文章目录
-
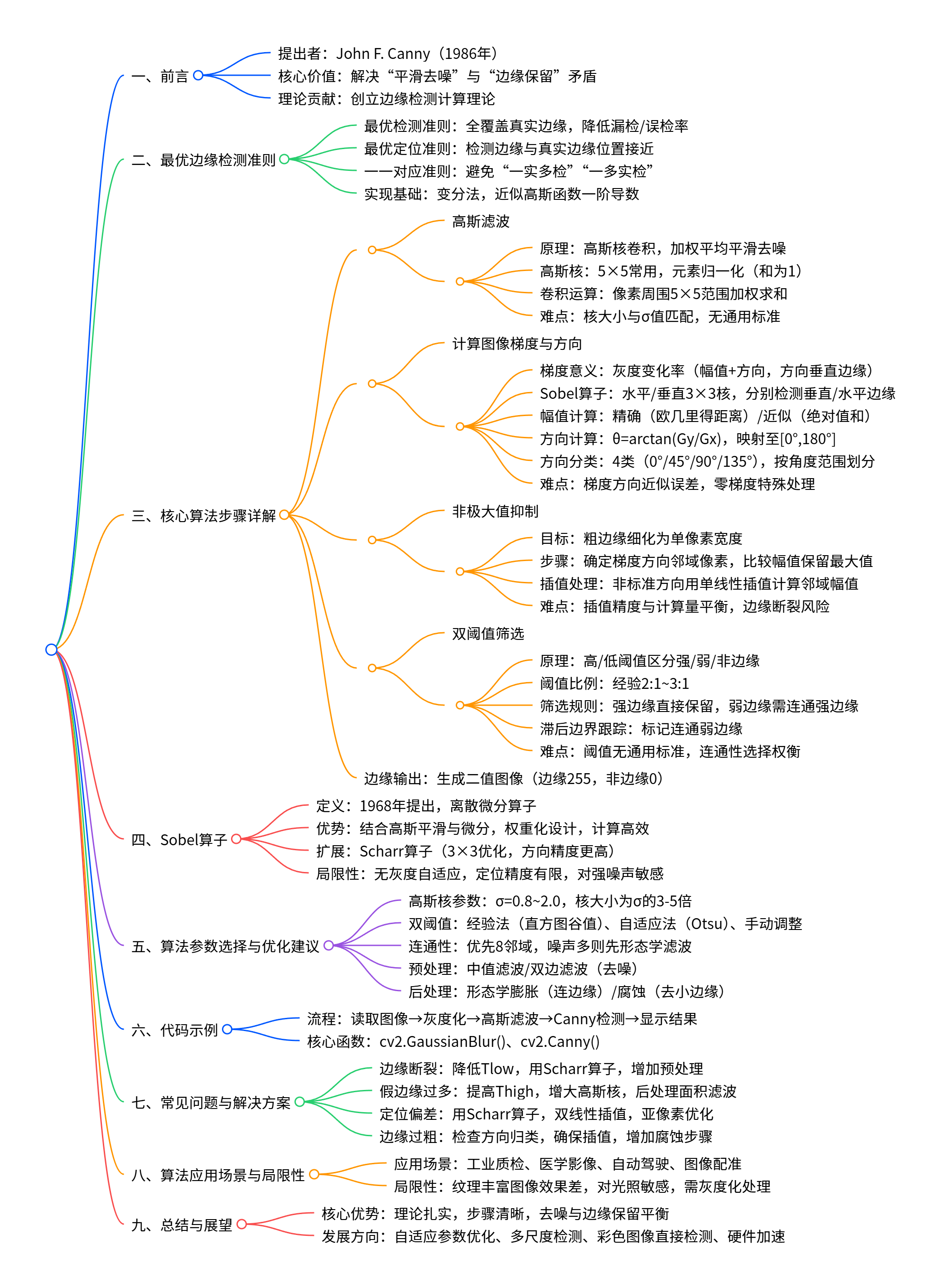
- 思维导图
- 一、前言
- 二、最优边缘检测准则
-
- [1. 最优检测准则](#1. 最优检测准则)
- [2. 最优定位准则](#2. 最优定位准则)
- [3. 检测点与边缘点](#3. 检测点与边缘点)
- 三、核心算法步骤详解
-
- [1. 高斯滤波](#1. 高斯滤波)
-
- [1.1 原理与必要性](#1.1 原理与必要性)
- [1.2 高斯核的定义与计算](#1.2 高斯核的定义与计算)
- [1.3 卷积运算过程](#1.3 卷积运算过程)
- [1.4 难点标注](#1.4 难点标注)
- [2. 计算图像梯度与方向](#2. 计算图像梯度与方向)
-
- [2.1 梯度的物理意义](#2.1 梯度的物理意义)
- [2.2 Sobel算子:梯度计算的工具](#2.2 Sobel算子:梯度计算的工具)
- [2.3 梯度幅值与方向计算](#2.3 梯度幅值与方向计算)
- [2.4 边缘方向分类](#2.4 边缘方向分类)
- [2.5 难点标注](#2.5 难点标注)
- [3. 非极大值抑制](#3. 非极大值抑制)
-
- [3.1 原理与目标](#3.1 原理与目标)
- [3.2 实现步骤](#3.2 实现步骤)
- [3.3 插值处理](#3.3 插值处理)
- [3.4 难点标注](#3.4 难点标注)
- [4. 双阈值筛选](#4. 双阈值筛选)
-
- [4.1 原理与必要性](#4.1 原理与必要性)
- [4.2 阈值设定原则](#4.2 阈值设定原则)
- [4.3 筛选规则](#4.3 筛选规则)
- [4.4 滞后边界跟踪](#4.4 滞后边界跟踪)
- [4.5 难点标注](#4.5 难点标注)
- [5. 边缘输出](#5. 边缘输出)
- [四、 Sobel算子](#四、 Sobel算子)
-
- [1. Sobel算子的定义与优势](#1. Sobel算子的定义与优势)
- [2. Sobel算子的扩展](#2. Sobel算子的扩展)
- [3. Sobel算子的局限性](#3. Sobel算子的局限性)
- 五、算法参数选择与优化建议
-
- [1. 高斯核参数( σ \sigma σ 与核大小)](#1. 高斯核参数( σ \sigma σ 与核大小))
- [2. 双阈值( T h i g h T_{high} Thigh 与 T l o w T_{low} Tlow)](#2. 双阈值( T h i g h T_{high} Thigh 与 T l o w T_{low} Tlow))
- [3. 边缘连通性判断](#3. 边缘连通性判断)
- [4. 预处理与后处理优化](#4. 预处理与后处理优化)
- 六、代码示例
- 七、常见问题与解决方案
- 八、算法应用场景与局限性
-
- [1. 典型应用场景](#1. 典型应用场景)
-
- [1.1 工业质检](#1.1 工业质检)
- [1.2 医学影像](#1.2 医学影像)
- [1.3 自动驾驶](#1.3 自动驾驶)
- [1.4 图像配准](#1.4 图像配准)
- [2. 局限性](#2. 局限性)
- 九、总结与展望
思维导图
一、前言
Canny边缘检测算法是由John F. Canny于1986年提出的一种基于图像梯度计算的多级边缘检测算法,至今仍是计算机视觉领域应用最广泛的边缘检测方法之一。其核心价值在于解决了"平滑去噪"与"边缘保留"这对矛盾------通过引入高斯函数的一阶导数,在抑制噪声的同时,最大程度保留图像边缘的细节信息,还创立了边缘检测计算理论,为后续边缘检测技术的发展奠定了理论基础。
