一、 公司概况
北京星动纪元科技有限公司(以下简称"星动纪元")成立于2023年8月,总部位于北京,由清华大学交叉信息研究院孵化,是唯一一家清华大学持股的人形机器人企业。
公司的定位是成为"原生通用具身智能体定义者",以"开启机器人星纪元"为使命,致力于通过 "具身大脑"与"人形本体"软硬一体全栈自研,打造通用大脑及通用机器人。
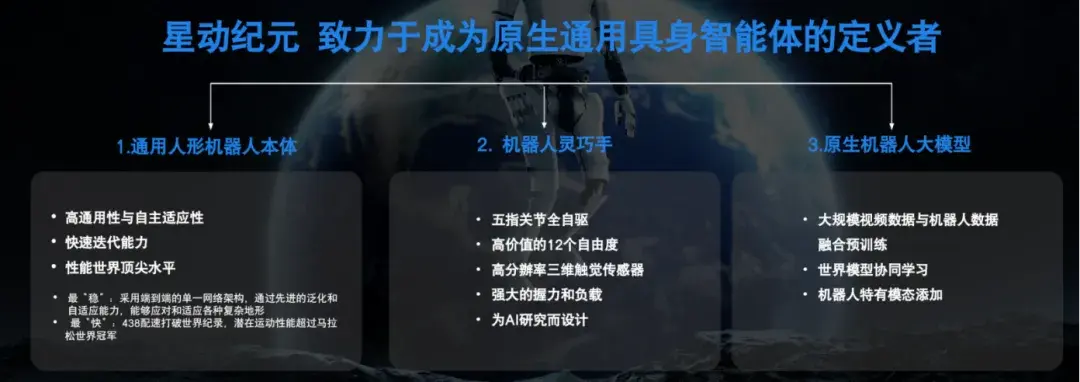
星动纪元企业定位(信息来源:星动纪元)
1. 创始团队
星动纪元团队成员来自清华大学、北京大学、北京理工大学、哈工大、加州伯克利、新加坡国立等全球顶尖学府。其中,研发人员占比超 80%,博士占比超 30%,涵盖机器人控制、AI 大模型、机械设计等全链条领域。
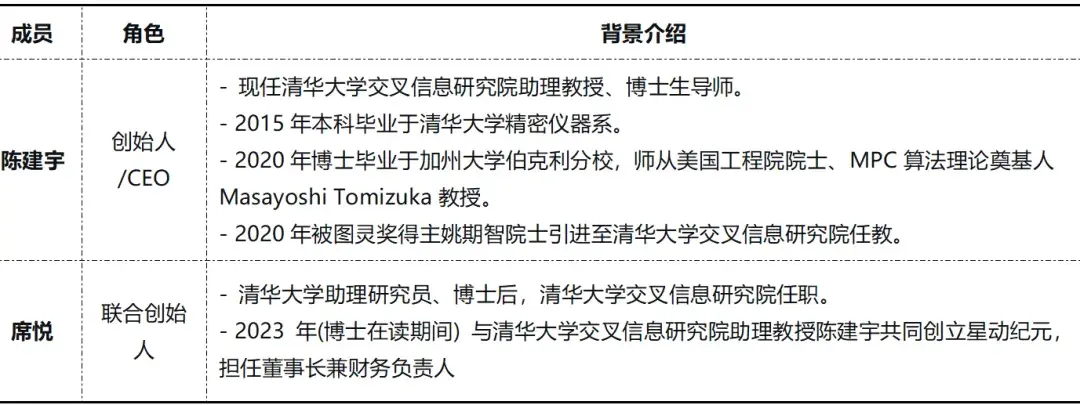
星动纪元初创成员(机器觉醒时代制图)
2. 融资情况
星动纪元自成立以来,以强劲的技术实力和商业化进展获得了资本市场的持续加注。公司在短时间内完成多轮融资,累计融资规模近20亿元,获得了吉利、阿里巴巴、海尔等多家产业资本和一线投资机构的青睐。

星动纪元融资情况(机器觉醒时代制图)
二、产品体系
当前,星动纪元已建立了完整的产品矩阵,覆盖从核心部件到整机的全链条产品,包括一体化关节模组、机器人灵巧手以及通用人形机器人(足式/轮式以及只有上半身的操作平台)。

产品系列(图片来源:星动纪元)
据官方称,星动纪元从零件、部件到整机,硬件的自研比例超过95%,具体包括关节模组、灵巧手、电机、减速器、控制器等核心部件。这将成为其供应链保持稳定与可控性的根本保障。
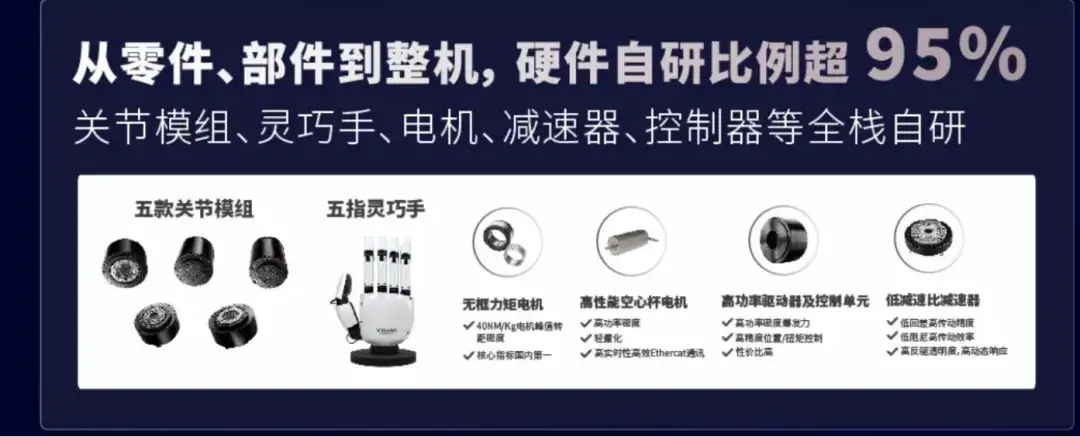
硬件自研比例超95%(图片来源:星动纪元)
1. 通用人形机器人
- 2024年8月19日,星动纪元推出旗下首款产品级人形机器人"星动STAR1"。
- 2025年6月19日,星动纪元推出轮式服务机器人"小腰精" 星动 Q5。
- 2025年7月22日,星动纪元推出全尺寸双足人形机器人星动L7和半身模块星动M7(操作平台)。

星动纪元产品开发进展(图片来源:星动纪元)
1)轮式人形机器人 ------ 星动Q5
