相位
电感中的电流相位落后于电压相位90度(π/2弧度)
电容电流的相位超前电压相位90度(π/2弧度),与电感的电流滞后特性恰好相反。
无源整流器
无源整流器本质是由无源器件(二极管、电容、电感等)组成的功能电路,核心元件均为无源器件。
无源整流器是利用二极管的单向导电性将交流电(AC)转换为直流电(DC)的电路,无需外部电源驱动。常见拓扑结构包括:。
半波整流:使用1个二极管,仅利用交流电的半个周期,效率较低。
全波整流:使用2个二极管(需中心抽头变压器)或4个二极管(桥式整流),利用全部周期,效率更高。
带宽
带宽指闭环系统在正弦信号激励下,输出幅值下降至输入幅值的√2/2(约-3dB)时的频率。
带宽越高,系统
PFC 功率因数校正
功率因数定义为有功功率与视在功率的比值,取值范围为 0~1。PF=1 表示电能完全被有效利用,PF<1 则存在无功功率浪费。
有源 PFC
通过高频开关管(如 MOSFET)和控制芯片主动调节电流波形,校正效果优异(PF 可达 0.95 以上),且适应宽电压输入(90~264V),广泛用于大功率设备(如服务器电源、光伏逆变器、储能变流器)。
常见拓扑:Boost 型有源 PFC(最主流),通过升压电路实现电流跟踪控制。
对快速变化信号的响应能力越强。
MPPT 算法
双向扰动观察法
核心工作原理:
1、正向扰动阶段
向某一方向(如增大电压)施加扰动,记录功率变化量ΔP1。
2、反向扰动阶段
施加与第一步等幅但方向相反的扰动(如减小电压),记录功率变化量ΔP2。
3、方向判断阶段
通过公式ΔPs = (ΔP1 - ΔP2)/2计算纯扰动引起的功率变化,若ΔPs > 0则第一步方向正确,否则采用第二步方向。
变步长策略
通过光伏阵列输出功率对电压的导数(dP/dU)判断距离MPP的位置:
当|dP/dU|较大(远离MPP),采用大步长(如0.5V)以快速接近目标;
当|dP/dU|趋近于0(接近MPP),切换为小步长(如0.1V)以减小稳态振荡。
特殊处理:为避免系统卡在非MPP异常点,定时(如每5个周期)施加一次大步长扰动以跳出局部极值。