二、最优边缘检测准则
Canny算法的核心优势源于其对"最优边缘检测"的定义与实现,具体包含三大准则,这也是理解算法设计逻辑的关键:
1. 最优检测准则
算法需尽可能多地标识出图像中的实际边缘,同时将漏检真实边缘的概率和误检非边缘(如噪声点)的概率降至最低。这一准则直接决定了算法的"完整性"------既要覆盖所有真实边缘,又要避免将噪声误判为边缘。例如,在工业质检场景中,若漏检零件表面的裂纹边缘,可能导致产品质量问题;若将表面污渍误判为裂纹,则会造成误检成本增加。
2. 最优定位准则
检测到的边缘点位置需与实际边缘点位置尽可能接近,即由噪声引起的边缘偏离真实位置的程度最小。该准则保障了边缘检测的"精度"。以医学影像中的肿瘤边缘检测为例,若检测到的边缘与肿瘤实际边缘偏差较大,会直接影响医生对肿瘤大小、形状的判断,进而影响诊疗方案制定。
3. 检测点与边缘点
算法检测到的边缘点与图像中的实际边缘点需形成一一对应关系,避免出现"一实多检"(一个真实边缘对应多个检测点)或"一多实检"(多个真实边缘对应一个检测点)的情况。这一准则确保了边缘的"连续性"与"唯一性",例如在交通场景中的车道线检测,若车道线边缘被检测为多条离散线段,会导致车道跟踪算法失效。
为满足上述准则,Canny采用变分法(一种寻找优化特定功能函数的数学方法),通过四个指数函数项近似实现最优检测,最终发现该最优检测过程与高斯函数的一阶导数高度吻合,这也成为后续算法步骤设计的理论依据。
三、核心算法步骤详解
Canny边缘检测算法通过5个紧密衔接的步骤实现,每个步骤均针对上述最优准则设计,环环相扣,共同完成从原始图像到边缘图像的转换。
1. 高斯滤波
1.1 原理与必要性
边缘检测本质是对图像灰度变化的捕捉,属于"锐化操作",但噪声会导致图像灰度出现无规律波动,干扰边缘判断。高斯滤波通过对原始图像与高斯核进行卷积运算,实现"平滑去噪"------将像素点周围的灰度值按高斯分布加权平均,距离越近的像素权重越大,从而在保留边缘趋势的同时,抑制孤立噪声点。
1.2 高斯核的定义与计算
高斯核(Gaussian Kernel)是一个对称的矩阵,其元素值由高斯函数计算得出,公式如下:
G ( x , y ) = 1 2 π σ 2 e − x 2 + y 2 2 σ 2 G(x,y)=\frac{1}{2\pi\sigma^2}e^{-\frac{x^2+y^2}{2\sigma^2}} G(x,y)=2πσ21e−2σ2x2+y2
其中, σ \sigma σ 为高斯函数的标准差,决定了滤波的平滑程度:
- σ \sigma σ 越小:高斯核的权重集中在中心像素,平滑效果弱,能保留更多细节,但去噪能力差;
- σ \sigma σ 越大:权重分布越分散,平滑效果强,去噪能力好,但会模糊边缘细节。
在实际应用中,常用的是5×5高斯核(兼顾去噪效果与边缘保留),其元素值已归一化(所有元素和为1,避免滤波后图像整体亮度变化),具体形式如下:
k e r n e l = 1 256 1 4 6 4 1 4 16 24 16 4 6 24 36 24 6 4 16 24 16 4 1 4 6 4 1 kernel =\frac{1}{256}\left\\begin{array}{ccccc}1 \& 4 \& 6 \& 4 \& 1 \\\\ 4 \& 16 \& 24 \& 16 \& 4 \\\\ 6 \& 24 \& 36 \& 24 \& 6 \\\\ 4 \& 16 \& 24 \& 16 \& 4 \\\\ 1 \& 4 \& 6 \& 4 \& 1\\end{array}\\right kernel=2561 1464141624164624362464162416414641
