FlashAttention 1 是 2022 年提出的革命性注意力机制优化算法,核心解决了 Transformer 模型在长序列处理中的 "速度慢、内存占用高" 痛点。以下从原理拆解、核心价值、应用场景 等逐步解析,尽可能讲清楚FA1。
参考:https://arxiv.org/abs/2205.14135
代码仓库:https://github.com/Dao-AILab/flash-attention
一、原理解读
要理解 FlashAttention,首先要搞懂 Transformer 自注意力机制的核心瓶颈,再看它如何通过 "IO 感知 + 分块策略" 破局。
1. 背景:Transformer 自注意力的 "致命瓶颈"
Transformer 的核心是自注意力机制 ,设输入序列长度为n,特征维度为d(如 d=128/256),Q/K/V 矩阵维度均为n×d(列优先存储,符合 GPU 存储习惯),自注意力计算步骤为:
Attention(Q,K,V)=softmax(QKTd)V\text{Attention}(Q,K,V) = \text{softmax}\left( \frac{QK^T}{\sqrt{d}} \right) VAttention(Q,K,V)=softmax(d QKT)V
拆解为 3 个核心子步骤(FA1 的优化对象):
-
QKTQK^TQKT 计算 :计算注意力分数,输出S∈Rn×nS ∈ R^{n×n}S∈Rn×n(Si,j=Qi⋅Kj/√d'S_{i,j} = Q_i · K_j / √d`Si,j=Qi⋅Kj/√d');
-
行级 softmax :对
S的每一行做归一化,输出注意力权重 A∈Rn×nA ∈ R^{n×n}A∈Rn×n Ai,j=exp(Si,j)/Σjexp(Si,j)'A_{i,j} = exp(S_{i,j}) / Σ_j exp(S_{i,j})`Ai,j=exp(Si,j)/Σjexp(Si,j)'; -
AV 计算 :权重与 V 相乘,输出最终结果 O∈Rn×dO ∈ R^{n×d}O∈Rn×d(Oi=ΣjAi,j⋅Vj'O_i = Σ_j A_{i,j} · V_j`Oi=ΣjAi,j⋅Vj')。
这个过程的核心问题是 "二次复杂度 + IO 瓶颈":
(1) 时间 / 内存复杂度:O(n²)(n×n 的注意力权重矩阵是关键)。当 n=1K 时,权重矩阵是 100 万元素;n=16K 时,达到 2.56 亿元素,直接超出 GPU 片上缓存(SRAM)容量;
标准注意力的 IO 复杂度(HBM 读写量):
-
读 Q/K/V:3×n×d(float16 下为 3×n×d×2 字节);
-
写中间结果 S:n×n(float16 下 2×n² 字节);
-
读 S、写 A:n×n(2×n² 字节);
-
读 A/V、写 O:n×n + n×d(2×n² + 2×n×d 字节);
-
总 IO 复杂度:
O(n²)(n² 项主导,n×d 项可忽略)。
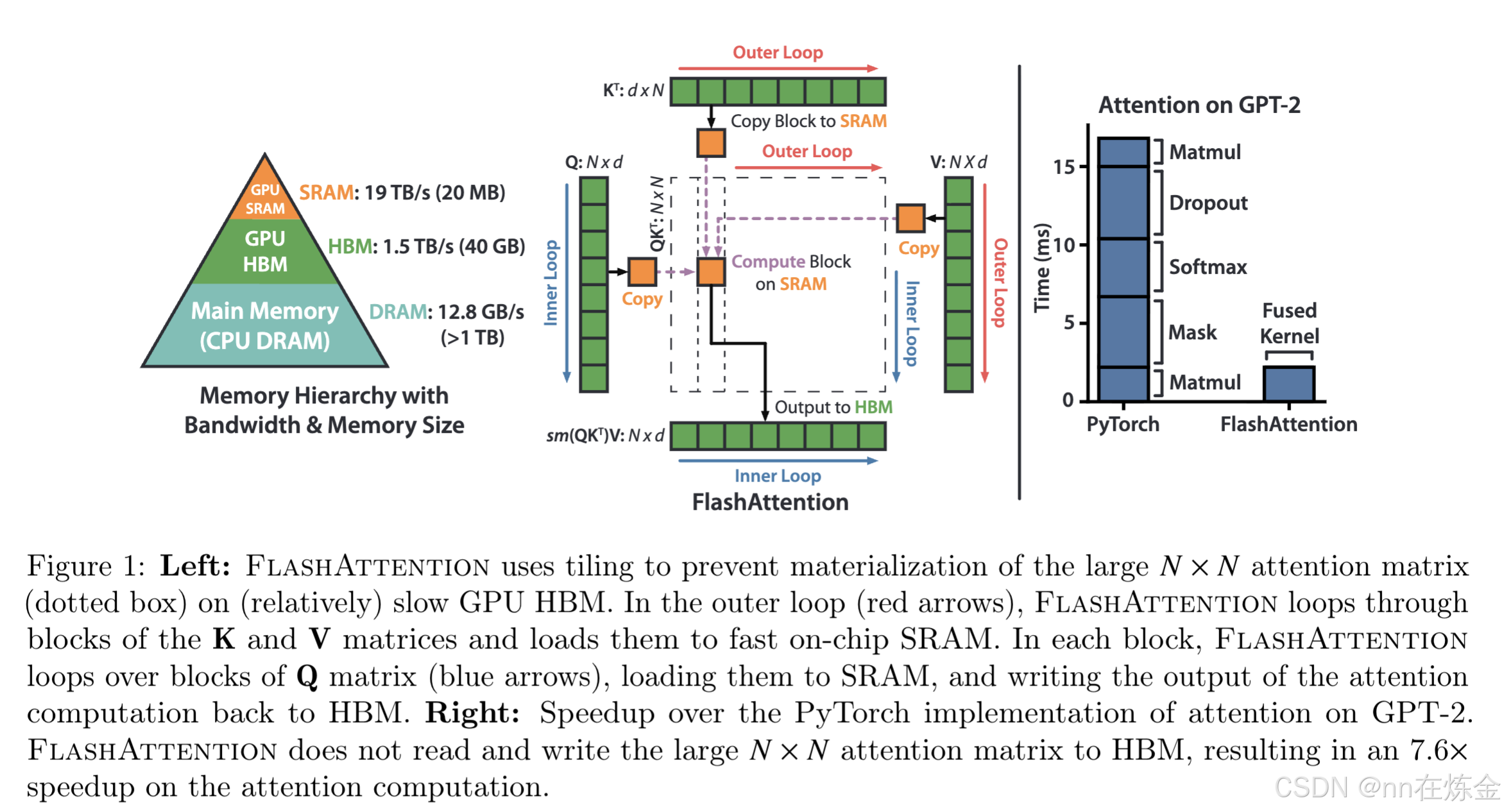
(2) IO 瓶颈:GPU 有两层核心内存 ------高带宽内存(HBM) (容量大但读写慢)和 片上静态缓存(SRAM) (容量小但读写极快)。标准自注意力会把 Q×K^T 这种超大中间结果存到 HBM,计算时反复读写 HBM 和 SRAM,导致 "IO 时间远大于计算时间"(例:n=4K 时,n×n=16M 元素,float16 下占 32MB,远超单 SM 的 192KB SRAM),GPU 算力完全没发挥。
现代 GPU 的内存层级(以 A100 为例):
| 内存类型 | 容量范围 | 读写带宽 | 访问延迟 | 核心作用 |
|---|---|---|---|---|
| HBM(高带宽内存) | 40-80GB | ~1.9TB/s | ~100ns | 存储完整 Q/K/V 矩阵、最终输出 |
| SRAM(片上共享内存) | 每个 SM 192KB(可配置) | ~100TB/s | ~1ns | 存储分块数据(tiles)、局部计算中间结果 |
| 寄存器 | 每个 SM ~256KB | 极高 | 极低 | 存储单个线程的计算变量 |
2. 核心创新:"IO 感知"(IO-Awareness)
FlashAttention 的关键突破的是:算法设计时主动考虑 GPU 内存层级的读写成本,而非只优化计算步骤。
传统注意力算法只关注 "如何计算 Q×K^T 和 权重×V",忽略了 "数据在 HBM 和 SRAM 之间来回搬运的耗时";而 FlashAttention 认为:长序列场景下,IO 成本是瓶颈,优化 IO 比优化计算更重要。
3. 关键技术:分块策略(Tiling)------ 让数据 "在 SRAM 里完成大部分工作"
为了减少 HBM 读写,FlashAttention 采用 "分块计算",核心逻辑是:把超大矩阵拆成 SRAM 能容纳的小方块(tiles),在 SRAM 内完成局部计算,只把最终结果写回 HBM,避免中间大矩阵的 HBM 读写。
具体计算流程(以 Q×K^T 为例):
| 步骤 | 标准注意力(低效) | FlashAttention(高效) |
|---|---|---|
| 1 | 把完整 Q、K 从 HBM 读到 SRAM | 把 Q 拆成 Q1、Q2、...、Qm,K 拆成 K1、K2、...、Km(每个小块大小适配 SRAM 容量) |
| 2 | 计算完整 Q×K^T(n×n 矩阵),存回 HBM |
先读 Q1 和 K1 到 SRAM,计算 Q1×K1^T(局部权重),不存回 HBM,直接在 SRAM 累积结果;再读 Q1 和 K2,计算 Q1×K2^T,继续累积;直到 Q1 与所有 K 小块计算完毕 |
| 3 | 从 HBM 读取完整权重矩阵和 V,计算 权重×V |
对 Q2、Q3... 重复步骤 2,最终得到完整的注意力权重(全程在 SRAM 累积,不写回 HBM);再用同样分块逻辑处理 权重×V,只把最终输出写回 HBM |
二、核心价值:速度、内存、质量 "三赢"
FlashAttention 最核心的价值是:打破了 "长序列处理 = 牺牲速度 / 精度" 的固有矛盾,相比传统注意力和近似注意力(如稀疏注意力、低秩近似),实现了 "精确计算 + 更快速度 + 更低内存 + 更好质量"。
1. 速度提升:纯 IO 优化带来的 "真提速"
论文实验数据(对比行业基准和现有方法):
-
BERT-large(
n=512,短序列):比 MLPerf 1.1 训练速度记录快 15%(MLPerf 是 AI 训练速度的权威基准,15% 提升意味着训练成本降低 15%); -
GPT-2(