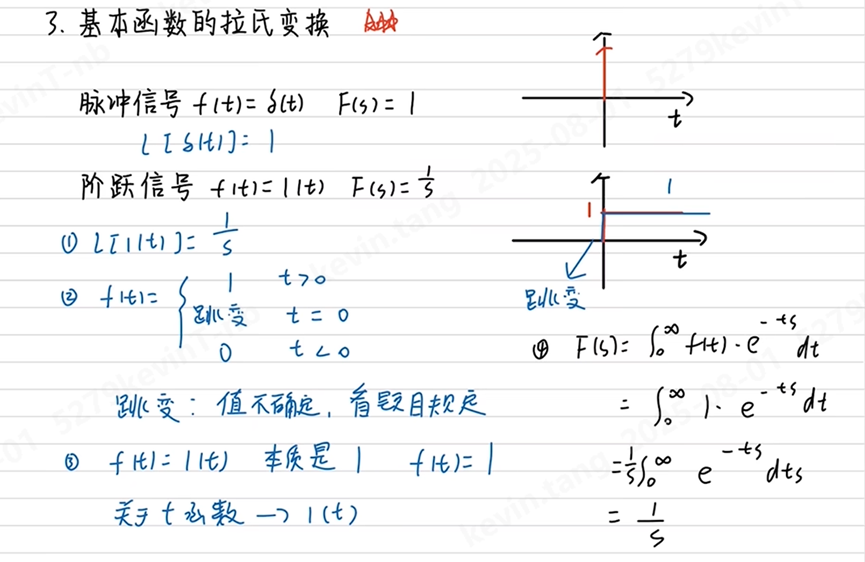
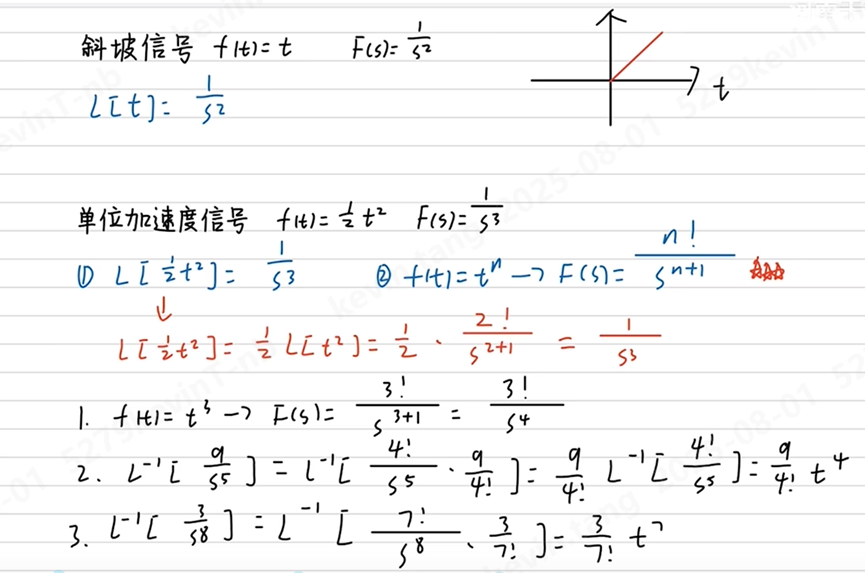
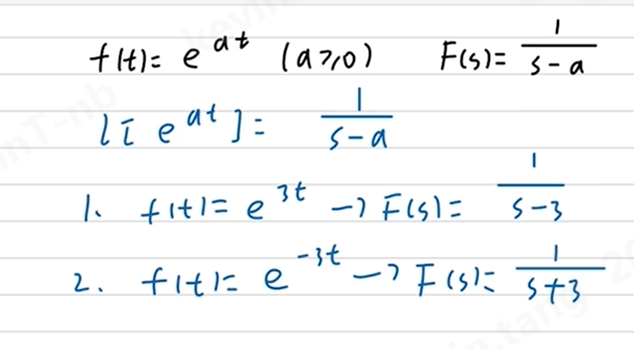
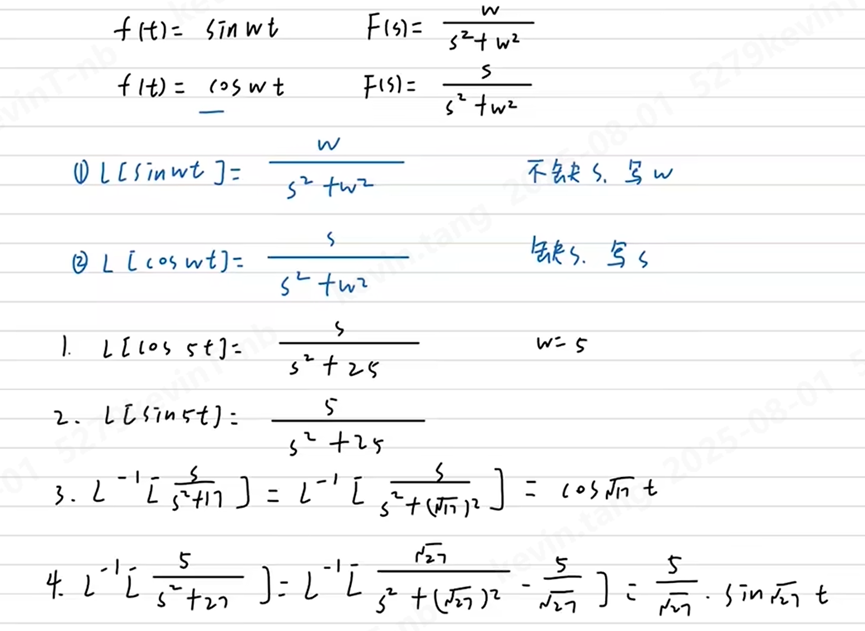
拉氏变换
多电平逆变器
多电平逆变器是一种能够输出阶梯波电压的电力电子装置,通过多个直流电源单元串联或组合,实现对输出电压的多级调节。
主要优点:
降低电压应力:功率开关器件承受的电压仅为直流侧总电压的一部分,可直接使用低压开关管实现高压输出
改善输出波形质量:通过增加电平数量,输出电压的谐波含量显著降低,无需大容量滤波器即可满足电网或负载的谐波要求,提升系统效率。
减少电磁干扰(EMI):较低的电压变化率(dv/dt)降低了对周边设备的电磁干扰
提高系统可靠性:模块化结构设计支持冗余运行,单个功率单元故障时,系统可降级继续工作,增强了工业应用中的稳定性。(冗余运行是指在系统中设置多余的组件或路径,以提高系统的可靠性和稳定性,确保在部分组件出现故障时,系统仍能正常运行。)
适应宽范围功率需求:从千瓦级分布式发电到兆瓦级工业传动系统,多电平拓扑(如NPC、级联H桥等)可灵活配置以匹配不同功率等级。
三电平逆变器典型拓扑结构 NPC和CHB
NPC二极管钳位型:通过两个钳位二极管将直流侧电压分为上下两部分,每个开关管承受直流侧一半电压。
级联H桥型(CHB):由多个H桥单元串联构成,每个单元独立控制,容错能力强,且易于模块化扩展。但需要独立直流电源,更适用于新能源并网(如光伏、储能系统)。
微电网是一种小型化、自治化的电力系统,能够独立运行或与主电网灵活互联,整合分布式能源(如光伏、风电)、储能设备、负荷及控制管理系统,实现能源的本地生产、存储与高效利用。
并网模式:与主电网连接,可实现电力双向流动(如将多余光伏电力馈入电网)
离网模式:在主电网故障或断电时,通过储能系统维持关键负荷供电,保障用电连续性