分母256是所有元素的和(1+4+6+4+1+4+16+...+1=256),确保卷积后像素值仍在0-255范围内。
1.3 卷积运算过程
假设原始图像为 I I I,高斯核为 K K K,滤波后的图像为 I ′ I' I′,则卷积运算公式为:
I ′ ( x , y ) = ∑ i = − 2 2 ∑ j = − 2 2 K ( i + 2 , j + 2 ) × I ( x + i , y + j ) I'(x,y)=\sum_{i=-2}^{2}\sum_{j=-2}^{2} K(i+2,j+2) \times I(x+i,y+j) I′(x,y)=i=−2∑2j=−2∑2K(i+2,j+2)×I(x+i,y+j)
即对于图像中每个像素 ( x , y ) (x,y) (x,y),取其周围5×5范围内的像素与高斯核对应元素相乘,再求和,结果作为滤波后该像素的灰度值。
1.4 难点标注
- 高斯核大小选择:核尺寸过小(如3×3)去噪不充分,过大(如7×7)会过度模糊边缘;需根据图像噪声强度调整,无通用标准,需通过实验验证。
- σ \sigma σ 值设定: σ \sigma σ 需与核大小匹配,例如5×5核对应的 σ \sigma σ 通常为1.4,若 σ \sigma σ 过大,核边缘元素权重过小,相当于"有效核大小"减小,浪费计算资源。
2. 计算图像梯度与方向
2.1 梯度的物理意义
图像梯度反映了灰度值的变化率,变化率越大,说明该位置越可能是边缘。梯度是一个矢量,包含梯度幅值 (变化率大小)和梯度方向(变化率最大的方向)------梯度方向始终垂直于边缘方向,这是后续步骤的核心依据。
2.2 Sobel算子:梯度计算的工具
Canny算法采用Sobel算子 计算梯度,该算子是一种离散微分算子,结合了高斯平滑与微分求导,抗噪声能力强,且能提供较精确的边缘方向信息。Sobel算子包含两个3×3核,分别用于计算水平方向( G x G_x Gx)和垂直方向( G y G_y Gy)的梯度:
- 水平方向Sobel核(检测垂直边缘):
s o b e l ( 水平方向 ) = − 1 0 1 − 2 0 2 − 1 0 1 sobel(水平方向 )=\left\\begin{array}{ccc}-1 \& 0 \& 1 \\\\ -2 \& 0 \& 2 \\\\ -1 \& 0 \& 1\\end{array}\\right sobel(水平方向)= −1−2−1000121
原理:通过左右像素的灰度差捕捉垂直方向的灰度变化(垂直边缘是水平方向的灰度突变)。 - 垂直方向Sobel核(检测水平边缘):
s o b e l ( 垂直方向 ) = − 1 − 2 − 1 0 0 0 1 2 1 sobel(垂直方向 )=\left\\begin{array}{ccc}-1 \& -2 \& -1 \\\\ 0 \& 0 \& 0 \\\\ 1 \& 2 \& 1\\end{array}\\right sobel(垂直方向)= −101−202−101
原理:通过上下像素的灰度差捕捉水平方向的灰度变化(水平边缘是垂直方向的灰度突变)。
2.3 梯度幅值与方向计算
-
梯度幅值( G G G) :综合 G x G_x Gx 和 G y G_y Gy 的结果,反映灰度变化的强度,有两种计算方式:
- 精确计算(欧几里得距离): G = G x 2 + G y 2 G=\sqrt{G_x^2+G_y^2} G=Gx2+Gy2
优点:精度高;缺点:涉及开方运算,计算量大。 - 近似计算(绝对值和): G = ∣ G x ∣ + ∣ G y ∣ G=|G_x|+|G_y| G=∣Gx∣+∣Gy∣
优点:计算速度快,避免浮点运算;缺点:精度略低。