2025年6月19日,星动纪元推出轮式服务机器人星动Q5。该机器人身高1.65m,体重70kg。全身自由度达44个(含末端执行器),具体分布为:颈部自由度2个,手臂自由度7个*2,腰部自由度1个,腿部自由度3个,底盘自由度2个,灵巧手自由度11个*2。
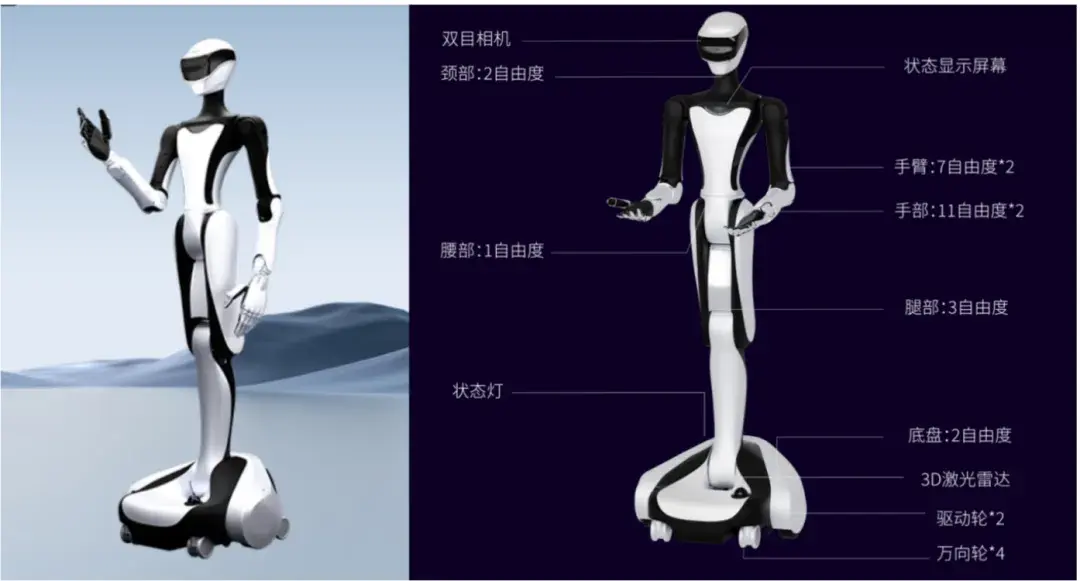
星动Q5产品参数(图片来源:星动纪元)
在操作层面,星动Q5搭载了仿生7轴高精度机械臂和拥有11自由度的"星动精灵手"XHAND1-Lite,构成了高度灵巧的操作系统。其手指动作迅捷,点击速度可达每秒10次,确保了高频任务的执行效率。同时,单臂负载能力达10kg,使其能够可靠执行商业服务中从精准操作到稳健搬运的各类任务。
**在运动层面,**星动Q5通过恰到好处的自由度配置与1380mm的长臂展设计,实现了灵活性、稳定性与作业范围的良好平衡。其颈部(2个)与腰部(1个)共配备3个自由度,支持头腰协同运动,使机器人能够灵活转向并完成多角度弯腰动作;同时,3个腿部自由度为其提供了稳定的机身升降能力,可从容适应不同高度的工作需求。
基于上述设计,Q5能够在广阔的操作空间内执行大跨度任务。从高处取物到下蹲拾取低处物品,其长臂展与多关节的协调控制确保了动作的连贯与精准执行。
在智能交互层面,星动Q5 搭载双目摄像头与激光雷达,深度融合拟人化语音引擎及大模型技术,具备强大语义理解与对话能力,可精准响应37种以上语言指令,能实现流畅自然的人机交流和提供陪伴式答疑服务。
**在数据采集层面,**星动Q5构建了一套完整的"全身遥操作-数据采集-模型迭代"技术闭环。该系统支持操作者通过数据手套、VR设备等外设,将全身动作精准映射给机器人。同时,它提供了一套覆盖数据采集、处理、模型训练与校验的全流程工具链。这一闭环系统为具身智能研究搭建了理想的实验平台,并显著提升了机器人技能学习与模型优化的效率及可靠性。
2)双足人形机器人------ 星动L7
2025年7月22日,星动纪元推出全尺寸双足人形机器人L7。该机器人身高1.71m,体重65Kg(不含灵巧手)。全身总自由度高达55个(含灵巧手),具体分布为:颈部自由度2个,手臂自由度7个*2,腰部自由度3个,腿部自由度6个*2,灵巧手自由度12个*2。

