DP节能动态规划+电机模型Carsim联合仿真验证 软件使用:Matlab/Simulink2021a+Carsim2019(必须一样的版本+远程调试需格外200) 适用场景:采用模块化建模方法,搭建联合仿真模型,其中包含单独的基于DP动态规划节能速度规划算法(注意是单独,即离线运算),将计算出的s-vx节能速度信息导入到Carsim联合仿真平台当中进行仿真验证。 包含模块:单独的基于DP动态规划节能速度规划算法(DP动态规划算法核心、能耗计算模块、坡度计算模块、综合代价计算模块)、Carsim联合仿真验证平台(电动汽车执行器、PID速度跟踪器、节能速度、轮毂电机模块导入模块) 包含:Matlab/Simulink源码文件,详细建模说明文档,对应参考资料及相关文献, 其他: 本人店铺内其他优惠的无人驾驶、车辆规划控制、队列控制等方向的现有模型。
最近在研究车辆节能相关课题时,接触到了DP节能动态规划与电机模型Carsim联合仿真验证,感觉收获颇丰,今天就来和大家分享一下这个有趣的过程。
一、软件版本与"小陷阱"
本次联合仿真使用的软件版本是Matlab/Simulink2021a + Carsim2019。一定要注意版本的匹配,不然很可能在联合仿真过程中遇到各种莫名其妙的问题。而且,如果需要远程调试,据说还得额外花200,看来这远程调试也是有"身价"的呢。
二、适用场景与整体思路
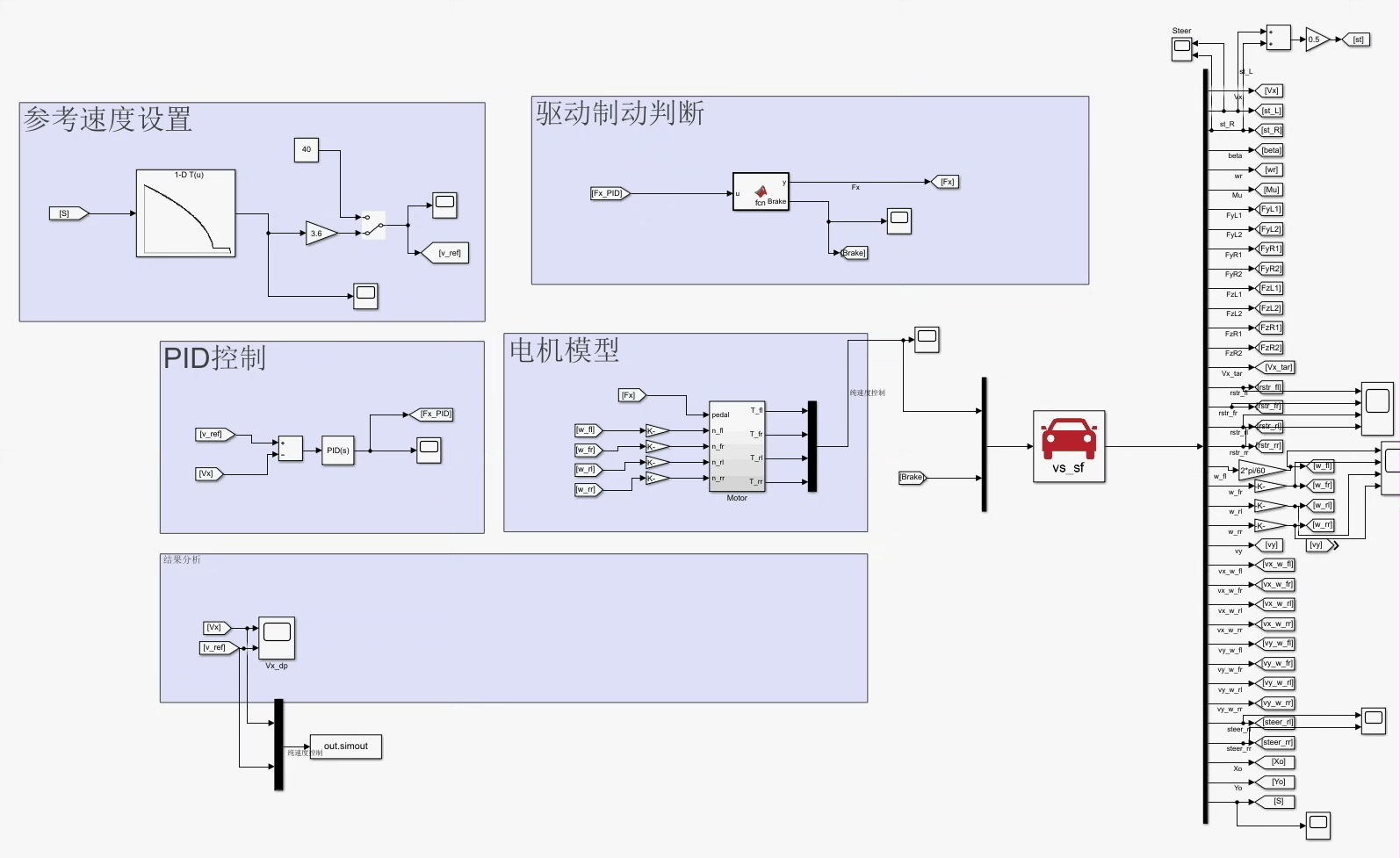
这里采用的是模块化建模方法来搭建联合仿真模型。整个流程中,基于DP动态规划的节能速度规划算法是单独运行的,也就是离线运算。它会计算出s - vx节能速度信息,然后把这个关键信息导入到Carsim联合仿真平台里进行仿真验证。这就好比先让一个"小助手"算出一些关键数据,再把这些数据交给"大舞台"去进行实际模拟,看看效果如何。
三、核心模块剖析
(一)DP动态规划节能速度规划算法
- DP动态规划算法核心
这部分是整个算法的"大脑"。它通过对各种条件和目标的分析,规划出节能的速度路径。简单来说,它要在众多可能的速度选择中,找到那个能让能耗最低的方案。这里用一段简化的Matlab伪代码来示意一下大致思路(实际代码会复杂很多):