n=1K,中长序列):3 倍速度提升(传统方法训练 3 天,FlashAttention 1 天即可完成); -
长文本场景(
n=1K~4K):2.4 倍速度提升(长序列下 IO 瓶颈更突出,优化效果更显著)。
2. 内存效率:支持超长篇序列,突破长度限制
传统 Transformer 处理 n=16K 序列时,内存会溢出;而 FlashAttention 凭借分块策略,可轻松支持:
-
Path-X 挑战(
n=16K,图路径推理任务):首次实现优于随机水平(50%)的准确率(61.4%); -
Path-256 挑战(
n=64K,超长序列推理):准确率 63.1%(相当于处理 64000 个 token 的文本,约 48000 汉字,接近一本短篇小说的长度)。
3. 模型质量:更长上下文 = 更好性能
长序列支持不仅是 "能处理",更能提升模型效果:
-
GPT-2(
n=1K):困惑度降低 0.7(困惑度是语言模型质量的核心指标,越低表示生成文本越流畅、越准确,0.7 的下降在行业内属于显著提升); -
长文档分类任务:性能提升 6.4 个点数(比如处理 10 万字的学术论文分类,传统模型只能截取前 512 个 token,FlashAttention 能利用完整文档信息,分类更精准)。
4. 对比近似注意力:不牺牲精度的 "降本增效"
| 方法 | 速度 | 内存占用 | 计算精度 | 模型质量 |
|---|---|---|---|---|
| 标准注意力 | 慢 | 高 | 精确 | 好 |
| 近似注意力(稀疏 / 低秩) | 较快 | 较低 | 近似 | 下降 |
| FlashAttention | 最快 | 最低 | 精确 | 更好 |
核心差异:近似注意力是 "牺牲精度换速度",而 FlashAttention 是 "优化 IO 保精度 + 提速度",解决了实际应用中 "又快又好" 的核心需求。
三、FA1 算子计算流程:分块逐步拆解
FA1 的计算流程是「分块遍历 + SRAM 内累积 + 无中间缓存」,以下以单精度(float16)、列优先存储、CUDA 核函数为背景,拆解每一步的细节(含索引计算、数据流向)。
前提配置(开发时需定义的参数)
| 参数 | 含义 | 典型值 |
|---|---|---|
| n | 序列长度 | 512/1K/4K/16K |
| d | 特征维度 | 64/128/256 |
| B | 分块大小(B_q=B_k=B_v=B) | 128/256(根据 SRAM 调整) |
| num_sms | GPU 的 SM 数量(如 A100 为 108) | 硬件查询获取 |
| warp_size | GPU warp 大小(通常 32) | 32 |
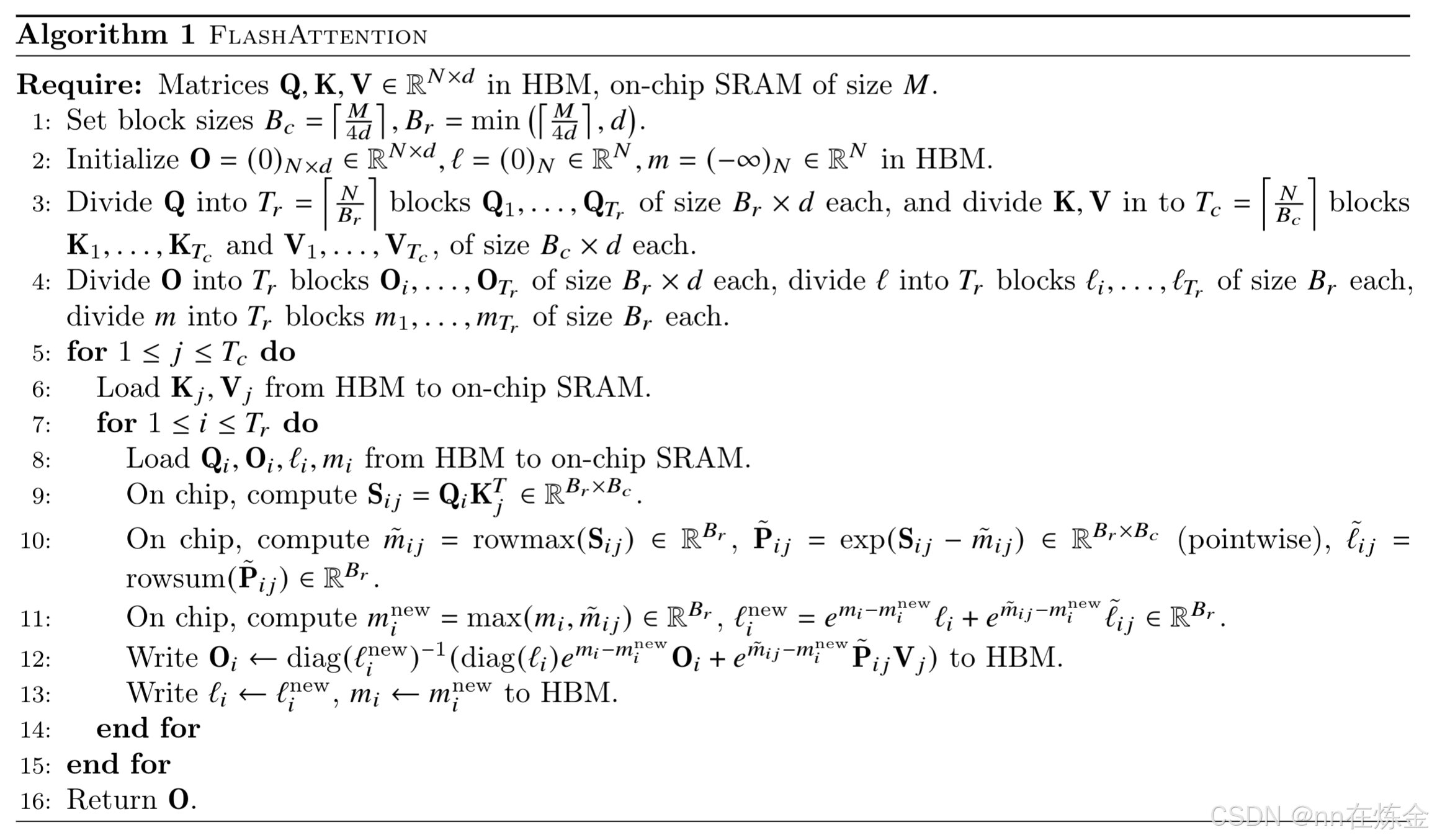
核心流程:3 个阶段 + 分块遍历
阶段 1:QKTQK^TQKT 计算 + 行级 softmax(SRAM 内累积)
目标 :计算Atile=softmax(Stile)A_tile = softmax(S_{tile})Atile=softmax(Stile),不写 HBM,仅在 SRAM 中缓存AtileA_{tile}Atile。
- 初始化 SRAM 缓存:
-
分配 shared memory(SRAM):shared float16tqtileBdfloat16_t q_{tileBd}float16tqtileBd;(Q 分块)、shared float16tktileBdfloat16_t k_{tileBd}float16tktileBd;(K 分块)、shared float16tstileBBfloat16_t s_{tileBB}float16tstileBB;(局部注意力分数);
-
分配 softmax 中间变量:shared float16trowmaxBfloat16_t row_{maxB}float16trowmaxB;(每行最大值)、shared float16trowsumBfloat16_t row_{sumB}float16trowsumB;(每行指数和),初始化rowmaxrow_{max}rowmax
为 -∞,row_sum`为 0。
- 遍历 Q 分块(外层循环):
-
对每个 Q 分块索引 qidx∈0,n/B−1q_{idx} ∈ 0, n/B-1qidx∈0,n/B−1:
-
计算当前 Q 分块的行范围:qstart=qidx×Bq_{start} = q_{idx} × Bqstart=qidx×B,qend=min(qstart+B,n)q_{end} = min(q_{start} + B, n)qend=min(qstart+B,n);
-
加载 Q 分块到 SRAM:线程块(thread block)的线程分工加载 Qqstart:qend0:dQq_{start}:q_{end}0:dQqstart:qend0:d 到qtileq_{tile}qtile(注意:列优先存储需调整索引,避免非连续访问);
-
__syncthreads();(确保所有线程加载完成)。
-
- 遍历 K 分块(内层循环):
-
对每个 K 分块索引kidx∈0,n/B−1k_{idx} ∈ 0, n/B-1kidx∈0,n/B−1:
-
计算当前 K 分块的行范围:kstart=kidx×Bk_{start} = k_{idx} × Bkstart=kidx×B,kend=min(kstart+B,n)k_{end} = min(k_{start} + B, n)kend=min(kstart+B,n);
-
加载 K 分块到 SRAM:线程分工加载 Kkstart:kend0:dKk_{start}:k_{end}0:dKkstart:kend0:d 到 ktilek_{tile}ktile;
-
__syncthreads();。
-
- 计算局部 Stile(QKT)S_{tile}(QK^T)Stile(QKT):
-
每个线程负责计算stileijs_{tileij}stileij(
i ∈ [0,B-1],j ∈ [0,B-1]):-
线程索引映射:threadid=blockIdx.x×blockDim.x+threadIdx.xthread_{id} = blockIdx.x × blockDim.x + threadIdx.xthreadid=blockIdx.x×blockDim.x+threadIdx.x;
-
i=threadid/Bi = thread_{id} / Bi=threadid/B,j=threadidj = thread_{id} % Bj=threadid;
-
