基于MATLAB/SIMULINK的异步电动机矢量控制系统 仿真目的:矢量控制的基本思想是把异步电动机经过坐标变换等效成直流电动机,然后仿照直流电动机的控制方法进行控制器设计,再经过相应的反变换,就可以控制交流异步电动机。 仿真结果:异步电动机矢量控制的特点、分析过程等文件资料
在电机控制领域,矢量控制技术可谓是一颗璀璨的明珠。今天咱们就唠唠基于MATLAB/SIMULINK的异步电动机矢量控制系统。
一、矢量控制基本思想
矢量控制的基本思想超有意思,简单来说,就是把异步电动机通过坐标变换等效成直流电动机。这就好比给交流异步电动机施了个"魔法",让它摇身一变,拥有直流电动机的特性。为啥要这么干呢?因为直流电动机的控制方法相对成熟简单呀,我们可以仿照直流电动机的控制方法进行控制器设计,设计好后再经过相应的反变换,就能轻松控制交流异步电动机啦。
就像在MATLAB里,我们可以通过一些函数来实现坐标变换。比如常用的Clark变换和Park变换。以Clark变换为例,代码如下:
matlab
function [alpha, beta] = clark_transform(a, b, c)
% Clark变换将三相静止坐标系变换到两相静止坐标系
alpha = a;
beta = (sqrt(3)/3) * (b - c);
end在这段代码里,a, b, c 是三相静止坐标系下的电流或电压信号。通过这个函数,我们把三相信号转换到了两相静止坐标系下的 alpha 和 beta 信号,为后续进一步变换到同步旋转坐标系做准备。
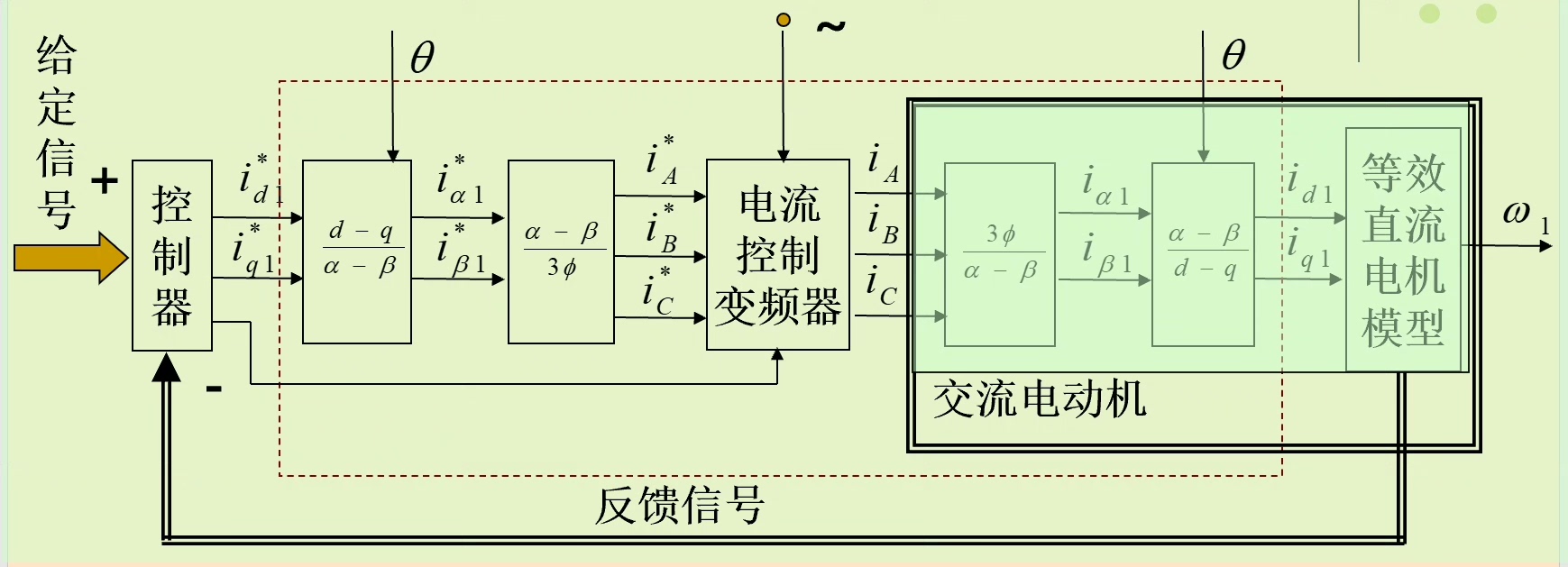
Park变换也是类似的道理,它把两相静止坐标系下的信号转换到同步旋转坐标系,这样就可以像控制直流电机一样分别控制励磁电流和转矩电流啦。
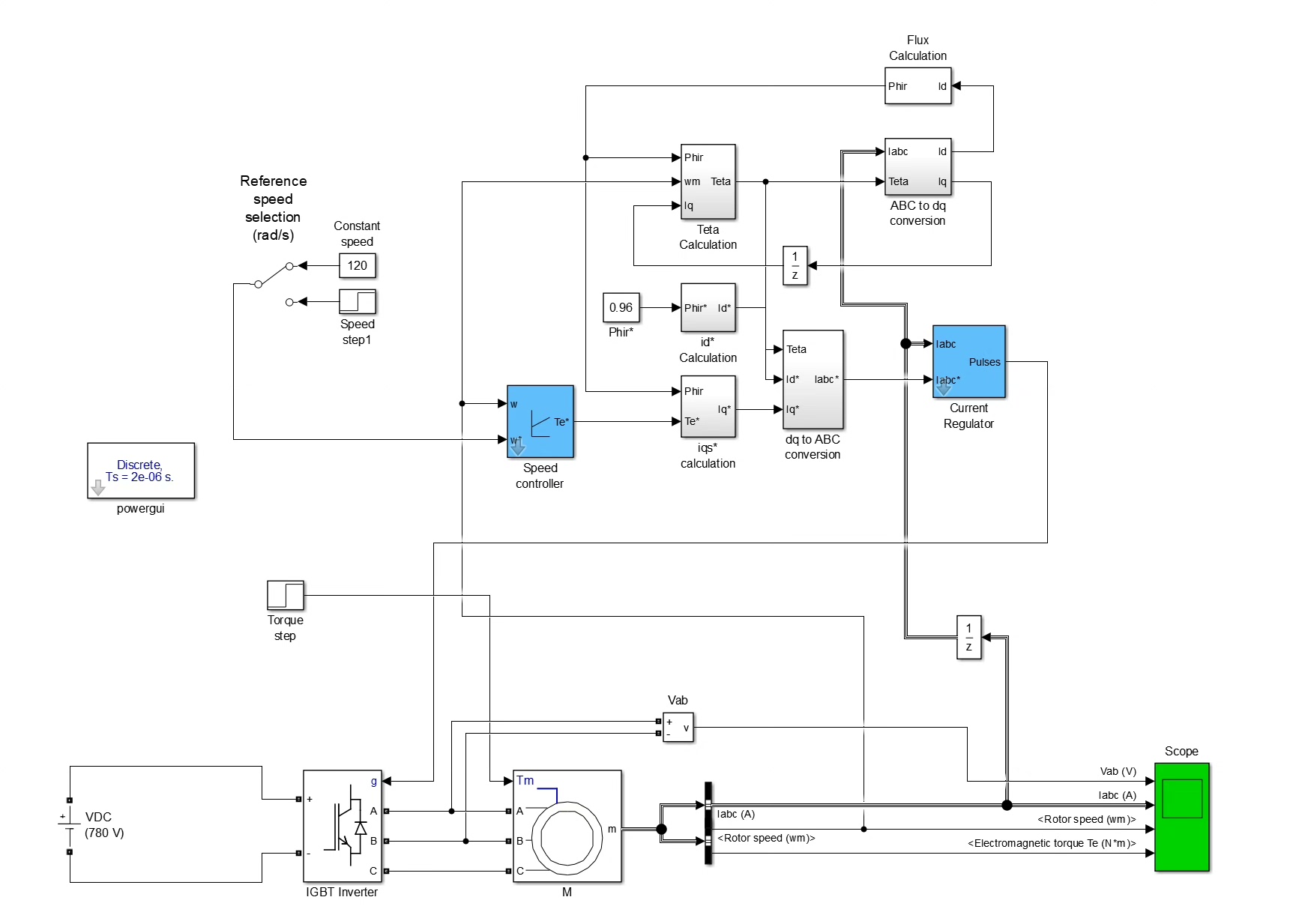
