ISP流水线核心模块深度解析
本文档旨在为ISP(Image Signal Processor)流水线中的关键处理模块提供详尽的理论背景与功能解析。我们将深入探讨每个模块的物理意义、数学模型、常见算法及其优缺点。
为了直观演示算法效果,我们提供了以下静态对比图(由Python脚本自动生成)。
1. 亮度调整 (Luminance Adjustment)
1.1 物理背景与必要性
人眼对光强的感知是非线性的,遵循 韦伯-费希纳定律 (Weber-Fechner Law)。然而,CMOS图像传感器(CIS)输出的原始RAW数据通常是线性的。必须进行Gamma校正,将线性数据映射到非线性空间,以匹配人眼感知或显示器特性。
1.2 效果演示
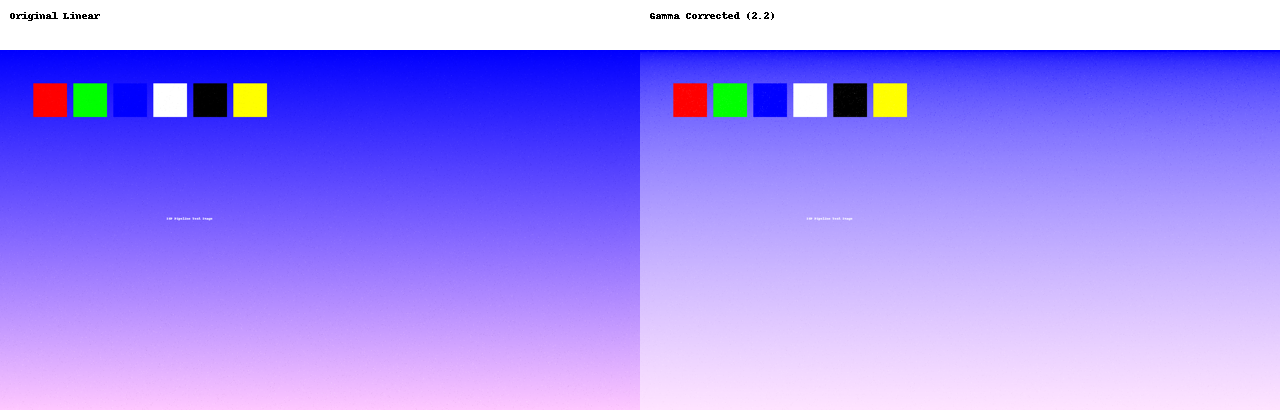
下图展示了Gamma校正(γ=2.2\gamma=2.2γ=2.2)的效果。可以看到,线性原图(左)显得非常暗,而校正后(右)暗部细节被显著提亮。
1.3 核心算法详解
1.3.1 Gamma 校正 (Gamma Correction)
- 数学模型 :
Vout=A⋅Vinγ V_{out} = A \cdot V_{in}^{\gamma} Vout=A⋅Vinγ
通常取 γ≈1/2.2≈0.45\gamma \approx 1/2.2 \approx 0.45γ≈1/2.2≈0.45。
1.3.2 直方图均衡化 (Histogram Equalization, HE)
HE通过拉伸直方图来增强全局对比度,最大化图像的熵。
2. 色彩处理 (Color Processing)
2.1 白平衡与饱和度
- 白平衡 (WB): 消除光源色温影响,还原物体真实颜色。
- 饱和度增强: 提升色彩鲜艳度,使图像更讨好眼球。
2.2 效果演示
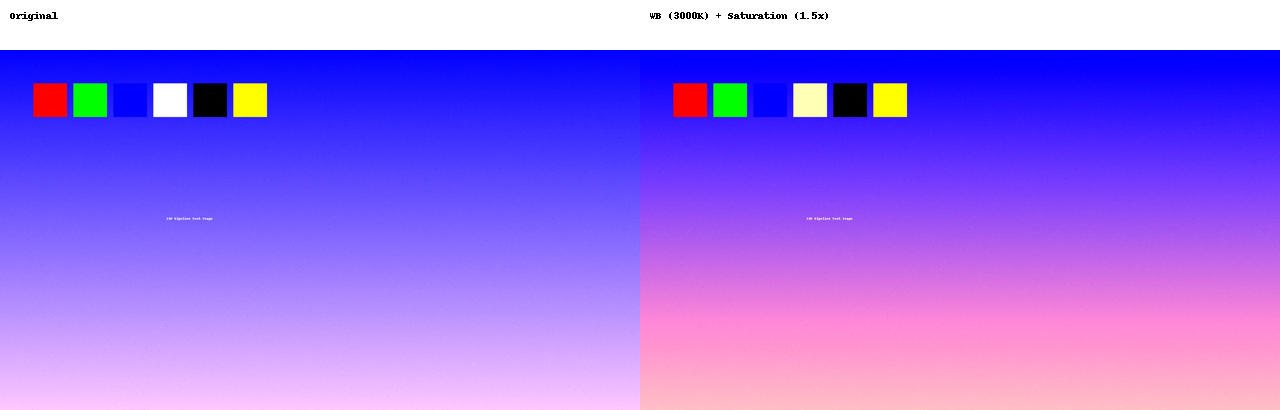
下图模拟了将色温调整到3000K(偏暖)并增加1.5倍饱和度的效果。
2.3 核心算法
- 冯·克里斯假说: 独立调整R、G、B增益。
- CCM (Color Correction Matrix) : 3×33 \times 33×3 矩阵校正Sensor光谱响应偏差。
