往期精彩内容:
Python轴承故障诊断 (14)高创新故障识别模型-CSDN博客
独家原创 | SCI 1区 高创新轴承故障诊断模型!-CSDN博客
基于 GADF+Swin-CNN-GAM 的高创新轴承故障诊断模型-CSDN博客
Python轴承故障诊断 (19)基于Transformer-BiLSTM的创新诊断模型-CSDN博客
Python轴承故障诊断 (20)高创新故障识别模型(三)-CSDN博客
视觉顶会论文 | 基于Swin Transformer的轴承故障诊断-CSDN博客
Python轴承故障诊断 | 多尺度特征交叉注意力融合模型-CSDN博客
SHAP 模型可视化 + 参数搜索策略在轴承故障诊断中的应用-CSDN博客
速发论文 | 基于 2D-SWinTransformer+1D-CNN-SENet并行故障诊断模型-CSDN博客
Python轴承故障诊断 (21)基于VMD-CNN-BiTCN的创新诊断模型-CSDN博客
基于改进1D-VGG模型的轴承故障诊断和t-SNE可视化-CSDN博客
故障诊断 | 创新模型更新:基于SSA-CNN-Transformer诊断模型-CSDN博客
独家首发 | 基于 2D-SwinTransformer + BiGRU-GlobalAttention的并行故障诊断模型-CSDN博客
位置编码祛魅 | 详解Transformer中位置编码Positional Encoding-CSDN博客
创新点 | 基于快速傅里叶卷积(FFC) 的故障诊断模型-CSDN博客
代码开源! | 变工况下的域对抗图卷积网络故障诊断-CSDN博客
超强 !顶会创新融合!基于 2D-SWinTransformer 的并行分类网络-CSDN博客
多模态-故障诊断 | 大核卷积开启视觉新纪元!-CSDN博客
超强!一区直接写!基于SSA+Informer-SENet故障诊断模型-CSDN博客
Transformer结构优势 ,How Much Attention Do You Need?-CSDN博客
故障诊断 | 一个小创新:特征提取+KAN分类-CSDN博客
图卷积故障诊断,新增GAT、SGCN、GIN分类模型-CSDN博客
故障诊断一区直接写,图卷积+BiGRU-Attention 并行诊断模型-CSDN博客