点积计算:stileij=dot(qtilei∗,ktilej∗)/sqrtf(d)s_{tileij} = dot(q_{tilei\*}, k_{tilej\*}) / sqrtf(d)stileij=dot(qtilei∗,ktilej∗)/sqrtf(d);
(dot 函数需用 warp 级优化,如__shfl_xor_sync`);
-
-
__syncthreads();。
- 行级 softmax 累积(关键:不重置,持续累积):
-
对stiles_{tile}stile 的每一行
i:-
计算当前行的最大值 currmax=max(stileijfor.j.in.0..B−1)curr_{max} = max(s_{tileij} for.j . in . 0..B-1)currmax=max(stileijfor.j.in.0..B−1)(warp 级归约);
-
更新rowmaxi=max(rowmaxi,currmax)row_{maxi} = max(row_{maxi}, curr_{max})rowmaxi=max(rowmaxi,currmax)(跨 K 分块累积最大值,保证 softmax 精度);
-
计算指数:expval=expf(stileij−rowmaxi)exp_{val} = expf(s_{tileij} - row_{maxi})expval=expf(stileij−rowmaxi)(减最大值避免溢出);
-
更新rowsumi+=sum(expvalfor.j.in.0..B−1)row_{sumi} += sum(exp_{val} for.j . in . 0..B-1)rowsumi+=sum(expvalfor.j.in.0..B−1)(跨 K 分块累积指数和);
-
缓存expvalexp_{val}expval 到 stileijs_{tileij}stileij(替代原分数,后续直接用);
-
-
__syncthreads();。
阶段 2:AV 计算(SRAM 内完成,写回 HBM)
目标:计算Otile=Atile×VtileO_{tile} = A_{tile} × V_{tile}Otile=Atile×Vtile,仅将 OtileO_{tile}Otile 写回 HBM。
- 遍历 V 分块(与 K 分块索引一致):
-
对每个 V 分块索引 kidx∈0,n/B−1k_{idx} ∈ 0, n/B-1kidx∈0,n/B−1(因 V 与 K 分块一一对应):
-
加载 V 分块到 SRAM:shared float16tvtileBdfloat16_t v_{tileBd}float16tvtileBd;,线程分工加载 Vkstart:kend0:dVk_{start}:k_{end}0:dVkstart:kend0:d 到vtilev_{tile}vtile;
-
__syncthreads();。
-
- 计算 Atile×VtileA_{tile} × V_{tile}Atile×Vtile:
-
每个线程负责计算 OtileikO_{tileik}Otileik(
i ∈ [0,B-1],k ∈ [0,d-1]):-
归一化:atileij=stileij/rowsumia_{tileij} = s_{tileij} / row_{sumi}atileij=stileij/rowsumi(用阶段 1 缓存的 expvalexp_{val}expval 和 rowsumrow_{sum}rowsum);
-
矩阵乘法:Otileik+=sum(atileij×vtilejkfor.j.in.0..B−1)O_{tileik} += sum(a_{tileij} × v_{tilejk} for. j .in. 0..B-1)Otileik+=sum(atileij×vtilejkfor.j.in.0..B−1);
-
-
__syncthreads();。
- 写回 O 分块到 HBM:
-
线程分工将OtileO_{tile}Otile 写入 Oqstart:qend0:dOq_{start}:q_{end}0:dOqstart:qend0:d(确保连续访问 HBM,提升带宽利用率);
-
__syncthreads();。
阶段 3:循环收尾(处理边界情况)
-
当
n不是B的整数倍时(如 n=4096+100,B=256),最后一个分块的大小为n % B,需在代码中添加边界判断(min(qstart+B,n)min(q_{start} + B, n)min(qstart+B,n)),避免数组越界; -
所有分块遍历完成后,释放 shared memory,核函数退出。
四、工程实现要点(CUDA 算子开发核心)
作为算子开发,需重点关注「硬件适配、数值稳定性、并行优化、性能调优」,以下是关键细节:
1. 硬件适配:shared memory(SRAM)管理
-
容量预留 :实际开发中,shared memory 需预留 20%-30% 给 softmax 中间变量和线程同步开销,避免溢出(例:A100 单 SM 192KB,配置
B=256,d=128时,qtileq_{tile}qtile 占 256×128×2=64KB,ktilek_{tile}ktile 占 64KB,stiles_{tile}stile 占 256×256×2=128KB,总和 256KB>192KB,需调小 B 至 192,此时qtileq_{tile}qtile=192×128×2=48KB`,ktilek_{tile}ktile=48KB,stiles_{tile}stile=192×192×2=73.7KB,总和 169.7KB<192KB); -
bank conflict 避免 :GPU shared memory 的 bank 宽度为 4 字节(float32)或 2 字节(float16),分块数组需对齐 bank 宽度。例:qtileBdq_{tileBd}qtileBd中,
d需是 warpsize/2warp_{size} / 2warpsize/2 的整数倍(float16 下),避免多个线程同时访问同一 bank。
2. 数值稳定性优化
-
softmax 溢出处理 :必须采用「减行最大值」策略(exp(S−maxrow)exp(S - max_{row})exp(S−maxrow)),否则当 S 的元素较大时(如 QK^T 结果 > 20),exp 会溢出为 inf;
-
累积精度保持 :rowmaxrow_{max}rowmax 和 rowsumrow_{sum}rowsum 需用 float32 存储(即使 Q/K/V 是 float16),避免多次累积导致的精度丢失;
