MARL
MPE
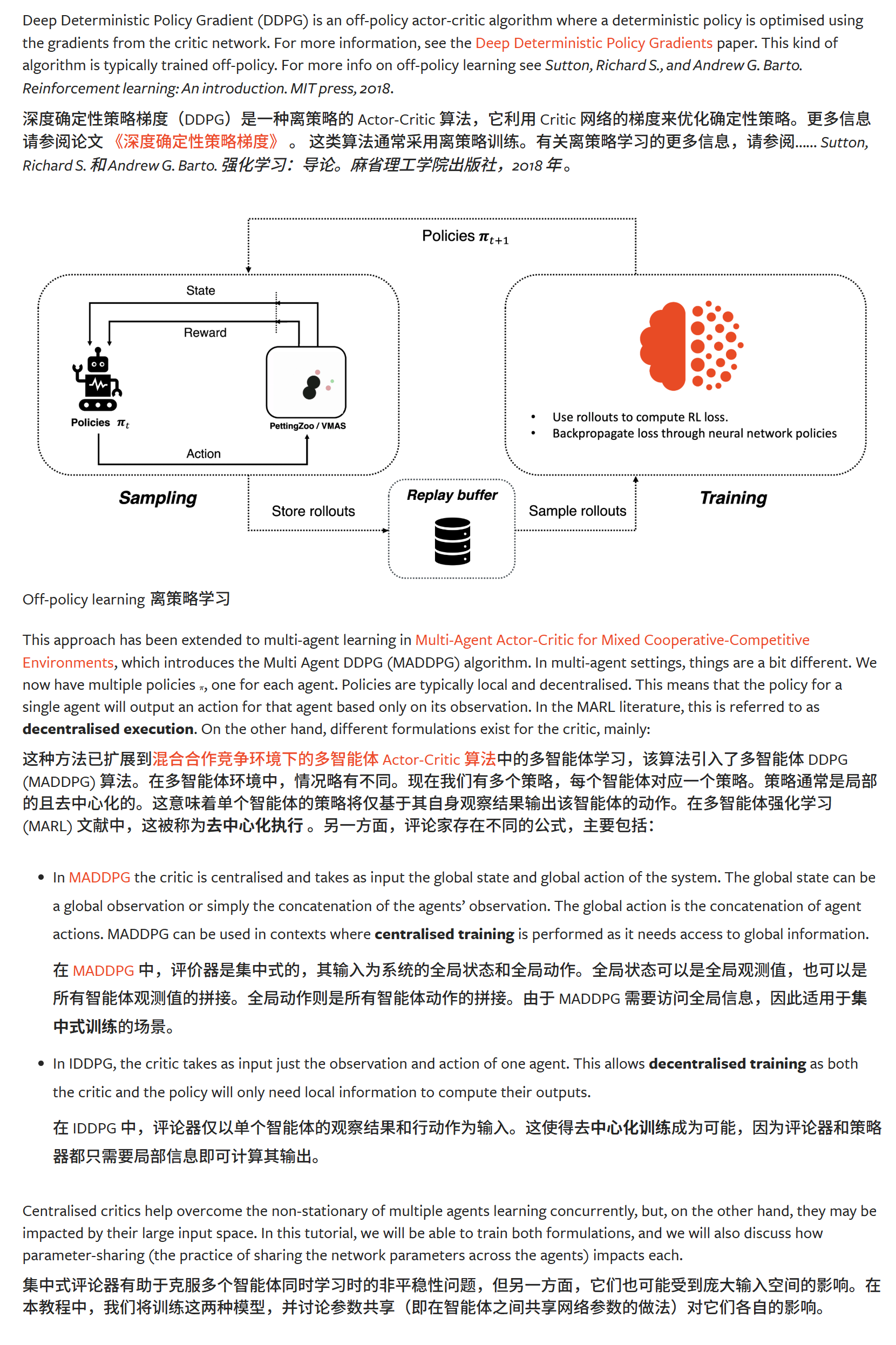
MADDPG
off-policy
教程
流程还是一样;
1.依赖项
2.超参数

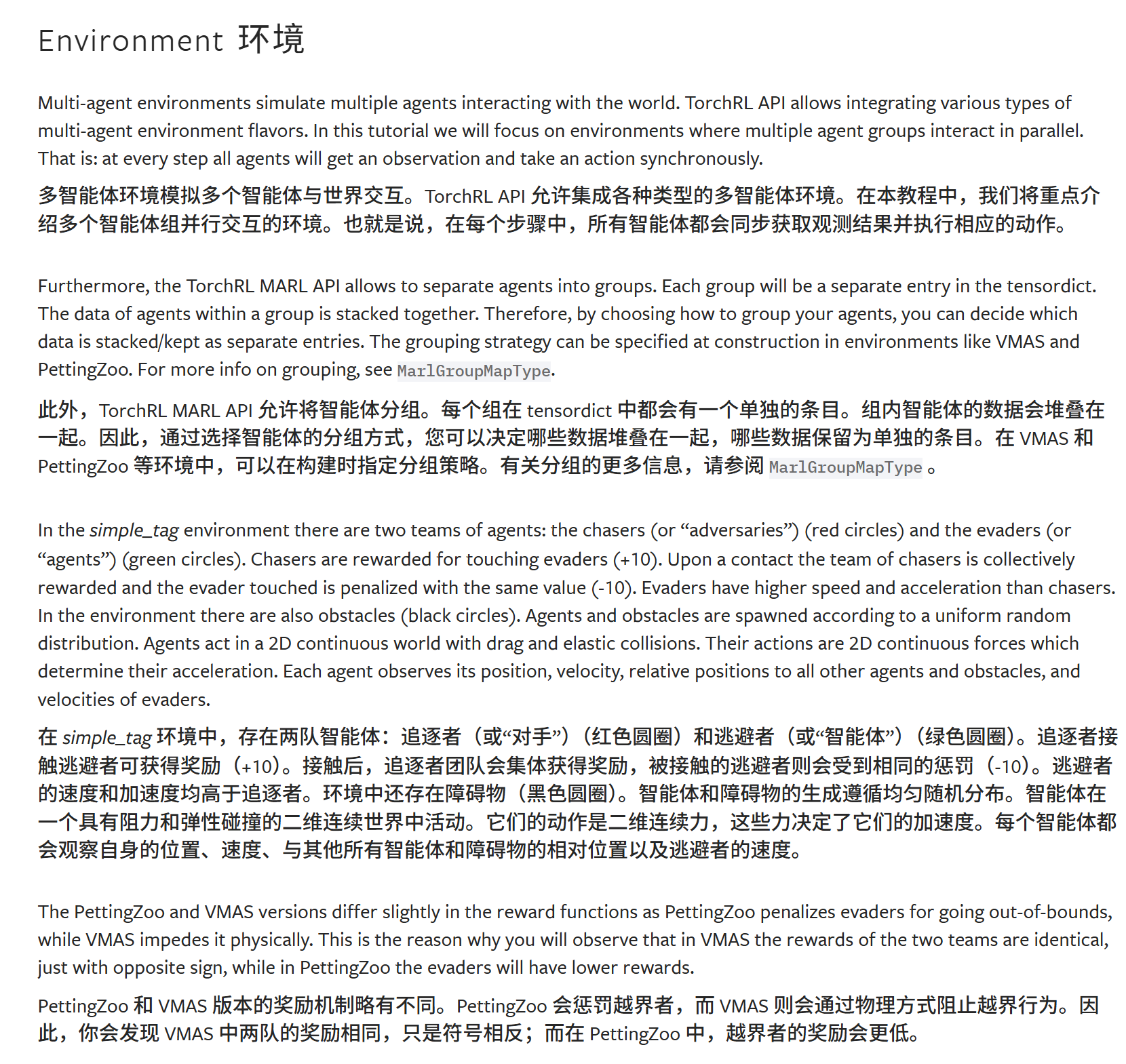
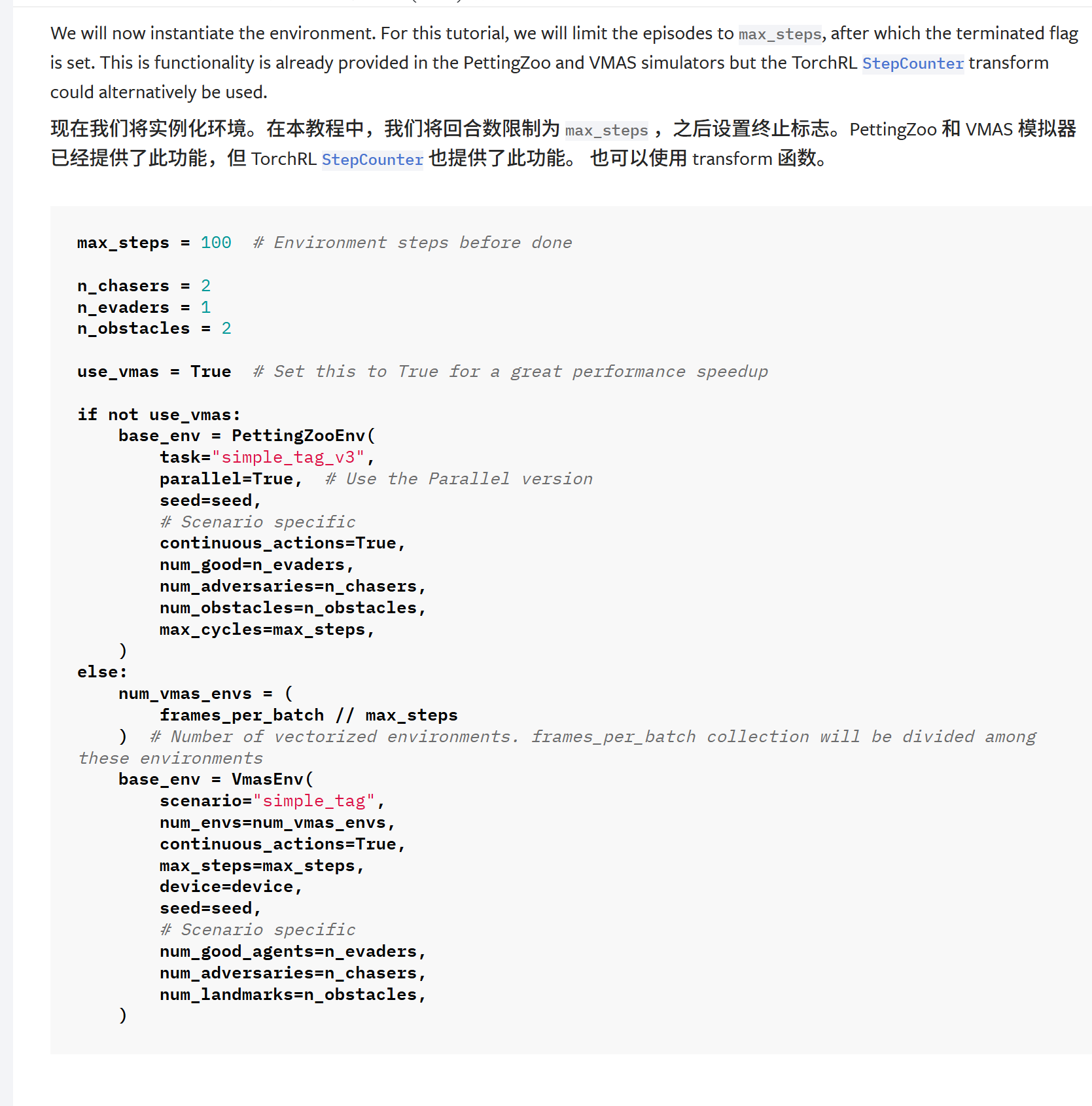
3.环境
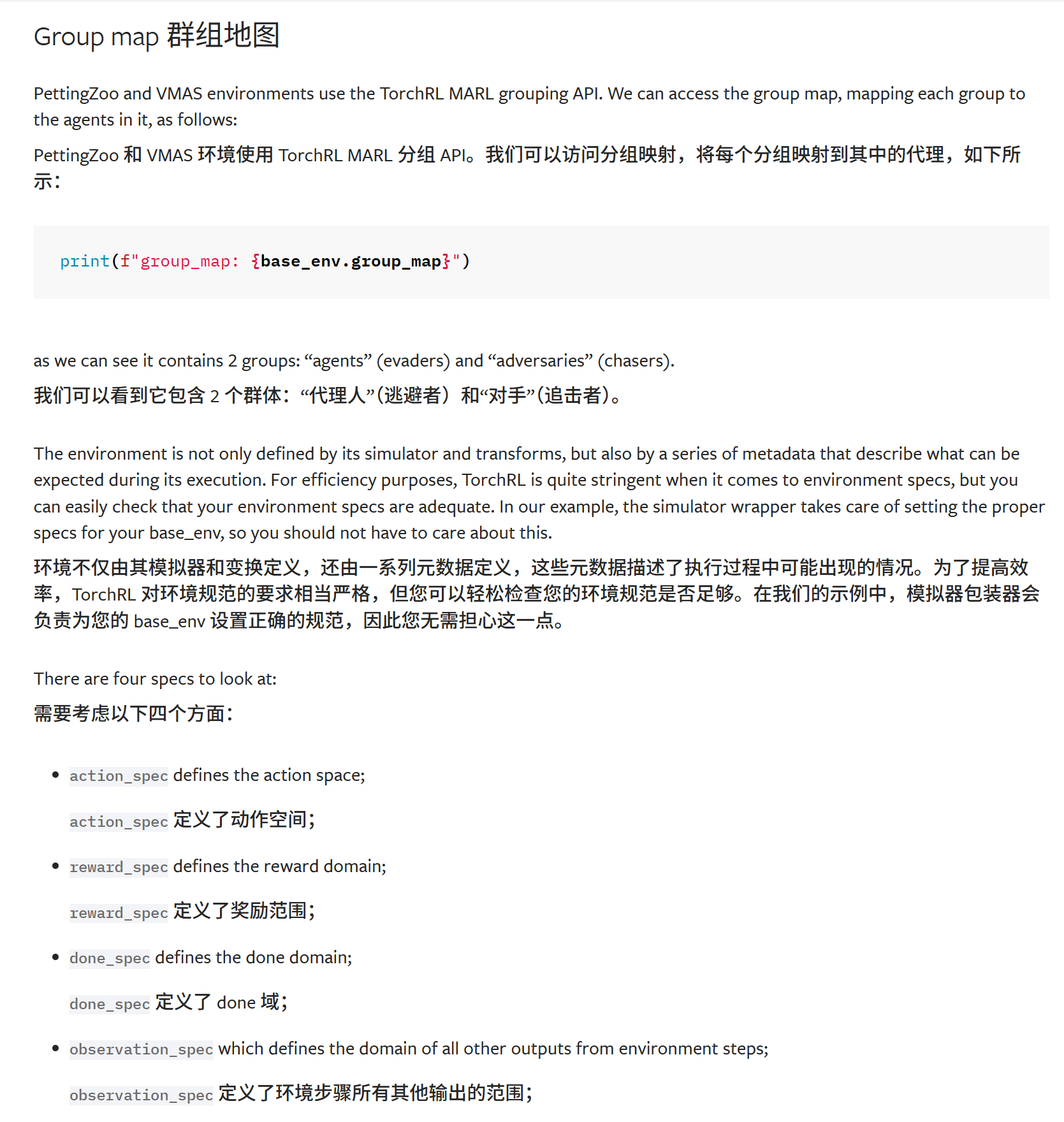
就是说智能体被分组了;
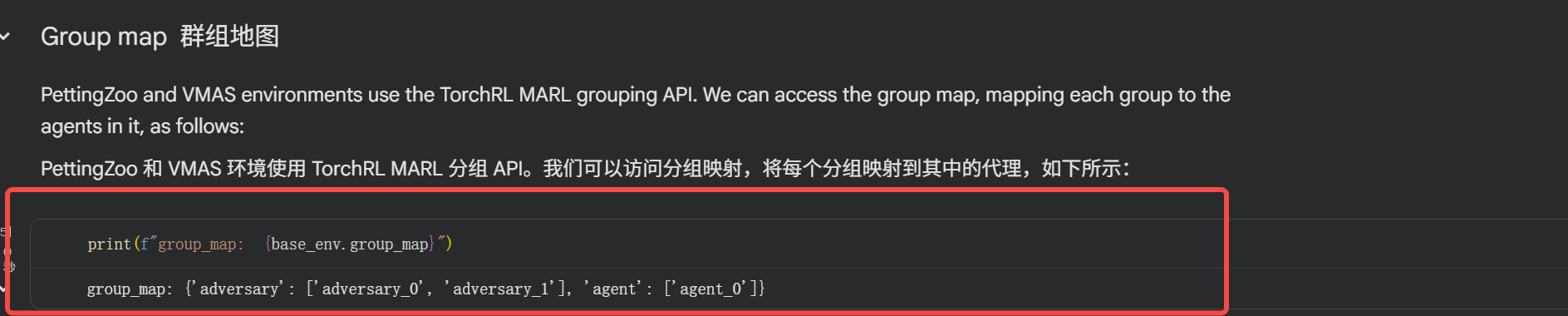
可以看到分组的map;
此外,还跟以前一样,说明ENV不仅包括了基本simulator和transforms,这些元数据描述了执行过程中可能出现的情况。为了提高效率,TorchRL 对环境规范的要求相当严格,但您可以轻松检查您的环境规范是否足够。
python
action_spec: Composite(
adversary: Composite(
action: BoundedContinuous(