星动L7产品参数(图片来源:星动纪元)
针对不同场景需求,星动纪元将L7 划分为两个版本:星动 L7-U(半身形态,由上半身与立柱组成)与星动 L7(整机形态)。两者的核心差异在于,L7-U 以立柱替代了 L7 的下肢双足结构,其余核心配置保持一致。

星动L7与星动L7-U(图片来源:星动纪元)
在操作层面,其核心操作单元由仿人机械臂与灵巧手构成:手臂采用7轴设计,配合十字轴手腕,实现了前后±90°与侧摆±45°的广阔摆动范围,赋予其接近人类手臂的灵活性。
在此基础上,L7搭载了拥有12个主动自由度的星动XHAND1灵巧手。这款灵巧手不仅能够精准操作各类工具,其手指点击频率更高达10次/秒,展现出堪比电竞选手的迅捷反应。超长的臂展设计进一步拓展了其工作边界,使其能够在直径达2.1米的空间内进行大范围作业。
同时,可提供高达20kg的双臂负载能力,确保了其在执行任务时兼具力量与精度。
在运动层面,其运动系统基于高性能关节(最高扭矩400 Nm,最高转速25 rad/s),再配合3自由度腰部设计,使其具备了优良的运动能力:不仅能在自然步态下稳定完成行走、奔跑、360°旋转跳跃等复杂动作,更在室外实测中达到了4m/s的跑步速度。
在控制器层面,星动L7采用NVIDIA Jetson AGX Orin (275 TOPS) + Intel (80TOPS)处理器的双芯片架构,构建了强大的 "AI 大脑",为人形机器人在强化学习、模仿学习和端到端大模型研究中提供了强大的算力支持。
在感知和智能交互层面,星动L7搭载双目相机、3D激光雷达和麦克风阵列,共同构成了机器人的"眼睛"和"耳朵",为模型提供了丰富的环境原始数据。
2. 灵巧手
- 2024年11月,星动纪元推出"电竞手"星动XHAND 1;
- 2025年5月,星动纪元推出"精灵手"星动XHAND 1 Lite。
这两款产品形成星动纪元灵巧手产品线的 "高低搭配":XHAND 1以12个主动自由度和全直驱方案成为 "性能天花板",适合工业精密操作和专业科研;XHAND 1 Lite则以轻量化设计和适中性能主打家庭服务和教育市场。
根据实际应用需求的精度、负载和成本要求,两款产品分别在不同领域发挥优势,共同构建星动纪元 "从实验室到家庭" 的灵巧操作生态。