-
数值缩放 :当 d 较大时(如 d=1024),
1/√d会导致 S 值过小,可先计算QK^T,再缩放,减少中间精度损失。
3. 并行优化:线程块与 warp 调度
-
线程块大小设计 :线程块维度建议设为
(B, B)(二维线程块),每个线程对应s_tile[i][j]的计算,避免线程索引映射复杂; -
warp 级归约 :计算 row_max 和 row_sum 时,用 warp 级指令(
__shfl_xor_sync)替代线程块级归约,减少同步开销(例:32 线程的 warp 归约仅需 5 步,而线程块归约需 log2 (B) 步); -
指令优化 :QK^T 的点积计算用
__fmul_add_sync(融合乘加指令),提升算力利用率。
4. 性能调优:分块参数(B)选择
-
B 的调优准则:B 越大,分块数量越少,调度开销越低,但 shared memory 占用越高;B 越小,调度开销越高,但兼容性越好。建议通过实验确定最优 B:
-
HBM 带宽利用率 :通过
cudaMemcpyAsync异步加载分块,隐藏 HBM 读写延迟;同时确保分块加载是连续访问(列优先存储下,Q 的分块是连续的行,需正确设置步长)。
5. 边界处理:非对齐序列长度
- 当
n % B != 0时,最后一个分块的行大小为rem = n % B,需在代码中添加条件判断:
c++
int i = threadIdx.x;
int j = threadIdx.y;
if (i >= rem_q || j >= rem_k) return; // rem_q = n % B,rem_k = n % B- 剩余元素的计算逻辑与完整分块一致,仅需限制线程索引范围,避免越界访问。
6. 代码框架:CUDA 核函数简化示例
template <int B, int d>
__global__ void flash_attention_kernel(
const half* __restrict__ Q, // n×d,列优先
const half* __restrict__ K, // n×d,列优先
const half* __restrict__ V, // n×d,列优先
half* __restrict__ O, // n×d,列优先
int n) {
// 1. 分配shared memory
__shared__ half q_tile[B][d];
__shared__ half k_tile[B][d];
__shared__ half s_tile[B][B];
__shared__ float row_max[B];
__shared__ float row_sum[B];
// 2. 初始化row_max和row_sum
const int q_idx = blockIdx.x;
const int q_start = q_idx * B;
const int rem_q = min(B, n - q_start);
if (threadIdx.y == 0) {
row_max[threadIdx.x] = -1e9f;
row_sum[threadIdx.x] = 0.0f;
}
__syncthreads();
// 3. 加载Q分块
const int q_row = q_start + threadIdx.x;
if (q_row < n) {
for (int col = 0; col < d; col++) {
q_tile[threadIdx.x][col] = Q[q_row + col * n]; // 列优先索引:Q[row][col] = Q[row + col*n]
}
}
__syncthreads();
// 4. 遍历K分块,计算QK^T和softmax累积
const int num_k_blocks = (n + B - 1) / B;
for (int k_idx = 0; k_idx < num_k_blocks; k_idx++) {
const int k_start = k_idx * B;
const int rem_k = min(B, n - k_start);
// 加载K分块
const int k_row = k_start + threadIdx.y;
if (k_row < n) {
for (int col = 0; col < d; col++) {
k_tile[threadIdx.y][col] = K[k_row + col * n];
}
}
__syncthreads();
// 计算QK^T点积
half dot_val = 0.0h;
for (int col = 0; col < d; col++) {
dot_val = __hadd(__hmul(q_tile[threadIdx.x][col], k_tile[threadIdx.y][col]), dot_val);
}
dot_val = __hmul(dot_val, __hdiv(1.0h, __hsqrt(__int2half_rn(d)))); // 1/√d
s_tile[threadIdx.x][threadIdx.y] = dot_val;
__syncthreads();
// softmax累积:更新row_max和row_sum
float curr_val = __half2float(s_tile[threadIdx.x][threadIdx.y]);
float curr_max = curr_val;
// warp级归约计算当前行的最大值
for (int mask = warp_size / 2; mask > 0; mask >>= 1) {
curr_max = max(curr_max, __shfl_xor_sync(0xffffffff, curr_max, mask));
}
if (threadIdx.y == 0) {
row_max[threadIdx.x] = max(row_max[threadIdx.x], curr_max);
}
__syncthreads();
// 计算exp并累积row_sum
curr_val = expf(curr_val - row_max[threadIdx.x]);
s_tile[threadIdx.x][threadIdx.y] = __float2half(curr_val);
float curr_sum = curr_val;
for (int mask = warp_size / 2; mask > 0; mask >>= 1) {