shape=torch.Size([10, 2, 2]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([10, 2, 2]), device=cuda:0, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([10, 2, 2]), device=cuda:0, dtype=torch.float32, contiguous=True)),
device=cuda:0,
dtype=torch.float32,
domain=continuous),
device=cuda:0,
shape=torch.Size([10, 2]),
data_cls=None),
agent: Composite(
action: BoundedContinuous(
shape=torch.Size([10, 1, 2]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([10, 1, 2]), device=cuda:0, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([10, 1, 2]), device=cuda:0, dtype=torch.float32, contiguous=True)),
device=cuda:0,
dtype=torch.float32,
domain=continuous),
device=cuda:0,
shape=torch.Size([10, 1]),
data_cls=None),
device=cuda:0,
shape=torch.Size([10]),
data_cls=None)
reward_spec: Composite(
adversary: Composite(
reward: UnboundedContinuous(
shape=torch.Size([10, 2, 1]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([10, 2, 1]), device=cuda:0, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([10, 2, 1]), device=cuda:0, dtype=torch.float32, contiguous=True)),
device=cuda:0,
dtype=torch.float32,
domain=continuous),
device=cuda:0,
shape=torch.Size([10, 2]),
data_cls=None),
agent: Composite(
reward: UnboundedContinuous(
shape=torch.Size([10, 1, 1]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([10, 1, 1]), device=cuda:0, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([10, 1, 1]), device=cuda:0, dtype=torch.float32, contiguous=True)),
device=cuda:0,
dtype=torch.float32,
domain=continuous),
