在自动驾驶的"大脑"------规划模块中,始终存在一个核心难题:道路交通的瞬息万变,让同一行驶场景下的未来充满多种合理可能。传统规划方法要么被预设的"锚点轨迹"束缚手脚,要么在筛选最优路径时浪费大量有效信息。而近期引发关注的Map-World方法,用"完形填空"式规划与"路径积分"世界模型的组合拳,打破了这一僵局,为多模态规划带来了颠覆性思路。
一、自动驾驶规划的"Anchor困境":被框住的未来
要理解Map-World的革新性,首先得看清传统规划方法的瓶颈。当前主流的自动驾驶规划,大多跳不出"生成再挑选"的套路:模型先预测出多条可能的轨迹,再通过某种策略筛选出一条"最优解"执行。这种模式往往依赖两类核心支撑,却都暗藏隐患。
一类是"Anchor-based(锚点)"方法。工程师会预先手工设计或从数据中聚类出一组典型轨迹(比如直行、左转、跟车等),让模型像做选择题一样从中挑选或微调。但锚点本质上是对连续行驶空间的"离散切割",许多精细的驾驶行为(比如拥堵时的小幅避让、环岛内的平滑走线)可能恰好"落在锚点之间",导致规划结果看似合规,却完全不符合人类驾驶习惯,甚至与历史行驶轨迹脱节。更麻烦的是,锚点的匹配和筛选会增加系统延迟,即便像DiffusionDrive这样的先进方法减少了锚点数量,仍摆脱不了锚点集合的表达局限。
另一类是世界模型规划方法。这类方法通过预测未来场景辅助决策,比如先生成未来鸟瞰图(BEV)再回归轨迹,或用世界模型给轨迹候选打分。但它们同样遵循"选一个最优解"的逻辑,大量预测出的多模态信息被直接丢弃,而训练轨迹选择器又需要引入强化学习等复杂机制,增加了系统的不稳定性。
核心矛盾已然清晰:如何不依赖预设锚点,让规划直接产出多样且连贯的轨迹?如何充分利用所有预测信息,而非浪费大部分多模态价值?Map-World给出了自己的答案。
二、核心革新:从"选择题"到"填空题"的规划
Map-World的突破源于两个核心设计:Masked Action Planning(MAP,掩膜动作规划)解决了"无锚点生成多模态轨迹"的问题,路径积分世界模型则解决了"多模态信息高效利用"的难题。
1. Masked Action Planning:像GPT一样"填空"未来
