目录
[1. 蜂鸣器概述](#1. 蜂鸣器概述)
[2. 模块电路](#2. 模块电路)
[3. 蜂鸣器驱动电路](#3. 蜂鸣器驱动电路)
[4. 软件设计](#4. 软件设计)
1. 蜂鸣器概述
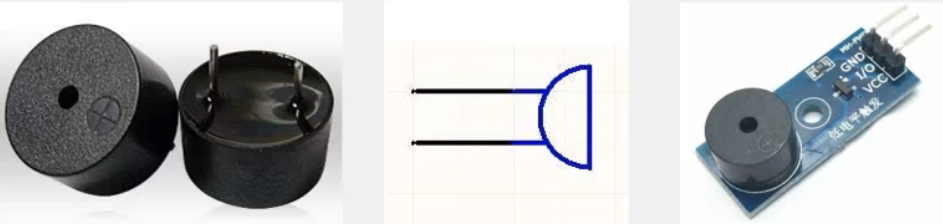
蜂鸣器是一种将电信号转化为声音信号的器件,常用来产生设备的按键音、报警音等提示信号
蜂鸣器按驱动方式分为有源蜂鸣器 (电磁式蜂鸣器)和无源蜂鸣器(压电式蜂鸣器)
有源蜂鸣器:一般由振荡器、电磁线圈、磁铁、震动膜片、外壳共同组成。内部自带震荡源,将正负极接上直流电压即可持续发声,频率固定
无源蜂鸣器:一般由多谐振荡器,压电蜂鸣片、阻抗匹配器、共鸣箱、外壳共同组成。内部不带震荡源,需要控制器提供震荡脉冲才可发声,调整提供震荡脉冲的频率,可发出不同频率的声音
(对于无源蜂鸣器,输入频率变化的电流才会发出声音。在上电的一瞬间,电流从 0 到 1 瞬间产生一次跳变,所以无源蜂鸣器会响)
2. 模块电路
通过 P2^5 管脚输出一定频率的脉冲信号,控制蜂鸣器工作;
当 P2^5 输出高电平,BEFF 则输出低电平;
当 P2^5 输出低电平,BEFF 则输出高电平;
(图中并没有使用三极管放大电流,而是使用 ULN2003 芯片来驱动)
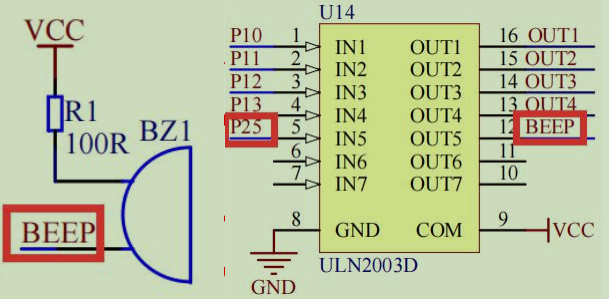
开发板上使用的是无源蜂鸣器,需要连续输出一定频率的脉冲(高低电平)信号才会发声
因此需要让 P2^5 引脚以一定频率不断输出高低电平信号才能控制蜂鸣器发出声音
3. 蜂鸣器驱动电路
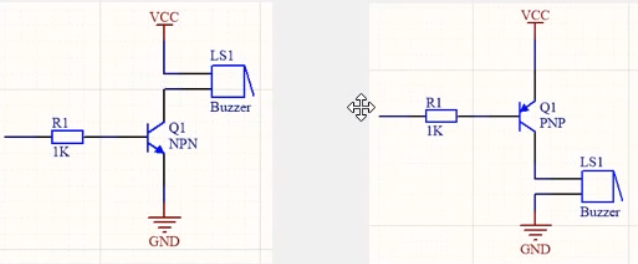
蜂鸣器的功率一般较大,单片机的 IO 口不能直接驱动,需要增加驱动电路
最常用的驱动电路是三极管驱动
NPN型:高电平导通,低电平闭合
PNP型:低电平导通,高电平闭合
此外,驱动电路还有 集成电路驱动
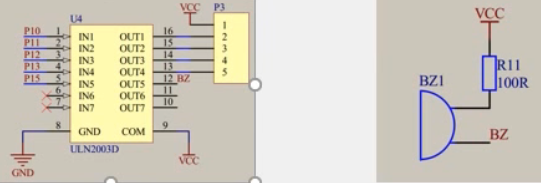
其主要依赖驱动芯片 ULN2003(达林顿晶体管阵列)
达林顿晶体管是两个三极管驱动复合成的,故又称为 **复合管,**可以增大驱动能力
达林顿晶体管常用于步进电机的驱动
4. 软件设计
无源蜂鸣器需要提供一定频率的脉冲信号才能发声,频率大小通常在 1.5 - 5KHZ之间
蜂鸣器发声的本质是:通过高低电平交替产生交流信号驱动振膜振动,振动频率即为发声频率
频率 f(单位:Hz):每秒振动的次数;
周期 T(单位:s):完成一次振动(高电平 + 低电平 )的总时间,满足 T = 1/f;
延时时间:需让高电平和低电平各占「半个周期」(否则无法形成对称振动,声音失真或不发声),因此单端延时时间 :T=2t ,t= 1/(2f)。
最低频率(1.5KHz)对应的最大延时
t_max = 1/(2×1500) ≈ 0.000333 秒 = 333 微秒(μs)
最高频率(5KHz)对应的最小延时
t_min = 1/(2×5000) = 0.0001 秒 = 100 微秒(μs)
实验:蜂鸣器发出声音,一段时间后关闭。
cpp
#include <at89c51RC2.h>
//蜂鸣器实验
typedef unsigned char u8;
typedef unsigned int u16;
sbit BEEP = P2^5;
//延时函数
void Delay10us(u8 time) //@11.0592MHz 10us
{
unsigned char data i;
while(time--)
{
i = 2;
while (--i);
}
}
void main()
{
u16 i = 2000; //蜂鸣器发出声音的时间段
while(1)
{
while(i--)
{
BEEP = !BEEP; //y引脚电平反转:高、低、高、低、高......
Delay10us(20); //形成200us高电平,200us低电平的交替信号
}
i = 0; //蜂鸣器停止发声
BEEP = 0; //蜂鸣器停止发声后,固定引脚为低电平,避免干扰和杂声,让停止状态更稳定
}
}控制蜂鸣器声音的大小:
cpp
#include <at89c51RC2.h>
//蜂鸣器实验:蜂鸣器响一阵后停止发声
typedef unsigned char u8;
typedef unsigned int u16;
sbit BEEP = P2^5;
//延时函数
void Delay10us(u8 time) //@11.0592MHz 10us
{
unsigned char data i;
while(time--)
{
i = 2;
while (--i);
}
}
void main()
{
u16 i = 2000; //蜂鸣器发出声音的时间段
while(1)
{
while(i--)
{
// BEEP = !BEEP; //y引脚电平反转:高、低、高、低、高......
// Delay10us(20); //形成200us高电平,200us低电平的交替信号
//改变声音大小
BEEP = 0;
Delay10us(10);
BEEP = 1;
Delay10us(30); //高低电平时间加在一起仍为一个周期即可,这里一周是 40
}
i = 0; //蜂鸣器停止发声
BEEP = 0; //蜂鸣器停止发声后,固定引脚为低电平,避免干扰和杂声,让停止状态更稳定
}
}