故障诊断高创新!基于1D-GRU+2D-MTF-ResNet-CBAM的多模态融合分类模型_基于1dcnn-informer+matt融合的故障诊断模型-CSDN博客
创新首发! | 基于1DCNN-Informer+MATT融合的故障诊断模型_论文复现基于 1dcnn bilstm 的航空发动机故障分类研究-CSDN博客
轴承故障特征---SHAP 模型 3D 可视化_shap值溯源模型-CSDN博客
时频图像/多模态+顶会论文创新,故障诊断发文不是梦!-CSDN博客
江南大学轴承故障诊断教程+1DVGG-6种注意力机制合集!-CSDN博客
轴承寿命预测全家桶更新!新增西交XJTU-SY数据集+预测模型合集_hxd3b 型电力机车轴承寿命预测实例中,一张该模型预测结果-CSDN博客
最强更新!西储大学(CWRU)轴承数据集保姆级教程!-CSDN博客
故障诊断 SCI 1 区直接写!基于GADF+SwinTransformer-CBAM+GRU的多模态融合分类模型-CSDN博客
故障诊断模型评估------混淆矩阵,如何使样本量一致(上)-CSDN博客
前言
本期基于东南大学齿轮箱故障数据集,提出一种结合马尔科夫转移场(Markov Transition Field, MTF)与融合SwinTransformer和Informer的多模态故障诊断创新模型。创新性地解决了齿轮箱故障信号诊断中的信息表达与特征挖掘难题,实现了高效、准确且鲁棒的故障诊断性能。此方法为机械故障诊断领域提供了一条全新的多模态融合思路,拓展了深度学习在工业智能维护中的应用边界。
● 数据集:东南大学齿轮箱故障数据集
● 环境框架:python 3.11 pytorch 2.1 及其以上版本均可运行
● 准确率:测试集99%
● 使用对象:初学者、论文需求、毕业设计需求者
● 代码保证:代码注释详细、即拿即可跑通。
1 多模态创新模型简介
1.1 模型简介
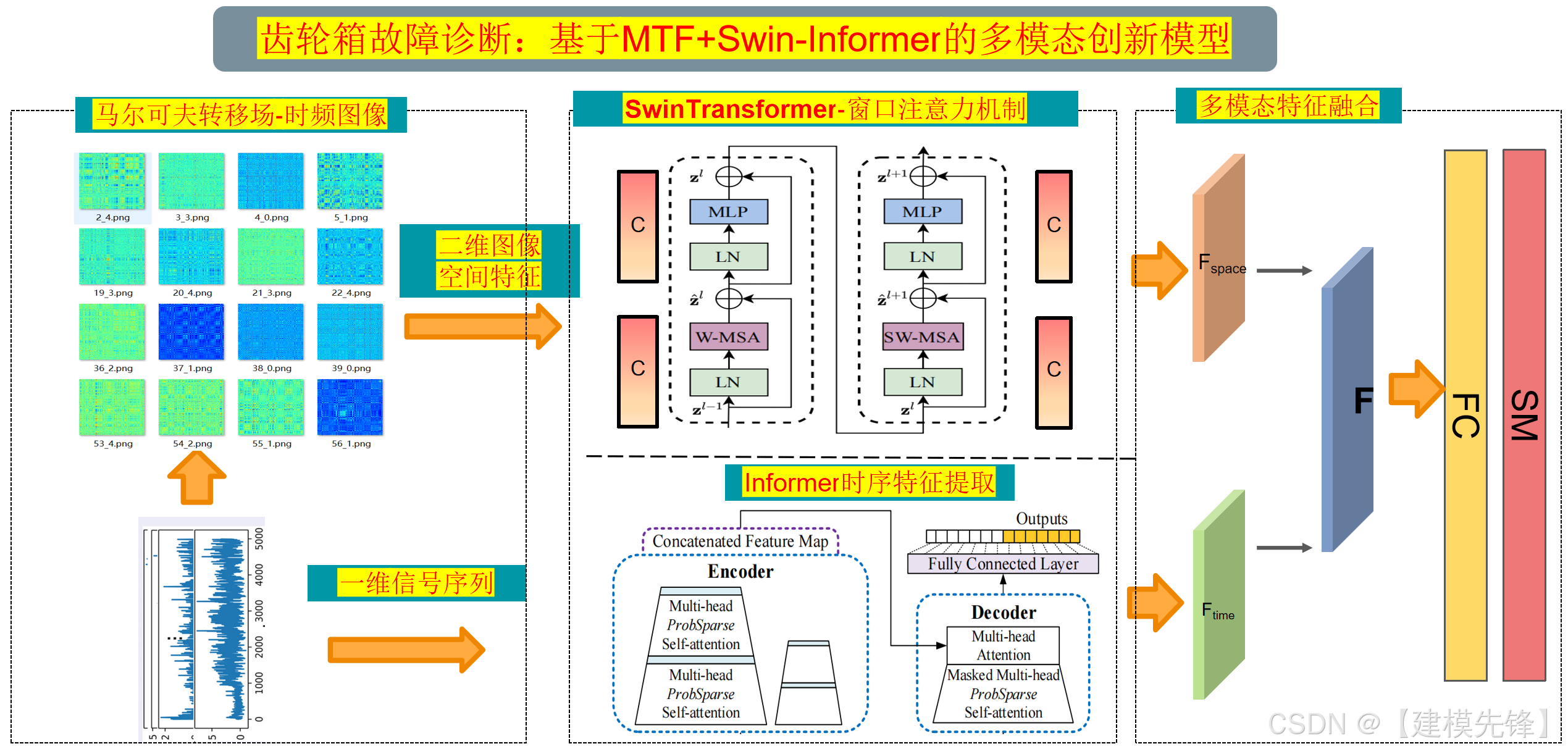
模型首先利用MTF将一维故障信号序列转换为时频图像,捕捉信号的时间序列映射的概率转移特征。然后,采用Swin Transformer的层次化窗口注意力机制对时频图像进行高效的空间特征提取,以增强对时频结构的理解。同时,一维原始故障信号序列输入Informer模型以学习其长序列的时间依赖特征。最后,通过特征融合机制将时频图像的空间信息与一维信号的时域信息有效整合,实现对齿轮箱故障类别的精准分类。实验结果表明,该多模态融合模型在准确率和鲁棒性上均优于传统单模态方法,展现了极佳的故障识别性能和应用潜力。