matlab
% 假设我们有一个离散的速度选择集合 v_sets
v_sets = [10:5:50];
% 假设路程离散点 s_points
s_points = [0:10:100];
cost_matrix = zeros(length(s_points), length(v_sets));
for i = 2:length(s_points)
for j = 1:length(v_sets)
% 这里计算从上个点到当前点,以速度v_sets(j)行驶的代价
cost_matrix(i, j) = calculate_cost(s_points(i - 1), s_points(i), v_sets(j));
end
end
% 寻找最优速度路径
[~, optimal_index] = min(cost_matrix, [], 2);
optimal_speed_path = v_sets(optimal_index);在这段代码里,首先定义了速度选择集合和路程离散点,然后通过嵌套循环,对每个路程点和速度组合计算代价,最后找出每个路程点对应的最优速度,从而得到最优速度路径。
- 能耗计算模块
能耗计算模块会根据车辆的行驶速度、坡度等因素来计算能耗。下面是一个简单的能耗计算函数示例(同样是简化版):
matlab
function energy_consumption = calculate_energy(speed, slope)
% 假设车辆的一些固定参数
mass = 1500;
drag_coefficient = 0.3;
frontal_area = 2;
air_density = 1.225;
% 根据物理公式计算能耗,这里简化为与速度和坡度相关的式子
energy_consumption = (0.5 * air_density * drag_coefficient * frontal_area * speed^2 + mass * 9.81 * sin(slope)) * speed;