3. 降噪处理 (Noise Reduction)
3.1 噪声模型
图像噪声主要来源于光子散粒噪声(Shot Noise)和读出噪声(Read Noise)。
3.2 效果演示
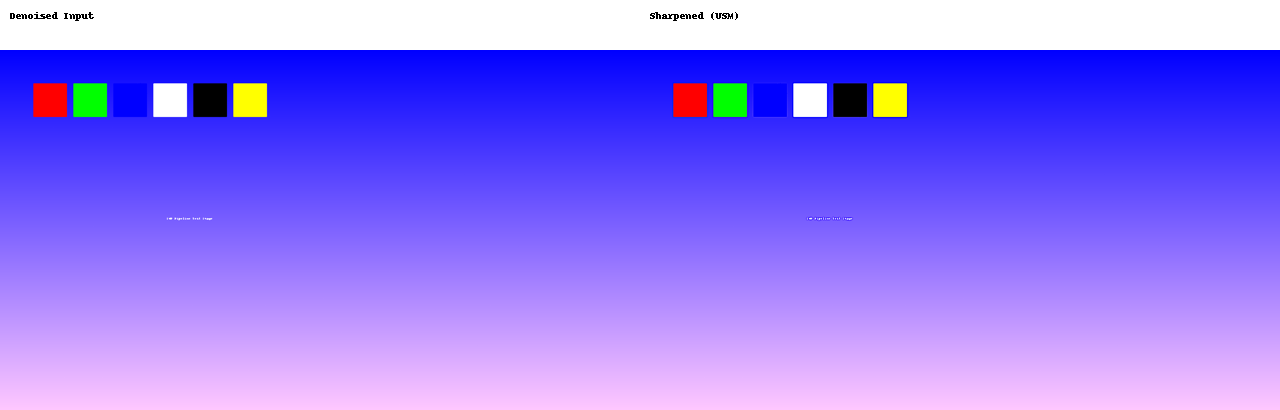
下图展示了使用中值滤波(Median Filter)去除椒盐噪声的效果。可以看到噪点被有效滤除,同时边缘保持相对清晰。

3.3 核心算法
- 中值滤波: 非线性滤波,对椒盐噪声极有效。
- 双边滤波 (Bilateral Filter): 结合空间距离和像素值差异,实现保边去噪。
- 非局部均值 (NLM): 利用全图相似块进行去噪,效果更佳。
4. 锐化增强 (Sharpening)
4.1 原理:反差增强
由于镜头的光学低通特性和去马赛克插值,原始图像往往显得"肉"(Soft)。锐化旨在增强边缘反差。
4.2 效果演示
下图展示了非锐化掩模(USM)的效果。注意观察文字和边缘部分,清晰度有显著提升。
4.3 核心算法:非锐化掩模 (USM)
Sharpened=Original+λ⋅(Original−GaussianSmooth(Original)) \text{Sharpened} = \text{Original} + \lambda \cdot (\text{Original} - \text{GaussianSmooth}(\text{Original})) Sharpened=Original+λ⋅(Original−GaussianSmooth(Original))
通过叠加高频分量来增强边缘。
5. 对比度优化 (Contrast Enhancement)
5.1 全局 vs 局部
对比度优化旨在拉伸图像的动态范围,使"亮部更亮,暗部更暗",增加图像的通透感。
5.2 效果演示
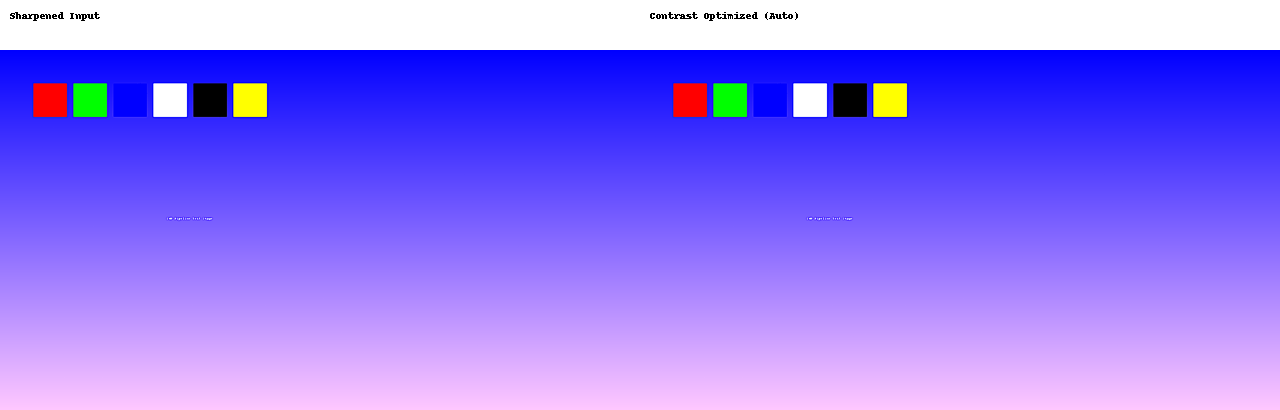
下图展示了自动对比度(Autocontrast)的效果,直方图被拉伸至全范围,图像不再灰蒙蒙。
5.3 自适应直方图均衡化 (CLAHE)
限制对比度的自适应直方图均衡化,解决了普通HE带来的噪声放大问题,是目前最常用的对比度增强算法之一。