在OpenCV中,默认采用近似计算,平衡精度与效率。
- 精确计算(欧几里得距离): G = G x 2 + G y 2 G=\sqrt{G_x^2+G_y^2} G=Gx2+Gy2
-
梯度方向( θ \theta θ) :通过反正切函数计算,公式为:
θ = arctan ( G y G x ) \theta=\arctan\left(\frac{G_y}{G_x}\right) θ=arctan(GxGy)计算结果的范围是 − 9 0 ∘ , 9 0 ∘ -90\^\\circ,90\^\\circ −90∘,90∘,需映射到 0 ∘ , 18 0 ∘ 0\^\\circ,180\^\\circ 0∘,180∘(边缘方向具有对称性, 0 ∘ 0^\circ 0∘ 与 18 0 ∘ 180^\circ 180∘ 方向一致)。
2.4 边缘方向分类
为后续非极大值抑制步骤做准备,需将梯度方向归为4个主要方向(与图像像素排列对齐),具体分类规则如下:
| 梯度方向范围 | 归类方向 | 对应边缘类型 |
|---|---|---|
| − 22. 5 ∘ ∼ 22. 5 ∘ -22.5^\circ\sim22.5^\circ −22.5∘∼22.5∘ 或 157. 5 ∘ ∼ 18 0 ∘ 157.5^\circ\sim180^\circ 157.5∘∼180∘ | 0 ∘ 0^\circ 0∘ | 水平边缘(梯度垂直于边缘) |
| 22. 5 ∘ ∼ 67. 5 ∘ 22.5^\circ\sim67.5^\circ 22.5∘∼67.5∘ 或 − 157. 5 ∘ ∼ − 112. 5 ∘ -157.5^\circ\sim-112.5^\circ −157.5∘∼−112.5∘ | 4 5 ∘ 45^\circ 45∘ | 4 5 ∘ 45^\circ 45∘ 边缘 |
| 67. 5 ∘ ∼ 112. 5 ∘ 67.5^\circ\sim112.5^\circ 67.5∘∼112.5∘ 或 − 112. 5 ∘ ∼ − 67. 5 ∘ -112.5^\circ\sim-67.5^\circ −112.5∘∼−67.5∘ | 9 0 ∘ 90^\circ 90∘ | 垂直边缘 |
| 112. 5 ∘ ∼ 157. 5 ∘ 112.5^\circ\sim157.5^\circ 112.5∘∼157.5∘ 或 − 67. 5 ∘ ∼ − 22. 5 ∘ -67.5^\circ\sim-22.5^\circ −67.5∘∼−22.5∘ | 13 5 ∘ 135^\circ 135∘ | 13 5 ∘ 135^\circ 135∘ 边缘 |
2.5 难点标注
- 梯度方向的近似误差:由于Sobel算子是离散核,计算出的梯度方向是近似值,尤其是在边缘灰度变化平缓的区域,可能导致方向归类错误,影响后续非极大值抑制效果。
- 零梯度处理:当 G x = 0 G_x=0 Gx=0 时, arctan \arctan arctan 函数会出现无穷大,需特殊处理(直接将梯度方向设为 9 0 ∘ 90^\circ 90∘ 或 − 9 0 ∘ -90^\circ −90∘)。
3. 非极大值抑制
3.1 原理与目标
经过高斯滤波和梯度计算后,得到的边缘通常是"粗边缘"(多个相邻像素均被判定为边缘),不符合"一一对应"准则。非极大值抑制(Non-Maximum Suppression, NMS)的目标是:在梯度方向上,仅保留梯度幅值最大的像素,将其他像素抑制为0,从而将粗边缘细化为单像素宽度的细边缘。
3.2 实现步骤
-
确定邻域像素 :根据当前像素 ( x , y ) (x,y) (x,y) 的梯度方向,确定其在梯度方向上的两个相邻像素(即沿边缘垂直方向的前后像素):
- 若梯度方向为 0 ∘ 0^\circ 0∘(水平边缘):邻域像素为 ( x − 1 , y ) (x-1,y) (x−1,y) 和 ( x + 1 , y ) (x+1,y) (x+1,y)(左右方向);
- 若梯度方向为 4 5 ∘ 45^\circ 45∘:邻域像素为 ( x − 1 , y + 1 ) (x-1,y+1) (x−1,y+1) 和 ( x + 1 , y − 1 ) (x+1,y-1) (x+1,y−1)(左上-右下方向);
- 若梯度方向为 9 0 ∘ 90^\circ 90∘(垂直边缘):邻域像素为 ( x , y − 1 ) (x,y-1) (x,y−1) 和 ( x , y + 1 ) (x,y+1) (x,y+1)(上下方向);
- 若梯度方向为 13 5 ∘ 135^\circ 135∘:邻域像素为 ( x − 1 , y − 1 ) (x-1,y-1) (x−1,y−1) 和 ( x + 1 , y + 1 ) (x+1,y+1) (x+1,y+1)(右上-左下方向)。
-
比较梯度幅值 :将当前像素的梯度幅值 G ( x , y ) G(x,y) G(x,y) 与两个邻域像素的梯度幅值比较:
- 若 G ( x , y ) G(x,y) G(x,y) 是三者中的最大值:保留该像素,灰度值不变;
- 否则:将该像素抑制为0(非边缘)。
3.3 插值处理
上述步骤仅适用于梯度方向为 0 ∘ 0^\circ 0∘、 4 5 ∘ 45^\circ 45∘、 9 0 ∘ 90^\circ 90∘、 13 5 ∘ 135^\circ 135∘ 的情况,但实际计算出的梯度方向可能是任意角度(如 1 5 ∘ 15^\circ 15∘、 3 0 ∘ 30^\circ 30∘ 等)。此时,邻域像素并非整数坐标,需通过单线性插值计算非整数坐标处的梯度幅值。
以梯度方向为 22. 5 ∘ ∼ 67. 5 ∘ 22.5^\circ\sim67.5^\circ 22.5∘∼67.5∘(非标准 4 5 ∘ 45^\circ 45∘)为例,假设当前像素为 C C C,梯度方向上的非整数坐标点为 d T m p 1 dTmp1 dTmp1 和 d T m p 2 dTmp2 dTmp2,周围整数坐标像素为 A 1 A1 A1、 A 2 A2 A2、 A 3 A3 A3、 A 4 A4 A4,插值计算步骤如下:
- 根据梯度方向与像素坐标的偏移量,计算 d T m p 1 dTmp1 dTmp1 到 A 1 A1 A1、 A 2 A2 A2 的距离权重;
- 通过加权平均计算 d T m p 1 dTmp1 dTmp1 的梯度幅值: d T m p 1 = w 1 × A 1 + ( 1 − w 1 ) × A 2 dTmp1 = w1 \times A1 + (1-w1) \times A2 dTmp1=w1×A1+(1−w1)×A2( w 1 w1 w1 为权重);
- 同理计算 d T m p 2 dTmp2 dTmp2 的梯度幅值: d T m p 2 = w 2 × A 3 + ( 1 − w 2 ) × A 4 dTmp2 = w2 \times A3 + (1-w2) \times A4 dTmp2=w2×A3+(1−w2)×A4;
- 将 C C C 的梯度幅值与 d T m p 1 dTmp1 dTmp1、 d T m p 2 dTmp2 dTmp2 比较,保留最大值。
3.4 难点标注
- 插值精度与计算量的平衡:插值越复杂(如双线性插值),精度越高,但计算量越大;单线性插值是工程上的折中选择,需理解其误差来源。
- 边缘断裂风险:若梯度方向归类错误,会导致邻域像素选择错误,进而抑制真实边缘像素,造成边缘断裂。
4. 双阈值筛选
4.1 原理与必要性
非极大值抑制后,图像中仍存在由噪声残留导致的"假边缘"(非真实边缘的像素)。双阈值筛选通过设定两个阈值(高阈值 T h i g h T_{high} Thigh 和低阈值 T l o w T_{low} Tlow),对边缘像素进行分类筛选,区分"确定边缘""候选边缘"和"非边缘"。
4.2 阈值设定原则
- 经验比例: T h i g h : T l o w = 2 : 1 ∼ 3 : 1 T_{high}:T_{low}=2:1\sim3:1 Thigh:Tlow=2:1∼3:1(如 T h i g h = 70 T_{high}=70 Thigh=70, T l o w = 30 T_{low}=30 Tlow=30);
- 影响:
- 阈值过高:会遗漏弱边缘(如模糊物体的边缘),导致边缘不完整;
- 阈值过低:会保留大量假边缘,影响后续处理。
4.3 筛选规则
- 强边缘(确定边缘):若像素梯度幅值 G > T h i g h G>T_{high} G>Thigh,则该像素是边缘,直接保留;
- 非边缘:若像素梯度幅值 G < T l o w G<T_{low} G<Tlow,则该像素不是边缘,直接抑制为0;
- 弱边缘(候选边缘):若 T l o w ≤ G ≤ T h i g h T_{low}\leq G\leq T_{high} Tlow≤G≤Thigh,则需进一步判断------若该像素与强边缘直接连通(邻域内有强边缘像素),则判定为边缘;否则,抑制为0。
4.4 滞后边界跟踪
弱边缘的判断需通过"滞后边界跟踪"实现:
- 遍历图像中所有强边缘像素,标记为"边缘";
- 以强边缘像素为起点,遍历其8邻域内的弱边缘像素,将这些弱边缘像素标记为"边缘";
- 重复步骤2,直到所有与强边缘连通的弱边缘都被标记;
- 未被标记的弱边缘像素(孤立弱边缘)抑制为0。
4.5 难点标注
- 阈值选择无通用标准:需根据图像的灰度分布、噪声强度调整,例如:
- 高对比度图像:可适当提高阈值,减少假边缘;
- 低对比度图像:需降低阈值,避免遗漏弱边缘;
- 连通性判断:8邻域连通(比4邻域连通)能保留更多连续边缘,但可能将相邻的假边缘误判为连通,需权衡。
5. 边缘输出
经过上述4个步骤后,最终得到的是二值图像------边缘像素灰度值为255(白色),非边缘像素灰度值为0(黑色),完成边缘检测的全部过程。
四、 Sobel算子
在Canny算法的梯度计算步骤中,Sobel算子是核心工具,其性能直接影响梯度计算的精度与抗噪声能力,需深入理解其特性与应用。
1. Sobel算子的定义与优势
Sobel算子是由Irwin Sobel于1968年在博士生课题讨论会上提出的离散微分算子,1973年通过专著脚注公开。其核心优势在于:
- 结合高斯平滑与微分:先通过加权平均实现平滑(抗噪声),再通过差分实现微分(捕捉梯度),兼顾去噪与边缘检测;
- 权重化设计:相邻像素对当前像素的影响随距离增大而减小(如水平Sobel核中,中间行的权重为-2、0、2,比上下行的-1、0、1更大),符合人眼对近邻像素更敏感的视觉特性;
- 计算效率高:采用3×3核,可通过快速卷积实现,适合实时处理。
2. Sobel算子的扩展
当使用3×3核计算梯度时,Sobel算子的方向精度有限。OpenCV提供了Scharr算子(aperture_size=-1时调用),是对3×3 Sobel算子的优化,其核权重更精确,方向检测误差更小,且计算速度与Sobel算子相同。
Scharr算子的核形式如下:
- 水平方向: − 3 0 3 − 10 0 10 − 3 0 3 \left\\begin{array}{ccc}-3 \& 0 \& 3 \\\\ -10 \& 0 \& 10 \\\\ -3 \& 0 \& 3\\end{array}\\right −3−10−30003103
- 垂直方向: − 3 − 10 − 3 0 0 0 3 10 3 \left\\begin{array}{ccc}-3 \& -10 \& -3 \\\\ 0 \& 0 \& 0 \\\\ 3 \& 10 \& 3\\end{array}\\right −303−10010−303
在需要高精度梯度方向的场景(如医学影像、工业质检),建议优先使用Scharr算子替代3×3 Sobel算子。
3. Sobel算子的局限性
- 无灰度自适应:未考虑图像灰度分布的差异,对灰度渐变的边缘检测效果较好,但对灰度突变的边缘(如黑白交界)可能出现过检测;
- 边缘定位精度有限:由于是离散核,梯度方向是近似值,可能导致边缘定位偏差,需结合非极大值抑制中的插值处理改善;
- 对噪声仍敏感:虽结合了高斯平滑,但对强噪声(如椒盐噪声)的抑制效果有限,需在高斯滤波前增加中值滤波等预处理步骤。
五、算法参数选择与优化建议
Canny算法的性能高度依赖参数设置,合理的参数能显著提升边缘检测效果,以下是关键参数的选择原则与优化建议:
1. 高斯核参数( σ \sigma σ 与核大小)
- σ \sigma σ 选择 :
- 噪声少的图像(如合成图像): σ = 0.8 ∼ 1.2 \sigma=0.8\sim1.2 σ=0.8∼1.2,核大小3×3或5×5;
- 噪声多的图像(如实拍图像): σ = 1.4 ∼ 2.0 \sigma=1.4\sim2.0 σ=1.4∼2.0,核大小5×5或7×7;
- 核大小选择 :核大小通常为 σ \sigma σ 的3-5倍(确保高斯函数的主要能量集中在核内),例如 σ = 1.4 \sigma=1.4 σ=1.4 对应5×5核。
2. 双阈值( T h i g h T_{high} Thigh 与 T l o w T_{low} Tlow)
- 经验法 :先计算图像梯度幅值的直方图,选择直方图中"峰值后的第一个谷值"作为 T h i g h T_{high} Thigh,再按2:1~3:1比例确定 T l o w T_{low} Tlow;
- 自适应法:通过Otsu算法自动计算阈值(适用于灰度分布均匀的图像);
- 手动调整:在工程应用中,可提供交互式界面,让用户根据实时预览结果调整阈值(如OpenCV的Canny函数演示工具)。
3. 边缘连通性判断
- 连通域选择:优先使用8邻域连通(比4邻域连通能保留更多连续边缘),但需注意:若图像中噪声较多,8邻域可能导致假边缘连通,此时可先进行形态学滤波(如膨胀、腐蚀)去除小噪声块。
4. 预处理与后处理优化
- 预处理 :若图像噪声严重,可在高斯滤波前增加中值滤波 (抑制椒盐噪声效果好)或双边滤波(保留边缘的同时去噪);
- 后处理 :边缘检测后,可通过形态学膨胀 (连接断裂的细小边缘)或腐蚀(去除孤立的小边缘点)优化边缘形态。
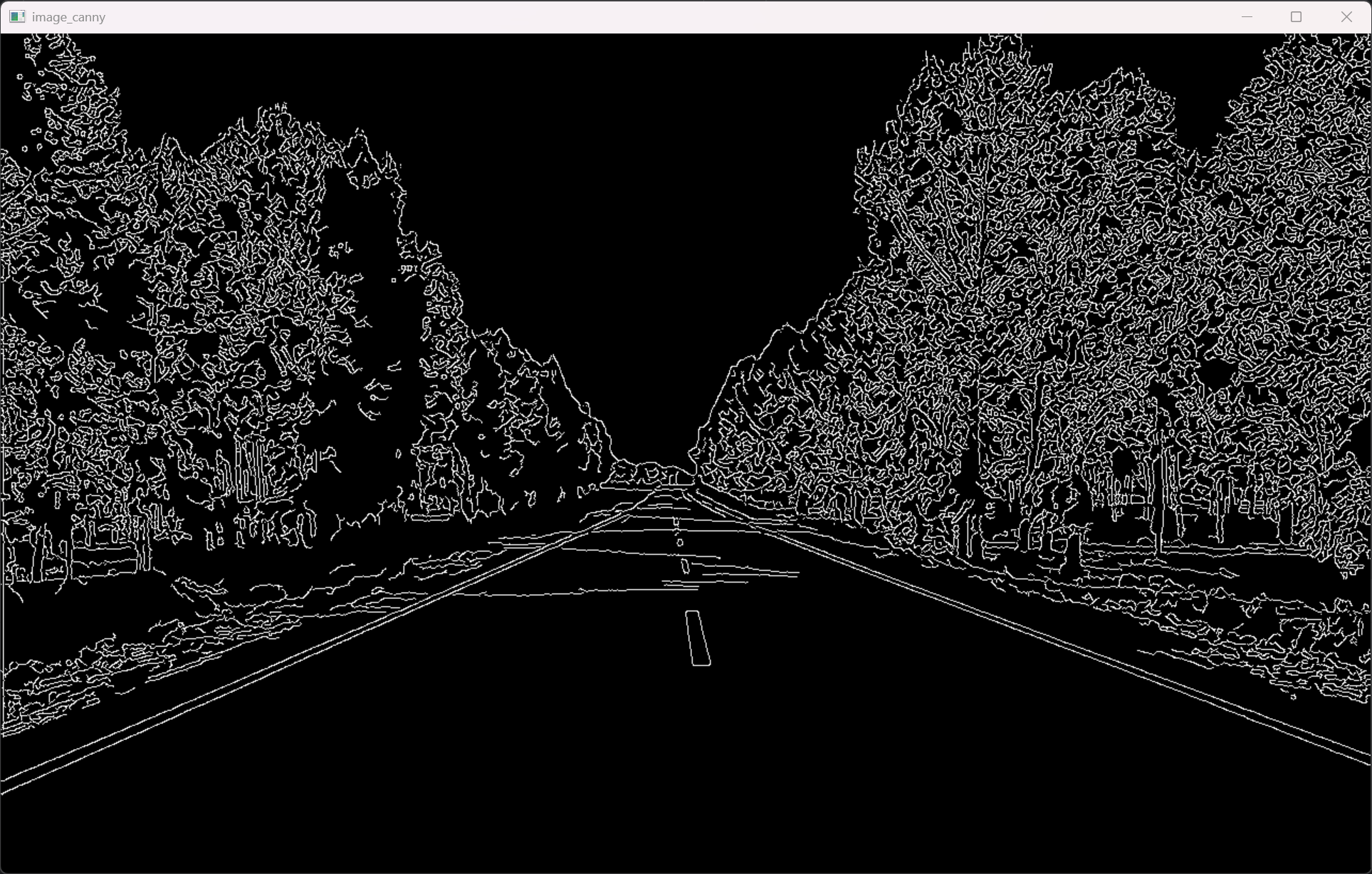
六、代码示例
python
#导入opencv库
import cv2
#1.读取图像
image_np = cv2.imread('./picture.png')
#2.灰度化图像
image_gray = cv2.cvtColor(image_np,cv2.COLOR_BGR2GRAY)
#3.高斯滤波
image_blur = cv2.GaussianBlur(image_np,(5,5),1.5)
#4.进行边缘检测
image_canny = cv2.Canny(image_blur,30,70)
#5.显示结果
cv2.imshow('image_np',image_np)