end这个函数根据输入的速度和坡度,结合车辆的一些物理参数,利用简单的物理公式估算能耗。在实际应用中,会有更精确和复杂的模型。
- 坡度计算模块
坡度计算模块要根据地形信息来获取坡度。假设我们有一个地形数据文件 terrain_data.txt,里面记录了每个路程点的海拔高度,下面这段代码展示如何根据海拔高度计算坡度:
matlab
% 读取地形数据
terrain_data = readtable('terrain_data.txt');
altitude = table2array(terrain_data(:, 2));
distance = table2array(terrain_data(:, 1));
slope = zeros(length(altitude), 1);
for i = 2:length(altitude)
slope(i) = atan((altitude(i) - altitude(i - 1)) / (distance(i) - distance(i - 1)));
end这段代码先读取地形数据文件,然后通过相邻路程点的海拔高度差和距离差来计算坡度。
- 综合代价计算模块
这个模块把能耗、坡度等因素综合起来计算综合代价。它会调用前面的能耗计算模块和坡度相关信息来完成这个任务。
matlab
function total_cost = calculate_total_cost(speed, slope)
energy_cost = calculate_energy(speed, slope);
% 假设坡度代价是一个简单的与坡度绝对值相关的函数
slope_cost = 100 * abs(slope);
total_cost = energy_cost + slope_cost;
end这里把能耗代价和坡度代价相加得到综合代价,当然实际应用中代价的计算可能会更复杂,需要考虑更多因素。
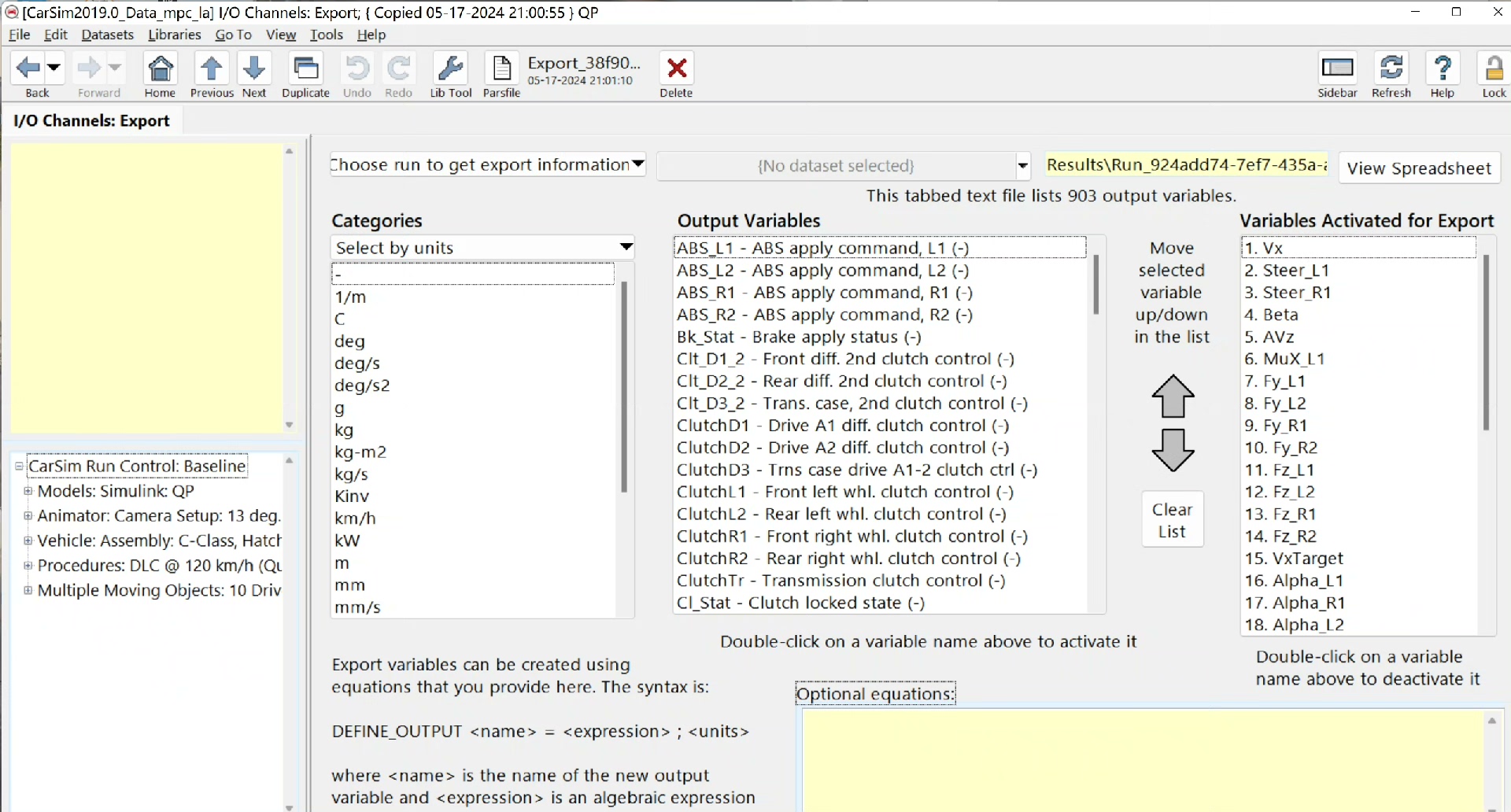
(二)Carsim联合仿真验证平台
- 电动汽车执行器
电动汽车执行器负责接收速度等控制信号,然后驱动车辆运动。在Carsim里,它会根据导入的节能速度信息,控制车辆的实际行驶。
