因旧物理机设备太差,现将训练一半的数据、程序等迁移至新设备继续训练。
一、虚拟环境打包
1. 确定环境
bash
conda env list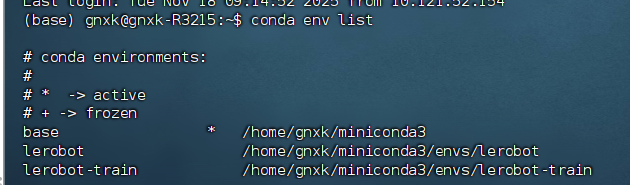
2. 安装conda-pack工具
使用conda或者pip安装:
bash
pip install conda-pack安装完成后,可在终端执行conda pack -h 验证是否安装成功
3. 打包环境
bash
conda pack -n xxx -o xxx.tar.gz如果报下面错误:
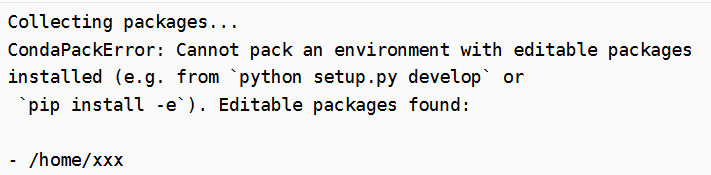
改用下面:
bash
conda pack -n xxx -o xxx.tar.gz --ignore-editable-packagesps:该部分是在旧物理机上操作,下面都是在新设备上进行。
二、Miniconda安装
1. 在官网下载Miniconda安装脚本
bash
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh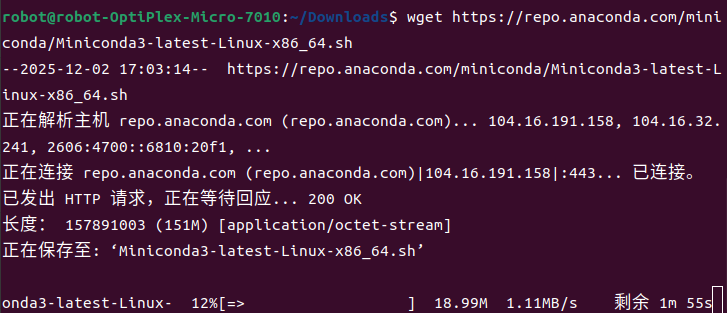
2.运行脚本进行安装
bash
bash Miniconda3-latest-Linux-x86_64.sh3. 重启终端进行验证
bash
conda --version # 输出类似"conda 25.9.1"三、虚拟环境迁移
1. 进入虚拟环境目录
bash
cd ~/miniconda3/envs2. 创建同名文件夹
bash
mkdir xxx3. 解压
bash
tar -zxvf xxx.tar.gz -C xxx4. 验证迁移结果
bash
conda env list