视频讲解:Mujoco 机械臂 OMPL 进行 RRT 关节空间路径规划避障、绕障_哔哩哔哩_bilibili
代码仓库:https://github.com/LitchiCheng/mujoco-learning
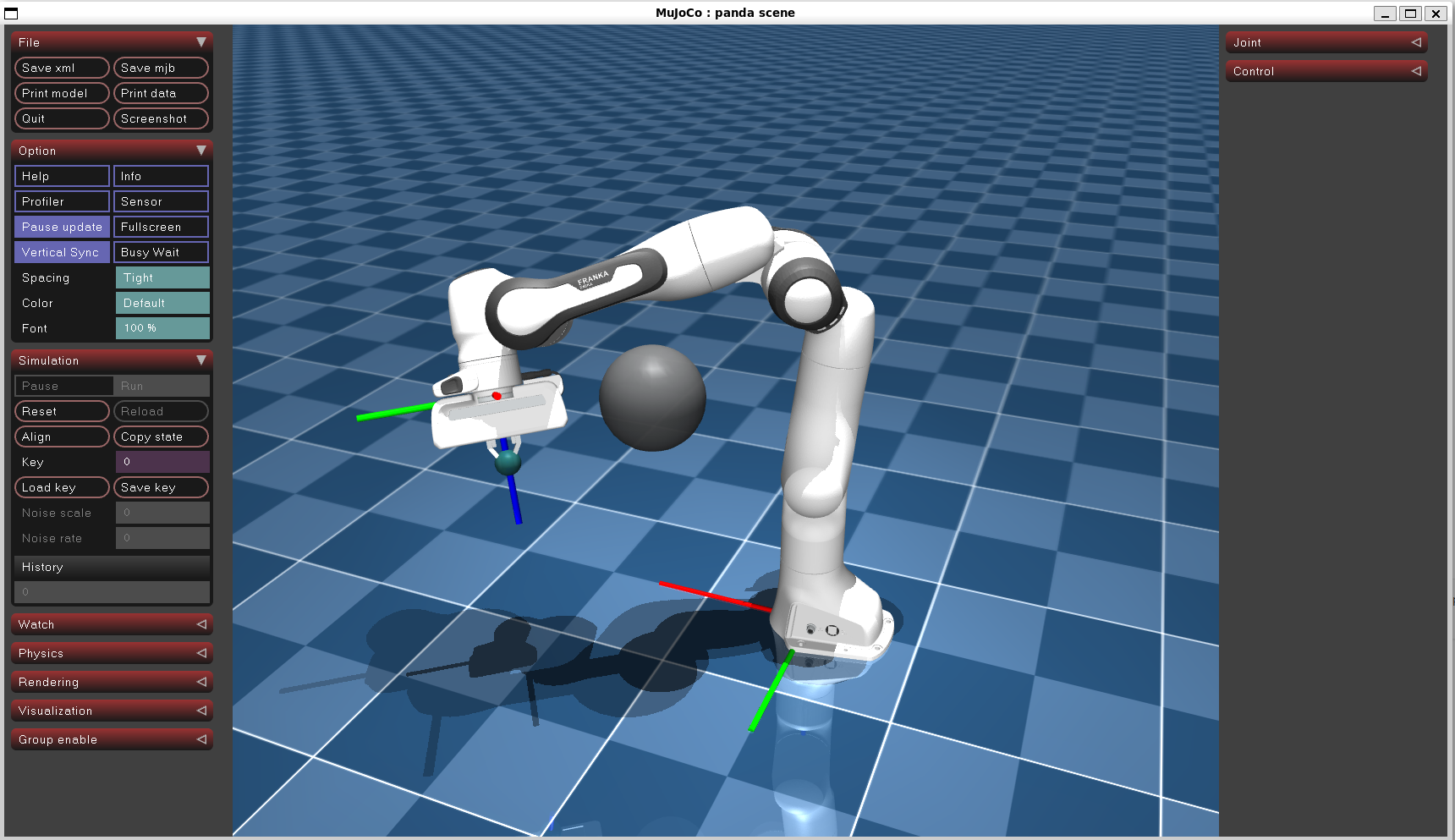
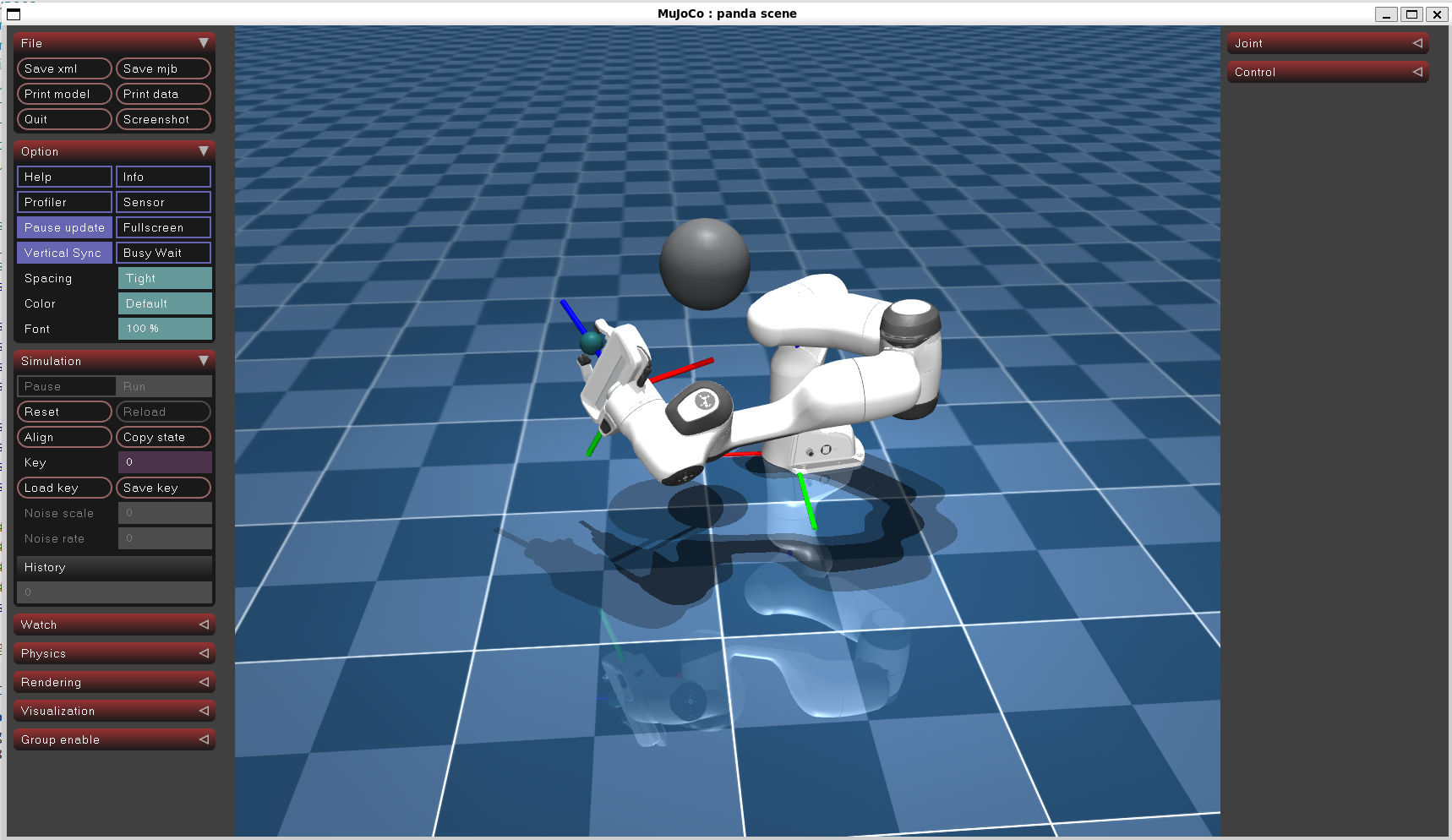
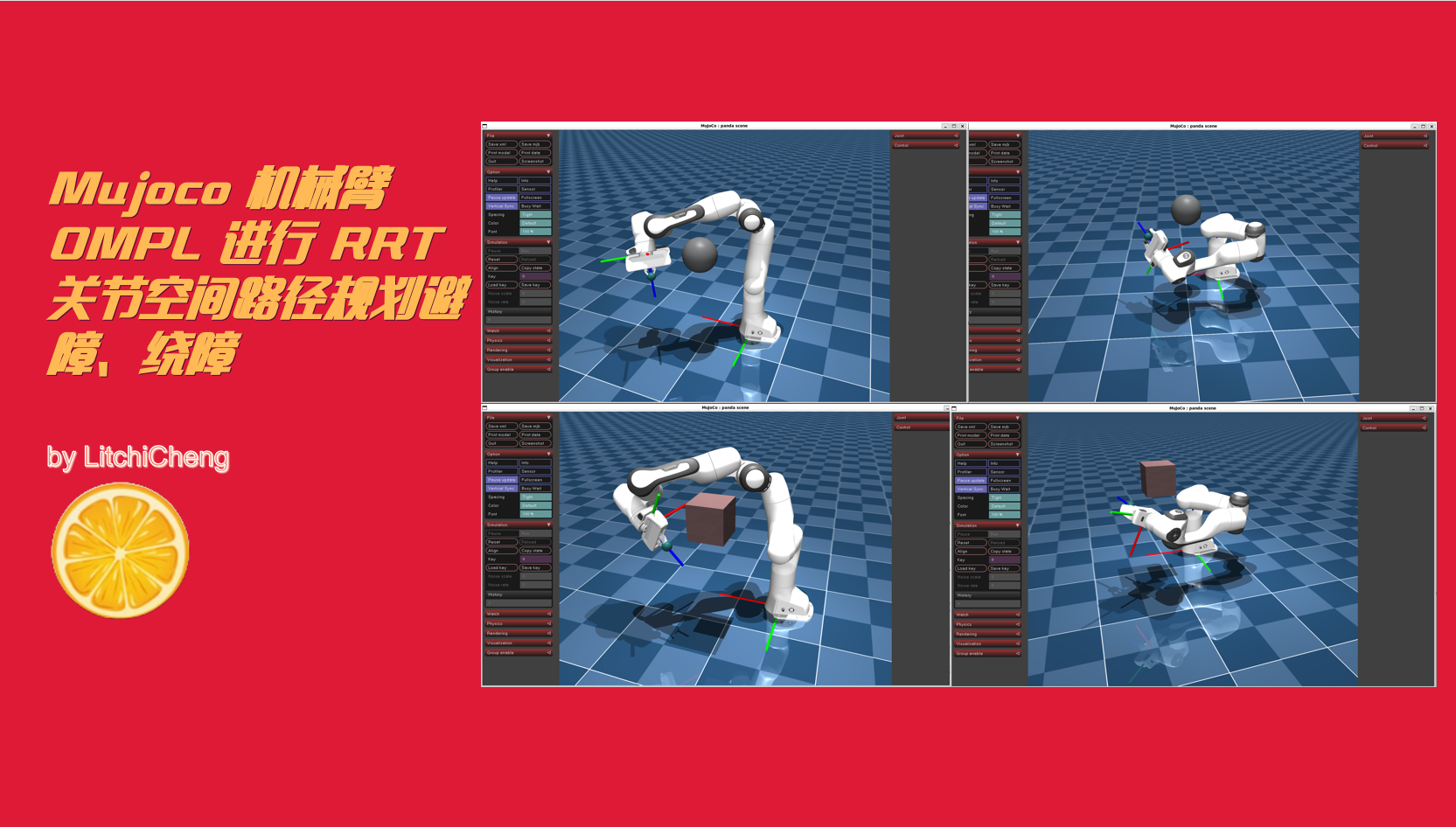
大多数场景下,机械臂的应用一般分为路径规划、轨迹优化、或者运动学 IK,FK,动力学等等,但机械臂仅仅只考虑理想路径的话往往在实际场景中是不够的,在路径规划前静态障碍物、轨迹跟随中动态障碍物,这些都是实际需要考虑的因素,接下来我们来看下同通过关节空间考虑静态障碍物的路径规划,使用 OMPL 库进行规划,关节起始和目标点使用 IK 方式生成。
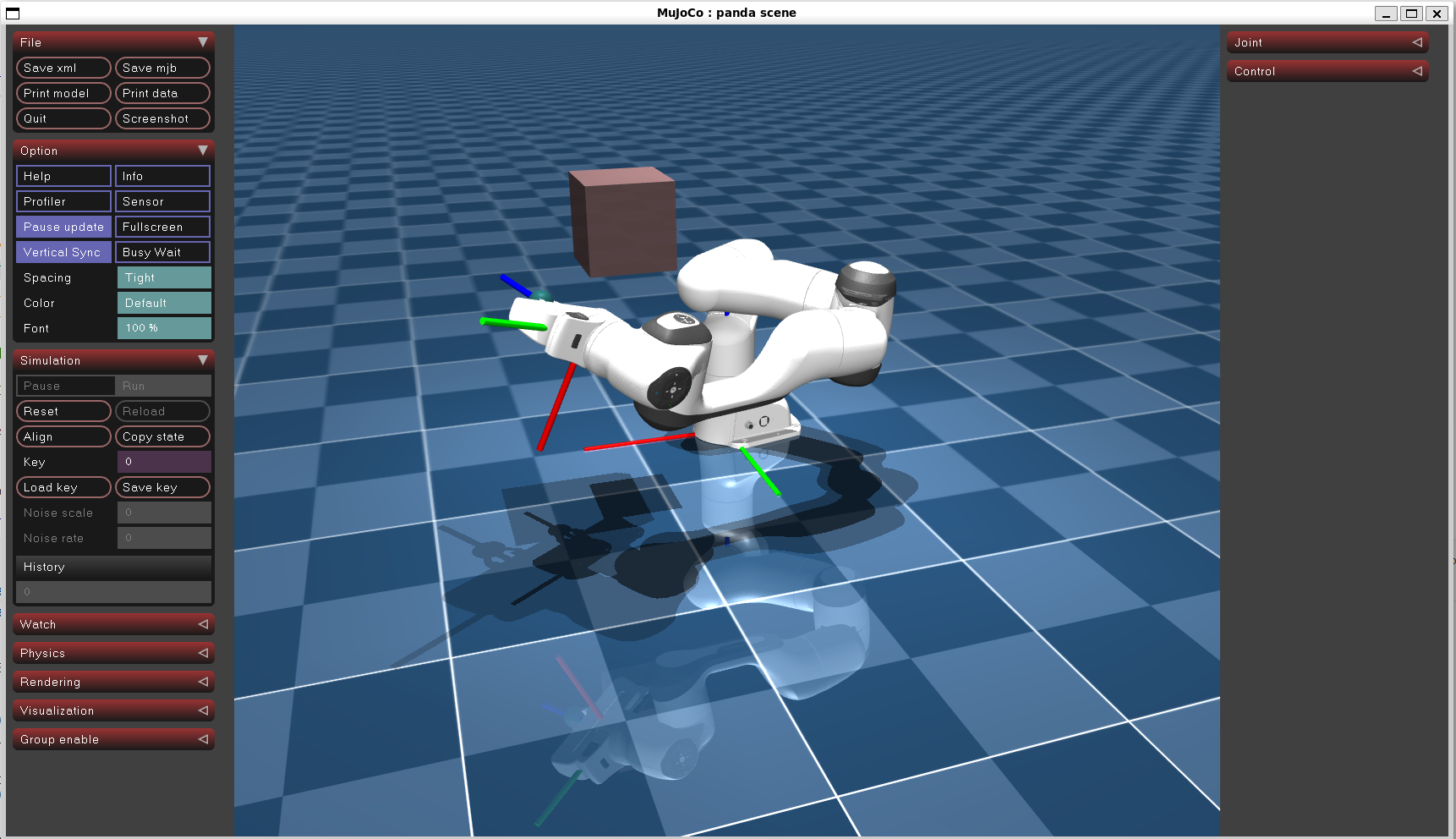
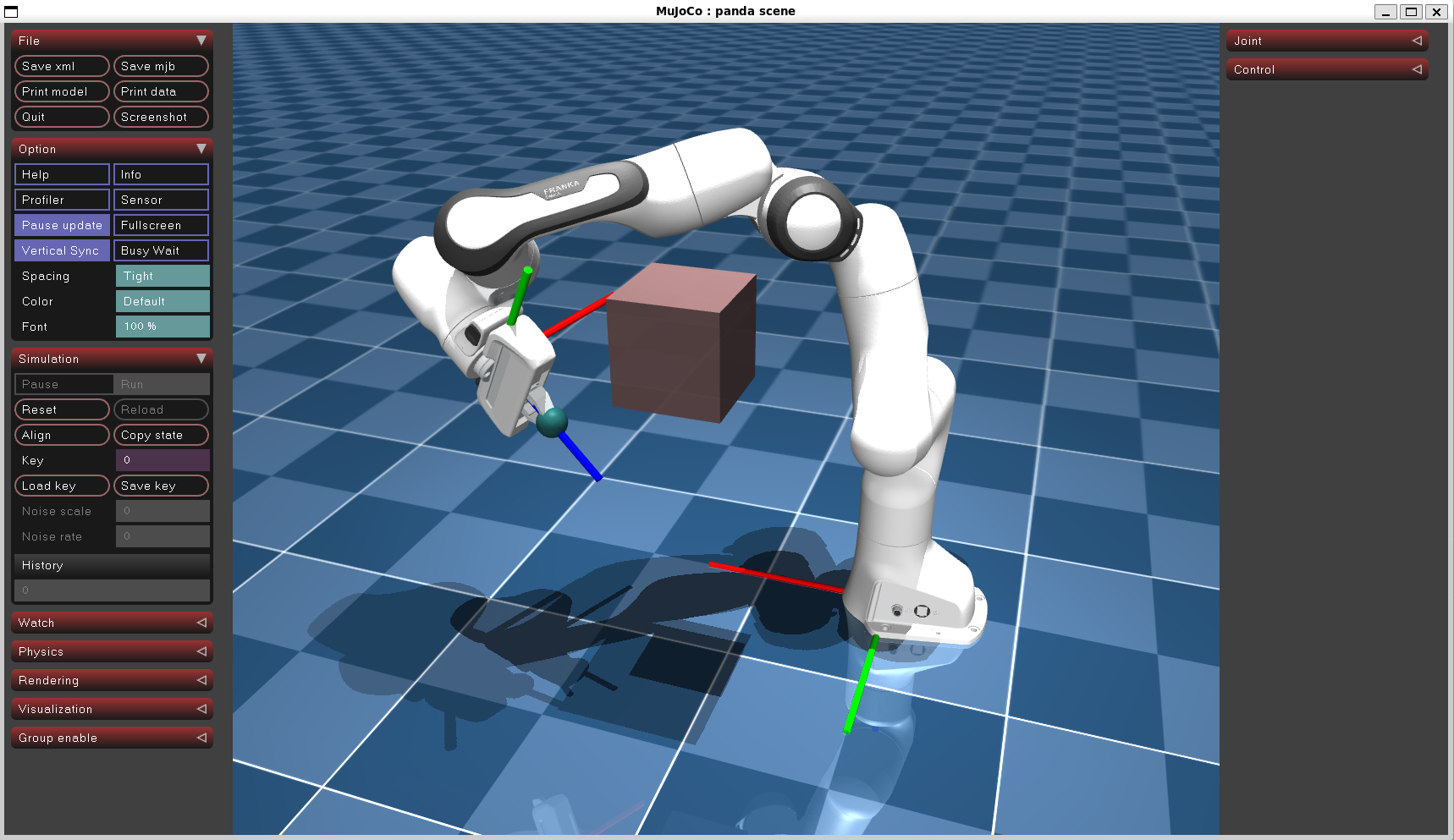
设置静态障碍物的方式可以添加字段到 xml 中,
<geom name="obstacle_0" type="box" size="0.070 0.070 0.070" pos="0.250 0.220 0.500" contype="1" conaffinity="1" mass="0.0" rgba="0.400 0.300 0.300 0.800" />也可以用封装好的方式,直接设置
self.addObstacles(self.obstacles_pos, self.obstacles_type, self.obstacles_size, self.obstacles_rgba)生成起始位置和目标位置生成的方式走 IK:
def getBipolarJoints(self):
self.initial_pos = self.model.key_qpos[0]
print("start dof", self.initial_pos)
for i in range(self.model.nq):
self.data.qpos[i] = self.initial_pos[i]
self.start_dof = self.data.qpos[:9].copy()
euler = np.random.uniform(0, 2*np.pi, 3)