1.2 模型细节与创新点
多模态数据表达
(1)MTF时频图像转换
采用马尔科夫转移场(MTF)方法将一维振动信号序列映射为二维时频图像,利用信号幅值的状态转移概率构建图像,从而在图像空间中表达信号的动态时间依赖特征。相比传统频谱方法,MTF更好地保留了时序信息,有助于后续深度模型的学习。
(2)时域原始信号序列
并行保留原始一维振动信号,用于捕捉低维且直接的时间序列信息,避免单纯图像转换可能导致的信息丢失。
特征提取网络结构
(1)Swin Transformer提取空间特征
Swin Transformer通过引入层次化的滑动窗口多头自注意力机制(Window-based Multi-Head Self-Attention),高效学习MTF转换的时频图像的局部及全局空间依赖关系,解决传统卷积网络的感受野限制和全局依赖建模不足问题,提升时频特征表达的准确性和泛化能力。
(2)Informer模型提取时域长序列特征
Informer利用稀疏自注意力机制及高效的长序列依赖捕获能力,针对一维故障信号的时间序列特性进行建模,特别适合故障信号的长时依赖关系挖掘,增强了时间动态变化的特征捕获效果。
多模态特征融合策
将Swin Transformer提取的空间特征与Informer的时域特征有效结合。融合策略充分利用两大模态互补的信息,形成丰富且具判别力的特征表示,显著提升故障诊断的准确性和稳定性。
优势与创新
(1)创新性多模态融合框架,首次将MTF+Swin Transformer结合Informer架构应用于齿轮箱故障诊断,充分利用时频空间信息与时域长序列信息的互补优势。
(2)引入窗口注意力机制的Swin Transformer,使得时频图像的空间特征提取更高效且具层次性,突破了传统CNN和普通Transformer在特征提取上的瓶颈。
(3)基于Informer的长时序建模能力,更精准捕捉振动信号中的周期性和趋势变化,对于故障演进过程的识别尤为有效。
(4)综合实验验证,该模型在东南大学齿轮箱数据集上的故障识别表现优异,明显优于单一模态及传统深度学习方法,具有较强的实际工程应用价值。
2 东南大学数据集预处理
2.1 导入数据