MAP的核心思路极其简洁:把未来轨迹规划变成一道"完形填空题"。已行驶的历史轨迹是已知的"前文",未来几秒要走的航路点(Waypoints)则是需要填充的"空格",用mask token占位表示。同时,引入由导航地图和车辆状态推断出的"意图路径"作为提示,就像作文提纲一样,为模型划定未来的大致走向。
这个过程堪比自动驾驶界的GPT完形填空:历史轨迹提供上下文逻辑,意图路径明确核心方向,模型基于Transformer强大的序列建模能力,"补全"出符合场景的未来轨迹。更关键的是,通过在潜在空间中注入随机扰动,模型能生成多条"风格迥异但逻辑自洽"的轨迹------就像相同的开头能延伸出不同结局的故事,这些轨迹共享历史和意图约束,却在微观策略上各有不同。
在技术实现上,MAP借鉴了BERT的掩码解码结构:历史轨迹经编码器提取特征后,与未来的mask token一同输入解码器,解码器融合BEV场景特征、行人车辆等动态信息,通过交叉注意力确保轨迹既符合道路几何约束,又能避让障碍。最终输出的每条轨迹,都是在意图路径基础上的细化偏移------比如同样是左转意图,可能对应"提前并线"或"原地等待"两种策略,模型还会为每条轨迹输出概率评分,标识其合理性。
这种"填空式"规划彻底摆脱了锚点依赖:无需预设轨迹模板,模型仅凭数据学习到的驾驶逻辑,就能生成连贯、平滑且符合历史上下文的多模态轨迹。
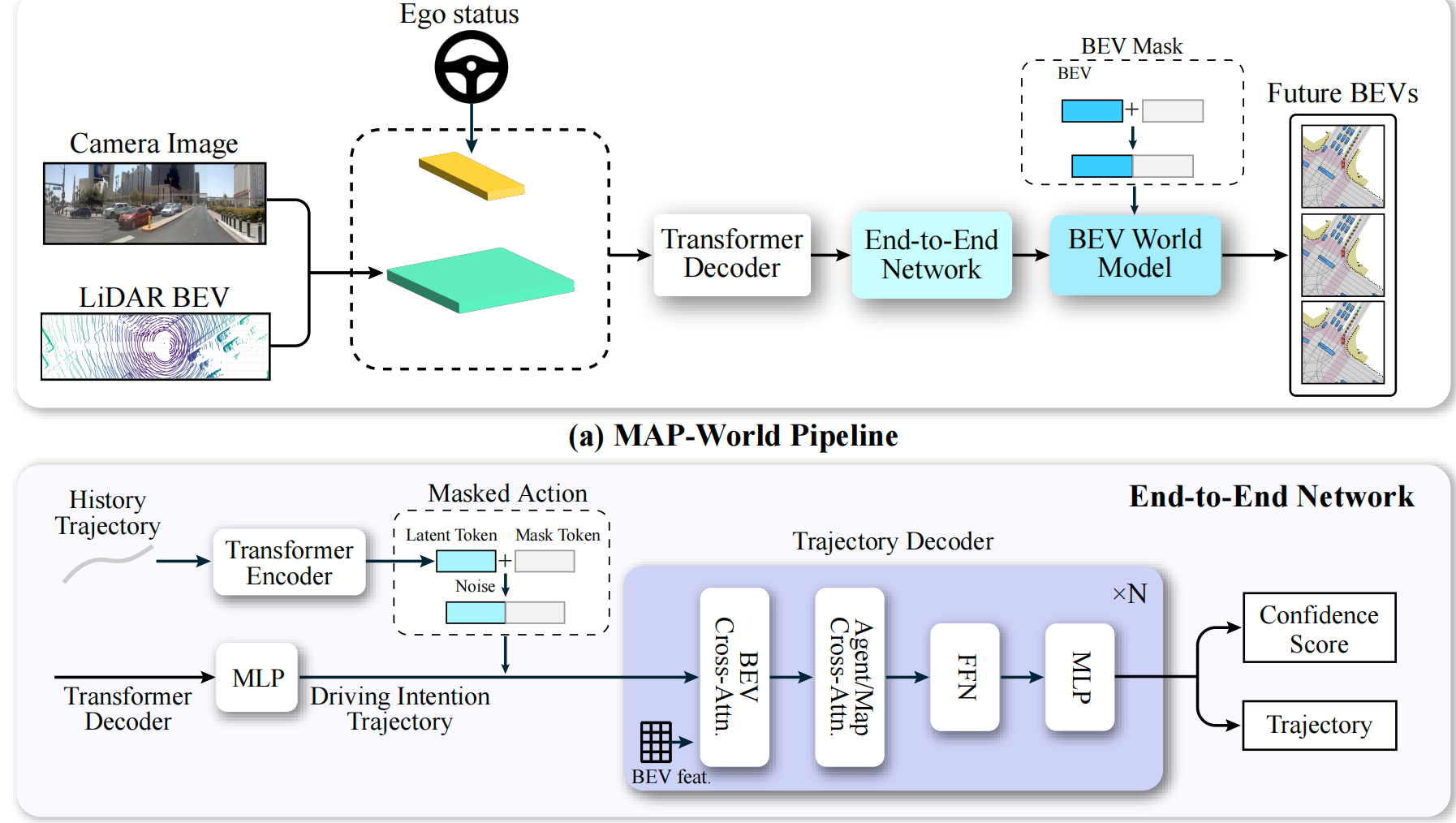 MAP-World概述。(a) 多视角图像与激光雷达数据经编码处理,获取当前BEV特征。编码后的本车状态与BEV特征融合,形成当前状态表示。(b) 掩码动作规划通过将Transformer解码器应用于当前状态表示,生成多模态轨迹。(c) 基于多模态轨迹与当前BEV特征,BEV世界模型合成未来BEV特征,通过与BEV语义图的损失函数进行训练,并在路径积分框架下进行评估。
MAP-World概述。(a) 多视角图像与激光雷达数据经编码处理,获取当前BEV特征。编码后的本车状态与BEV特征融合,形成当前状态表示。(b) 掩码动作规划通过将Transformer解码器应用于当前状态表示,生成多模态轨迹。(c) 基于多模态轨迹与当前BEV特征,BEV世界模型合成未来BEV特征,通过与BEV语义图的损失函数进行训练,并在路径积分框架下进行评估。
2. 路径积分世界模型:多路径的"量子叠加"学习
如果说MAP解决了"生成多样轨迹"的问题,路径积分世界模型则解决了"如何用好这些轨迹"的关键。它借鉴量子物理中的费曼路径积分思想,将所有候选轨迹视为"量子叠加态"------每条轨迹都有其贡献权重,最终的模型学习目标是所有路径的"加权叠加结果",而非仅聚焦某一条"最优轨迹"。
具体来说,MAP生成多条候选轨迹后,轻量级世界模型会为每条轨迹模拟"行驶后的未来场景":预测车辆沿该轨迹行驶时,未来几秒的BEV语义图、障碍物位置等。随后,将每条轨迹的预测结果与真实未来场景对比,计算语义误差;最后,以每条轨迹的概率评分为权重,对所有误差进行加权求和,得到最终的训练损失。这个过程用公式可表示为:
𝐿 = ∑ 𝑝 𝐿(𝜏)
其中𝜏是第k条候选轨迹,𝑝是其概率,𝐿是语义预测损失。这种离散形式的"路径积分",让模型从所有可能的未来中学习,而非仅依赖单条轨迹的反馈。
这种设计带来两大优势:一是避免信息浪费,次优轨迹的价值被充分利用,模型对罕见场景的适应能力大幅提升;二是保持端到端可微,无需额外训练强化学习选择器,简化了训练流程,降低了梯度方差带来的不稳定性。
三、"三无"新范式:无锚点、无RL、无教师的极简主义
结合MAP与路径积分世界模型,Map-World形成了"三无"规划范式,彻底打破了传统方法的依赖枷锁。
-
无锚点:摒弃预定义轨迹库,通过掩膜建模和潜变量采样生成任意形状的轨迹,覆盖锚点库无法触及的罕见场景(如非常规绕障)。同时移除锚点匹配环节,降低系统延迟,提升推理效率。
-
无强化学习:全程基于监督学习和可微损失优化,无需设计复杂奖励函数或进行大量模拟试验。即便没有RL加持,其闭环测试性能仍超过许多RL-based方法,证明了路径积分训练的有效性。
-
无教师策略:无需外部专家(如规则规划器)提供指导,多模态轨迹的生成与评价完全由模型自主完成。监督信号直接来自语义真值和轨迹真值,模型通过自我调整轨迹概率权重,逐渐学到安全合理的驾驶逻辑。
这种"无先验、纯数据驱动"的框架,让模型在"全局"数据分布上优化,而非围绕人工设计的轨迹打转,稳定性和泛化性显著提升。