钳位与限幅均用于电压控制,但钳位更强调将电压固定在特定电平(如将信号顶部钳位到5V),而限幅通常允许电压在一定范围内波动(如±0.7V的双向限幅)。例如,钳位电路可将交流信号转换为单极性信号,而限幅电路主要用于消除信号中的尖峰干扰。
T型三电平(是对NPC型的改进)
在 T型三电平拓扑 中,共模成分控制尤为关键:
中点平衡电路:通过电容分压平衡母线电压,减少共模电压波动;
共模电感设计:在PCS模块的交流输入侧,采用"非重叠绕制"工艺降低寄生电容,提升高频共模抑制能力;
EMI滤波器:结合X电容(差模滤波)和Y电容(共模滤波),满足EN 61000-6-3等电磁兼容标准
DQ变换
在同步旋转坐标系(dq坐标系)中,cos成分对应d轴、sin成分对应q轴的本质是由Park变换的定义和坐标系旋转方向共同决定的,核心目的是将交流量转化为直流量以便控制。
Park变换的坐标投影
假设三相交流电压经Clarke变换后,在两相静止坐标系(αβ坐标系)中表示为:
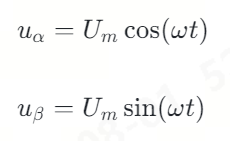
(其中 ( U_m ) 为电压幅值,( \omega t ) 为电角度)
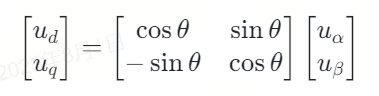
Park变换将αβ坐标系旋转至与电压矢量同步旋转的dq坐标系,变换矩阵为:

代入推导:d轴与cos对应,q轴与sin对应

结论:当dq坐标系与电压矢量同步旋转时,αβ轴的余弦和正弦分量经Park变换后,分别映射为d轴的直流量和q轴的零值,即 cos对应d轴,sin对应q轴
d轴定向与功率控制
- d轴定向的目标
在电机控制或并网逆变器中,通常采用 d轴定向(将d轴锁定在电压矢量方向),此时:
d轴分量:对应有功功率(如电机的电磁转矩、逆变器的有功输出);
q轴分量:对应无功功率(如电机的励磁电流、逆变器的无功输出)。
- 锁相环(PLL)的验证
锁相环的目标是通过调节dq坐标系旋转角θ,使q轴分量 ( u_q = 0 ),此时d轴分量 ( u_d = U_m )。从公式推导可知: