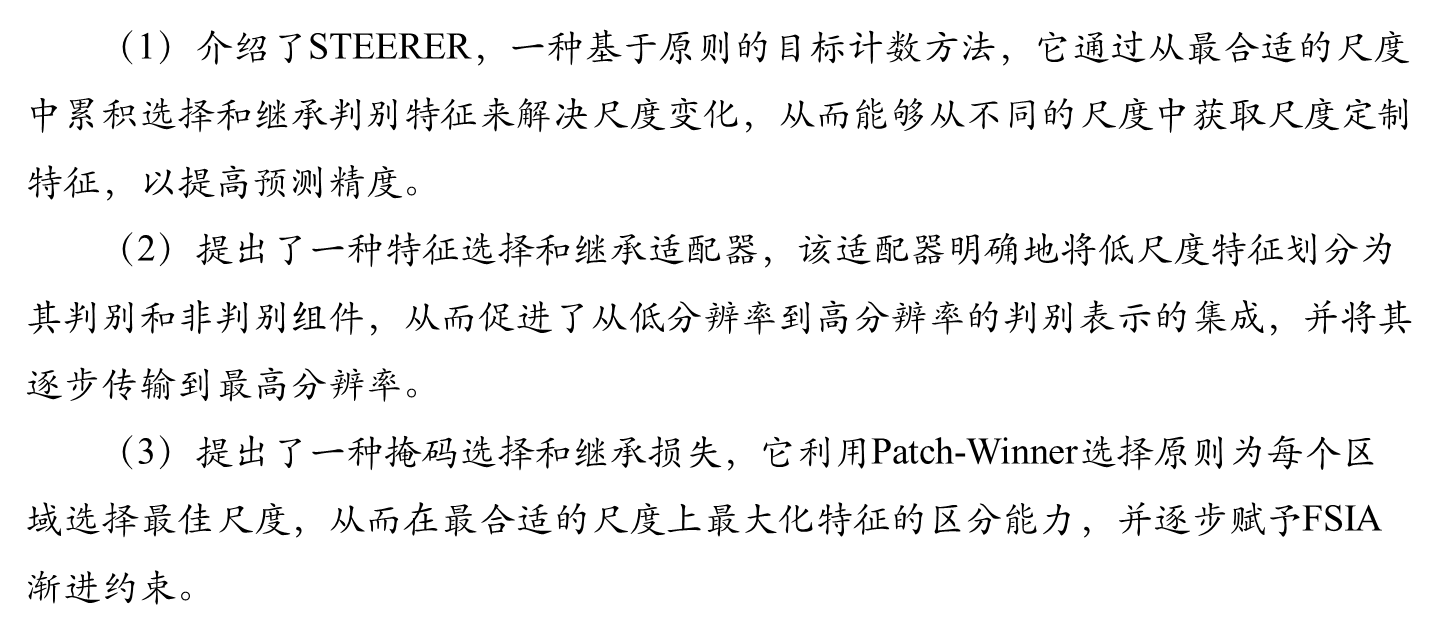
整体模型架构
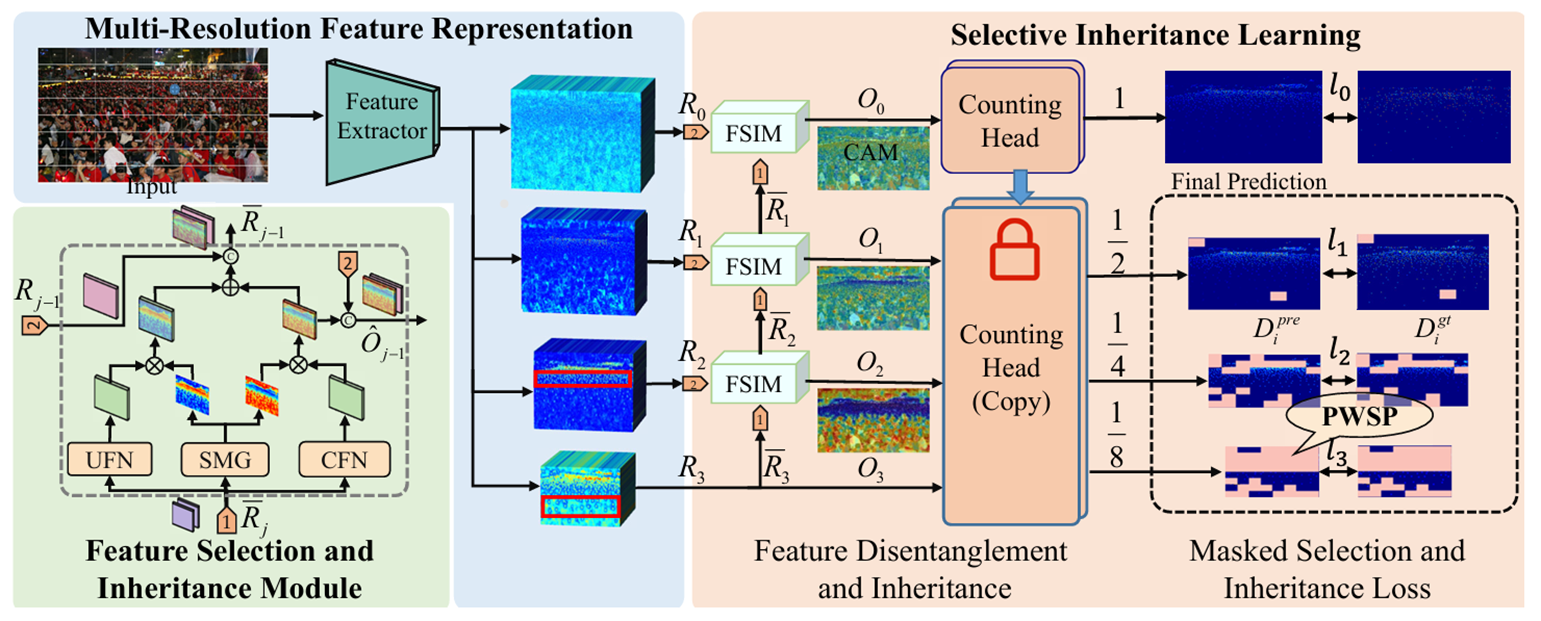
如图2所示:在选择性继承学习的监督下,采用FSIA将多尺度特征从最低分辨率融合到最高分辨率。使用CAM方法来显示了每个尺度上的熟练区域。Inference只使用最高分辨率的预测图。密度图中的掩蔽斑块表示它们在损失计算过程中被忽略。
多尺度特征表示

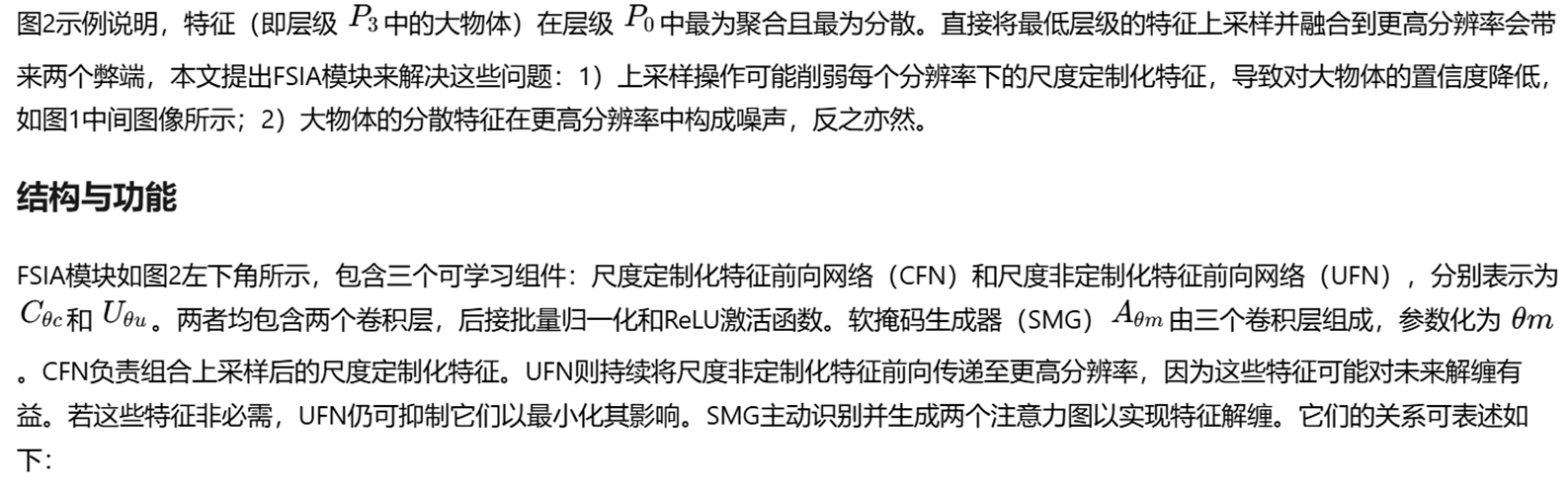
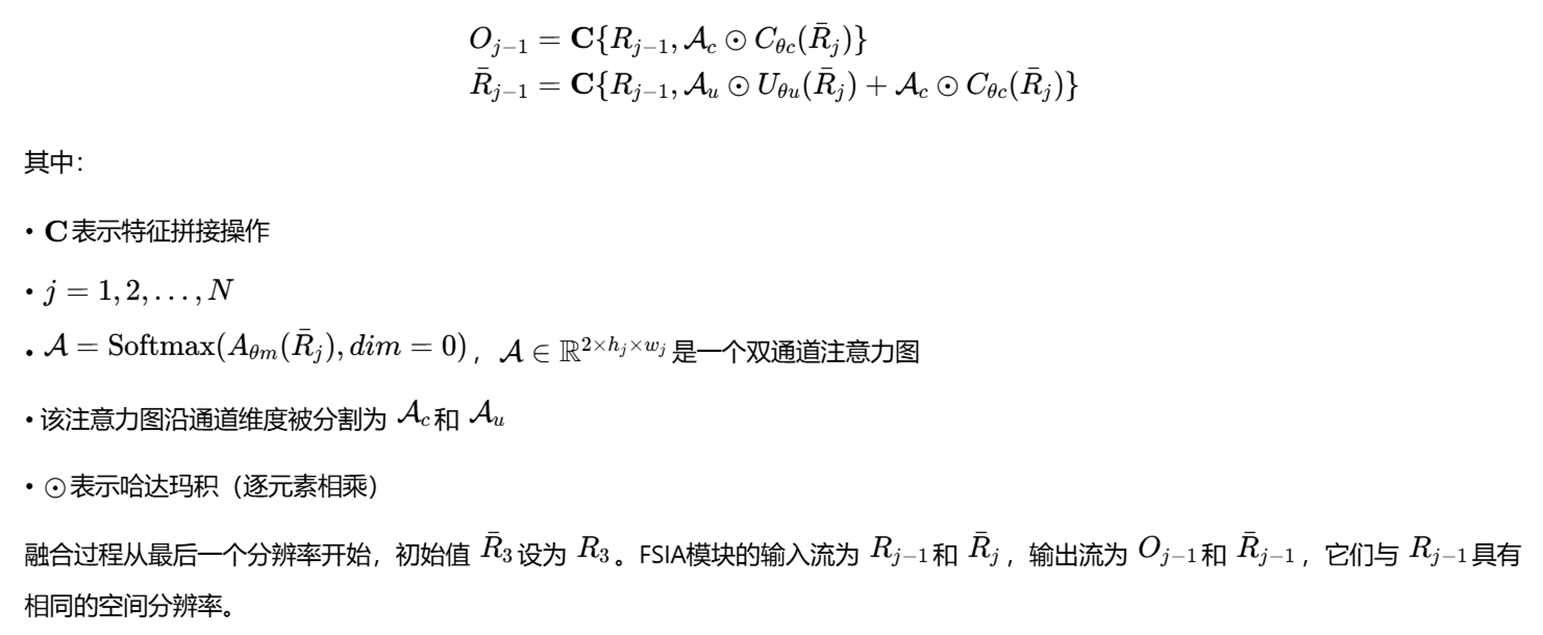