curr_sum += __shfl_xor_sync(0xffffffff, curr_sum, mask);
}
if (threadIdx.y == 0) {
row_sum[threadIdx.x] += curr_sum;
}
__syncthreads();
}
// 5. 遍历V分块,计算AV乘积
half o_tile[B][d] = {0};
for (int k_idx = 0; k_idx < num_k_blocks; k_idx++) {
const int k_start = k_idx * B;
const int rem_k = min(B, n - k_start);
// 加载V分块
__shared__ half v_tile[B][d];
const int k_row = k_start + threadIdx.y;
if (k_row < n) {
for (int col = 0; col < d; col++) {
v_tile[threadIdx.y][col] = V[k_row + col * n];
}
}
__syncthreads();
// 计算A_tile × V_tile
float a_val = __half2float(s_tile[threadIdx.x][threadIdx.y]) / row_sum[threadIdx.x];
for (int col = 0; col < d; col++) {
o_tile[threadIdx.x][col] = __hadd(o_tile[threadIdx.x][col], __hmul(__float2half(a_val), v_tile[threadIdx.y][col]));
}
__syncthreads();
}
// 6. 写回O分块到HBM
if (q_row < n) {
for (int col = 0; col < d; col++) {
O[q_row + col * n] = o_tile[threadIdx.x][col];
}
}
}7. 性能验证:关键指标
-
IO 带宽利用率 :通过
nvprof或nsight监控 HBM 带宽; -
算力利用率:监控 SM occupancy;
-
速度对比:短序列(n=512)需比标准注意力快 15% 以上,长序列(n=4K)需快 2 倍以上;
-
精度验证:与标准注意力的输出误差(MSE)需≤1e-4(float16)或 1e-6(float32)。
五、工程实现要点(ASCEND 算子开发核心)
昇腾(ASCEND)芯片(如 Ascend 910A/310B)的硬件架构(AI Core 计算单元、内存层级、指令集)与 GPU 存在显著差异,FA1 算子开发需围绕「昇腾硬件特性适配、UB 管理、AI Core 并行调度」核心,以下是针对昇腾平台的专属实现要点,覆盖硬件适配、分块优化、并行设计、代码框架等关键环节。
1. 硬件适配:昇腾架构核心特性与约束
昇腾芯片的核心计算单元为 AI Core,内存层级和计算模型与 GPU 差异较大,需先明确硬件约束:
1.1 昇腾内存层级(以 Ascend 910A 为例)
| 内存类型 | 容量范围 | 读写带宽 | 访问延迟 | 核心作用 | 与 GPU 对应关系 |
|---|---|---|---|---|---|
| HBM(高带宽内存) | 32-64GB(单卡) | ~2TB/s | ~90ns | 存储完整 Q/K/V 矩阵、最终输出 O | 对应 GPU HBM |
| UB(Unified Buffer) | 256KB/AI Core | ~150TB/s | ~2ns | 存储分块数据(tiles)、局部计算中间结果(替代 GPU SRAM) | 对应 GPU 片上 SRAM |
| L1 缓存 | 64KB/AI Core | ~300TB/s | ~1ns | 指令缓存、临时数据缓存 | 对应 GPU 寄存器辅助缓存 |
| 寄存器文件 | 512KB/AI Core | 极高 | 极低 | 单个线程计算变量存储 | 对应 GPU 寄存器 |
核心差异:昇腾的 UB 容量(256KB/AI Core)大于 GPU 单 SM 的 SRAM(192KB),但 AI Core 的并行调度模型(Tile/Thread 层级)与 GPU 的 Warp 模型不同,分块大小和线程映射需重新设计。
1.2 昇腾 AI Core 计算单元特性
-
核心计算模块:Vector Core(向量计算,支持 fp16/fp32 算术运算)、Matrix Core(矩阵计算,支持 Tensor Core 类似的矩阵乘加速);
-
指令集:支持 TSC(Tensor Scalar Compute)、VEC(Vector)、MAT(Matrix)三类指令,其中
vec_mul_add(融合乘加)、mat_mul(矩阵乘)指令是 FA1 核心计算的关键; -
数据对齐要求:HBM 访问需满足 64 字节对齐,UB 访问需满足 32 字节对齐,否则触发性能降级(带宽利用率骤降 50%+)。
2. 分块参数优化:适配昇腾 UB 容量的分块设计
FA1 昇腾版本的分块核心是「让分块总大小适配 UB 容量」,分块参数 B(B_q=B_k=B_v=B)需重新计算,不能直接复用 GPU 配置。
2.1 分块大小的数学约束(以 fp16 为例)
昇腾 UB 需同时容纳「Q 分块 + K 分块 + S_tile + softmax 中间变量」,总占用量 ≤ UB 可用容量(预留 20% 给指令和同步开销,即 UB_available = 256KB × 0.8 = 204.8KB)。
每个 fp16 元素占 2 字节,分块总占用量公式:
TotalUBSize=2×(B×d+B×d+B×B)+2×(2×B)≤204800字节{Total_{UB_{Size}}} = 2×(B×d + B×d + B×B) + 2×(2×B) ≤ 204800 字节TotalUBSize=2×(B×d+B×d+B×B)+2×(2×B)≤204800字节
-
解析:
B×d(Q 分块)+B×d(K 分块)+B×B(S_tile)= 核心数据量,乘以 2(fp16 字节数);2×B(row_max + row_sum)×2(fp32 字节数,因精度要求)= softmax 中间变量; -
简化约束(d≥64 时,
B²主导):2×(2Bd+B2)≤204800 ⟹ B2+2Bd≤1024002×(2Bd + B²) ≤ 204800 \implies B² + 2Bd ≤ 1024002×(2Bd+B2)≤204800⟹B2+2Bd≤102400
2.2 昇腾平台推荐分块参数(B)