四、实验硬实力:NAVSIM与nuScenes上的全面领先
创新的价值最终需要实验数据验证。Map-World在NAVSIM(闭环非交互模拟)和nuScenes(开放环路评测)两大基准上,都展现了超越主流方法的性能。
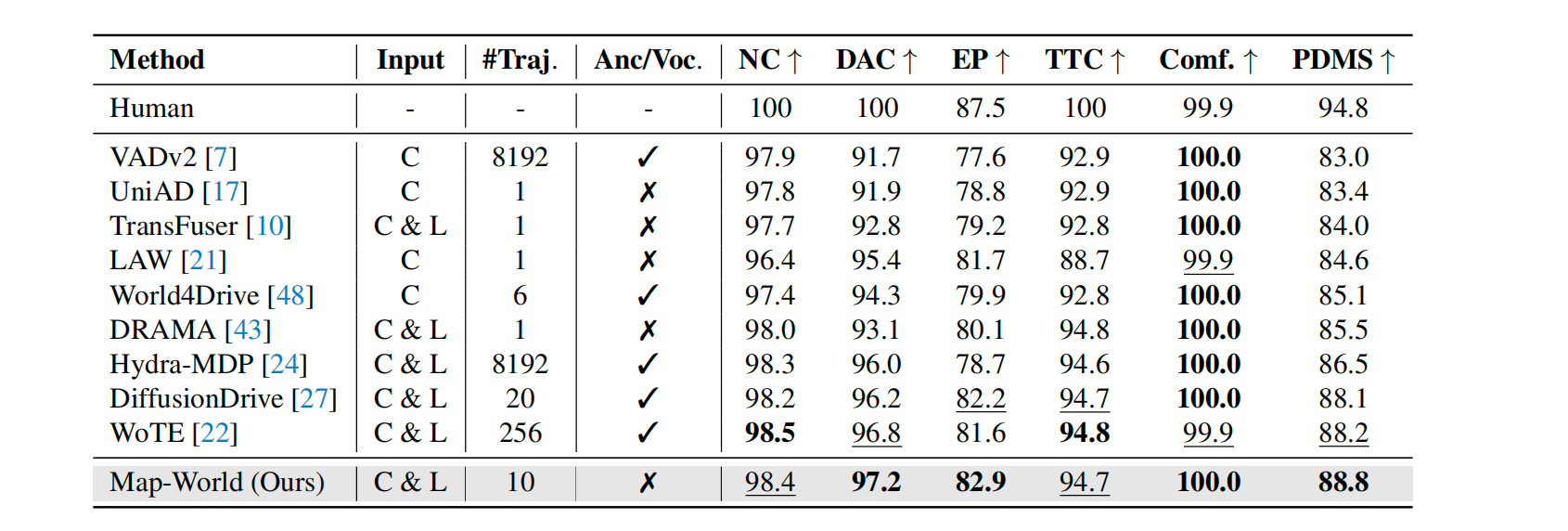
在NAVSIM测试中,核心指标PDMS(预测驾驶员模型分,综合安全、合规、舒适等维度)达到88.8分,不仅超过Hydra-MDP(86.5)、DiffusionDrive(88.1)等锚点方法,还优于World4Drive(88.2)等RL-based方法。更严格的EPDMS指标(增加红绿灯遵守、车道保持等约束)中,其85.0分的成绩同样领先DiffusionDrive(84.3)。值得注意的是,Map-World仅用10条轨迹候选就实现这一成绩,而Hydra-MDP等锚点方法需用到上千条锚轨迹,效率优势悬殊。
在最高难度场景下,Map-World的平均轨迹误差控制在0.81米以内,三档难度平均仅0.50米,远低于早期方法ST-P3的2米量级;碰撞率低至0.07%,在同类方法中名列前茅。
nuScenes数据集上,Map-World在L2误差和碰撞率上优于DiffusionDrive等方法,且仅用10条候选轨迹(DiffusionDrive用20条锚轨迹)。推理延迟方面,其13.5ms的成绩也比WoTE的18.7ms更具实时性优势------这对自动驾驶这类毫秒级响应需求的场景至关重要。
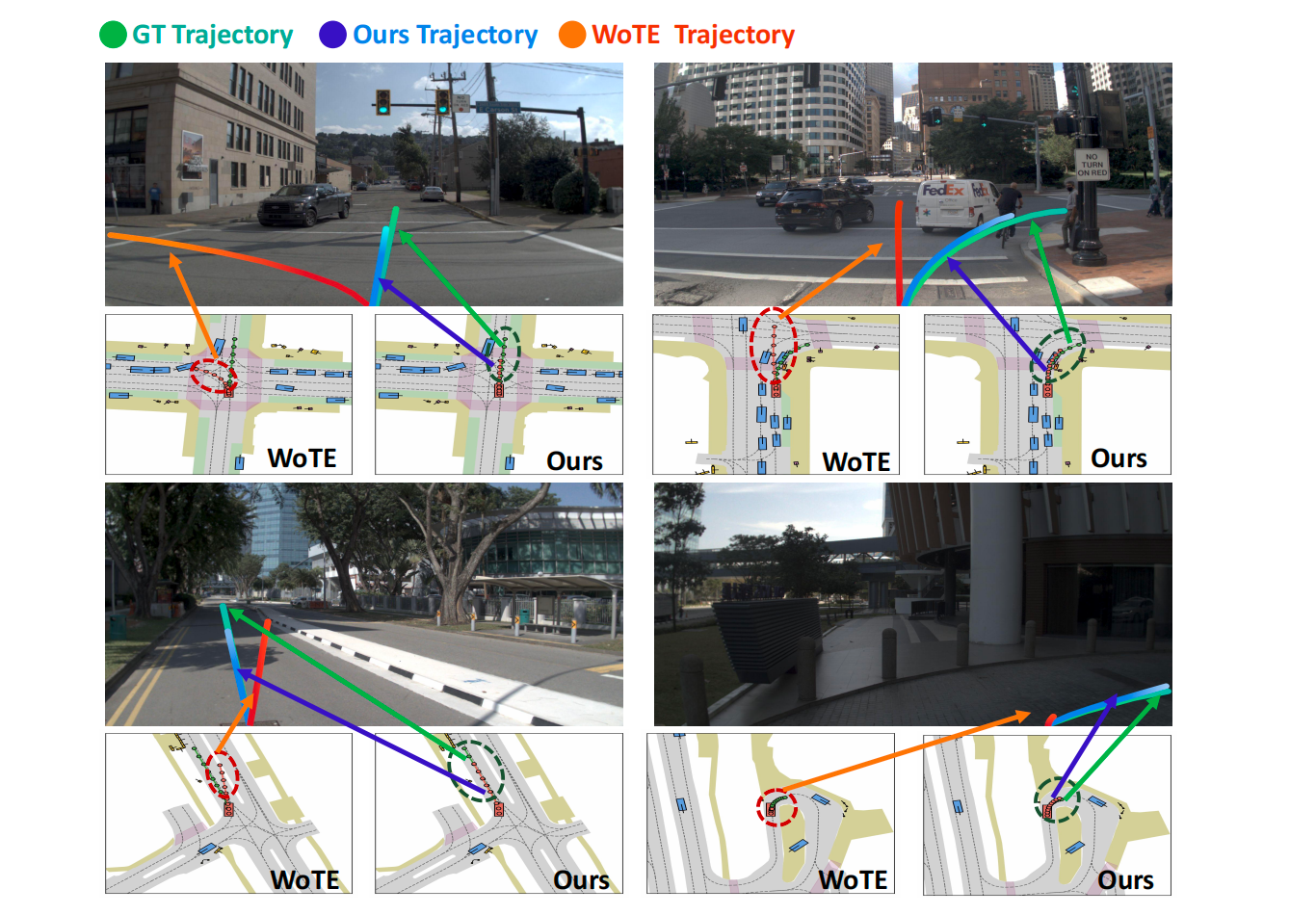
可视化结果更直观:在复杂右转场景中,WoTE等方法的轨迹易偏离人类驾驶习惯,而Map-World的轨迹能紧密贴合真实行驶路径;直行穿路口、左转超车等场景中,其轨迹更平滑、安全。
五、从顶会到量产:Map-World的落地"拦路虎"
尽管Map-World在学术实验中表现惊艳,但自动驾驶技术的终极考验在于量产落地。从"服务器上的13.5ms"到"车载芯片的稳定输出",从"实验室的高指标"到"道路上的绝对安全",Map-World面临着算力与延迟、安全与确定性两大核心矛盾,具体可拆解为四大工程挑战。