特征选择和继承自适应器
(上面结构图的左下角图)
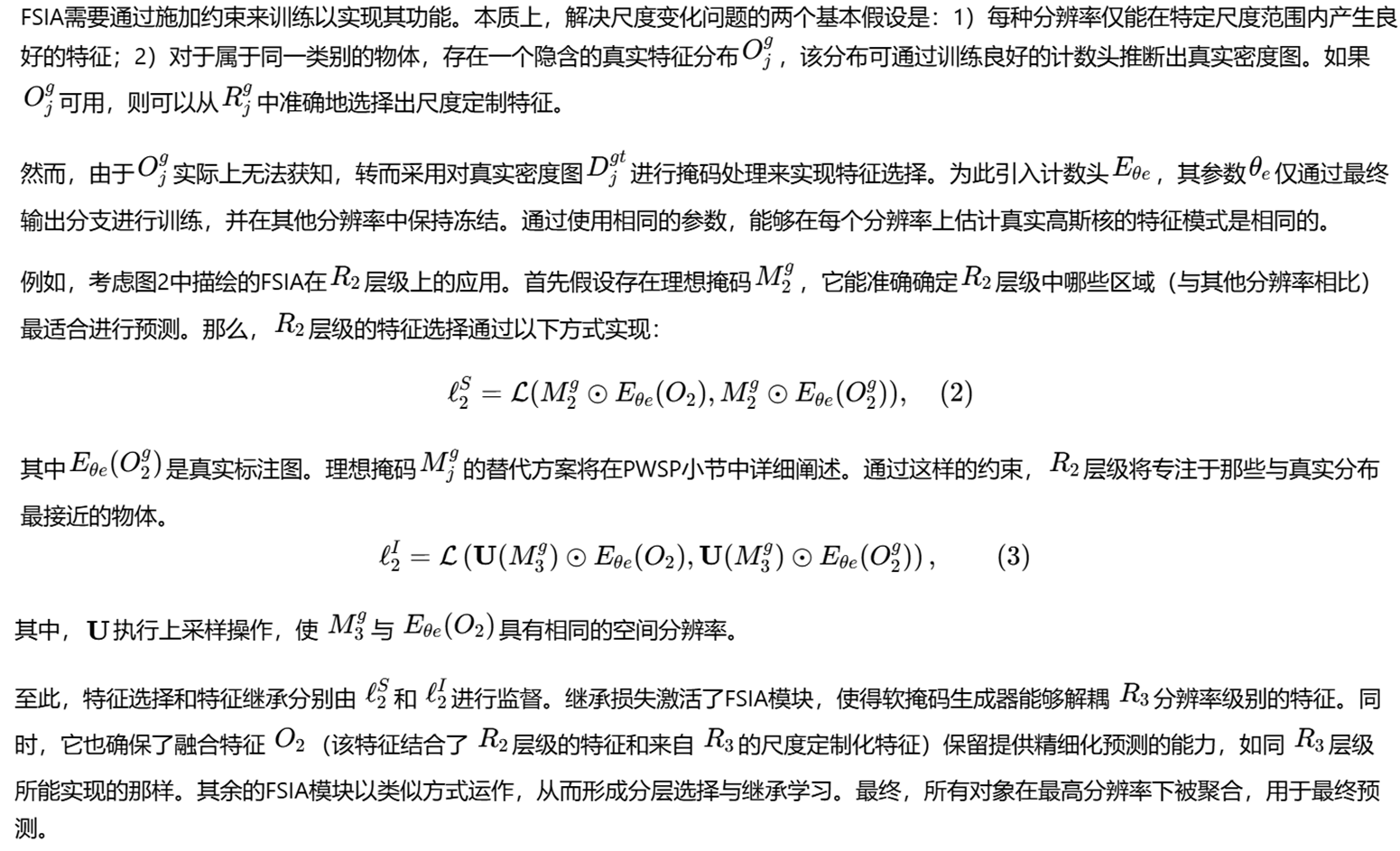
掩码选择和继承损失
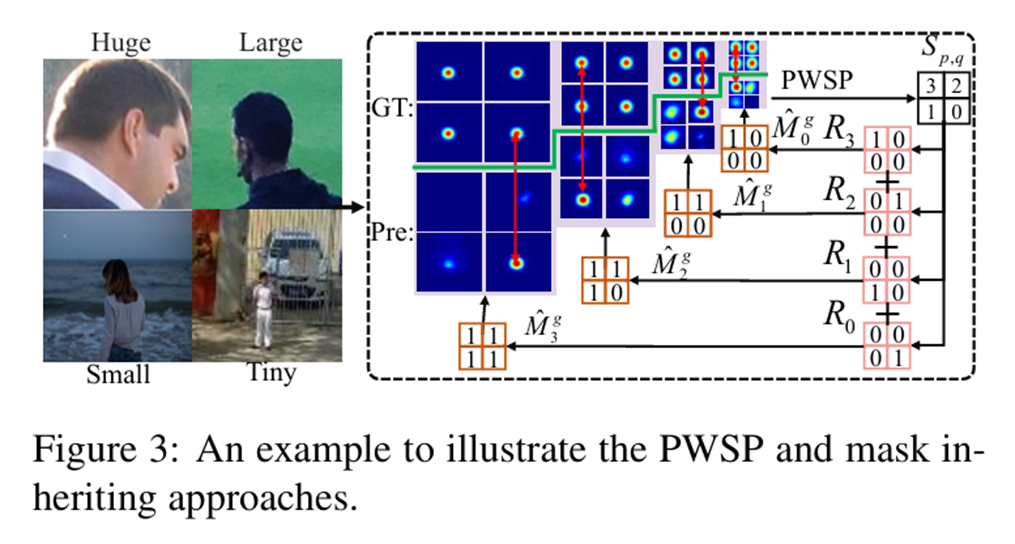
Patch-Winner 选择方法
综合实验
数据比较