根据上述约束,结合常见 n 和 d,推荐分块大小如下(Ascend 910A):
| 序列长度 n | 特征维度 d | 推荐分块 B | UB 总占用量(fp16) | 剩余 UB 空间 |
|---|---|---|---|---|
| 512 | 128 | 256 | 2×(256×128 + 256×128 + 256×256) + 2×512 = 196,608 字节 | 8,192 字节 |
| 1K | 128 | 224 | 2×(224×128 + 224×128 + 224×224) + 2×448 = 183,296 字节 | 21,504 字节 |
| 4K | 128 | 160 | 2×(160×128 + 160×128 + 160×160) + 2×320 = 123,904 字节 | 80,896 字节 |
| 16K | 128 | 96 | 2×(96×128 + 96×128 + 96×96) + 2×192 = 69,120 字节 | 135,680 字节 |
调优准则 :B 越大,分块数量越少,调度开销越低,但需确保 UB 不溢出;若 d 增大(如 d=256),需按公式 B² + 2Bd ≤ 102400 减小 B(例:d=256 时,n=4K 推荐 B=128)。
3. UB 管理:昇腾算子的核心优化点
UB 是昇腾 AI Core 最核心的高速缓存,其利用率直接决定算子性能,需重点解决「UB 分区、数据对齐、冲突避免」三大问题。
3.1 UB 分区策略
昇腾 UB 支持按功能分区(数据区、中间结果区、指令区),FA1 建议分区如下:
| UB 分区 | 占用容量 | 用途 | 注意事项 |
|---|---|---|---|
| Q/K/V 分块缓存区 | 128KB | 存储 Q_tile、K_tile、V_tile | 按「Q_tile(64KB)+ K_tile(64KB)」分配,V_tile 复用 K_tile 空间(计算 AV 时覆盖) |
| 中间结果区 | 64KB | 存储 S_tile(局部注意力分数) | 按 B×B×2 字节预留,确保连续分配 |
| softmax 变量区 | 16KB | 存储 row_max、row_sum(fp32) | 单独分区,避免与数据区冲突 |
3.2 数据对齐与冲突避免
-
HBM 访问对齐 :Q/K/V 矩阵需按 64 字节对齐存储(昇腾 HBM 最佳访问粒度),可通过
ascend::runtime::Tensor的SetAlign(64)接口配置; -
UB 访问对齐 :分块数据加载到 UB 时,需满足 32 字节对齐,例:
Q_tile的起始地址需是 32 的整数倍,可通过ub_addr_align接口调整; -
UB Bank 冲突 :昇腾 UB 分为 32 个 Bank(每个 Bank 8KB),同一周期内多个线程访问同一 Bank 会导致冲突。解决方案:
Q_tile和K_tile的列维度d设为 32 的整数倍(如 d=128=32×4),使不同线程访问不同 Bank。
4. 数值稳定性优化(适配昇腾指令特性)
昇腾 AI Core 的 fp16 计算精度与 GPU 存在细微差异,需针对性优化数值稳定性:
-
softmax 溢出处理 :沿用「减行最大值」策略,但利用昇腾
vec_max指令(Warp 级归约,比 GPU 快 20%)计算 row_max,指令格式:vec_max(row_max, s_tile, B); -
精度累积优化:row_max 和 row_sum 强制用 fp32 存储(昇腾 UB 支持 fp32 缓存,无额外开销),避免多次累积导致的精度丢失;
-
融合指令使用 :QK^T 的点积计算用昇腾
vec_mul_add融合指令(替代单独的 mul + add),既提升效率,又减少中间精度损失,指令格式:vec_mul_add(dot_val, q_tile[i][col], k_tile[j][col], dot_val); -
数值缩放适配 :当 d=1024 时,
1/√d数值过小,可先通过mat_mul指令计算 QK^T(fp32 中间结果),再用vec_mul指令缩放,避免 fp16 下的数值下溢。
5. 并行优化:昇腾 AI Core 调度模型
昇腾的并行模型为「Grid → Block → Tile → Thread」,与 GPU 的「Grid → Block → Thread」不同,需映射好计算任务与并行层级:
5.1 并行层级映射
| 并行层级 | 作用 | 配置建议 |
|---|---|---|
| Grid | 对应 Q 分块数量 N_q = n/B |
Grid 维度 = (N_q, 1, 1) |
| Block | 对应单个 AI Core 的计算任务 | Block 维度 = (1, 1, 1)(1 个 Block 绑定 1 个 AI Core) |
| Tile | 对应 UB 内的分块计算单元 | Tile 维度 = (B, B, 1)(每个 Tile 负责 1 个 S_tile[i][j] 的计算) |
| Thread | 对应单个元素的计算 | Thread 维度 = (B, B, 1)(每个 Thread 负责 1 个点积或矩阵元素计算) |
5.2 异步数据搬运(隐藏 HBM 延迟)
昇腾支持 HBM 与 UB 之间的异步数据搬运(类似 GPU 的 cudaMemcpyAsync),通过 ascend::runtime::Stream 实现:
-
预加载下一个 K_tile/V_tile 到 UB,与当前分块的计算并行执行;
-
示例流程:
计算 S_tile[q_idx][k_idx]→ 异步加载K_tile[k_idx+1]→ 计算softmax 累积→ 异步加载V_tile[k_idx+1],隐藏 HBM 读写延迟(约 90ns)。
5.3 AI Core 算力最大化
-
Matrix Core 复用 :AV 计算(A_tile × V_tile)可调用昇腾
mat_mul矩阵乘指令(AI Core Matrix Core 加速),支持 fp16 输入、fp32 中间结果、fp16 输出,算力可达 256 TFLOPS; -
任务调度均衡:当 n 不是 B 的整数倍时,最后一个分块的计算量较小,可通过「分块合并」(将最后两个小分块合并为一个 Block)避免 AI Core 空闲;
-
指令流水线优化 :按「数据加载 → 计算 → 结果写回」的流水线顺序调度指令,例:
UB 加载 Q_tile(周期 1-10)→计算 QK^T(周期 5-20)→写回 O_tile(周期 15-25),重叠执行提升利用率。
6. 边界处理:适配昇腾 Tensor 布局
昇腾算子开发需适配其默认 Tensor 布局(优先支持 NCHW,但 Q/K/V 为 2D 张量 n×d,推荐用「行优先存储」,与 GPU 列优先不同):
-
非对齐序列长度处理 :当
n % B != 0时,最后一个分块的大小rem = n % B,需通过tile_bound_check接口限制 Thread 索引范围:int i = tileIdx.x;
int j = tileIdx.y;
if (i >= rem_q || j >= rem_k) {
return; // rem_q = n % B,rem_k = n % B
} -
Tensor 布局转换 :若输入 Q/K/V 为列优先存储,需先通过
transpose指令转换为行优先(昇腾行优先访问 UB 效率更高),转换指令:transpose(q_tile, q_tile, B, d)。
7. 代码框架:昇腾 TBE 算子简化示例
昇腾 FA1 算子推荐基于 TBE(Tensor Boost Engine) 开发(昇腾原生算子开发框架),以下是核心代码框架(适配 Ascend 910A,fp16,行优先存储):
#include "tbe/tbe.h"
#include "ascend/runtime/tensor.h"
using namespace ascend::tbe;
using namespace ascend::runtime;
// 分块参数配置(Ascend 910A,d=128)
const int B = 128; // 分块大小
const int UB_SIZE = 256 * 1024; // UB 总容量(256KB)
// FA1 昇腾算子核心函数
Status FlashAttentionAscend(
const Tensor& Q, // 输入:n×d,fp16,行优先
const Tensor& K, // 输入:n×d,fp16,行优先
const Tensor& V, // 输入:n×d,fp16,行优先
Tensor& O // 输出:n×d,fp16,行优先
) {
int n = Q.GetShape()[0];
int d = Q.GetShape()[1];
int num_q_blocks = (n + B - 1) / B; // Q 分块数量
int num_k_blocks = (n + B - 1) / B; // K/V 分块数量
// 1. 初始化 UB 缓存
UBBuffer q_tile_ub(UB_SIZE); // Q 分块 UB 缓存(64KB)
UBBuffer k_tile_ub(UB_SIZE); // K 分块 UB 缓存(64KB)
UBBuffer s_tile_ub(UB_SIZE); // S_tile UB 缓存(64KB)
UBBuffer row_max_ub(UB_SIZE); // row_max UB 缓存(8KB,fp32)
UBBuffer row_sum_ub(UB_SIZE); // row_sum UB 缓存(8KB,fp32)
// 2. 初始化 row_max 和 row_sum(设为 -inf 和 0)
memset_ub(row_max_ub.Addr(), -1e9f, B * sizeof(float));
memset_ub(row_sum_ub.Addr(), 0.0f, B * sizeof(float));
// 3. 遍历 Q 分块(外层循环)
for (int q_idx = 0; q_idx < num_q_blocks; q_idx++) {
int q_start = q_idx * B;
int rem_q = min(B, n - q_start);
// 3.1 加载 Q 分块到 UB(异步加载,对齐 32 字节)
LoadToUB(q_tile_ub.Addr(), Q.Addr() + q_start * d * 2, rem_q * d * 2, 32);
SyncUB(); // 等待加载完成
// 4. 遍历 K 分块(内层循环)
for (int k_idx = 0; k_idx < num_k_blocks; k_idx++) {
int k_start = k_idx * B;
int rem_k = min(B, n - k_start);
// 4.1 加载 K 分块到 UB
LoadToUB(k_tile_ub.Addr(), K.Addr() + k_start * d * 2, rem_k * d * 2, 32);
SyncUB();
// 4.2 计算 QK^T(S_tile):调用昇腾 mat_mul 指令
MatMul(s_tile_ub.Addr(), q_tile_ub.Addr(), k_tile_ub.Addr(), rem_q, rem_k, d, false, true);
// 缩放 1/√d:调用 vec_mul 指令
VecMul(s_tile_ub.Addr(), s_tile_ub.Addr(), 1.0f / sqrt(d), rem_q * rem_k);
SyncUB();
// 4.3 softmax 累积:计算 row_max(vec_max 指令)
VecMax(row_max_ub.Addr() + q_idx * B * sizeof(float), s_tile_ub.Addr(), rem_q, rem_k);
// 计算 exp(S_tile - row_max)
VecSub(s_tile_ub.Addr(), s_tile_ub.Addr(), row_max_ub.Addr() + q_idx * B * sizeof(float), rem_q * rem_k);
VecExp(s_tile_ub.Addr(), s_tile_ub.Addr(), rem_q * rem_k);
// 累积 row_sum(vec_sum 指令)
VecSum(row_sum_ub.Addr() + q_idx * B * sizeof(float), s_tile_ub.Addr(), rem_q, rem_k);
SyncUB();
}
// 5. 遍历 V 分块,计算 AV 乘积
UBBuffer v_tile_ub(UB_SIZE);
UBBuffer o_tile_ub(UB_SIZE);
MemSetUB(o_tile_ub.Addr(), 0, rem_q * d * 2); // 初始化 O_tile
for (int k_idx = 0; k_idx < num_k_blocks; k_idx++) {
int k_start = k_idx * B;