device=cuda:0,
shape=torch.Size([10, 1]),
data_cls=None),
device=cuda:0,
shape=torch.Size([10]),
data_cls=None)
done_spec: Composite(
done: Categorical(
shape=torch.Size([10, 1]),
space=CategoricalBox(n=2),
device=cuda:0,
dtype=torch.bool,
domain=discrete),
terminated: Categorical(
shape=torch.Size([10, 1]),
space=CategoricalBox(n=2),
device=cuda:0,
dtype=torch.bool,
domain=discrete),
device=cuda:0,
shape=torch.Size([10]),
data_cls=None)
observation_spec: Composite(
adversary: Composite(
observation: UnboundedContinuous(
shape=torch.Size([10, 2, 14]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([10, 2, 14]), device=cuda:0, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([10, 2, 14]), device=cuda:0, dtype=torch.float32, contiguous=True)),
device=cuda:0,
dtype=torch.float32,
domain=continuous),
device=cuda:0,
shape=torch.Size([10, 2]),
data_cls=None),
agent: Composite(
observation: UnboundedContinuous(
shape=torch.Size([10, 1, 12]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([10, 1, 12]), device=cuda:0, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([10, 1, 12]), device=cuda:0, dtype=torch.float32, contiguous=True)),
device=cuda:0,
dtype=torch.float32,
domain=continuous),
device=cuda:0,
shape=torch.Size([10, 1]),
data_cls=None),
device=cuda:0,
shape=torch.Size([10]),
data_cls=None)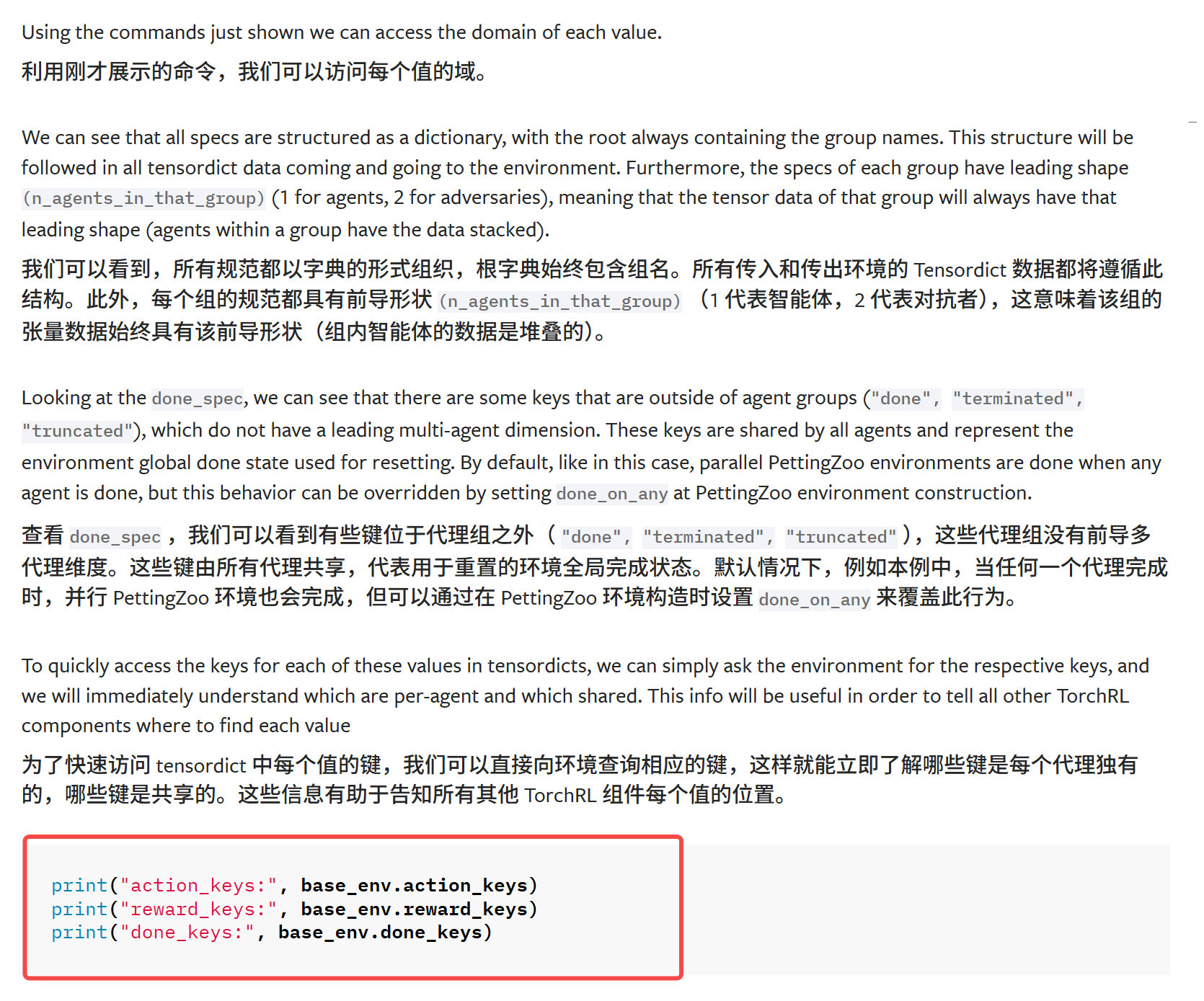
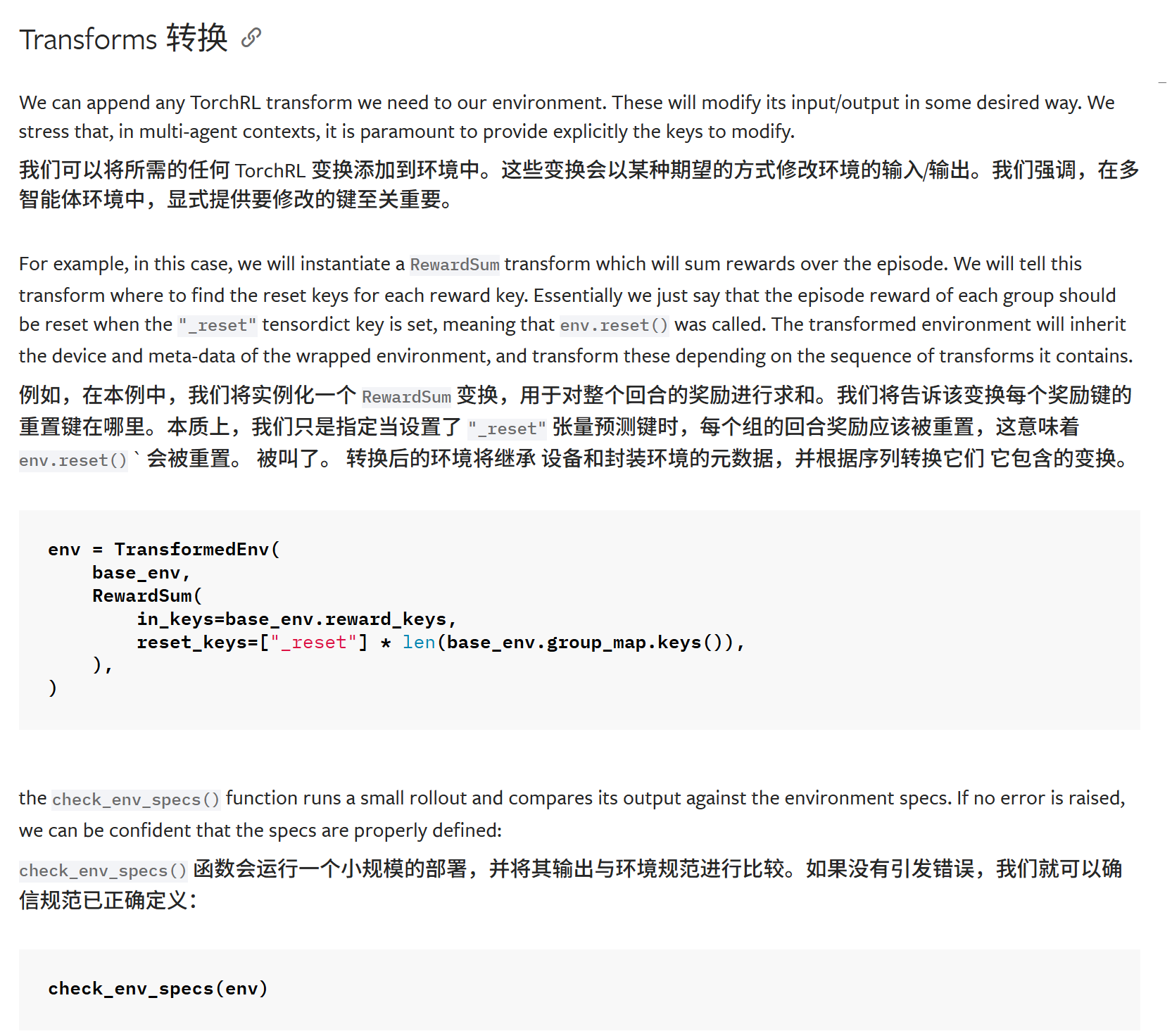
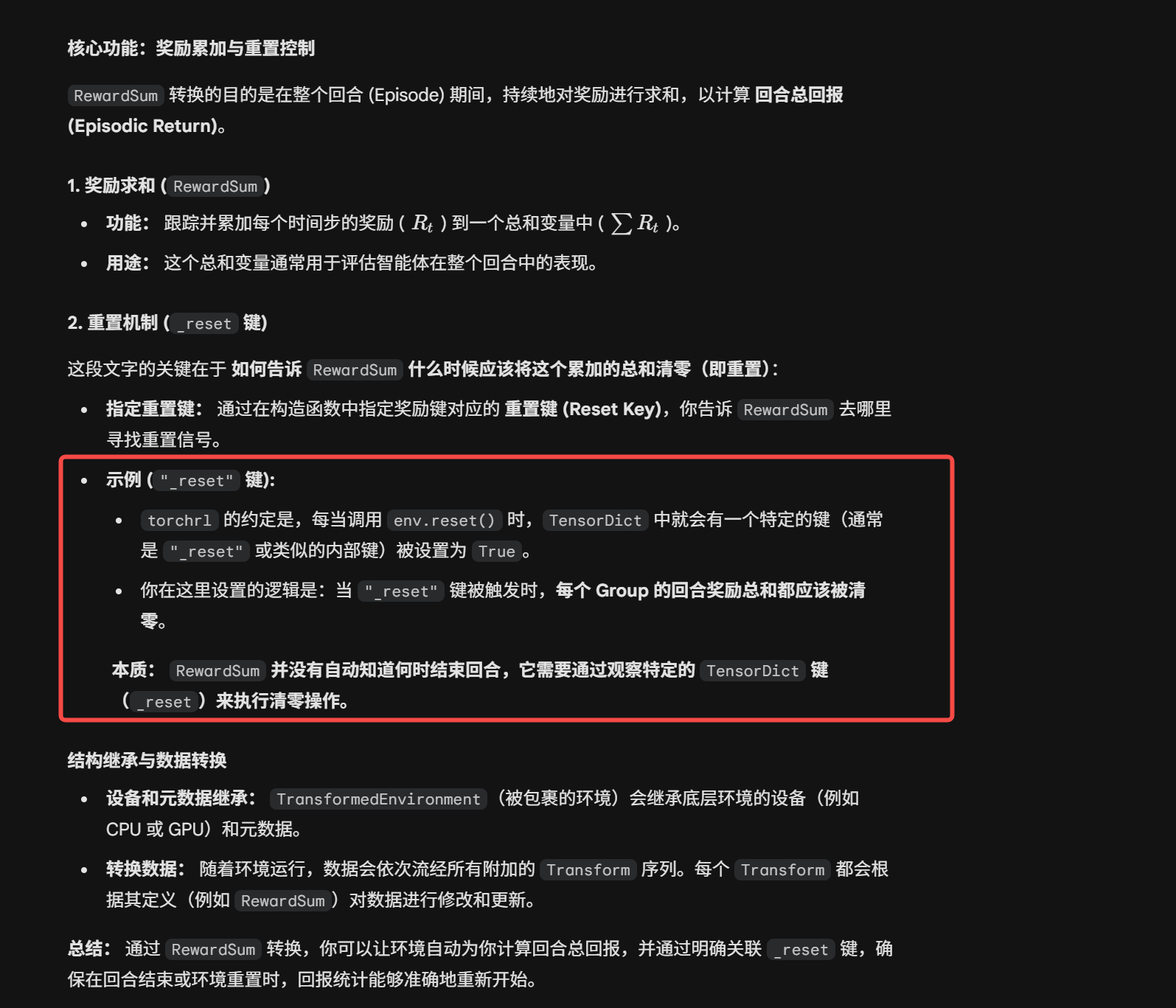
其实就是对环境做上层的包装
这段和之前的描述无区别
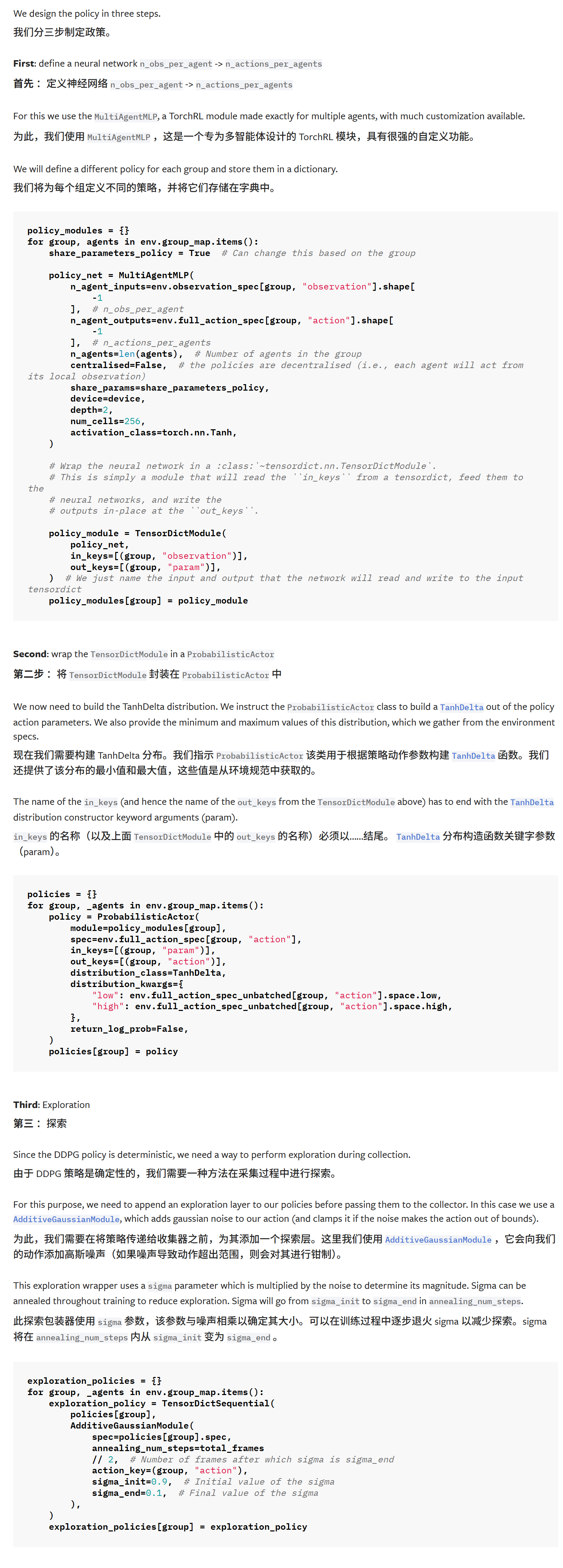
