自动泊车最优路径代码matlab,使用rrt算法寻找路径加reeds曲线泊车入库,调用maplayer处理场景。
在自动驾驶领域,自动泊车是一个极具挑战性但又非常实用的功能。今天咱就来讲讲如何利用 MATLAB 实现基于 RRT 算法寻找路径并结合 Reeds 曲线完成泊车入库,同时调用 maplayer 处理场景。
RRT 算法基础
RRT(快速探索随机树)算法是一种常用于路径搜索的算法。它通过在状态空间中随机采样点,并将这些点逐步连接起来构建一棵树,从而找到从起始点到目标点的路径。
在 MATLAB 里实现 RRT 算法,基本框架代码如下:
matlab
% 初始化参数
start = [0, 0]; % 起始点
goal = [10, 10]; % 目标点
obstacles = [2, 2, 1; 5, 5, 1]; % 障碍物,格式为[x, y, radius]
step_size = 0.5;
max_iter = 1000;
% 初始化树
tree = struct('parent', [], 'node', []);
tree(1).parent = 0;
tree(1).node = start;
for iter = 1:max_iter
% 随机采样点
rand_point = [rand * 15, rand * 15];
% 找到树中距离随机点最近的节点
nearest_index = find_nearest_node(tree, rand_point);
nearest_node = tree(nearest_index).node;
% 从最近节点向随机点延伸
new_node = extend(nearest_node, rand_point, step_size);
% 检查新节点是否与障碍物碰撞
if ~check_collision(new_node, obstacles)
new_index = length(tree) + 1;
tree(new_index).parent = nearest_index;
tree(new_index).node = new_node;
% 检查是否接近目标点
if norm(new_node - goal) < step_size
% 找到了路径,进行回溯
path = trace_path(tree, new_index);
break;
end
end
end
function index = find_nearest_node(tree, point)
distances = arrayfun(@(x) norm(tree(x).node - point), 1:length(tree));
[~, index] = min(distances);
end
function new_node = extend(nearest_node, rand_point, step_size)
direction = rand_point - nearest_node;
direction = direction / norm(direction);
new_node = nearest_node + direction * step_size;
end
function collision = check_collision(node, obstacles)
collision = false;
for i = 1:size(obstacles, 1)
if norm(node - obstacles(i, 1:2)) < obstacles(i, 3)
collision = true;
break;
end
end
end
function path = trace_path(tree, end_index)
path = [];
current_index = end_index;
while current_index ~= 0
path = [tree(current_index).node; path];
current_index = tree(current_index).parent;
end
end代码分析
- 初始化部分:定义了起始点、目标点、障碍物信息、步长以及最大迭代次数,同时初始化了树结构。这个树结构将用来保存路径搜索过程中的节点信息。
- 主循环部分:在每次迭代中,首先随机采样一个点。这里的采样范围是根据场景大小设定的。然后找到树中距离随机点最近的节点,从这个最近节点沿着随机点方向延伸一个步长得到新节点。接着检查新节点是否与障碍物碰撞,如果不碰撞就将新节点加入树中。如果新节点接近目标点,就通过回溯找到完整路径。