cv2.imshow('image_canny',image_canny)
cv2.waitKey(0)输出结果为:

七、常见问题与解决方案
在实际应用Canny算法时,常遇到边缘断裂、假边缘过多、边缘定位偏差等问题,以下是针对性的解决方案:
| 常见问题 | 原因分析 | 解决方案 |
|---|---|---|
| 边缘断裂 | 1. 阈值过高,弱边缘被抑制;2. 梯度方向归类错误;3. 噪声导致梯度幅值波动 | 1. 降低 T l o w T_{low} Tlow,扩大弱边缘范围;2. 使用Scharr算子提高梯度方向精度;3. 增加预处理(如双边滤波) |
| 假边缘过多 | 1. 阈值过低,噪声被误判为边缘;2. 高斯滤波不充分 | 1. 提高 T h i g h T_{high} Thigh,减少假边缘;2. 增大高斯核 σ \sigma σ 或核大小;3. 增加后处理(如面积滤波,去除小边缘块) |
| 边缘定位偏差 | 1. Sobel算子精度有限;2. 插值处理误差 | 1. 使用Scharr算子替代Sobel算子;2. 采用双线性插值替代单线性插值;3. 对边缘进行亚像素级优化(如基于二阶导数过零点) |
| 边缘过粗 | 非极大值抑制不彻底 | 1. 检查梯度方向归类是否正确;2. 确保插值处理正确实现;3. 增加形态学腐蚀步骤,细化边缘 |
八、算法应用场景与局限性
1. 典型应用场景
1.1 工业质检
- 应用:零件表面裂纹检测、尺寸测量(如机械零件的边缘定位);
- 优势:Canny算法能精确检测细小边缘,且抗噪声能力强,适合工业环境中的复杂图像。
1.2 医学影像
- 应用:CT影像中的器官边缘分割、眼底图像中的血管边缘检测;
- 优势:能保留弱边缘(如早期肿瘤的模糊边缘),且边缘定位精度高,为医学诊断提供准确依据。
1.3 自动驾驶
- 应用:车道线检测、障碍物边缘识别;
- 优势:实时性好(算法步骤简单,可硬件加速),且能处理不同光照条件下的图像(通过自适应阈值调整)。
1.4 图像配准
- 应用:遥感图像配准、全景图像拼接;
- 优势:边缘是图像的关键特征,Canny检测的边缘可作为配准的特征点,提高配准精度(如摘要5中提到的日冕图像配准,虽传统Canny效果有限,但改进版Canny仍有应用价值)。
2. 局限性
- 对纹理丰富的图像效果差:如草地、织物图像,纹理的灰度变化会被误判为边缘,导致边缘杂乱;
- 对光照变化敏感:同一物体在不同光照下的灰度分布不同,可能导致边缘检测结果不一致(需进行光照归一化预处理);
- 无法处理彩色图像直接检测:Canny算法仅适用于灰度图像,若处理彩色图像,需先将其转换为灰度图像(如通过RGB转YUV,取Y通道作为灰度值),或对每个颜色通道分别检测后融合结果。
九、总结与展望
Canny边缘检测算法凭借其"最优边缘检测"的理论基础、清晰的步骤设计和优异的实践性能,成为计算机视觉领域的经典算法。其核心价值在于:通过高斯滤波、梯度计算、非极大值抑制、双阈值筛选的有机结合,在去噪与边缘保留之间取得了平衡,为后续高级视觉任务提供了高质量的边缘特征。
Canny算法的发展方向主要包括:
- 自适应参数优化:结合深度学习(如卷积神经网络),自动学习不同场景下的高斯核参数、双阈值等,减少人工干预;
- 多尺度边缘检测 :通过多尺度高斯核(不同 σ \sigma σ)检测不同大小的边缘,再融合多尺度结果,提高边缘的完整性;
- 彩色图像直接检测:设计适用于彩色图像的Canny变体,利用颜色通道间的相关性,提升边缘检测的准确性;
- 实时硬件加速:针对嵌入式设备(如自动驾驶中的车载芯片),通过FPGA、GPU加速Canny算法的卷积、插值等计算密集型步骤,满足实时性要求。