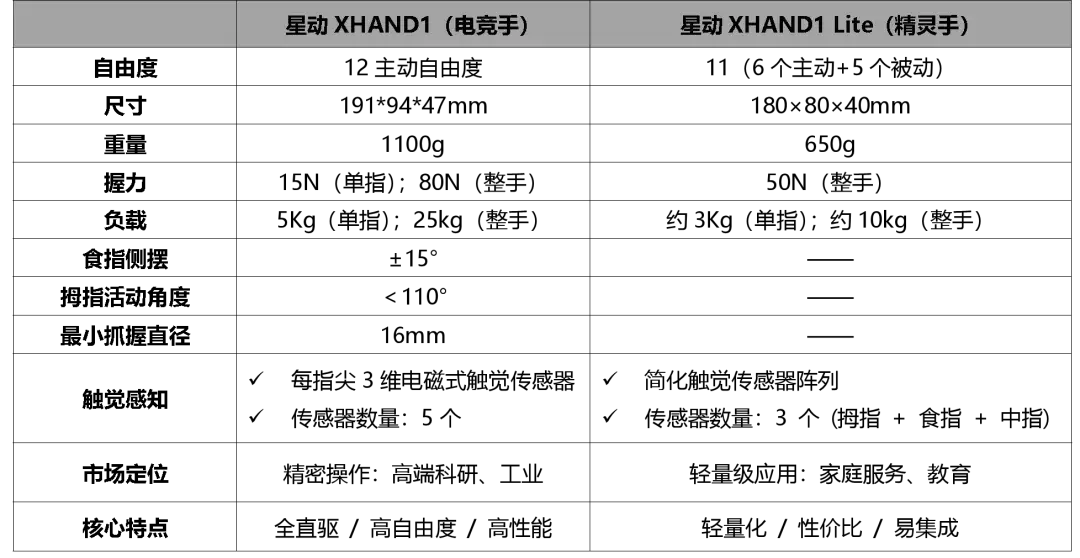
星动XHAND1 VS 星动XAND1 Lite(机器觉醒时代制图)
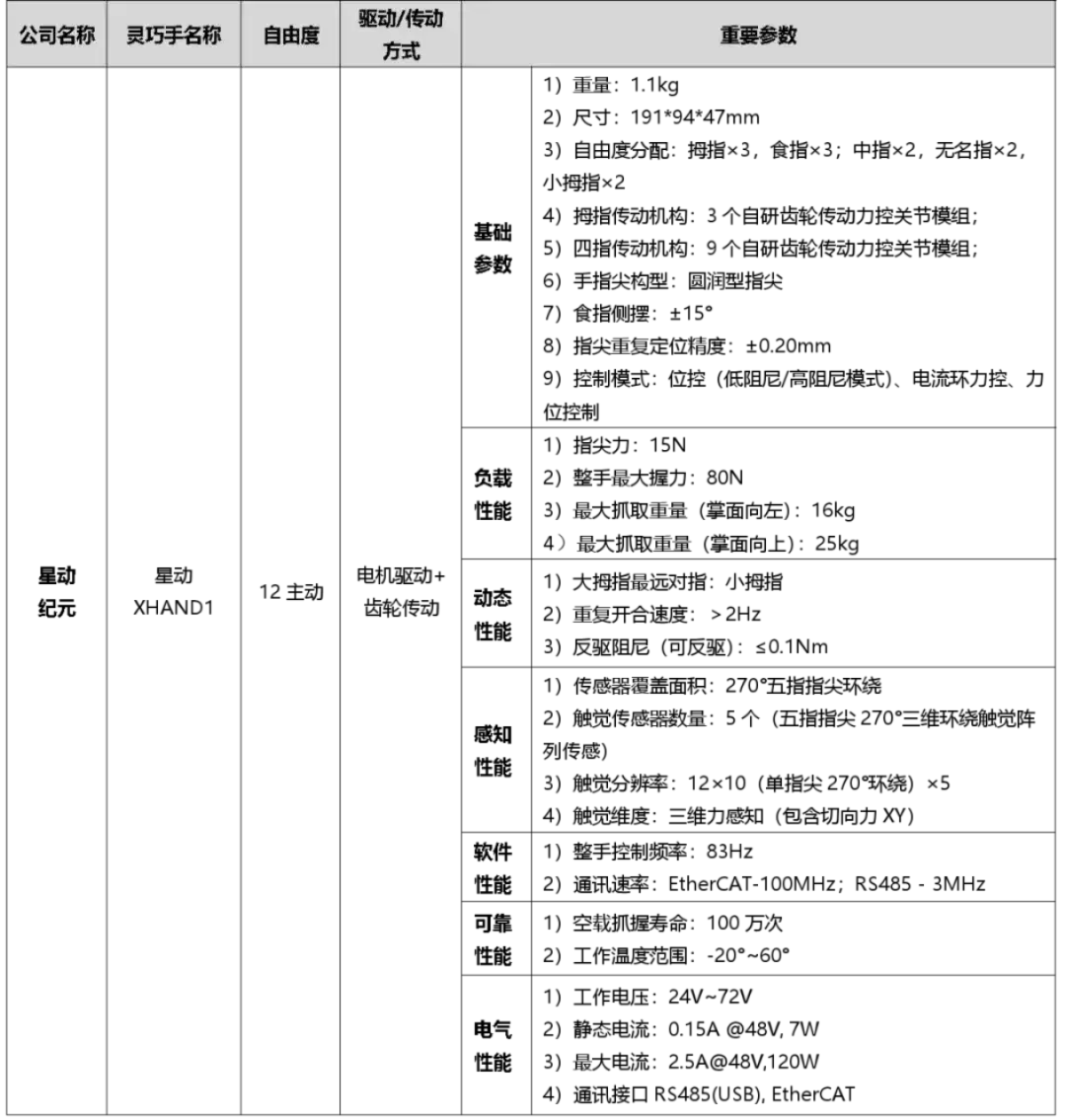
星动XHAND1 详细参数介绍(机器觉醒时代制图)
3. 一体化关节模组
星动纪元专为人形机器人的高运动性能需求,自研了一体化关节模组。该模组采用高度集成化设计,将无框力矩电机、精密行星减速器、高精度编码器及驱动器融合为一体。主要产品型号有:15017和10520。
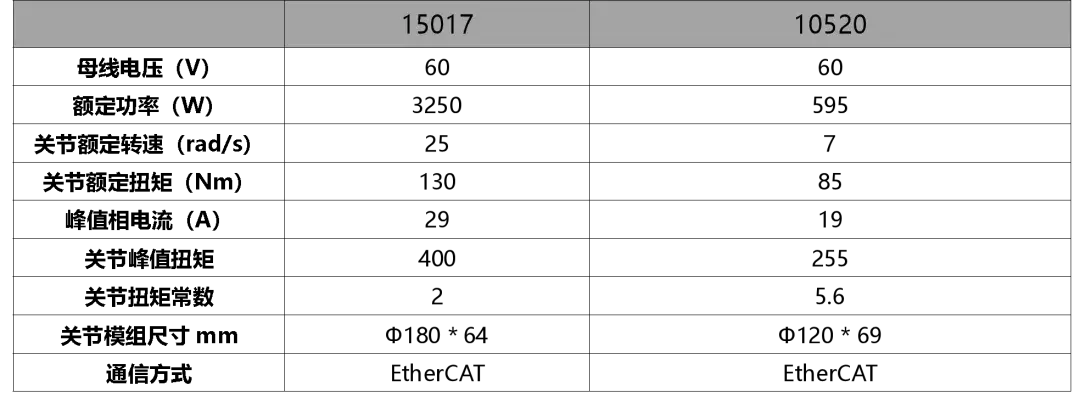
关节模组产品参数(机器觉醒时代制图)
三、具身智能模型
1. 具身智能模型的发展阶段
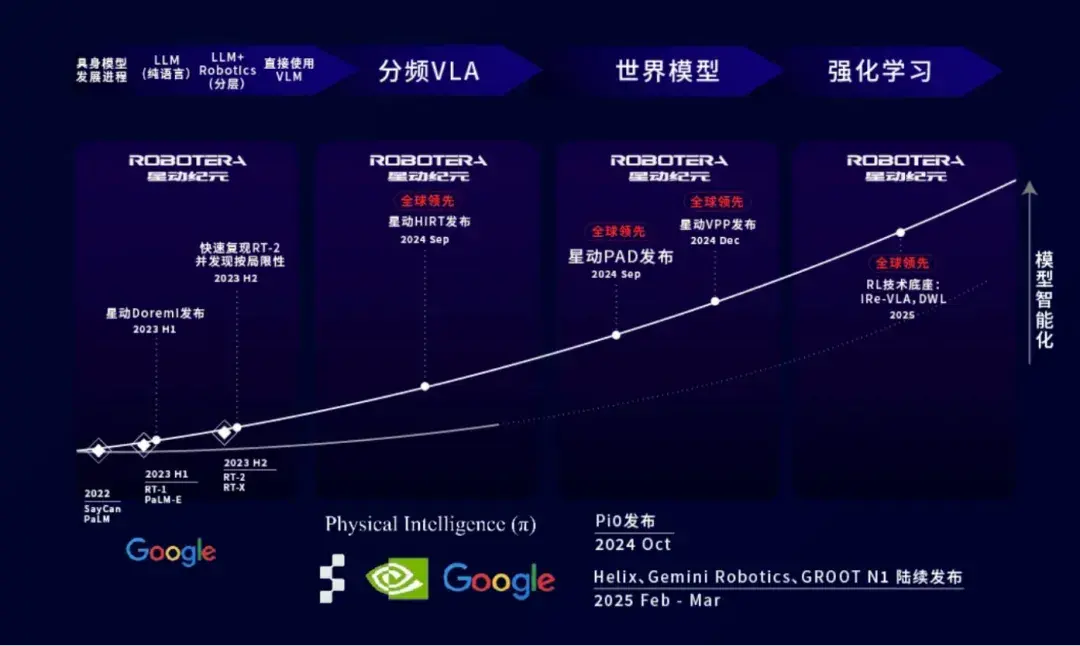
具身智能模型发展的四个阶段(图片来源:星动纪元)
星动纪元把具身模型的研究范式分为四个阶段:
1)第一阶段:实现"像人一样认知"的能力 | LLM以及VLM
从2023年开始,随着ChatGPT3.0 的出现后,大语言模型(LLM)和视觉语言模型(VLM)的"认知"能力已经获得质的提升。具身智能行业随之进入一个新阶段:探索如何将这些模型的认知能力赋能给机器人。此阶段,"认知"和"执行"仍是相互独立的两个模型:上层利用语言模型充当"大脑",进行任务分解与规划;下层的具体动作执行仍由传统编程实现。
2)第二阶段:"实时做"并"深思考"阶段 | 分频VLA
该阶段的主流模型是以PI的π0 以及Figure 的Helix模型等为代表的"快慢系统" 架构 :相当于在VLM的基础之上,拓展了一个专门处理行为动作的Action模块。这两个部分通过端到端的训练方式,被整合为一个统一的系统,即把VLM的深度语义理解能力与机器人所需的实时行为动作能力有机结合成了一个端到端模型。
2024年9月, 星动纪元推出HiRT快慢分层架构,并提出分频VLA的概念。该模型通过latent向量连接70亿参数世界模型与4000万参数的动作执行模型。
3)第三阶段:解决数据稀缺瓶颈 | 世界模型