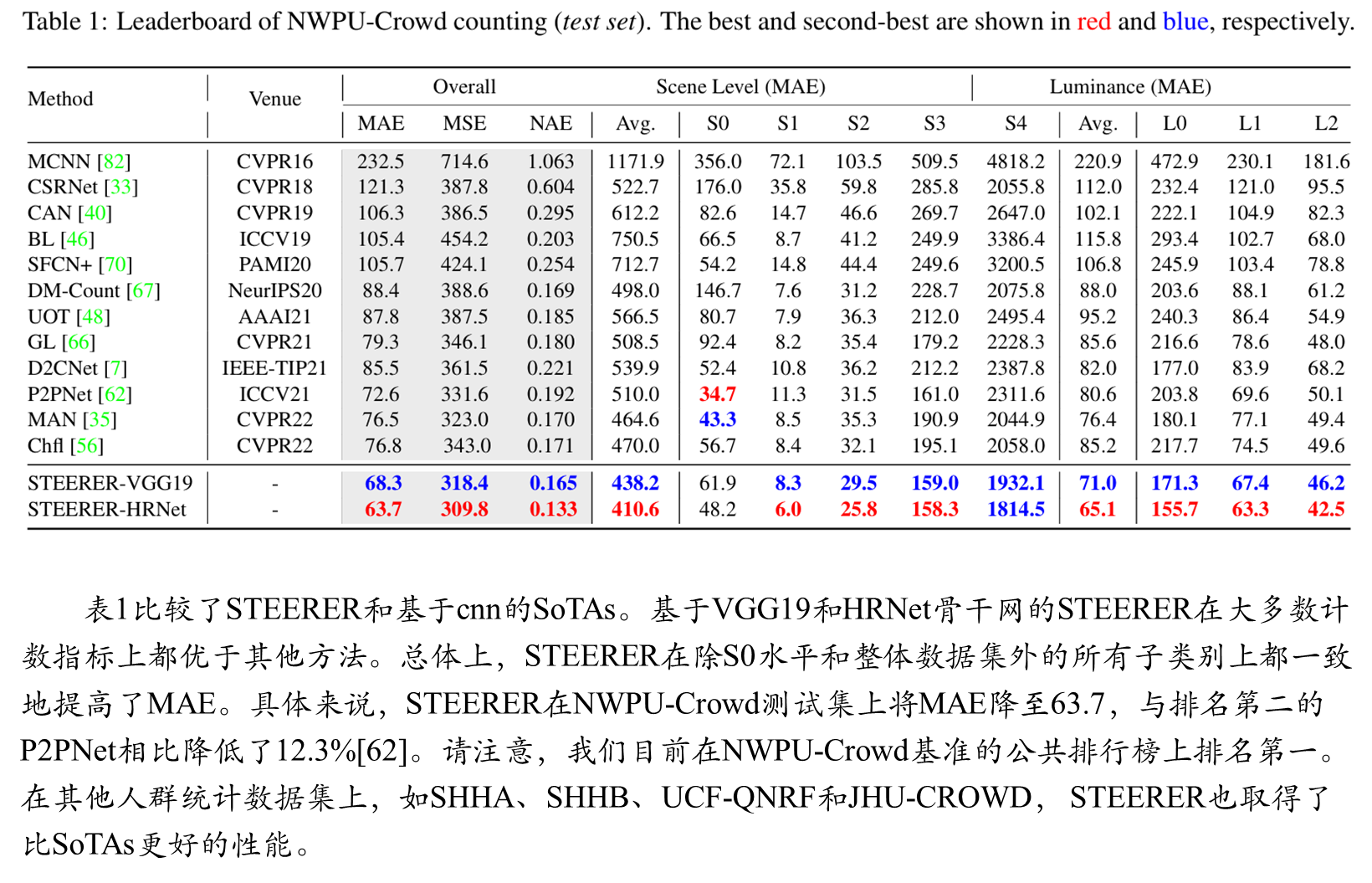
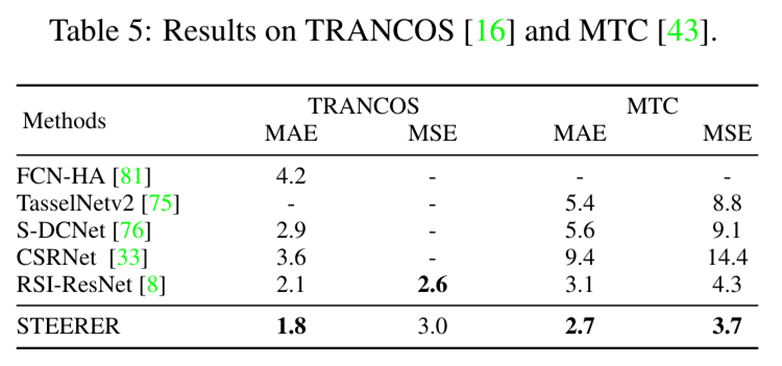
表5显示,直接应用STEERER评估车辆(TRANCOS)和玉米计数(MTC)时效果良好。对于车辆计数,我们进一步降低估计MAE。对于植物计数,我们的模型优于其他SoTAs,它们的MAE和MSE分别下降了12.9%和14.0%,显示出显著的改进。
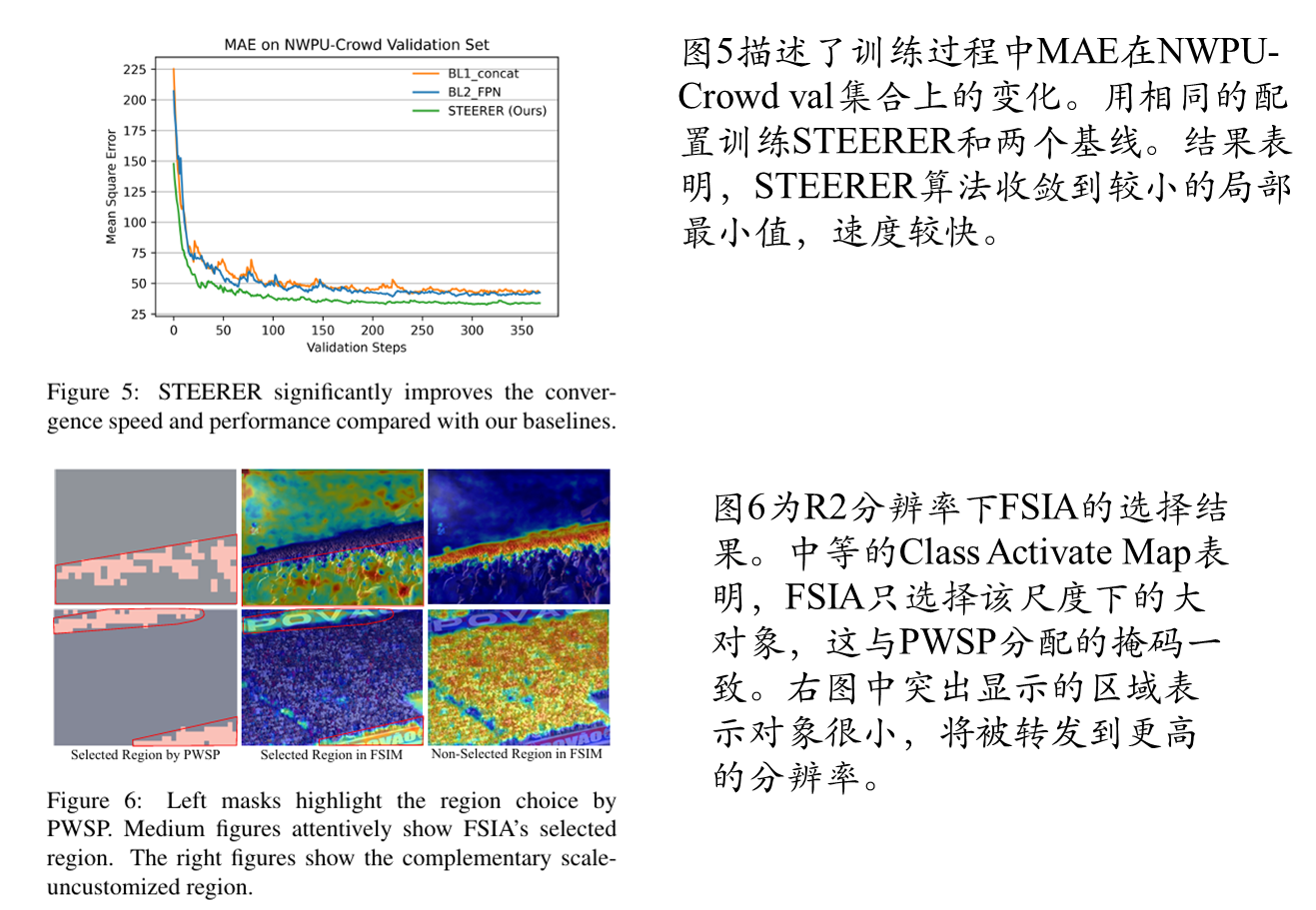
可视化结果说明
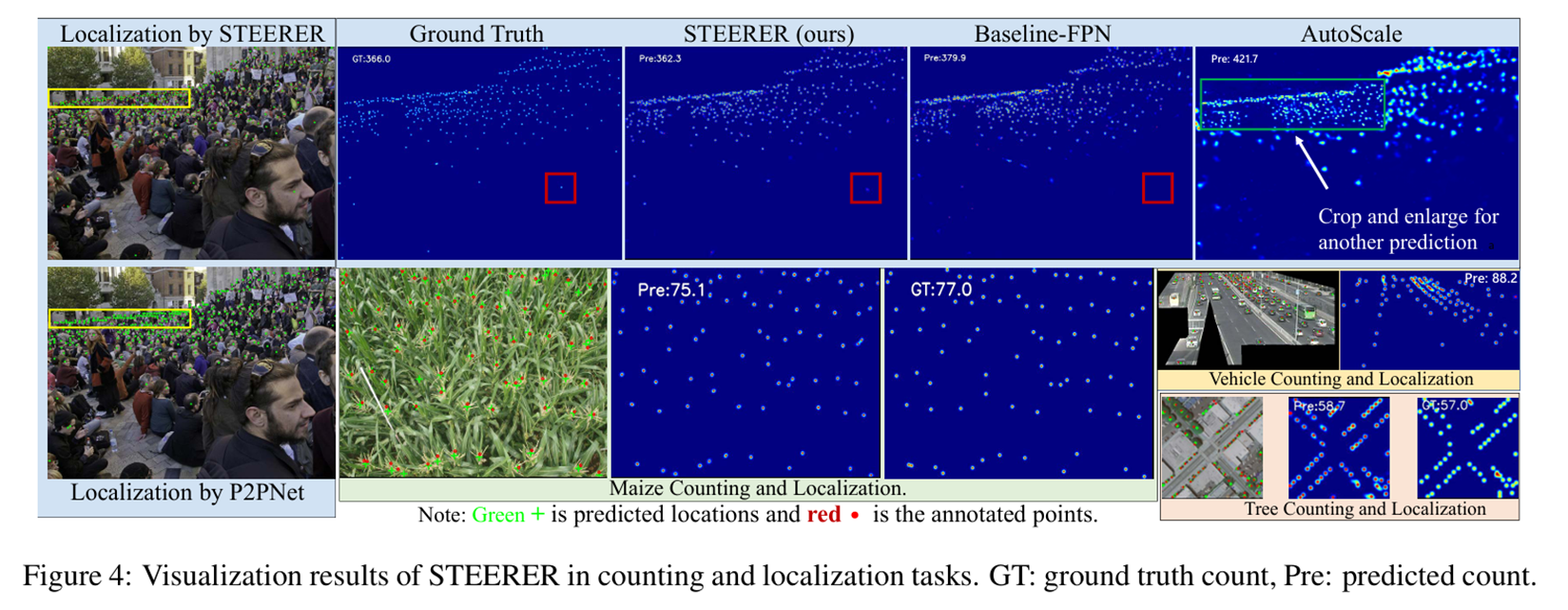
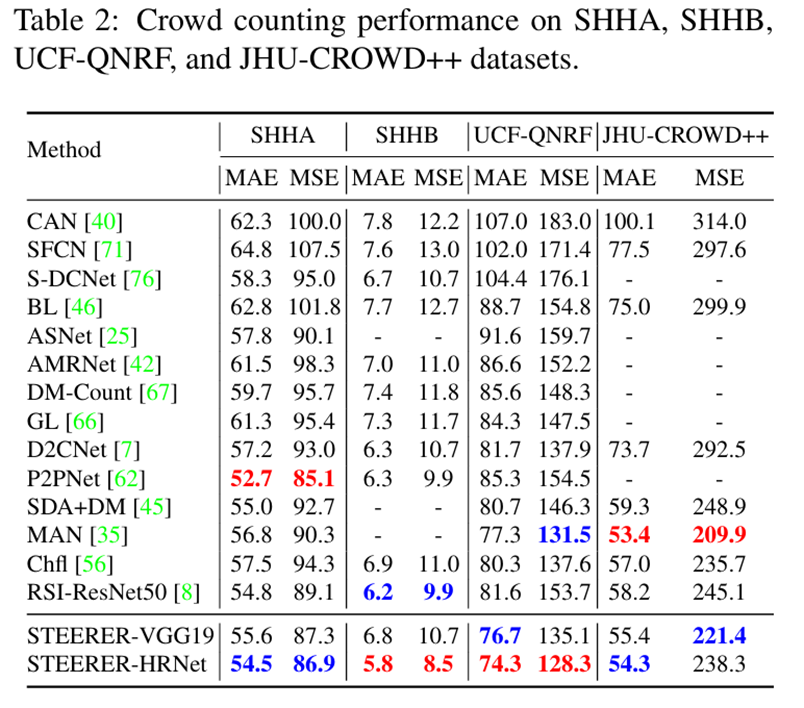
图4展示了实际场景下密度图的质量和定位结果。在人群场景中,与AutoScale相比,STEERER和基线模型在生成密度图方面都表现出更高的精度。在物体定位方面,与基线和P2PNet相比,STEERER在检