1、安装
sudo apt install ros-humble-ros-gz -y2、查看版本
ign gazebo --version
3、测试一下
ros2 launch ros_gz_sim gz_sim.launch.py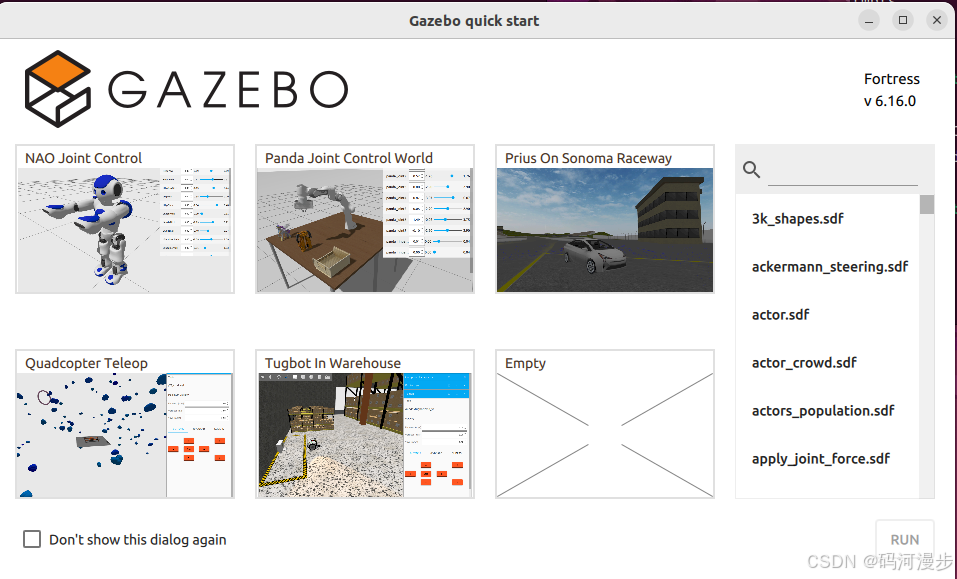
4、执行以下命令
ros2 launch ros_gz_sim gz_sim.launch.py gz_args:="-v 4 -r