- 子函数部分 :
findnearestnode函数计算树中每个节点到随机点的距离,返回距离最近节点的索引。extend函数根据最近节点和随机点确定方向,然后沿着该方向延伸一个步长得到新节点。check*collision**函数检查新节点是否与障碍物发生碰撞,通过计算新节点与每个障碍物中心的距离并与障碍物半径比较来判断。trace*path函数从目标节点回溯到起始节点,构建出完整的路径。
Reeds 曲线实现泊车入库
Reeds 曲线是一种常用于车辆路径规划的曲线,它能够使车辆在满足一定曲率约束下平滑地行驶。在自动泊车场景中,车辆需要以平滑的方式进入停车位,Reeds 曲线就派上用场了。
在 MATLAB 里利用 Reeds 曲线完成泊车入库,简单示例代码如下:
matlab
% 假设 RRT 算法找到的路径终点为 end_point
end_point = path(end, :);
% 这里假设车辆初始朝向为 0
theta_start = 0;
% 停车位的目标朝向假设为 pi/2
theta_goal = pi/2;
% 计算 Reeds 曲线参数
[~, ~, s] = reeds_shepp(end_point(1), end_point(2), theta_start, goal(1), goal(2), theta_goal);
% 绘制 Reeds 曲线
figure;
hold on;
plot(path(:, 1), path(:, 2), 'b'); % 绘制 RRT 找到的路径
plot(s(:, 1), s(:, 2), 'r'); % 绘制 Reeds 曲线
scatter(start(1), start(2), 'go'); % 起始点
scatter(goal(1), goal(2), 'ro'); % 目标点
for i = 1:size(obstacles, 1)
rectangle('Position', [obstacles(i, 1) - obstacles(i, 3), obstacles(i, 2) - obstacles(i, 3), 2 * obstacles(i, 3), 2 * obstacles(i, 3)], 'Curvature', [1, 1], 'FaceColor', 'k');
end
xlabel('X');
ylabel('Y');
title('RRT Path with Reeds - Shepp Curve for Parking');
hold off;代码分析
- 参数定义:根据 RRT 算法找到的路径终点,以及假设的车辆初始朝向和停车位目标朝向,为计算 Reeds 曲线做准备。
- 曲线计算 :调用
reeds_shepp函数(这里假设已经有这个函数实现)计算出 Reeds 曲线的参数。 - 绘制部分:将 RRT 找到的路径、Reeds 曲线、起始点、目标点以及障碍物都绘制出来,方便直观查看路径规划效果。
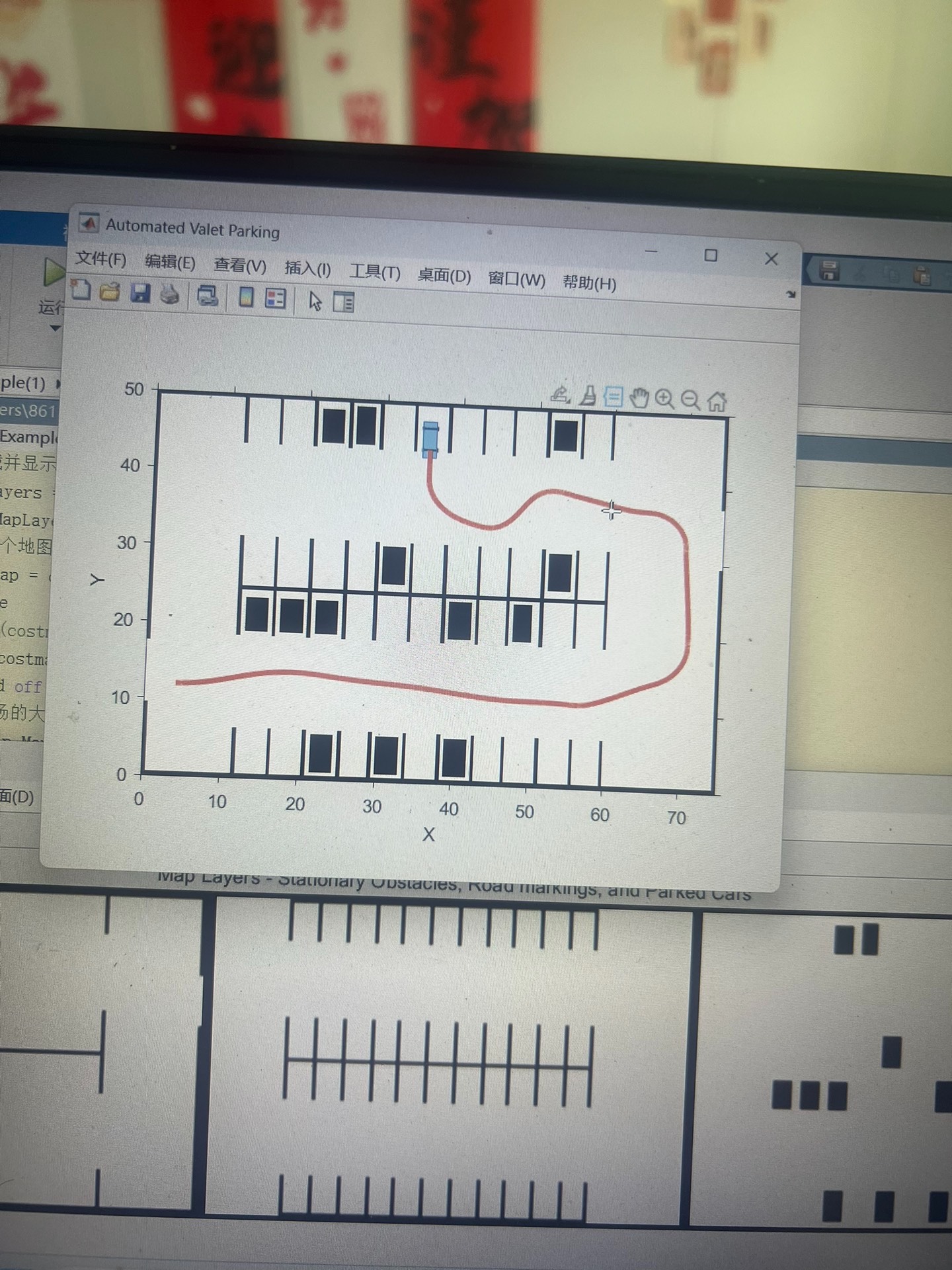
调用 maplayer 处理场景
在实际应用中,maplayer 可以用于处理更复杂的场景地图。例如加载地图文件、设置地图边界、标注特殊区域等。
假设我们有一个地图文件 map.png,利用 maplayer 加载并处理地图的代码如下:
matlab
% 加载地图
map = imread('map.png');
map = rgb2gray(map);
map = imcomplement(map);
% 创建地图对象
map_obj = Map(map, [0, size(map, 2), 0, size(map, 1)]);
% 设置地图显示参数
set(map_obj, 'ShowGrid', 'off');
set(map_obj, 'GridColor', 'none');代码分析
- 地图加载:首先读取地图图像文件,将其转换为灰度图并取反,这样白色区域表示可通行区域,黑色表示障碍物区域。
- 对象创建 :使用处理后的地图数据创建一个地图对象
map_obj,并设置地图的坐标范围。 - 显示设置:关闭地图的网格显示并设置网格颜色为无,使地图显示更加简洁。
通过以上基于 MATLAB 的 RRT 算法路径搜索、Reeds 曲线泊车入库以及 maplayer 场景处理,我们就能构建一个较为完整的自动泊车最优路径规划系统啦。希望这篇博文能给对自动驾驶路径规划感兴趣的小伙伴一些启发。