测大型物体方面表现出更强的泛化能力,如图4中的红框部分所示。此外,STEERER在识别小而密集的物体方面保持了其有效性(见图4黄框部分)。所提出的STEERER模型具有跨不同领域的可移植性,例如车辆、树和玉米的定位和计数。
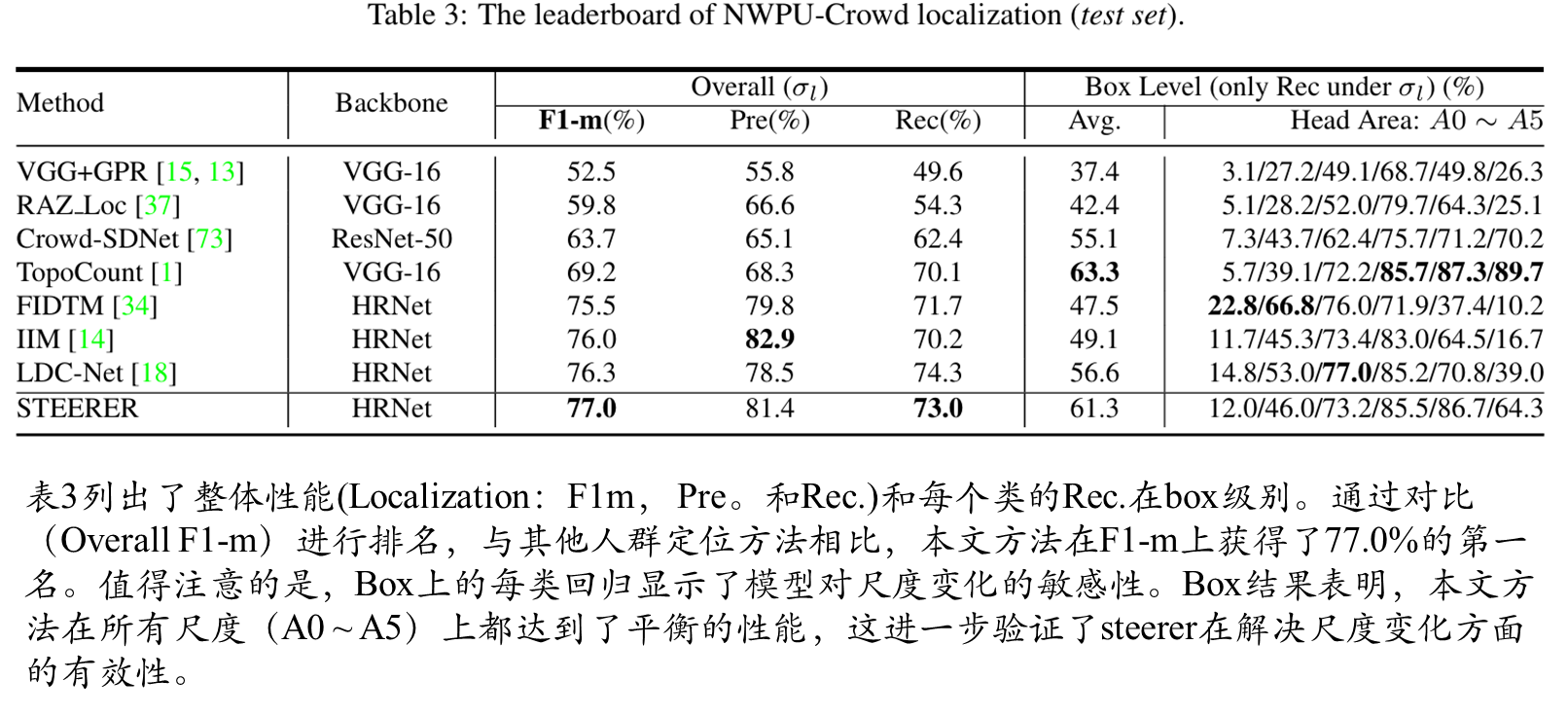