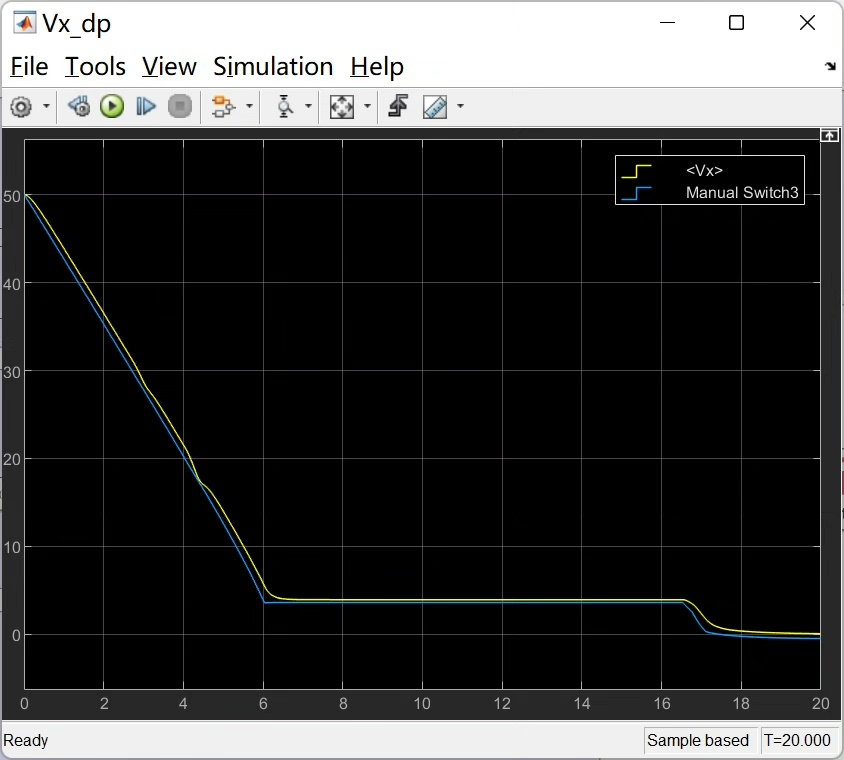
- PID速度跟踪器
PID速度跟踪器的作用是让车辆尽可能准确地跟踪DP算法计算出的节能速度。下面是一个简单的Matlab实现PID控制的代码示例:
matlab
% 初始化PID参数
Kp = 0.5;
Ki = 0.1;
Kd = 0.05;
integral = 0;
previous_error = 0;
% 假设当前速度 current_speed 和目标速度 target_speed
current_speed = 30;
target_speed = 40;
for k = 1:100
error = target_speed - current_speed;
integral = integral + error;
derivative = error - previous_error;
control_signal = Kp * error + Ki * integral + Kd * derivative;
% 根据控制信号调整车辆速度,这里简单示意
current_speed = current_speed + control_signal;
previous_error = error;
end这段代码根据当前速度和目标速度的误差,通过PID算法计算出控制信号,以调整车辆速度,使其向目标速度靠近。
- 节能速度与轮毂电机模块导入模块
这个模块负责将DP算法计算出的节能速度信息导入到Carsim平台,并与轮毂电机模块进行交互。确保车辆按照节能速度运行,同时轮毂电机模块根据速度等需求提供相应的动力。
四、"宝藏"资料
本次联合仿真还包含Matlab/Simulink源码文件,详细建模说明文档,以及对应参考资料及相关文献。这些资料对于深入理解和进一步优化联合仿真模型非常有帮助。如果你对无人驾驶、车辆规划控制、队列控制等方向感兴趣,本人店铺内还有其他优惠的现有模型,说不定能给你带来更多灵感哦。
希望通过这次分享,大家对DP节能动态规划与电机模型Carsim联合仿真验证有了更清晰的认识,一起在车辆节能研究的道路上"乘风破浪"吧!