1. 算力与实时性:车载芯片上的"性能缩水"陷阱
论文中13.5ms的推理延迟,是基于NVIDIA A100这类服务器级GPU实现的------这与车载场景的硬件环境存在天壤之别,构成了最直接的落地瓶颈。
首先是硬件算力鸿沟。车载主流芯片如Orin-X、Thor的算力虽在持续提升,但与A100相比仍有数量级差距,且车载芯片需同时承载感知、定位、融合、控制等多任务,留给规划模块的算力资源极其有限。在服务器上表现优异的13ms,移植到车载芯片后可能飙升至50ms甚至100ms,而高速自动驾驶的规划控制周期通常要求在100ms以内,城市道路则更苛刻,延迟超标会直接导致车辆响应滞后,引发安全风险。
其次是模型架构的车载适配难题。Map-World的核心MAP模块依赖Transformer,其自注意力机制的计算量随序列长度平方增长;世界模型若参与在线推理,生成高维BEV语义特征的开销更是巨大。如何通过模型量化、剪枝、蒸馏等技术,将庞大的网络压缩到嵌入式芯片可承受的范围,同时不丢失多模态轨迹的生成质量------比如既保证轨迹多样性,又不出现形状畸变------是工程团队需要攻克的核心课题。
2. 生成式"黑盒":车企最忌惮的不可控性
Map-World的"填空式"生成逻辑,与传统锚点方法的"规则化"逻辑存在本质差异,这种"黑盒"特性成为汽车安全领域的一大阻碍。
传统锚点方法中,工程师可预先定义候选轨迹的形态,轻松设置"绝对不能压实线""转弯半径不小于5米"等硬约束,轨迹的可控性极强。而Map-World像GPT写诗一样生成轨迹,虽多数时候符合逻辑,但偶尔会出现"轨迹幻觉":比如生成一条突然冲向路沿、违反车辆物理极限的怪异路径。这种不可控性,在追求"零意外"的汽车行业难以被接受。
更棘手的是Bad Case修复难题。若传统方法在某路口出现"右转过急"的问题,工程师可直接调整锚点参数或权重快速修复;但Map-World的轨迹是神经网络"自主填空"的结果,无法通过简单修改代码干预------要修复问题,只能投喂更多相关场景数据重新训练模型,这种"牵一发而动全身"的调试方式,效率极低且难以保证效果,与汽车行业快速迭代的需求相悖。
3. 安全兜底:不能丢的"规则枷锁"
没有任何一家车企敢将神经网络输出的轨迹坐标直接发给底盘控制。去掉锚点后,Map-World的轨迹点序列必须经过严格的安全兜底层(Safety Layer)验证,而这层验证的设计难度远超传统方法。
一方面是运动学与动力学验证。传统锚点由五次多项式等数学方法生成,天然保证轨迹连续、速度与加速度平滑,符合车辆物理特性;而Map-World生成的轨迹可能出现"要求车辆横移""转向角速度超标"等动力学违规情况,安全层需实时校验每条轨迹的运动学合法性,计算开销巨大。
另一方面是碰撞检测的高要求。Map-World生成的多模态轨迹形状各异,不像锚点那样规范,后端需对每条轨迹进行实时碰撞检测。若为确保绝对安全,设计一套极其严格的规则过滤器------比如强制将轨迹修正为接近锚点的形态------那么Map-World"无束缚、高灵活"的核心优势将被彻底削弱,最终表现可能退化到传统方法水平。
4. 长尾场景:数据驱动的"认知盲区"
Map-World是完全数据驱动的模型,其性能上限完全取决于训练数据的质量与覆盖度,这在长尾场景下暴露出明显短板。
首先是数据偏见问题。若训练数据中包含人类抢行、压线等不良驾驶习惯,模型会"照单全收";而要从海量数据中清洗掉不良行为,同时保留合理的驾驶多样性,是一项耗时耗力的工程。
更关键的是未见过的场景"做不对"。面对训练集中未出现的极端情况------如前方卡车掉落货物、道路出现异形路障等分布外场景(OOD),基于锚点的方法可通过几何规则触发紧急刹车、沿车道线坚守等保底策略;而Map-World因没见过这类"上文",可能会"填空"出离谱的轨迹,比如直接冲向障碍物,这在安全层面是无法接受的。
破局思路:融合而非替代
当前行业的共识是,Map-World的落地并非"完全替代传统方法",而是"优势互补"。可行的路径是:将Map-World作为上层高级博弈规划器,利用其多模态生成能力输出符合人类驾驶习惯的意图与粗略轨迹;下游保留基于模型预测控制(MPC)等传统方法的控制层,强制约束车辆动力学、碰撞安全等核心指标。通过这种"生成+约束"的融合架构,在拟人化灵活性与绝对安全之间找到平衡。
六、行业启示:从"火车变轨"到"越野车驾驶"的进化
Map-World的突破,不仅是学术上的创新,更对自动驾驶工业界具有深刻启发。要理解其价值,不妨对比传统Anchor方法与Map-World的核心差异:
传统Anchor方法(百度Apollo的Lattice Planner、Waymo的MultiPath、特斯拉早期Autopilot等)像"火车变轨"------铁轨(锚点)预先铺好,符合物理规律,AI只需选对轨道。优点是安全兜底能力强,绝不出轨;缺点是灵活度差,遇到无车道线等"无轨道"场景就束手无策。目前95%以上的量产系统,为了通过ISO 26262等法规认证,仍依赖这种方法兜底。
Map-World则像"越野车自由驾驶"------无预设轨道,AI根据场景自主决策。优点是极度灵活,能应对城中村博弈、无保护左转等长尾场景;缺点是对模型控制力和数据量要求极高,需避免"蛇形走位"等危险输出。
这种差异决定了当前的行业应用格局:Map-World这类生成式规划,已成为华为、小鹏等头部企业预研重点,用于解决Anchor覆盖不到的难题,但通常会加一层"运动学校验"确保安全后才上车。它带来的三大启示尤为关键:
-
泛化优先:无锚点设计让系统更适应不同城市、不同国家的驾驶习惯,减少场景适配成本,契合特斯拉FSD等通用智驾系统的发展方向。
-
效率简化:端到端融合规划与世界模型,减少模块接口和故障点,让整体优化成为可能,符合工业界"全栈自研、闭环迭代"的趋势。
-
安全冗余:多模态轨迹的高质量特性,让系统拥有"Plan B",主轨迹失效时可快速切换备选方案,提升鲁棒性。
七、结语:未来还需要Anchor吗?
Map-World用"填空"与"路径积分"的创新,为自动驾驶规划打开了"无锚点"的新大门,证明了生成式方法的巨大潜力。但从顶会论文到量产上车,它仍需跨越算力、安全、数据等多重工程鸿沟。
未来的主流方案,或许不会是"完全抛弃Anchor",而是"Anchor为骨,生成式为魂":用Anchor构建安全底线,用Map-World这类生成式模型提升轨迹的拟人化与灵活性。这种融合范式,既符合汽车行业对安全的严苛要求,又能充分发挥AI的创新价值。
你认为未来主流自动驾驶系统还需要依赖预设的Anchor轨迹库吗?欢迎在评论区分享你的看法,一起探讨智驾规划的演进之路。