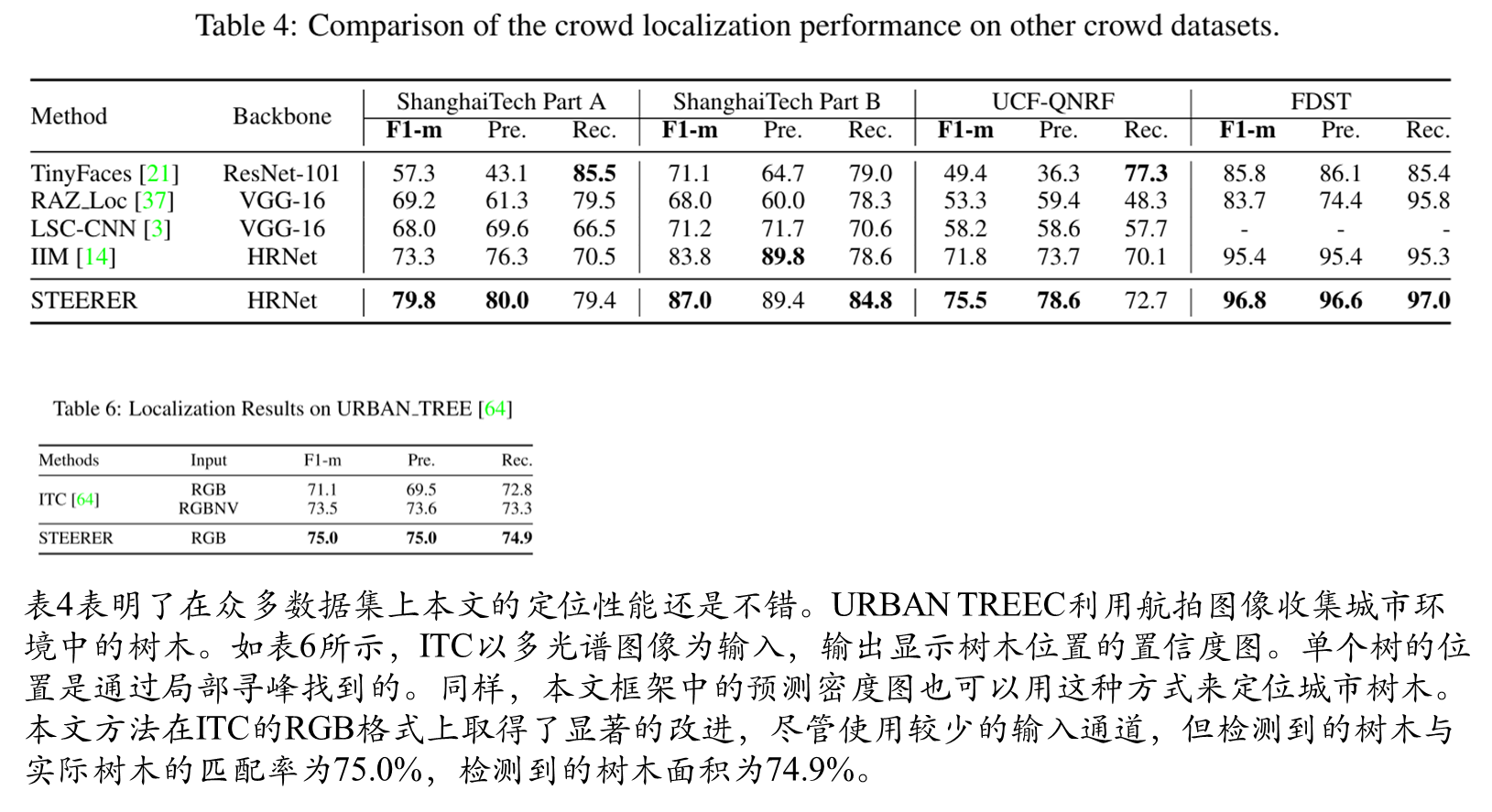
定位性能对比
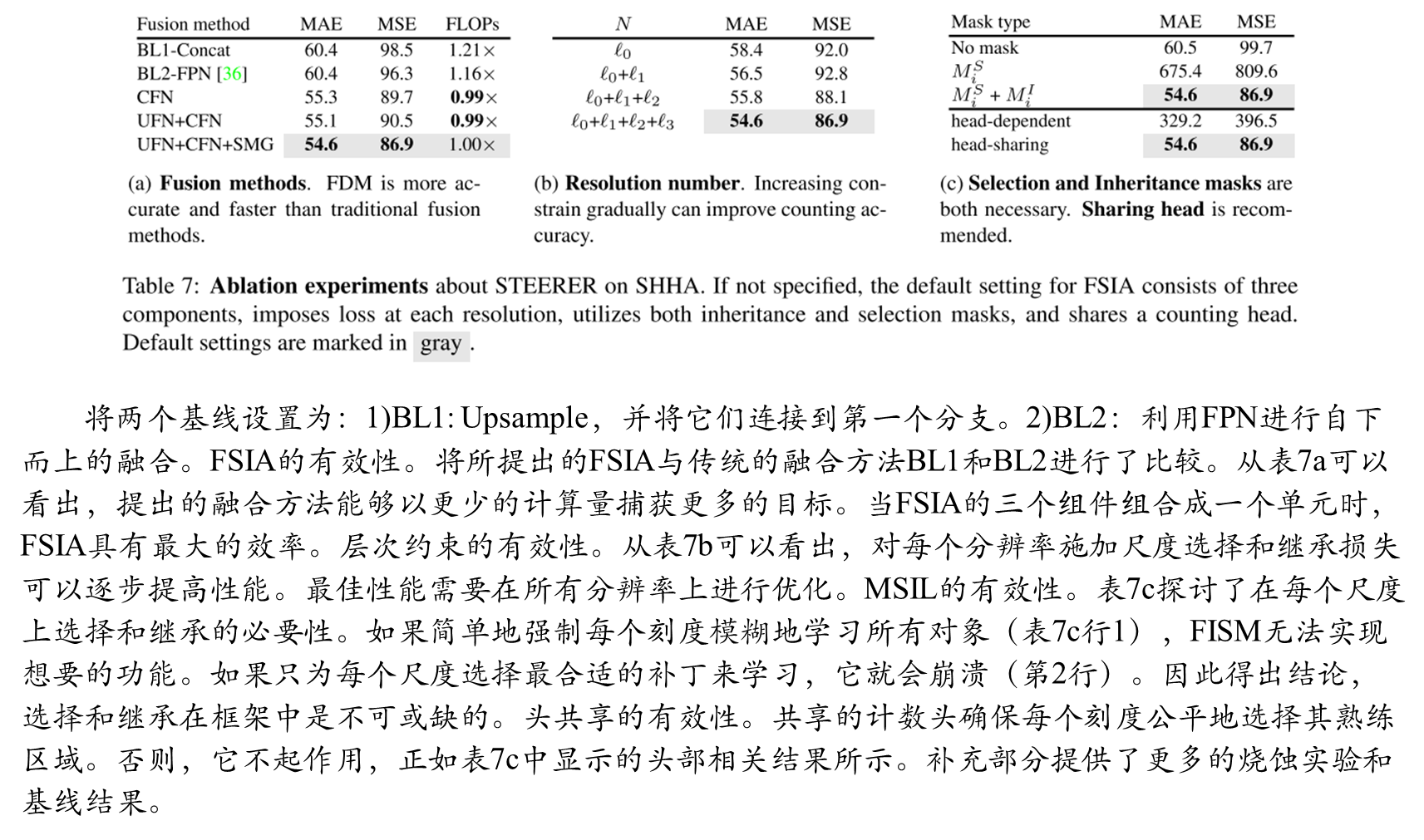
消融实验研究
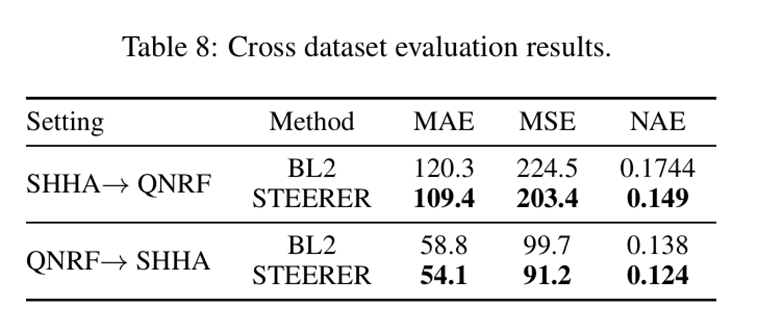
跨域测试