本设计简易高灵活性机械四足机器人的设计与实现的系统架构如图2.1.所示,系统采用STM32F103单片机作为控制器,通过四个SG90舵机实现对四足机器人运动控制,在此可以实现四足机器人的前、后、左、右、站立、趴下等不同状态的运动控制,并通过OLED液晶展示四足机器人的表情状态,同时采用WiFi通信模块实现与手机APP的通信。用户可以通过手机APP实现对四足机器人的运动控制。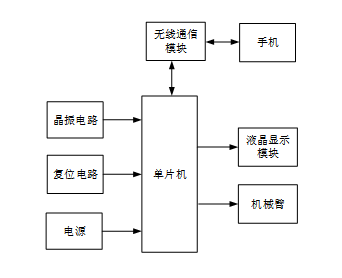
一种简易高灵活性机械四足机器人的设计与实现(论文+源码)
沐欣工作室_lvyiyi2025-12-01 10:05
相关推荐
GeekArch2 小时前
第24讲:Vibe模式代码风格控制——适配Keil/STM32工程规范Freedom_my3 小时前
STM32项目3chase。3 小时前
【学习笔记】PointWorld:迈向通用机器人操控的3D世界模型国科安芯4 小时前
星间光链路:AS32S601型抗辐射MCU在空间激光通信终端控制中的技术实现云间月13145 小时前
搭一套截图识别通知机器人:OCR、飞书Webhook与远程触发实战TsingtaoAI5 小时前
脑控机器人项目交付|用意念指挥机器人,情绪交互与抓取功能全面实现小李不困还能学5 小时前
基于 51 单片机的8 路抢答器设计教程萌动的小火苗5 小时前
嵌入式开发中的栈与队列:任务调度为什么依赖数据结构AI_Auto6 小时前
工业与AI融合应用 | 四个实战用例!机械装备行业AI+数字孪生+机器人落地全景振浩微433射频芯片6 小时前
工业遥控器总在关键时刻“掉链子”?——433MHz芯片方案如何破局