该阶段引入了以Sora 为代表的生成式世界模型。机器人需要跟物理世界进行交互,但LLM或VLM仍然是在一个抽象的空间去理解。然而,像Sora这类的生成式模型不仅能够捕捉到非常精细的物理交互,还能够从广泛的无标注互联网视频数据里面去学到物理世界的规律和知识。 引入世界模型能够解决数据稀缺的瓶颈问题。
2024年9月,星动纪元发布了融合世界模型的VLA算法框架 PAD(Prediction with Action),PAD 通过融合世界模型,实现了机器人从互联网视频数据中学习物理世界规律的能力,为解决具身智能数据稀缺瓶颈提供了突破性方案。
2024年12月,星动纪元联合清华大学交叉信息学院 ISR Lab联合发布了生成式机器人大模型VPP(Video Prediction Policy)。该模型有助于将机器人训练数据从有限的真机操作扩展到海量互联网视频,大幅降低对高质量标注数据的依赖。(VPP被业界誉为 "机器人界的 Sora",并于 2025年5月7日正式开源。)
4)第四阶段:提升学习能力 | 强化式范式
该阶段的代表模型就是DeepSeek 。它之所以广受关注,就是因为它的R1模型使用了强化学习。之前的VLA具身模型基本上还是属于从人类的示范里进行完全的模仿来学习。但这样会产生两个问题:一是,没法超越示范本身的能力;二是,对于物理世界具体的示范表现欠佳。星动纪元在这方面也做了相应的探索,用强化学习去后训练基于模仿学习的VLA模型,最终提升了模型的任务成功率与整体任务性能。
2024年9月,星动纪元提出了使用强化学习训练具身大模型的算法框架iRe-VLA。iRe-VLA 旨在通过创新的 "冻结 - 训练 - 微调" 循环机制,解决大型 VLA 模型强化学习训练不稳定的行业难题,为星动纪元具身大模型 (如 ERA-42) 的实际应用和持续优化提供了坚实技术支撑,使机器人能够更安全、高效地在真实世界中执行复杂任务并不断学习进化。
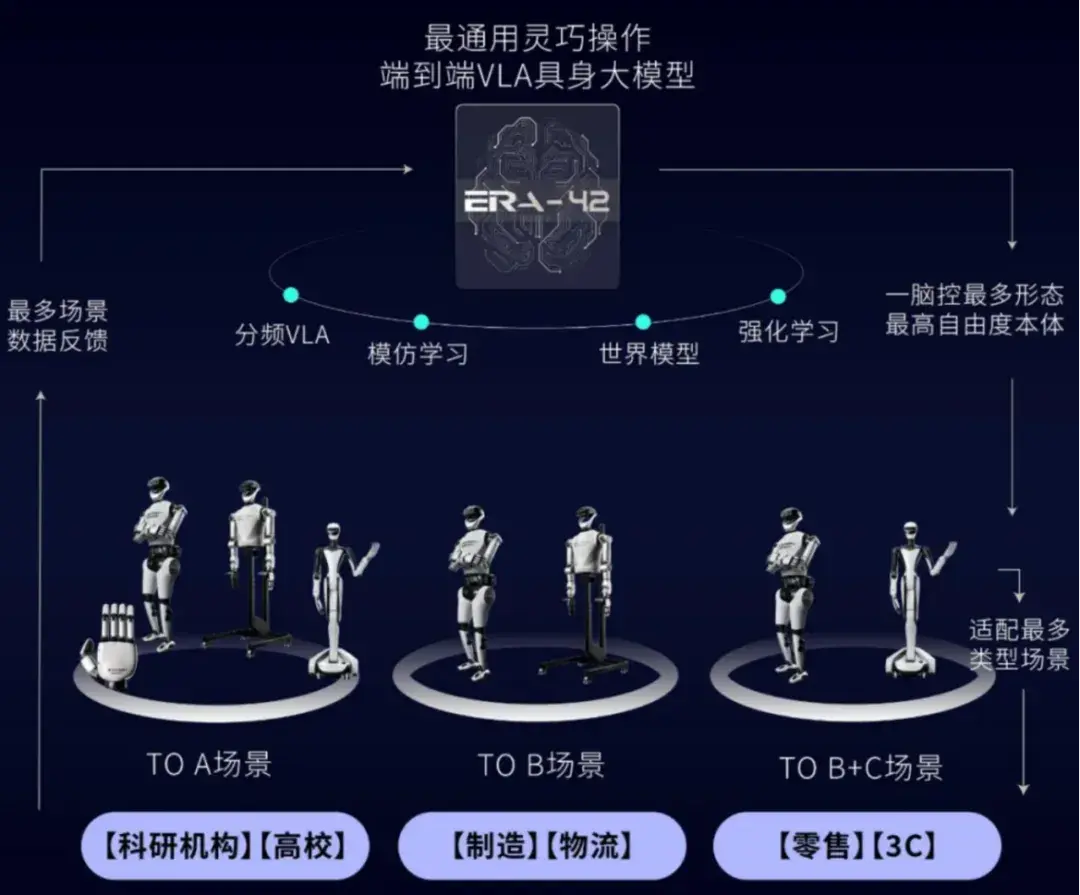
2. 原生机器人大模型ERA-42
2024年12月,星动纪元推出端到端原生机器人大模型ERA-42。目前,该模型已实现对高自由度全尺寸双足人形机器人全身及五指灵巧手的精准控制。
1)模型架构
ERA-42模型采用高层次规划和低层次控制的双系统架构。系统之间使用latent变量进行通信连接,实现了两者之间的高效信息传递和协同工作。