tf = utils.transform2mat(self.goal_x, self.goal_y, self.goal_z, euler[0], euler[1], euler[2])
self.solver = casadi_ik.Kinematics(self.ee_body_name)
self.solver.buildFromMJCF(self.arm_path)
self.dof, info = self.solver.ik(tf, current_arm_motor_q=self.start_dof)
print("goal dof", self.dof)
self.goal_dof = self.dof
if len(self.goal_dof) < 9:
self.goal_dof = np.concatenate((self.goal_dof, self.start_dof[7:]))使用ompl进行关节空间(7x1)的路径规划,搜索路径的方法使用 RRT Connect(两头一起找),将障碍物碰撞数量作为状态是否有效的判断条件(ompl会自动考虑该条件):
def pathPlaning(self):
state_space = ob.RealVectorStateSpace(self.model.nq)
bounds = ob.RealVectorBounds(self.model.nq)
for i in range(min(self.model.nq, self.model.jnt_range.shape[0])):
bounds.setLow(i, self.model.jnt_range[i, 0])
bounds.setHigh(i, self.model.jnt_range[i, 1])
state_space.setBounds(bounds)
si = ob.SpaceInformation(state_space)
def is_state_valid(state):
self.data.qpos[:7] = [state[i] for i in range(7)]
mujoco.mj_step(self.model, self.data)
return self.data.ncon == 0
si.setStateValidityChecker(ob.StateValidityCheckerFn(is_state_valid))
si.setup()
start = ob.State(state_space)
goal = ob.State(state_space)
for i in range(min(self.model.nq, self.model.jnt_range.shape[0])):
start[i] = self.start_dof[i]
goal[i] = self.goal_dof[i]
pdef = ob.ProblemDefinition(si)
pdef.setStartAndGoalStates(start, goal)
opt = ob.PathLengthOptimizationObjective(si)
pdef.setOptimizationObjective(opt)
planner = og.RRTConnect(si)
self.planning_range = 0.01
planner.setRange(self.planning_range)
planner.setIntermediateStates(True)
planner.setProblemDefinition(pdef)
planner.setup()
self.planning_timeout = 3.0
solved = planner.solve(self.planning_timeout)
self.path_states = []
if solved:
self.path = pdef.getSolutionPath()
for i in range(self.path.getStateCount()):
state = self.path.getState(i)
state_values = [state[i] for i in range(self.model.nq)]
self.path_states.append(state_values)
# print(state_values)
else:
print("No solution found.")
self.index = 0
return solved默认尝试10次搜索路径,如果都失败的话,需要去掉障碍物看下是否本身就是在可达空间内,完整代码如下:
import mujoco
import ompl.base as ob
import ompl.geometric as og
import time
import mujoco_viewer
import src.casadi_ik as casadi_ik
import src.kdl_ik as kdl_ik
import src.key_listener as key_listener
import utils
import numpy as np
from pynput import keyboard
key_states = {
keyboard.Key.down: False
}
class Test(mujoco_viewer.CustomViewer):
def __init__(self, rendor_path, arm_path):
super().__init__(rendor_path, 3, azimuth=-90, elevation=-30)
self.arm_path = arm_path
self.obstacles_size = []
self.obstacles_pos = []
self.obstacles_rgba = []
self.obstacles_type = []
self.obstacles_type.append("box")
self.obstacles_size.append([0.07, 0.07, 0.07])
self.obstacles_pos.append([0.25, 0.22, 0.5])
self.obstacles_rgba.append([0.4, 0.3, 0.3, 0.8])
# self.obstacles_type.append("sphere")
# self.obstacles_size.append([0.06])
# self.obstacles_pos.append([0.3, -0.01, 0.7])
# self.obstacles_rgba.append([0.3, 0.3, 0.3, 0.8])
self.addObstacles(self.obstacles_pos, self.obstacles_type, self.obstacles_size, self.obstacles_rgba)
self.key_listener = key_listener.KeyListener(key_states)
self.key_listener.start()
def getBipolarJoints(self):
self.initial_pos = self.model.key_qpos[0]
print("start dof", self.initial_pos)
for i in range(self.model.nq):
self.data.qpos[i] = self.initial_pos[i]
self.start_dof = self.data.qpos[:9].copy()
euler = np.random.uniform(0, 2*np.pi, 3)
tf = utils.transform2mat(self.goal_x, self.goal_y, self.goal_z, euler[0], euler[1], euler[2])
self.solver = casadi_ik.Kinematics(self.ee_body_name)
self.solver.buildFromMJCF(self.arm_path)
self.dof, info = self.solver.ik(tf, current_arm_motor_q=self.start_dof)
print("goal dof", self.dof)
self.goal_dof = self.dof
if len(self.goal_dof) < 9:
self.goal_dof = np.concatenate((self.goal_dof, self.start_dof[7:]))
def pathPlaning(self):
state_space = ob.RealVectorStateSpace(self.model.nq)
bounds = ob.RealVectorBounds(self.model.nq)
for i in range(min(self.model.nq, self.model.jnt_range.shape[0])):
bounds.setLow(i, self.model.jnt_range[i, 0])
bounds.setHigh(i, self.model.jnt_range[i, 1])
state_space.setBounds(bounds)
si = ob.SpaceInformation(state_space)
def is_state_valid(state):
self.data.qpos[:7] = [state[i] for i in range(7)]
mujoco.mj_step(self.model, self.data)
return self.data.ncon == 0
si.setStateValidityChecker(ob.StateValidityCheckerFn(is_state_valid))
si.setup()
start = ob.State(state_space)