visualize_lidar.sdf"5、如果是在虚拟机上,会出现GUI无响应,然后过一会出现界面,但是界面在闪烁,这是由于硬件加速有限导致的。为了解决这个问题,可以通过执行以下命令强制使用软件渲染
echo 'export LIBGL_ALWAYS_SOFTWARE=true' >> ~/.bashrc
source ~/.bashrc
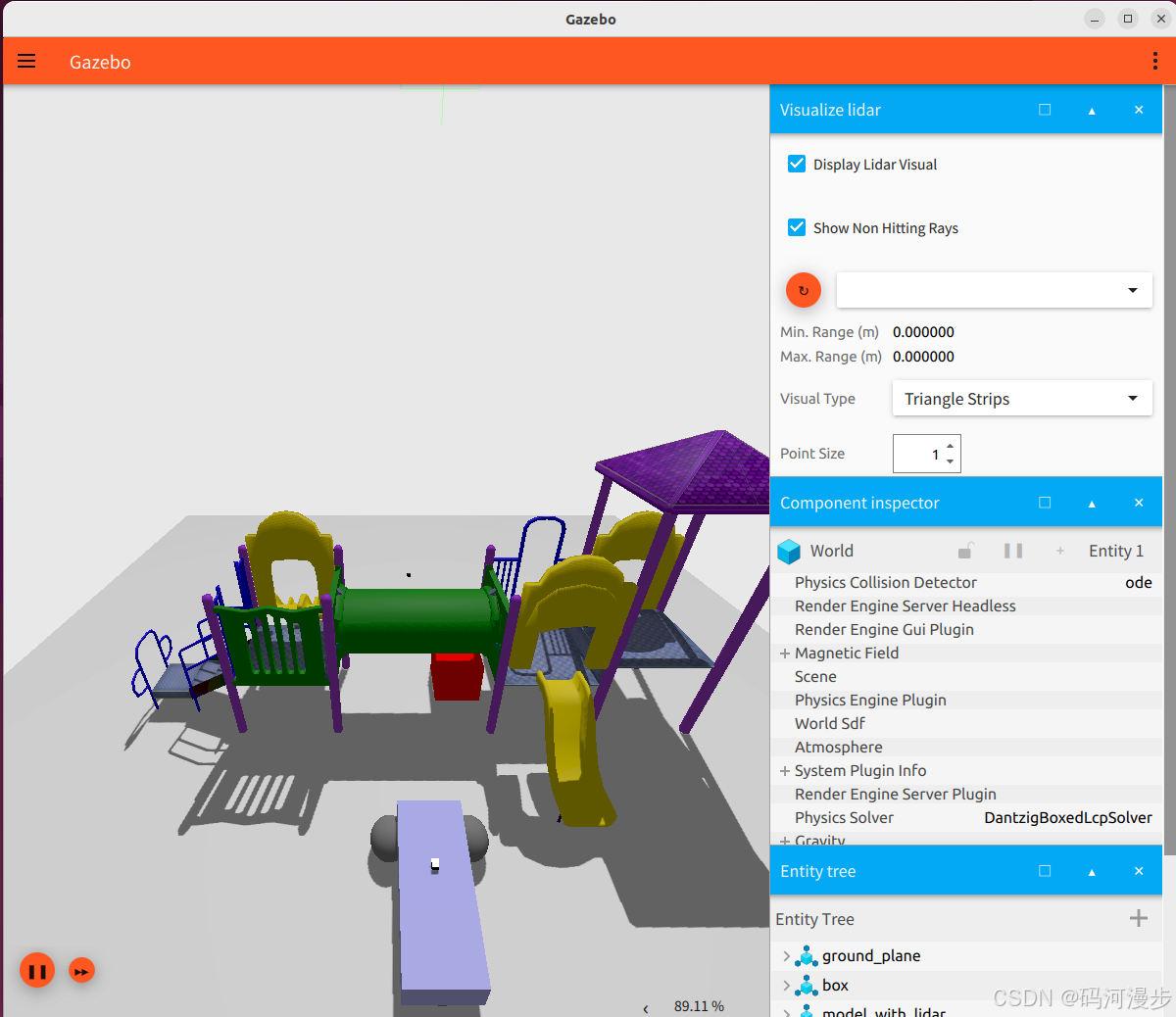
6、重新执行步骤4的命令,可以看到demo
7、安装一下IgnitionSystem插件
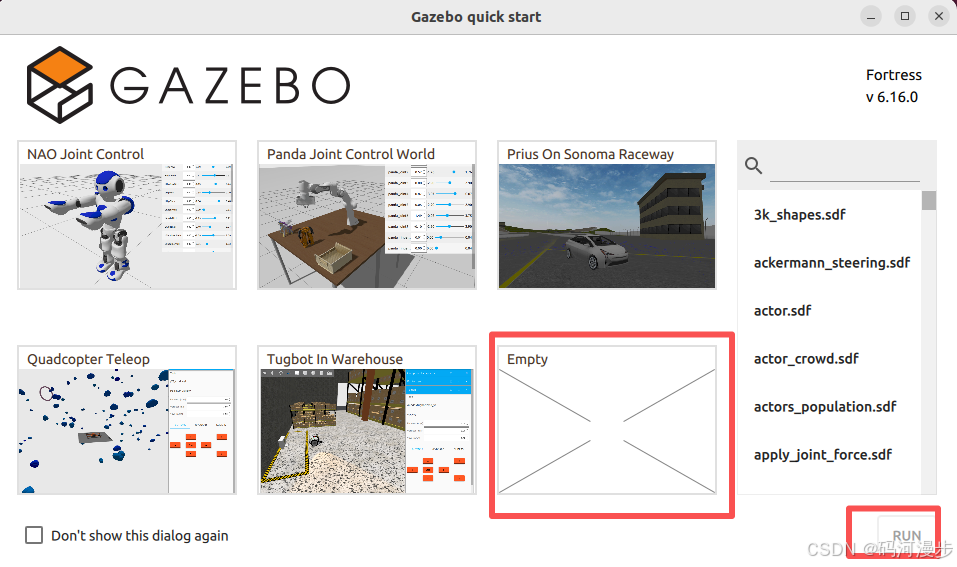
sudo apt install ros-humble-ign-ros2-control -y8、重新执行步骤3的命令,然后选择空的,运行点下右下角的RUN
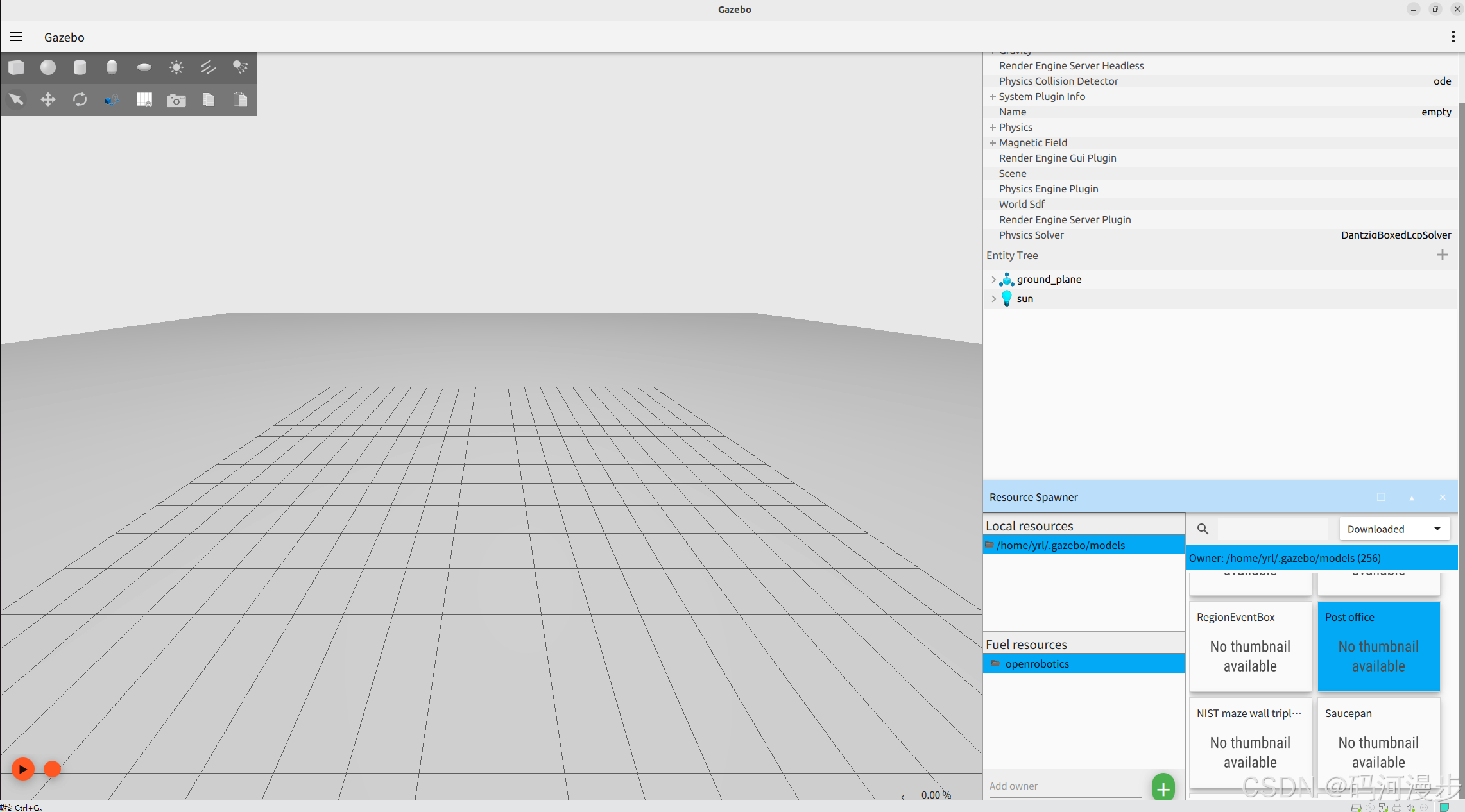
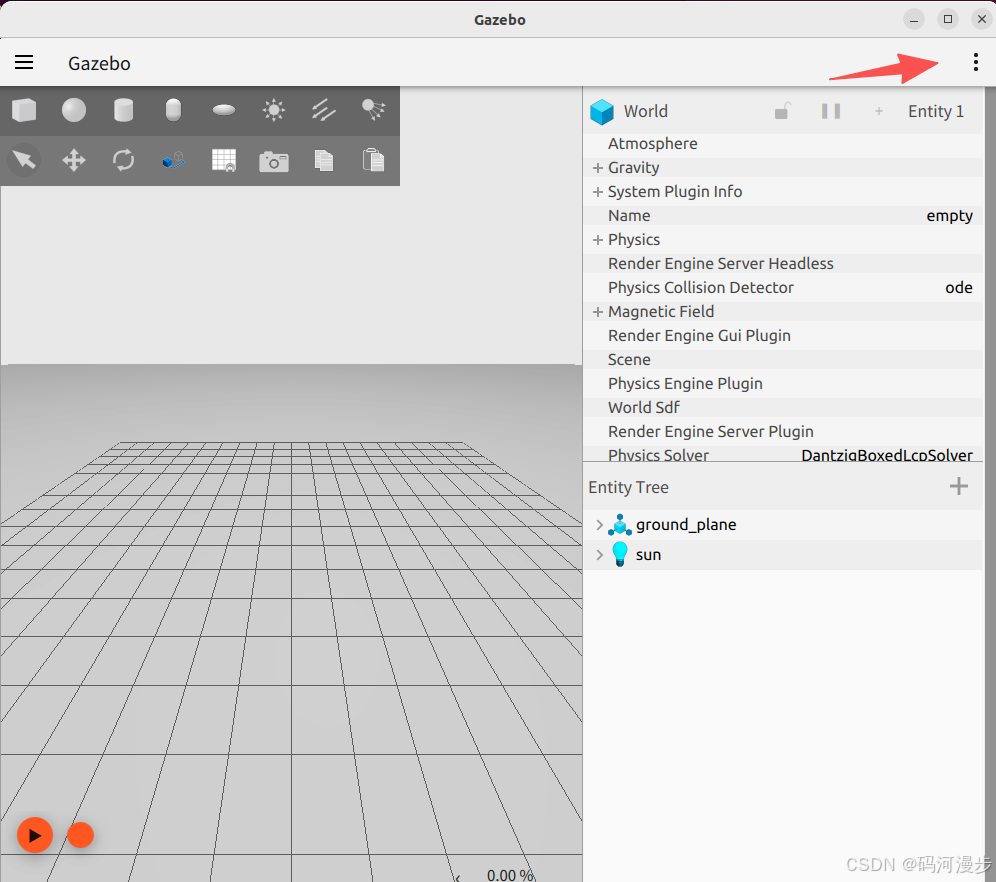
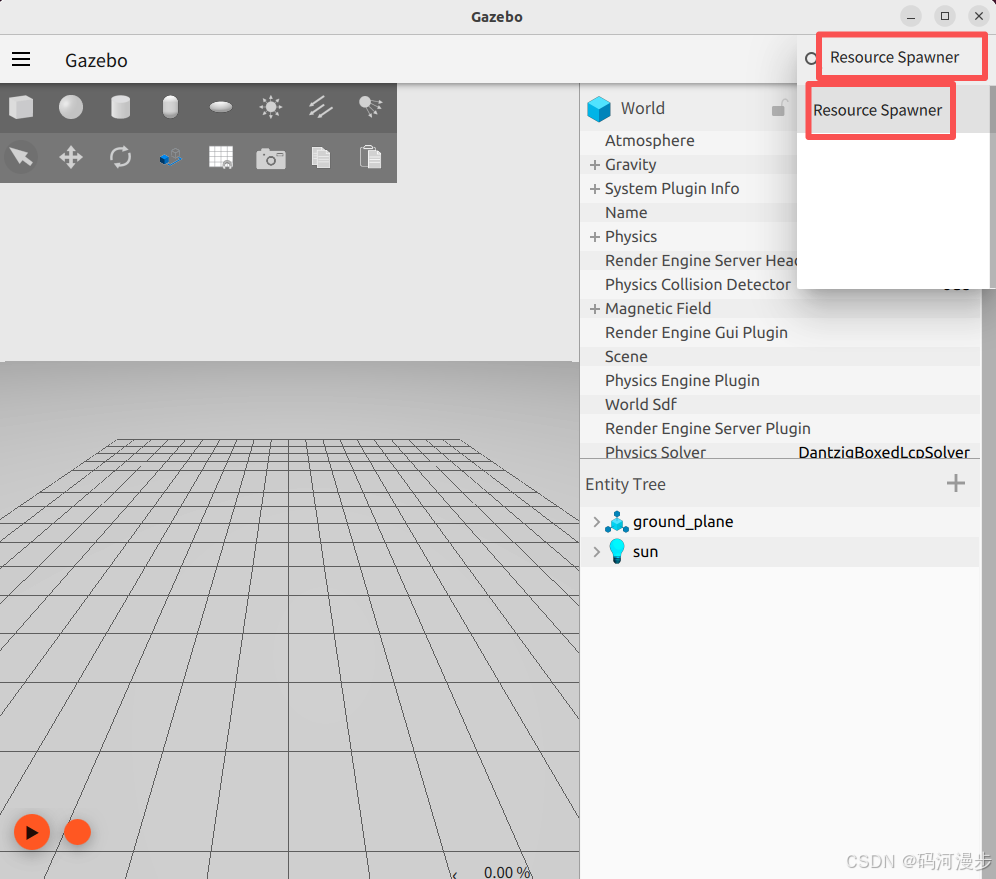
9、点开右上角,搜索Resource Spawner,现在模型是空的

10、下载一下模型
mkdir -p ~/.gazebo
cd ~/.gazebo
sudo apt install git -y
git clone https://gitee.com/ohhuo/gazebo_models.git ~/.gazebo/models11、这里挺多模型的,重新进入一下,可以显示出来