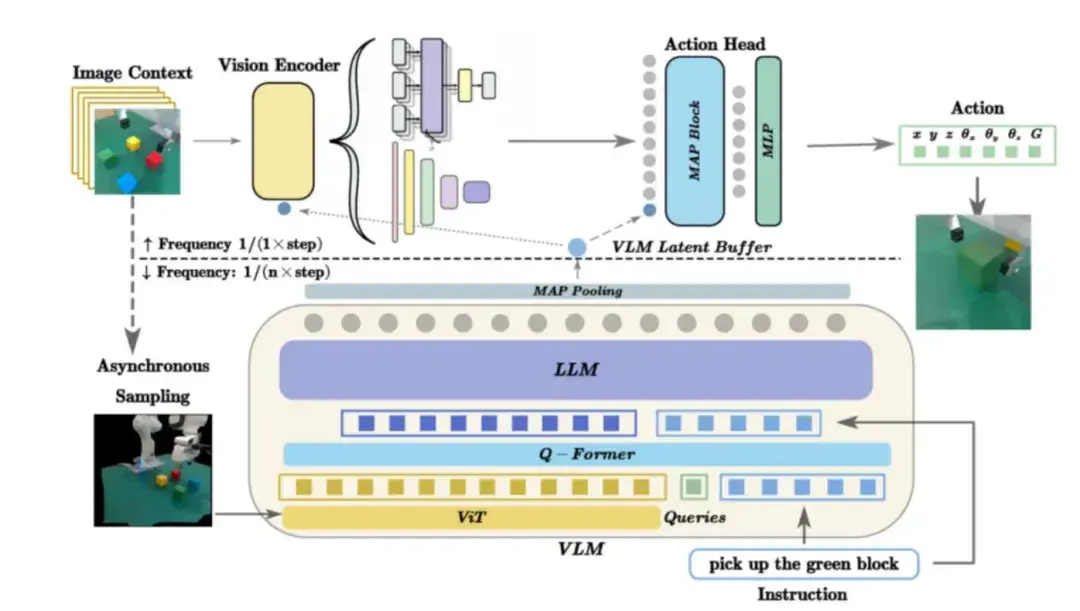
ERA-42模型架构(初版)
**a. 高层次规划系统:**采用7B参数的InstructBLIP视觉语言模型,负责将视觉信息与语言指令转化为蕴含常识知识的潜在特征,支持长期场景理解(含任务规划与纠错)。
它相当于是人类的"慢思考"系统,可以对任务指令进行深入理解,生成高层次的动作规划,为机器人的行为提供战略指导。
其中,InstructBLIP 由预训练视觉编码器(采用ViT架构)、大语言模型(LLM)、可学习查询 tokens 以及 Q-Former 组成。
**b. 低层次控制系统:**采用40M参数的紧凑型视觉驱动动作策略的Transformer网络,处理短期场景认知,融合历史观测与视觉语言模型的潜在特征。
它相当于是人类的"快思考"系统,根据高层次规划系统的输出结果以及实时的环境反馈,它可以实现高频地精确控制机器人的动作,确保动作的准确性和实时性。
工作原理:
指令经由视觉语言模型(VLM)转化为连续潜在表征(continuous latent),并与采样视觉观测数据共同缓存至潜在缓冲区(latent buffer)。在推理的每一步:
- 预训练视觉编码器基于最新潜在表征对视觉观测进行条件化编码;
- 降维后的视觉语言标记(reduced vision-language tokens)通过条件化动作头(conditioned action head)解码为底层动作。
ERA-42 初版基于 HiRT 架构构建,而在后续的迭代版本中通过集成动作预测扩散器(PAD)升级了世界模型,形成以 HiRT 为基础框架、PAD 为预测模块的复合架构。
2)模型训练
**模型训练使用数据类型:**大规模视频数据(预训练)+少部分基于遥操作的真机数据(后训练)。
- **预训练阶段:**由于采用融入世界模型的方式,ERA-42可以直接利用未标注的互联网视频数据进行预训练,使模型聚焦于原始视频本身的预测,而非对物体姿态、关键点等处理后的信息进行预测。此举旨在最大程度保留信息完整性,规避因人为定义的规则、范式或先验知识导致的信息损耗。
- **后训练阶段:**ERA-42 引入强化学习技术,通过构建奖励机制引导模型探寻最优动作策略。此阶段的模型训练主要采用基于遥操作方式获取的真机数据。
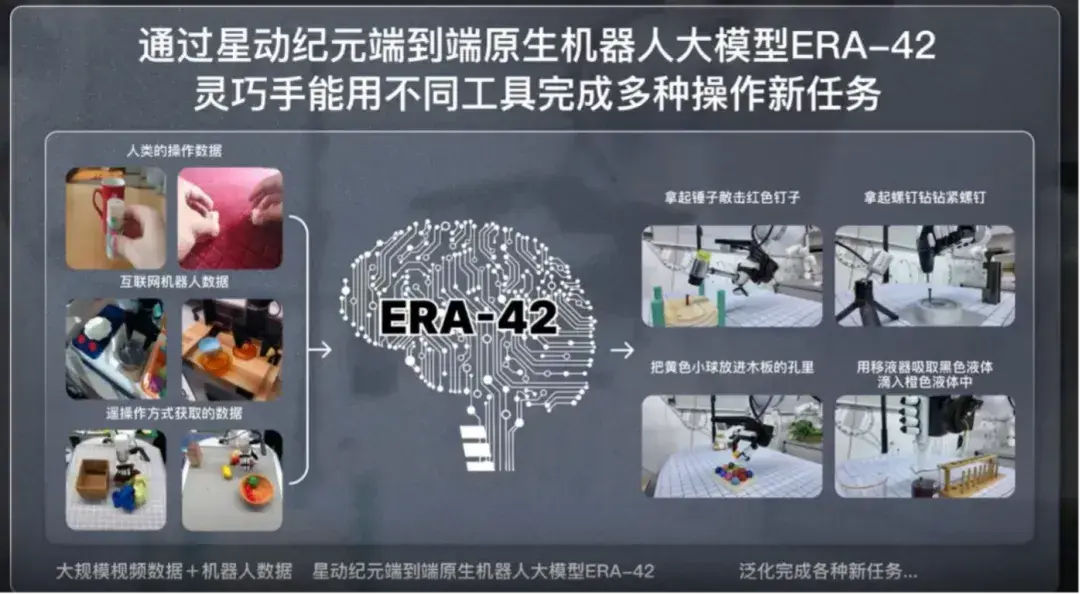
星动纪元机器人大模型ERA-42(图片来源:星动纪元)
四、商业模式
在商业化初期,星动纪元已成功完成面向开发者生态的闭环验证,产品被多家高校、科研机构及科技企业采购,用于技术研发与二次开发,形成稳定的初期商业闭环。据了解,接下来,星动纪元将重点推进工业与服务领域的规模化应用,进一步拓展市场边界,加速实现从技术验证到产业渗透的战略过渡。
据陈建宇介绍,星动纪元有着清晰的商业路径规划:将优先聚焦B端场景落地,无论是工业制造领域的自动化作业,还是服务业中的场景化服务。总之,以B端市场为切入点,逐步渗透并验证商业价值。
1. 商业化路径
星动纪元通过"双轨并行"市场策略,构建了国内外协同、多元场景覆盖的商业化布局。
- 在国内市场,公司深耕具身智能行业解决方案,与吉利、雷诺、顺丰、TCL、海尔、联想、世纪金源等头部企业建立深度合作。其中,在物流领域已实现单笔近五千万元的订单突破,并形成可复制的标准化解决方案,展现出在垂直行业的纵深服务能力。
- 在海外市场,星动纪元以开发者生态为核心突破口,业务已覆盖北美、欧洲、中东和日韩等主要科技区域。目前海外业务贡献了公司总收入的50%,全球市值前十的科技巨头中有九家已成为其客户。
截至目前,星动纪元已完成超200台产品的交付,另有500余台正在量产交付中。通过"国内行业深耕+海外生态拓展"的双轮驱动,公司实现了订单额的快速攀升,2025年订单总额已突破5亿元,展现出可持续的商业化增长路径。
2. 应用场景
目前,星动纪元主要围绕两款机器人产品星动L7和星动Q5展开探索,这也是其核心技术落地方向。
星动纪元人形机器人产品应用场景
1)星动Q5应用落地情况
星动Q5是一款专为服务行业设计的轮式人形机器人,在生活化服务场景中表现出一定优势。它不仅能够完成端茶递水等日常操作,更具备高度拟人化的交互能力,适用于零售、导览、接待等多种服务场合。
其主要应用场景覆盖商场导购、文旅讲解、家庭服务、企业接待、医疗养老以及学校教育。

星动Q5主要应用场景(图片来源:星动纪元)
目前,星动Q5已在海尔、卡萨帝、联想集团、世纪金源等企业,以及大熊猫基地、成都科幻节等公共场所投入应用,承担包括商品介绍、导览讲解、快递配送、门店引流等多样化服务,展现出良好的场景适应性与落地潜力。
2)星动L7应用落地情况
据了解,星动L7是一款严格参照工业级标准设计的全尺寸人形机器人,并采用了模块化设计思路,比如,上半身可以单独拆分为简配版本(星动L7-U),这样能更灵活地适配不同场景的落地需求。
**其主要面向场景:**商业服务、物流场景、制造场景和科研场景。

星动L7主要应用场景(图片来源:星动纪元)
目前,星动L7不仅在首届世界人形机器人运动大会中斩获跳高冠军、打破跳远世界纪录,更在物流、制造等场景中承担供件、分拣、装配与搬运任务,展现出广泛的应用潜力。
而"半身形态"的星动L7-U则在上肢操作场景中的表现突出,尤其在物流分拣、扫码等环节,已通过星动纪元自研的端到端VLA模型实现精准控制,落地效果显著,前景可观。
结语:
当前,人形机器人正加速从演示现场的"炫技"走向真实场景的"干活"。在这一进程中,星动纪元凭借其"模型-本体-场景数据"的闭环飞轮,展现出强劲的发展势头。
在技术层面,星动纪元将加速具身模型技术的研发,并继续迭代【模型- 本体 - 场景数据】物理世界AI飞轮。在商业落地方面,随着吉利资本、北汽产投等产业资本的入驻,公司将打开与汽车、物流等产业深度融合的战略协同空间。
展望未来,星动纪元CEO陈建宇的判断务实而乐观:他认为具身智能赛道最迟在明年内将实现真正意义上的商业化,而更为复杂的家庭场景,预计在3到5年内会取得初步进展。
尽管当前部分场景效率约为人类的70%,且成本仍需优化,但通往通用机器人的征程已经开启,从实验室到千家万户的路径正愈发清晰。
参考资料
1.星动纪元官网
2.VLA模型如何重塑具身智能 ------ 8家国内外典型具身智能VLA模型梳理与分析
https://mp.weixin.qq.com/s/0rxS1g_kSFS_rKEkg9qGBQ
3.星动纪元获近10亿元A+轮融资!吉利资本领投,总订单额破5亿
https://mp.weixin.qq.com/s/_il2Liv8DRr38iaXR0qazw
4.2025世界机器人大会 | 星动纪元陈建宇演讲