4.Policy
流程:
构造原始网络得到分布参数
根据参数构造分布,采样动作
add噪声,增加探索;
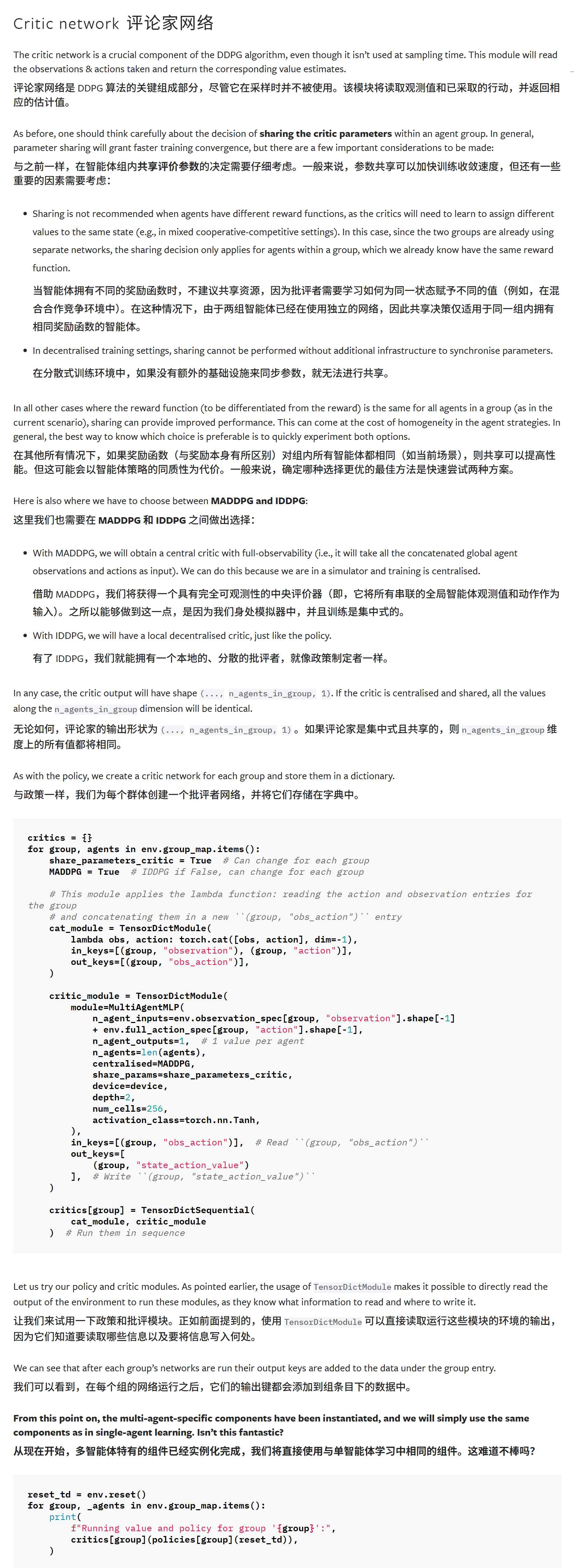
5.Critic
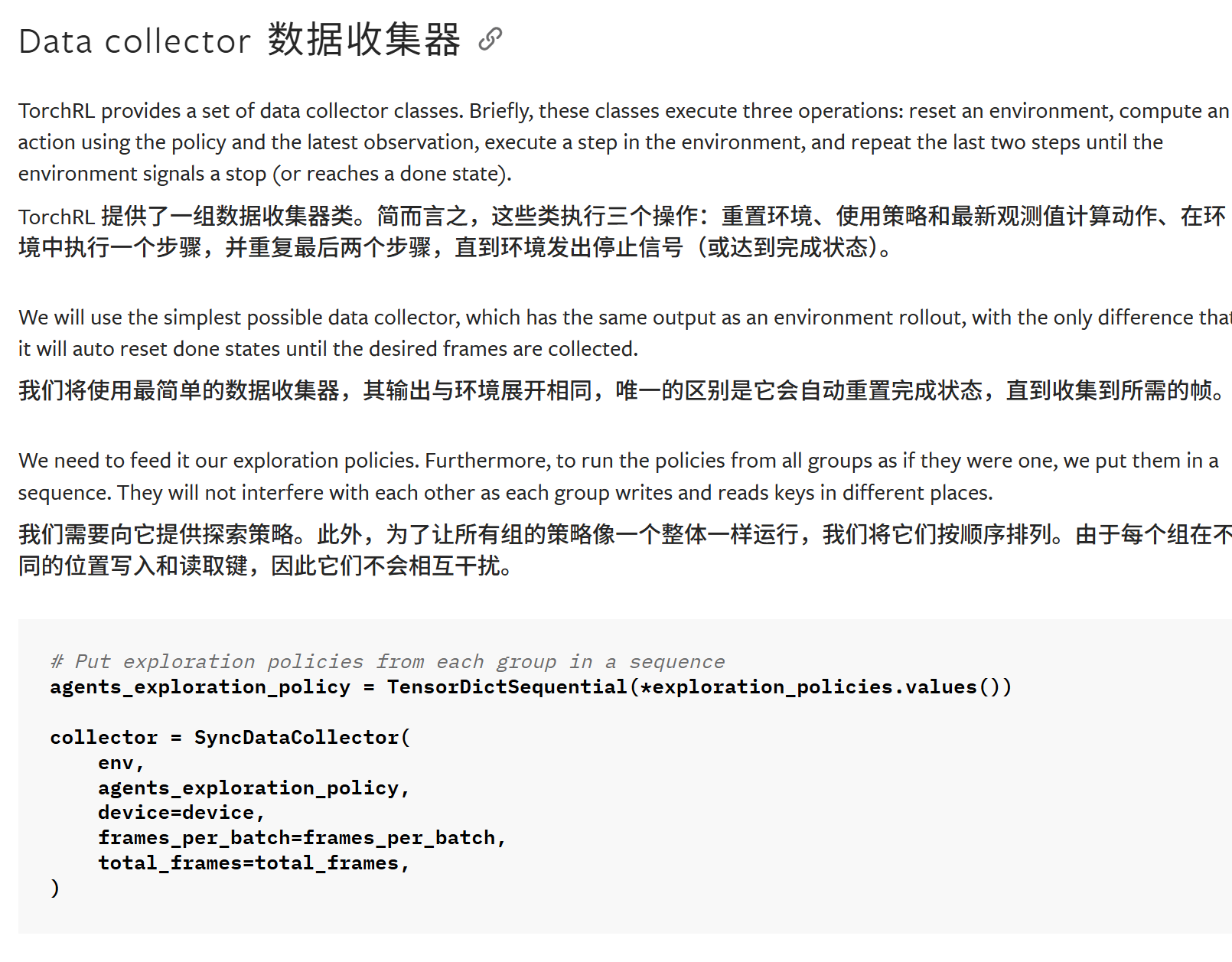
6.Collector
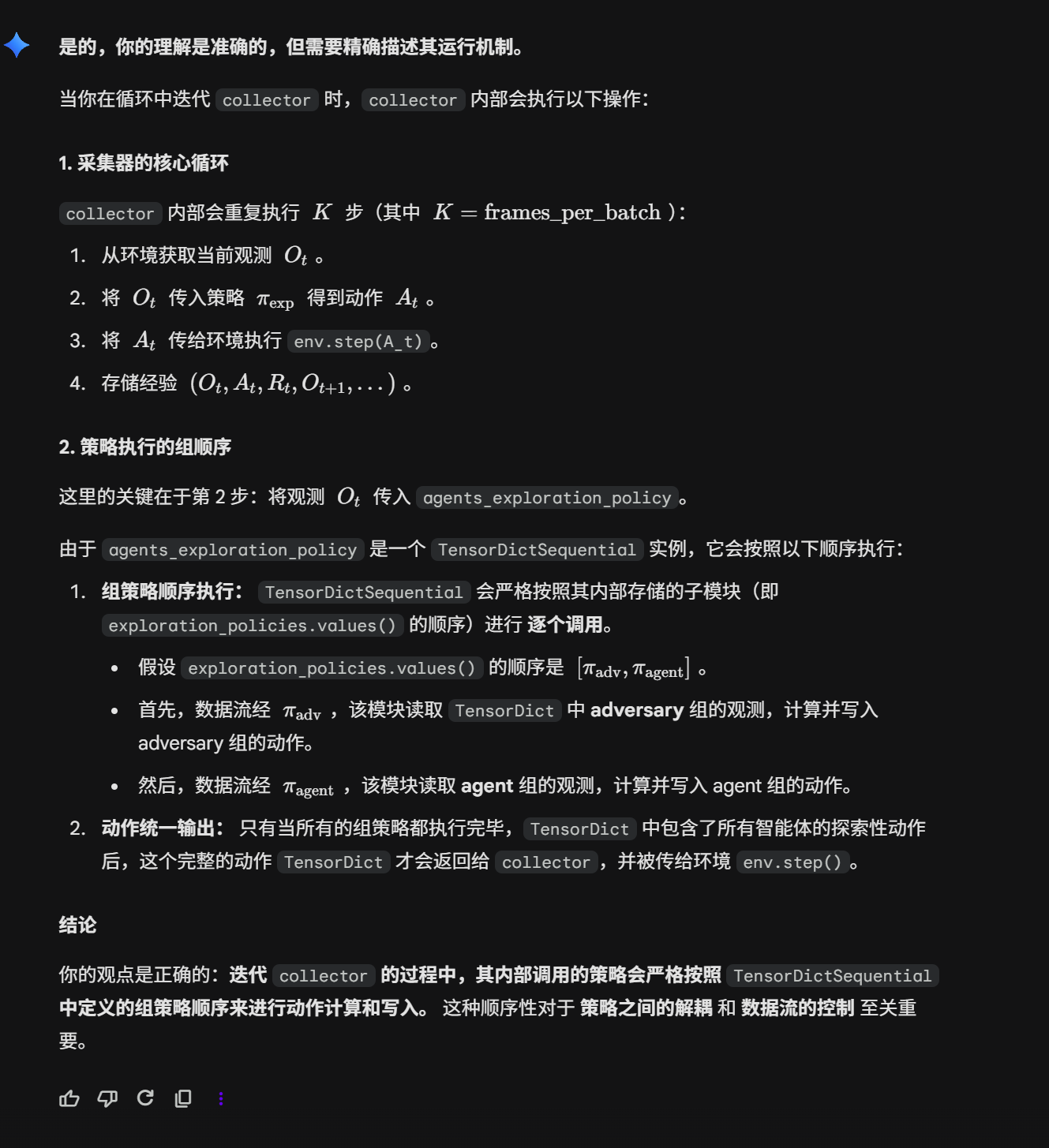
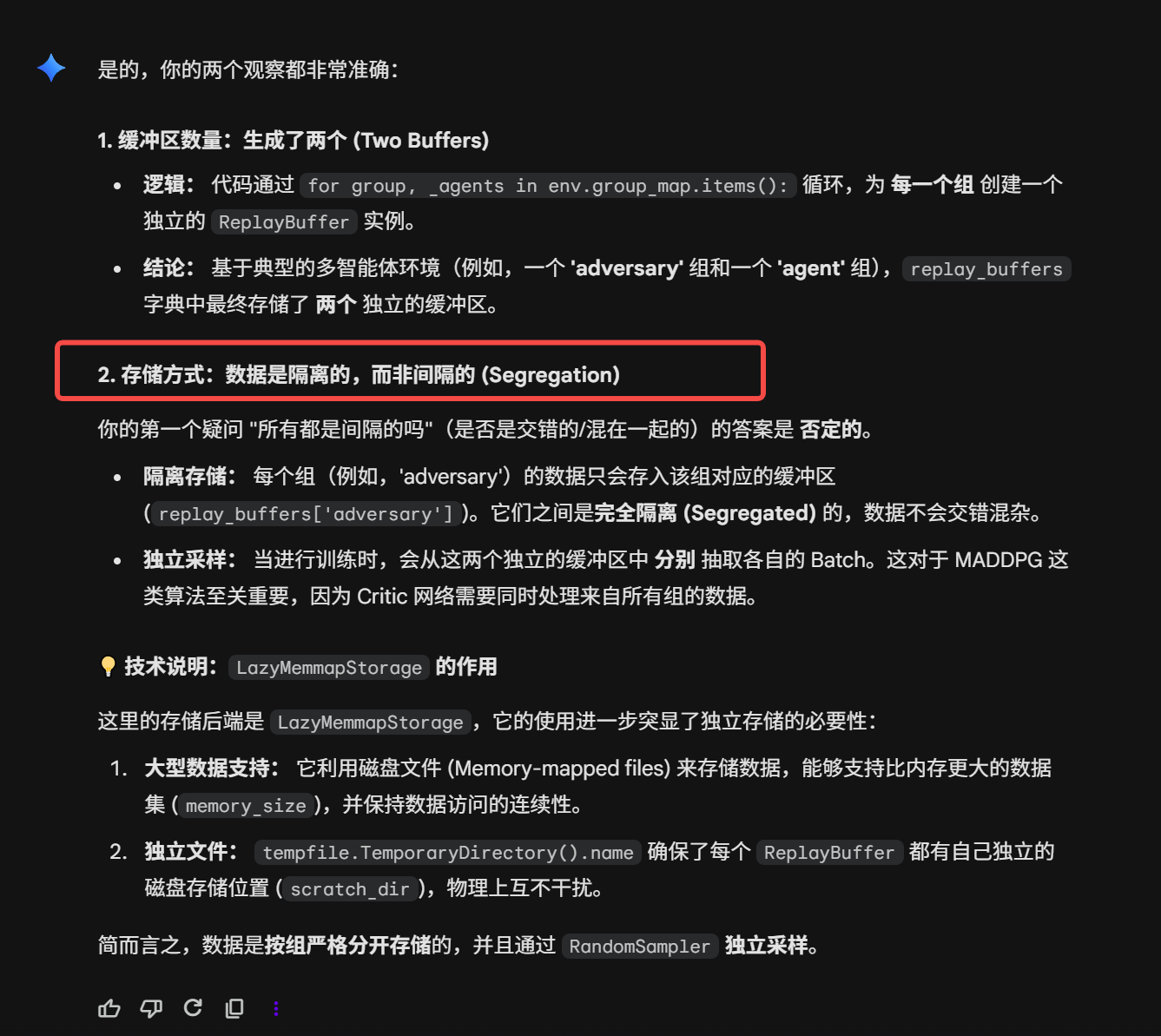
7.Replybuffer

严格分离
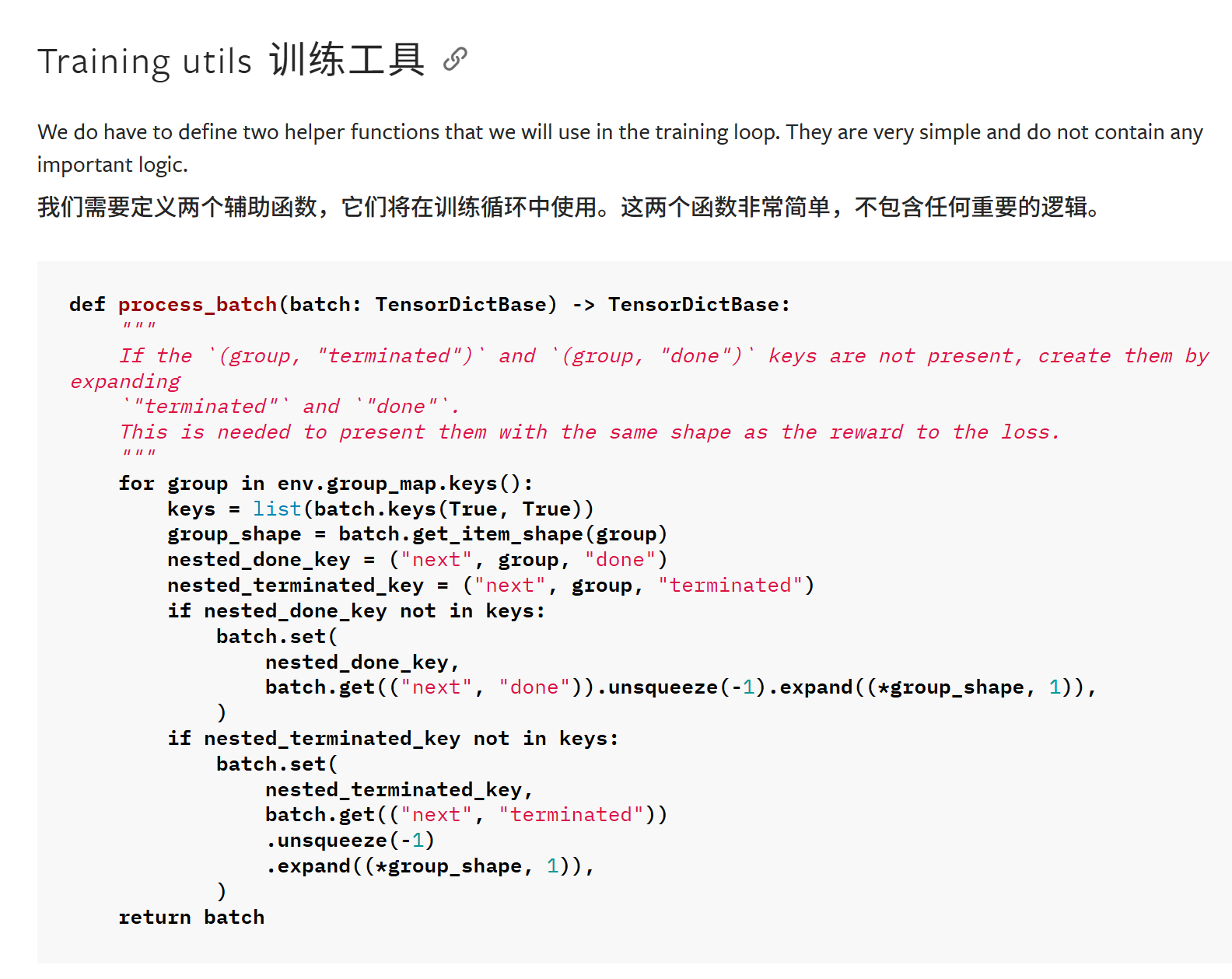
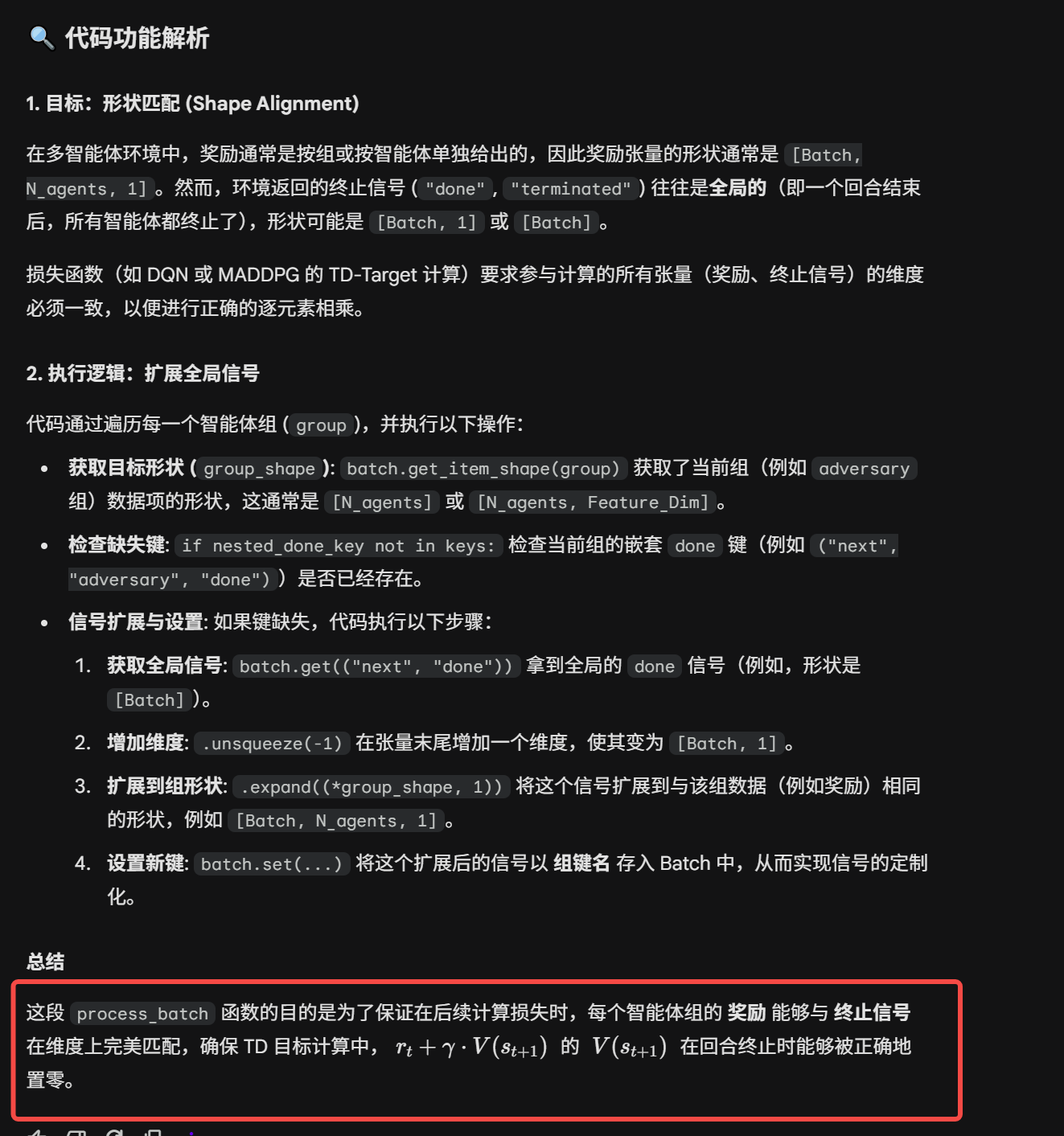
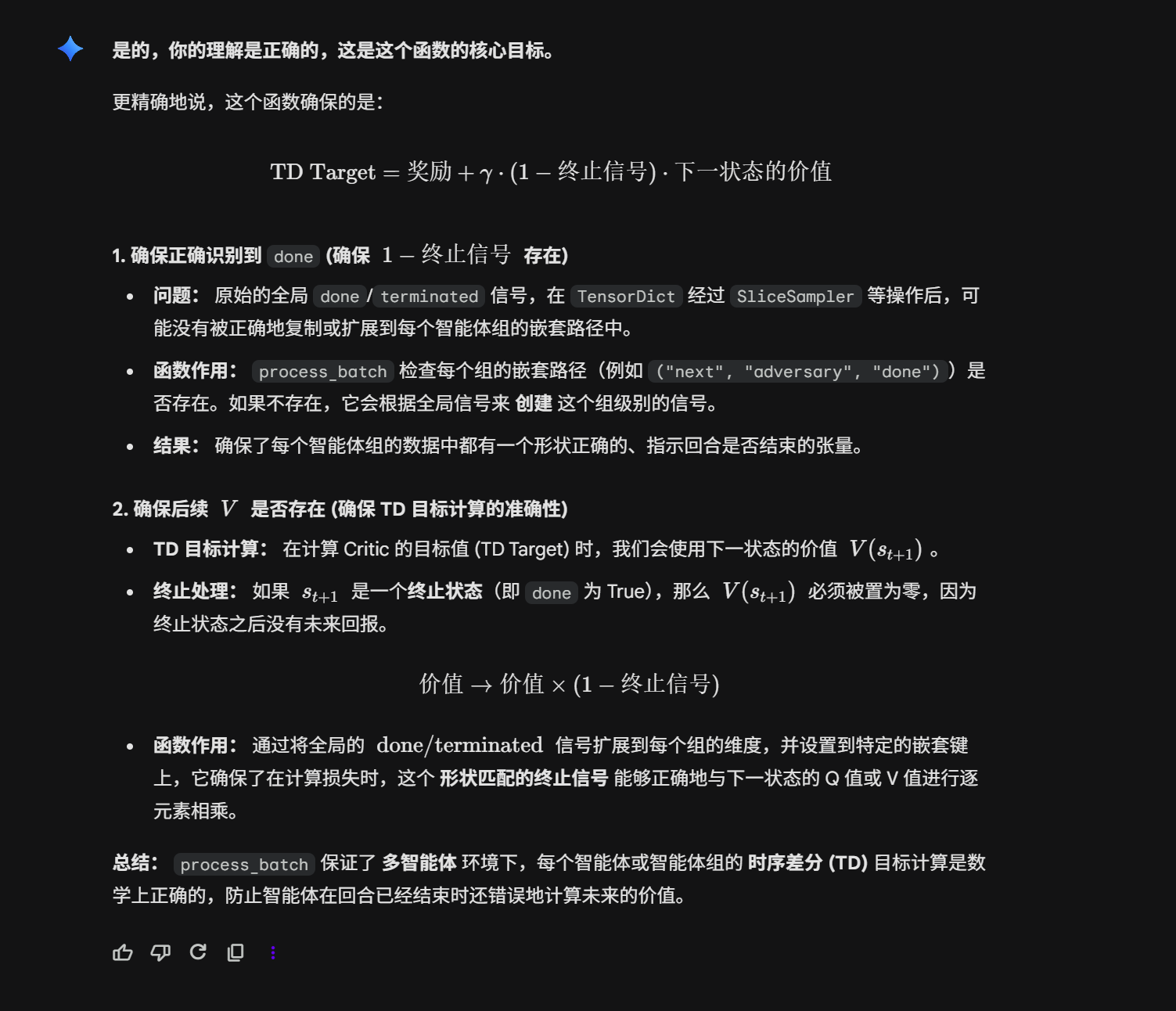
8.utils
将done和terminated扩展到group而不再是全局,因为后面的V需要能被正确识别是否是done;
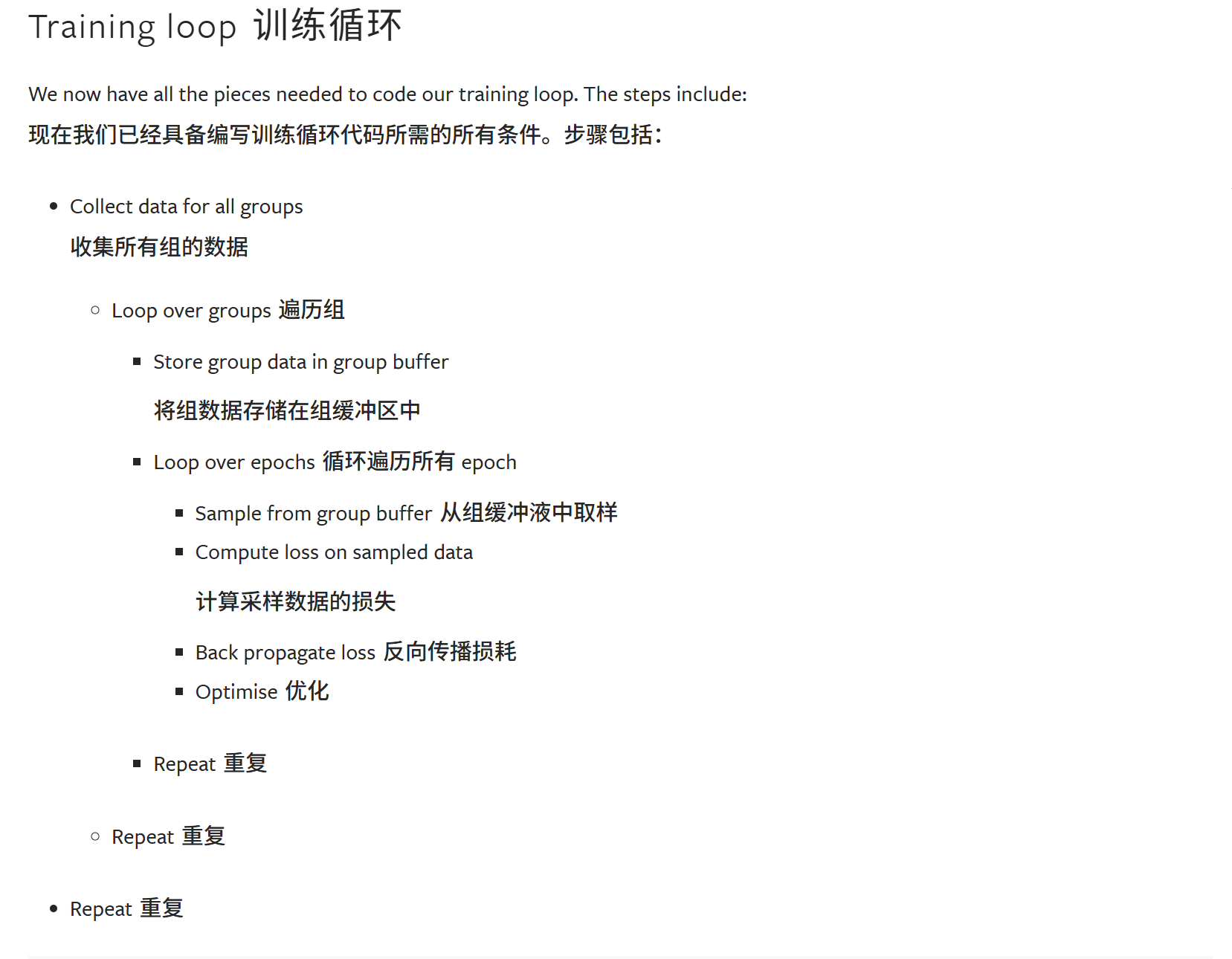
9.Train_loop