东南大学齿轮箱数据集数据集包括轴承和齿轮两个子数据集,且都是从传动系统动力学模拟器收集的。齿轮故障数据集共设有两种工况 ,分别是20Hz-0(转 速-负 载)和30Hz-2V。齿轮故障数据共收集了5种齿轮运行状态信号,分别是健康、剥落 、断齿、裂纹和磨损:
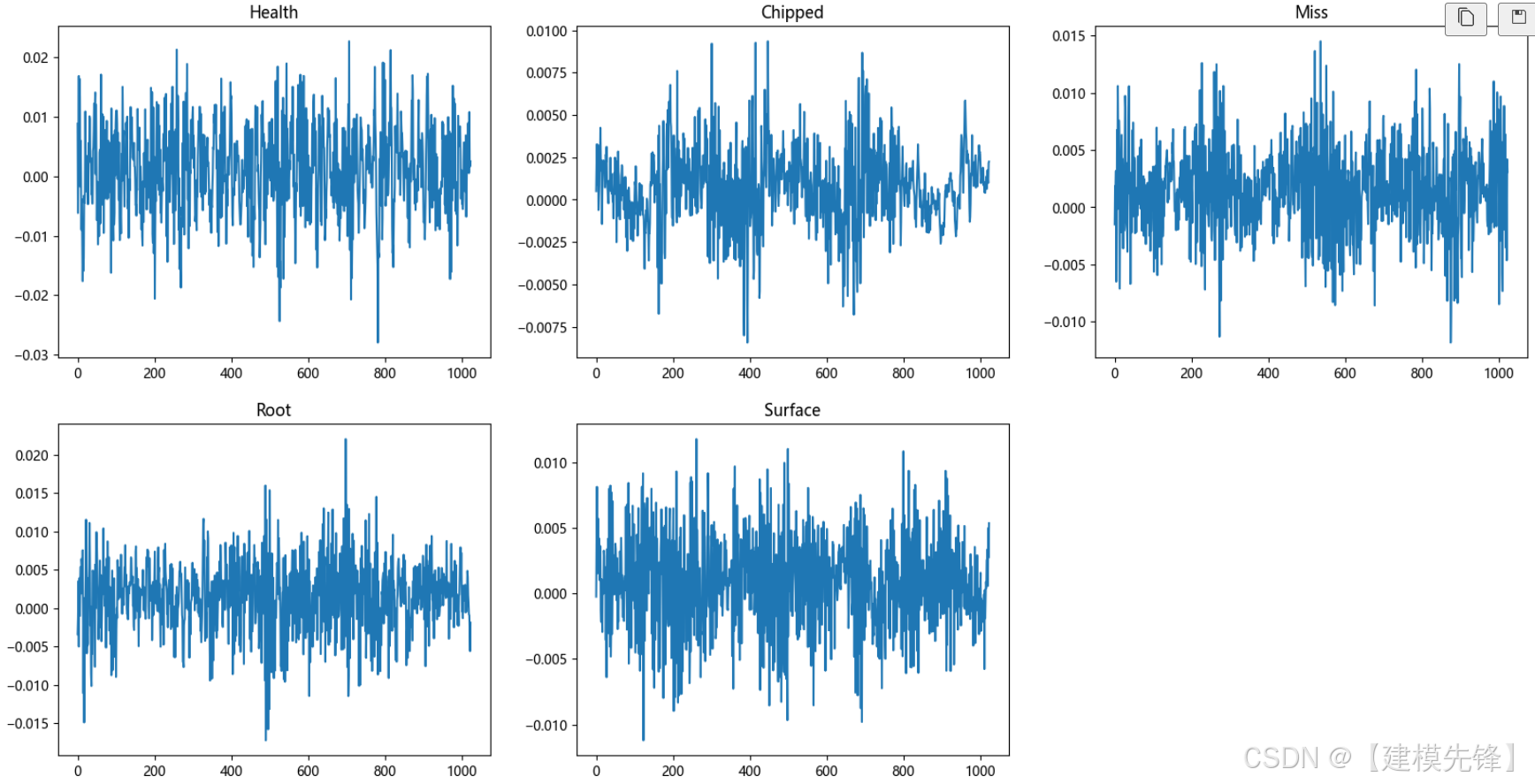
2.2 数据集预处理
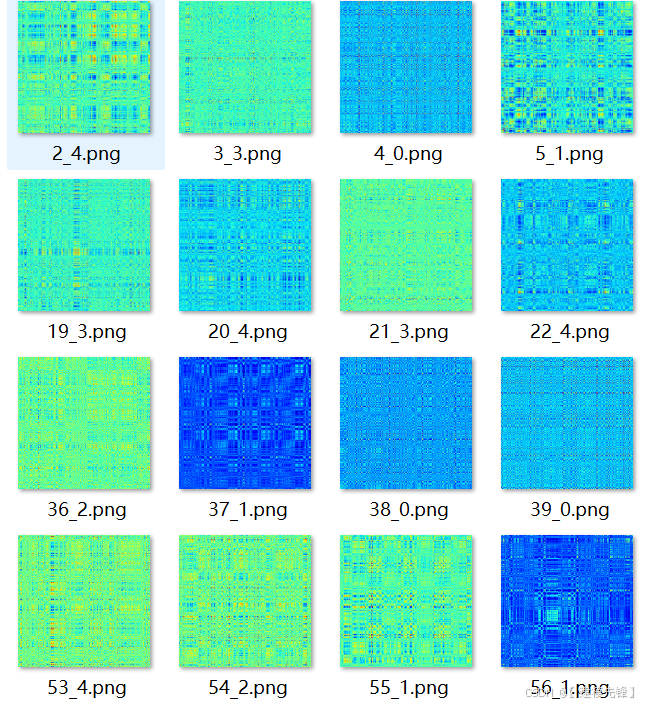
通过滑动窗口制作数据集,并按照7:2:1均匀划分训练集、验证集、测试集,最后保存数据。本文采用马尔可夫转换场 MTF来作为时频图像变换的处理方法,生成的时频图像如下所示:
3 基于MTF+Swin-Informer的故障诊断模型
3.1 定义网络模型,设置参数,训练模型
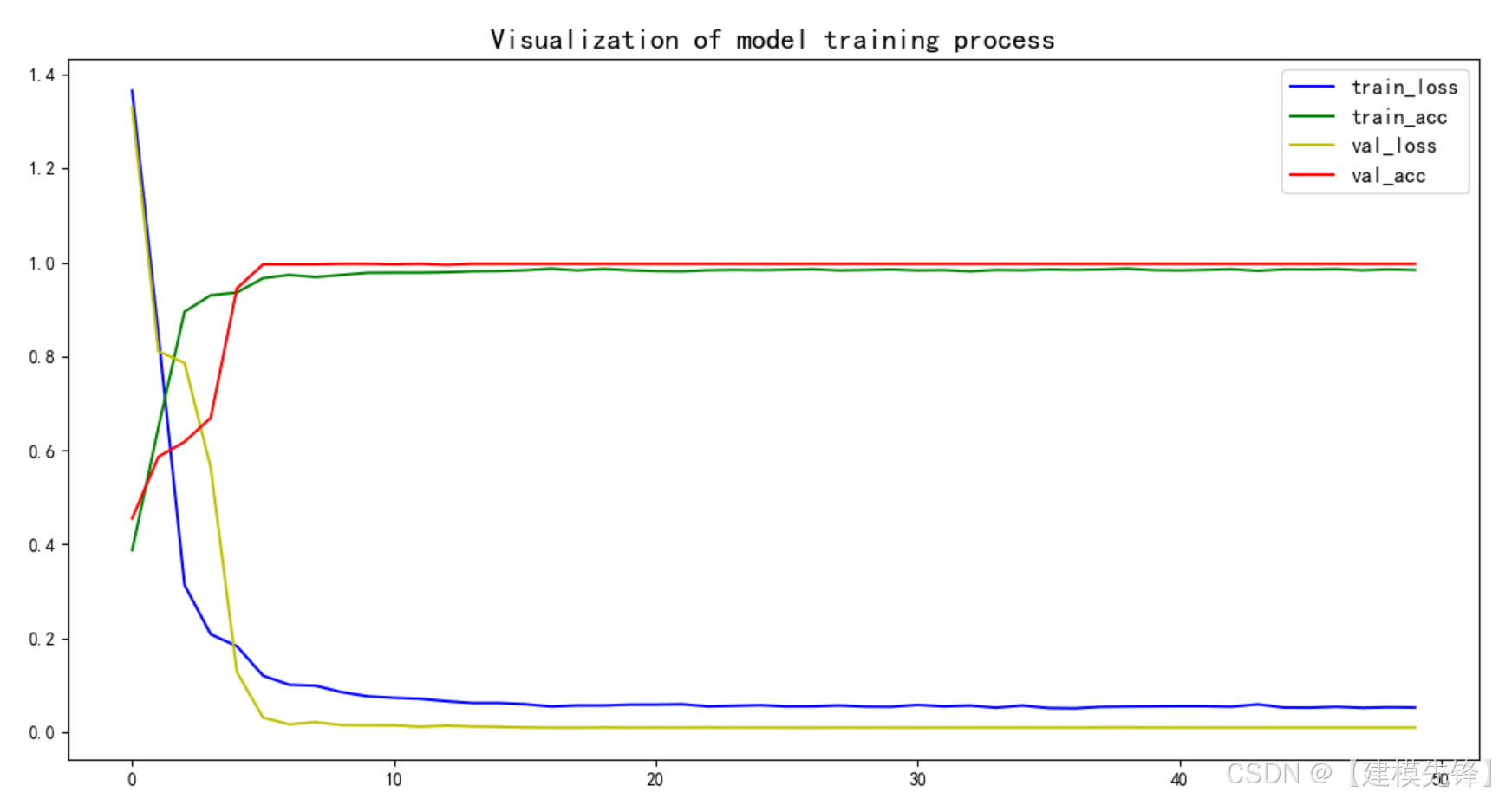
50个epoch,准确率99%,用MTF+Swin-Informer 网络分类效果显著,能够从故障信号特征中提取出对模型识别重要的特征,效果明显!应用展现出显著优势:
(1)跨模态协同融合:区别于传统故障诊断依赖单一数据表达,本文模型通过MTF转换把时序信号空间化,再结合时域原始信号,保证关键特征不丢失且多角度感知,信息利用率充分。