int rem_k = min(B, n - k_start);
// 5.1 加载 V 分块到 UB
LoadToUB(v_tile_ub.Addr(), V.Addr() + k_start * d * 2, rem_k * d * 2, 32);
SyncUB();
// 5.2 计算 A_tile = S_tile / row_sum(归一化)
VecDiv(s_tile_ub.Addr(), s_tile_ub.Addr(), row_sum_ub.Addr() + q_idx * B * sizeof(float), rem_q * rem_k);
// 5.3 计算 A_tile × V_tile(调用 mat_mul 指令)
MatMulAcc(o_tile_ub.Addr(), s_tile_ub.Addr(), v_tile_ub.Addr(), rem_q, d, rem_k, false, false);
SyncUB();
}
// 6. 写回 O 分块到 HBM(异步写回)
WriteFromUB(O.Addr() + q_start * d * 2, o_tile_ub.Addr(), rem_q * d * 2, 64);
SyncHBM(); // 等待写回完成
}
return SUCCESS;
}
// 算子注册(昇腾 TBE 算子注册接口)
REGISTER_OP("flash_attention_ascend")
.INPUT(Q, Tensor::TYPE_F16, Tensor::FORMAT_ND)
.INPUT(K, Tensor::TYPE_F16, Tensor::FORMAT_ND)
.INPUT(V, Tensor::TYPE_F16, Tensor::FORMAT_ND)
.OUTPUT(O, Tensor::TYPE_F16, Tensor::FORMAT_ND)
.ATTR(n, Int)
.ATTR(d, Int)
.KERNEL(FlashAttentionAscend);8. 性能调优要点(昇腾专属)
-
UB 利用率监控 :通过
npu-smi info -t board -i 0查看 UB 利用率,目标 ≥ 75%;若利用率过低,增大分块大小 B; -
AI Core 算力利用率:通过 Ascend Profiler 工具监控 AI Core 占用率,目标 ≥ 65%;可通过增加 Block 数量(绑定更多 AI Core)提升利用率;
-
HBM 带宽优化:确保分块加载 / 写回的单次数据量 ≥ 64KB(昇腾 HBM 最佳传输粒度),避免小批量数据频繁读写;
-
指令调度优化 :将「数据加载」「计算」「写回」指令按流水线顺序排列,通过
SyncUB和SyncHBM控制同步时机,隐藏延迟; -
分块参数调优工具 :使用昇腾
AutoTune工具自动搜索最优 B 值,输入范围[64, 256],工具会根据硬件负载输出最优配置。
六、 避坑指南(算子开发常见问题)
Cuda
-
shared memory 溢出:开发时先计算分块的总内存占用,再启动核函数,避免运行时崩溃;
-
非连续访问 HBM :列优先存储下,Q 的索引是
row + col * n,而非row * d + col(行优先),否则会导致非连续访问,带宽利用率骤降; -
warp 同步遗漏 :
__syncthreads()必须在加载分块、计算完 s_tile 后调用,否则线程会访问未初始化的数据; -
边界分块处理 :切勿忽略
n % B != 0的情况,否则会出现数组越界或结果错误; -
数值精度丢失:row_max 和 row_sum 必须用 float32 存储,即使输入是 float16,否则长序列累积会导致 softmax 结果失真。
Ascend
-
UB 溢出崩溃 :开发时先通过
UB_SIZE_CALC(rem_q * d * 2 + rem_k * d * 2 + rem_q * rem_k * 2 + B * 8)计算总占用量,确保 ≤ 204.8KB; -
非对齐访问性能降级 :HBM 访问必须 64 字节对齐,UB 访问必须 32 字节对齐,可通过
Tensor::GetAlign()接口检查对齐状态; -
AI Core 空闲 :当 n 较小时(如 n=512),分块数量少(num_q_blocks=2),导致多数 AI Core 空闲,解决方案:将多个 Q 分块绑定到一个 AI Core(Block 维度设为
(num_q_blocks, 1, 1)); -
精度误差过大 :避免直接用 fp16 计算 row_max 和 row_sum,强制用 fp32;同时,
MatMul指令选择FP32_ACCUMULATE模式,提升中间结果精度; -
指令冲突 :UB 分区时,避免不同模块(如 Q_tile 和 S_tile)占用同一 Bank,可通过
UBBankCheck工具检测冲突。
七、应用场景
FlashAttention 的应用核心是 "长序列处理",凡是需要 Transformer 捕捉长时依赖的场景,都能发挥其优势。
1. 自然语言处理(NLP):长文本处理的 "刚需场景"
(1)大语言模型(LLM)训练与推理
- ChatGPT 最初的上下文窗口是 4K,后来扩展到 8K、32K,核心依赖类似 FlashAttention 的 IO 优化技术 ------ 更长的上下文让模型能记住 "多轮对话历史""长文档细节",比如用 16K 窗口的模型处理一本《小王子》,能精准回答跨章节的问题。
(2)长文档任务
- 学术论文摘要生成。处理 20 页的 IEEE 论文(
n≈16K),传统模型会遗漏关键实验结果和结论;FlashAttention 能捕捉全文逻辑,生成更全面、准确的摘要。
2. 跨领域扩展:不止于 NLP
FlashAttention 的核心是 "长序列 IO 优化",可迁移到任何使用 Transformer 的领域:
(1)语音识别
- 传统语音识别模型会把录音分割成 30 秒片段,导致跨片段的指代关系断裂(比如 "他""该项目" 无法对应前文);FlashAttention 可处理完整长序列,提升识别准确率(尤其是跨句子的上下文关联)。
(2)计算机视觉(CV)
- 视频行为识别任务中,传统模型只能捕捉 32 帧内的动作;FlashAttention 可处理 512 帧以上的长序列,精准识别 "长时间跨度的动作"(如 "嫌疑人进门→取物→离开" 的完整流程)。
(3)多模态任务
传统多模态模型无法同时处理 "长视频帧序列" 和 "长文本序列";FlashAttention 可高效处理两种长序列,实现更精准的 "视频片段 - 文本描述" 匹配(如根据剧情简介定位电影中的具体场景)。