goal = ob.State(state_space)
for i in range(min(self.model.nq, self.model.jnt_range.shape[0])):
start[i] = self.start_dof[i]
goal[i] = self.goal_dof[i]
pdef = ob.ProblemDefinition(si)
pdef.setStartAndGoalStates(start, goal)
opt = ob.PathLengthOptimizationObjective(si)
pdef.setOptimizationObjective(opt)
planner = og.RRTConnect(si)
self.planning_range = 0.01
planner.setRange(self.planning_range)
planner.setIntermediateStates(True)
planner.setProblemDefinition(pdef)
planner.setup()
self.planning_timeout = 3.0
solved = planner.solve(self.planning_timeout)
self.path_states = []
if solved:
self.path = pdef.getSolutionPath()
for i in range(self.path.getStateCount()):
state = self.path.getState(i)
state_values = [state[i] for i in range(self.model.nq)]
self.path_states.append(state_values)
# print(state_values)
else:
print("No solution found.")
self.index = 0
return solved
def createTask(self):
try_cnt = 10
self.success = False
for i in range(try_cnt):
self.getBipolarJoints()
self.success = self.pathPlaning()
if self.success:
break
print("Try again... cnt ", i)
def runBefore(self):
self.model.opt.timestep = 0.005
self.ee_body_name = "ee_center_body"
self.goal_x = 0.4
self.goal_y = 0.3
self.goal_z = 0.4
self.usr_geom_size = []
self.usr_geom_pos = []
self.usr_geom_rgba = []
self.usr_geom_type = []
self.usr_geom_pos.append([self.goal_x, self.goal_y, self.goal_z])
self.usr_geom_type.append("sphere")
self.usr_geom_size.append([0.02])
self.usr_geom_rgba.append([0.1, 0.3, 0.3, 0.8])
self.addVisuGeom(self.usr_geom_pos, self.usr_geom_type, self.usr_geom_size, self.usr_geom_rgba)
self.createTask()
def runFunc(self):
if not self.success:
return
if(len(self.path_states) == 0):
return
if self.index < len(self.path_states):
self.data.qpos[:7] = self.path_states[self.index][:7]
self.index += 1
else:
self.data.qpos[:7] = self.path_states[-1][:7]
if key_states[keyboard.Key.down]:
print("re create task")
self.index = 0
self.createTask()
if __name__ == "__main__":
SCENE_XML_PATH = 'model/franka_emika_panda/scene_pos.xml'
ARM_XML_PATH = 'model/franka_emika_panda/panda_pos.xml'
test = Test(SCENE_XML_PATH, ARM_XML_PATH)
test.run_loop()绑定了方向键down,可以重复规划,方便观察