(2)引入新型Transformer架构:Swin Transformer与Informer均为Transformer家族的高效变体,适应不同维度数据的长距离依赖建模,体现深度学习最新技术优势。
(3)适用工业实践的高效性:滑动窗口注意力与稀疏注意力显著降低模型复杂度,兼顾性能与计算需求,利于实际工业环境的部署和应用。
3.2 模型评估
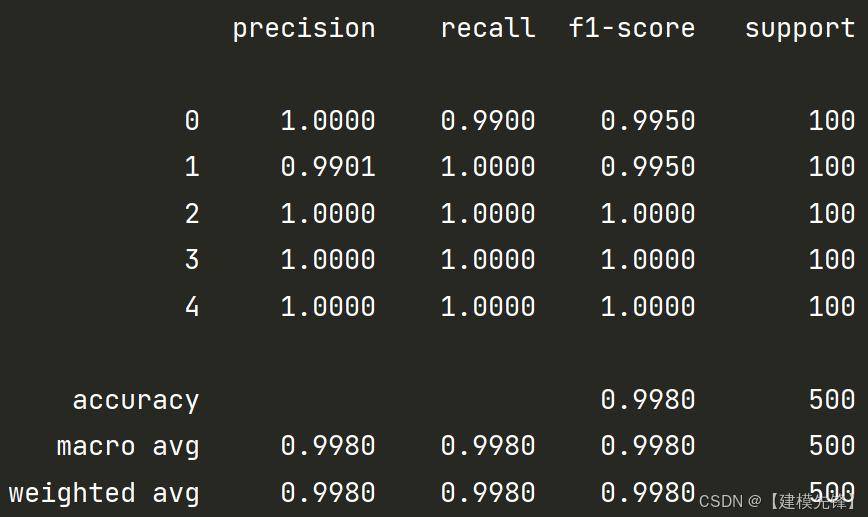
(1)准确率、精确率、召回率、F1 Score
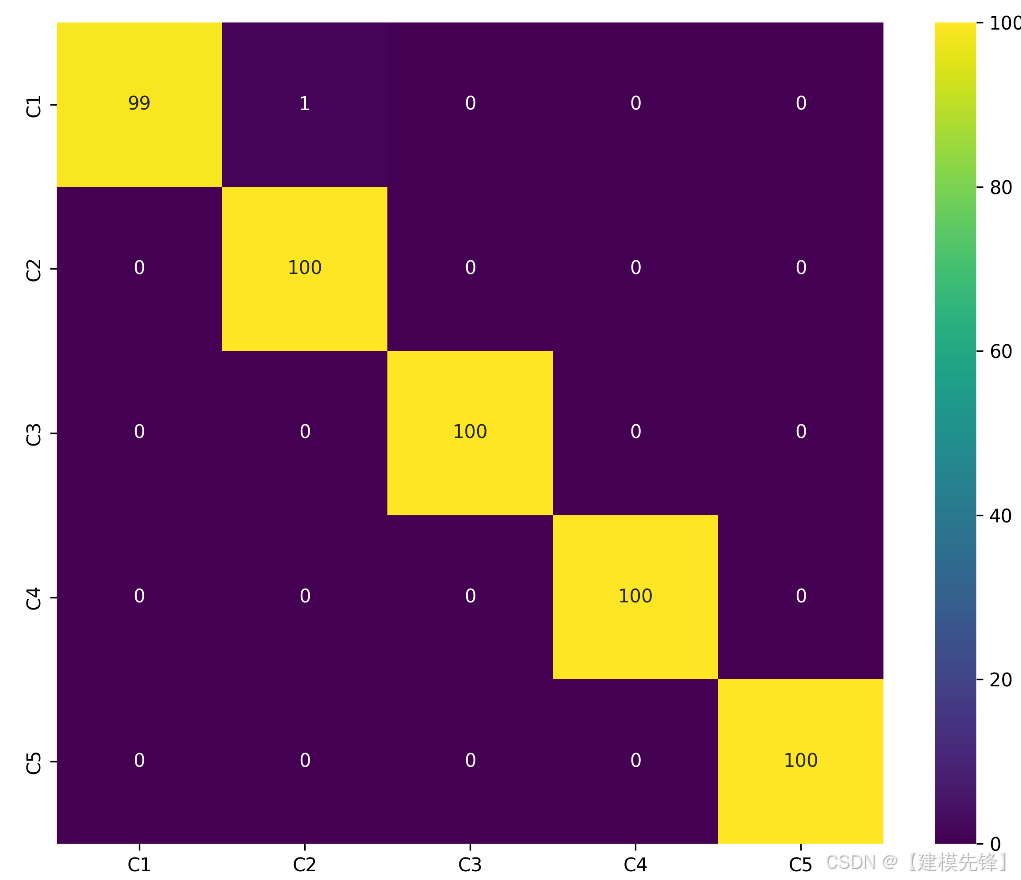
(2)故障5分类混淆矩阵:
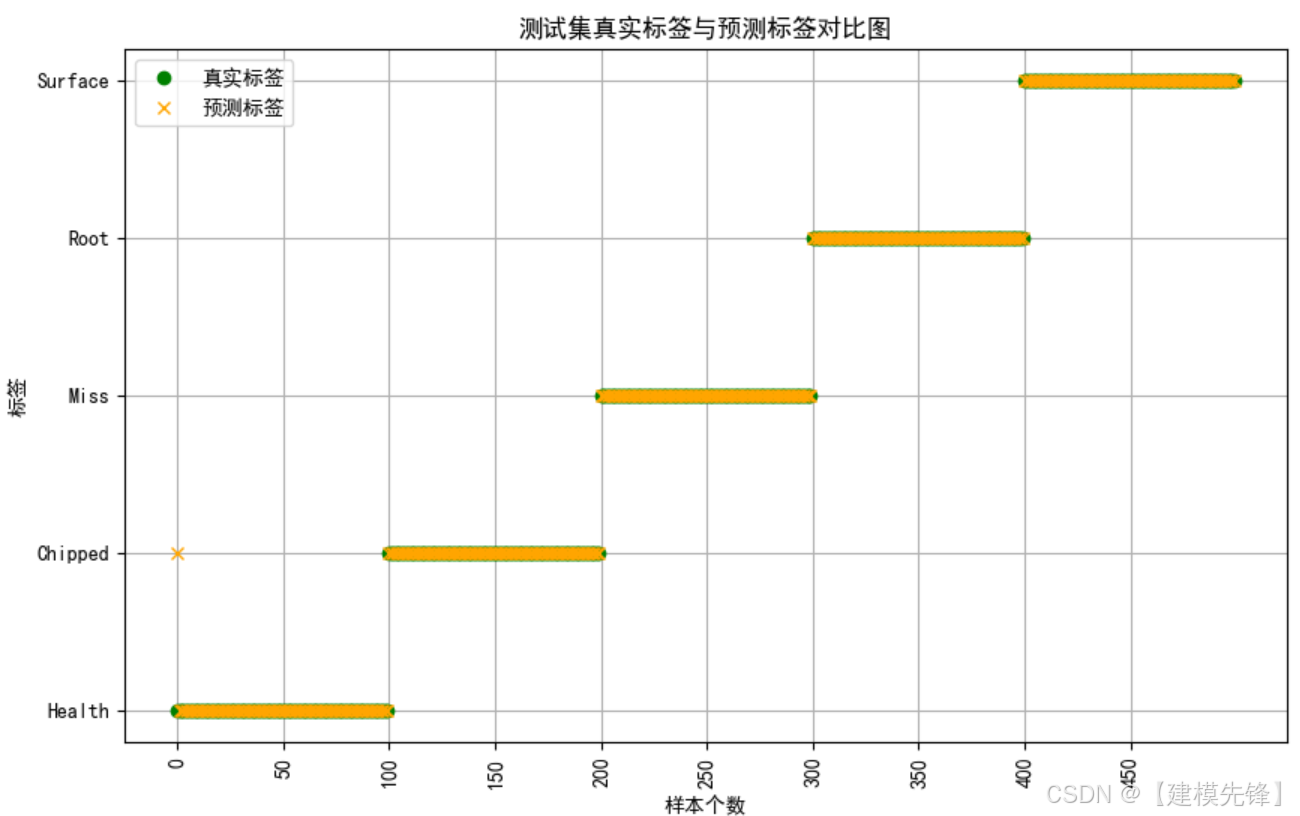
(3)分类标签可视化
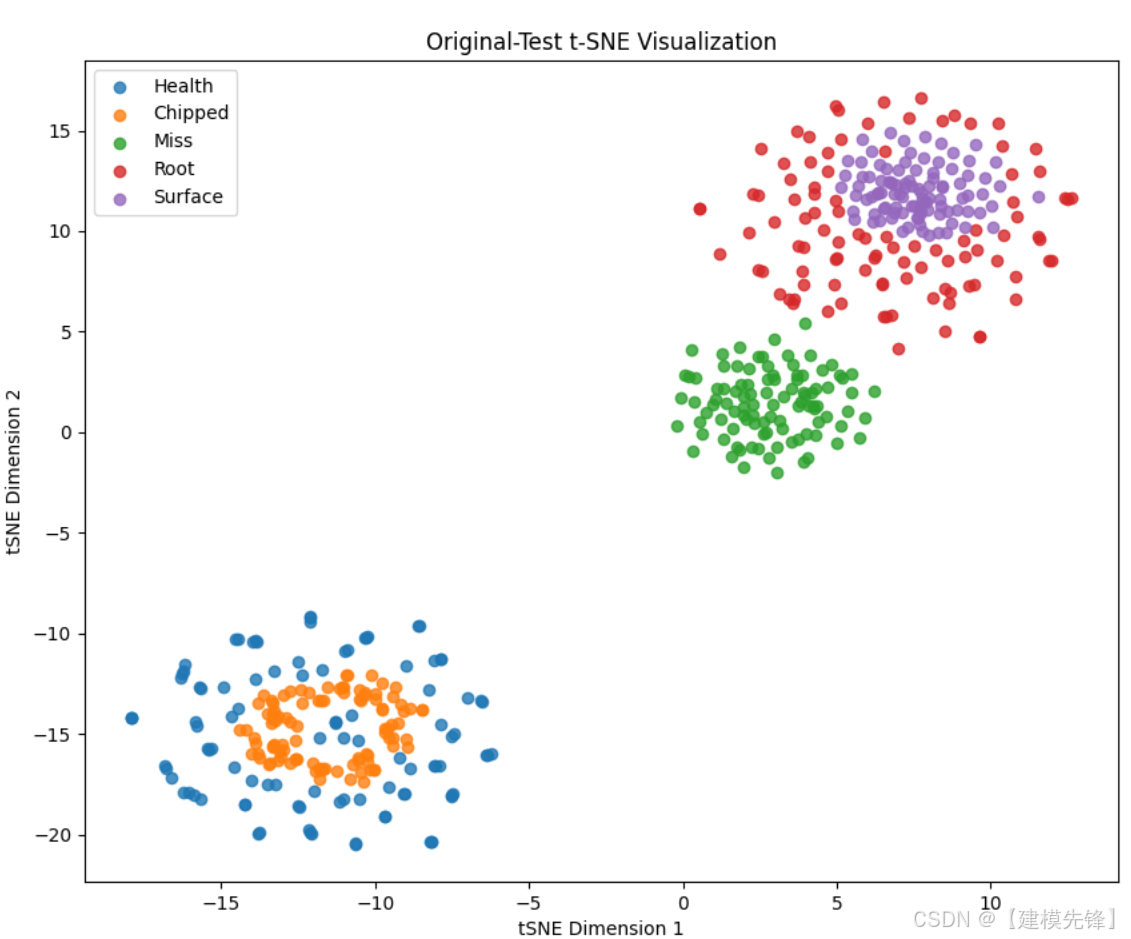
(4)原始数据 t-SNE特征可视化
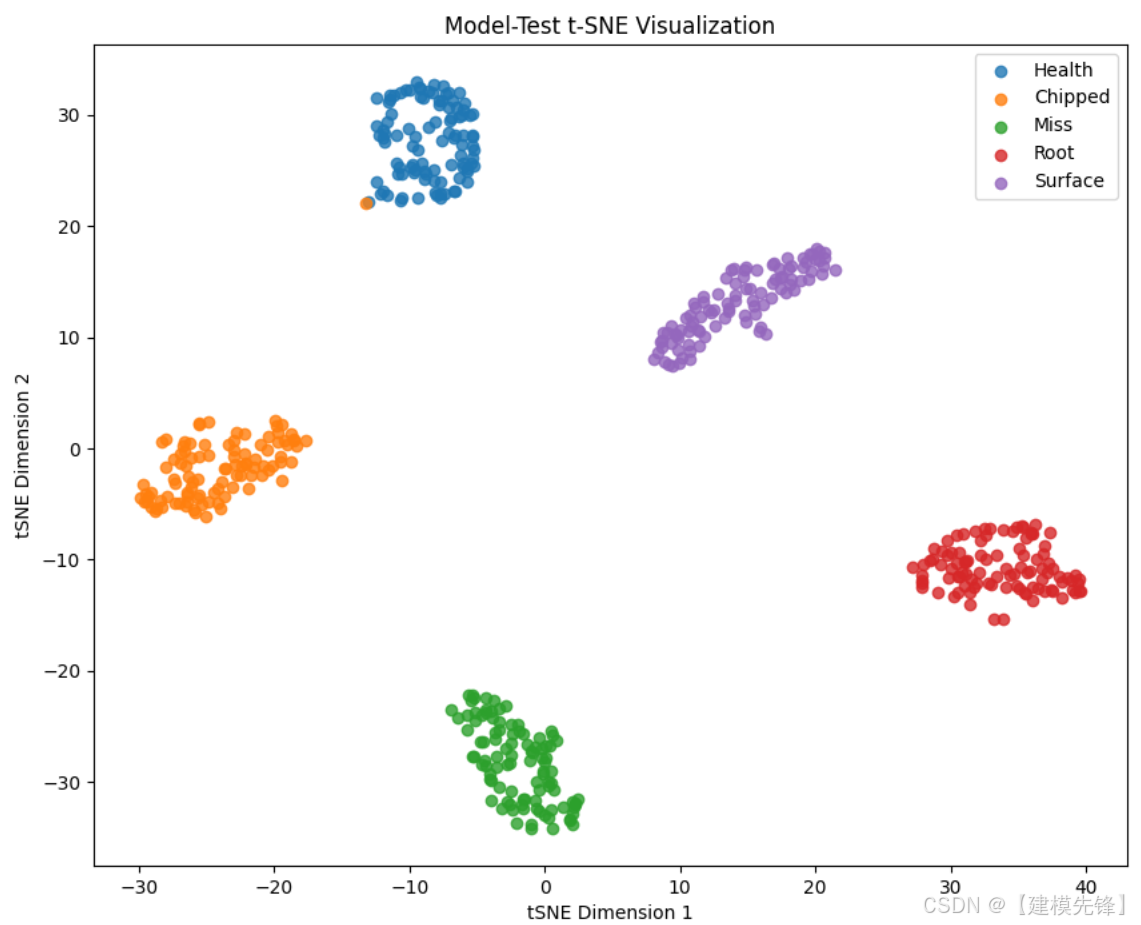
(5)模型训练后的 t-SNE特征可视化:
4 代码、数据整理如下:
点击下方卡片获取代码!