二、MATLAB/SIMULINK仿真搭建
在SIMULINK里搭建异步电动机矢量控制系统仿真模型是个有趣的过程。我们得先把各个模块搭建好,像电机模块、坐标变换模块、控制器模块等等。
电机模块我们可以调用SIMULINK自带的异步电机模型,它已经内置好了电机的各种参数和运行方程。坐标变换模块就是刚刚咱们说的Clark变换和Park变换等实现的地方。
控制器模块则是关键中的关键,这里我们仿照直流电机控制方法设计控制器。比如常用的PI控制器,代码实现起来也不难:
matlab
classdef PIController
properties
kp % 比例系数
ki % 积分系数
integral % 积分项
end
methods
function obj = PIController(kp, ki)
obj.kp = kp;
obj.ki = ki;
obj.integral = 0;
end
function output = update(obj, error, dt)
obj.integral = obj.integral + error * dt;
output = obj.kp * error + obj.ki * obj.integral;
end
end
end这里定义了一个 PIController 类,初始化时设置比例系数 kp 和积分系数 ki。update 方法根据误差 error 和时间步长 dt 来更新输出,实现了PI控制的功能。在SIMULINK里,我们可以把这个函数封装成一个子系统模块,方便在整体模型里调用。
三、仿真结果及分析
经过一番折腾,仿真跑起来啦,我们得到了异步电动机矢量控制的一系列结果。从结果中能看到异步电动机矢量控制的特点。比如说,它能实现对异步电动机的高性能控制,就像直流电机一样,能够快速准确地响应控制指令,实现转速和转矩的精准控制。
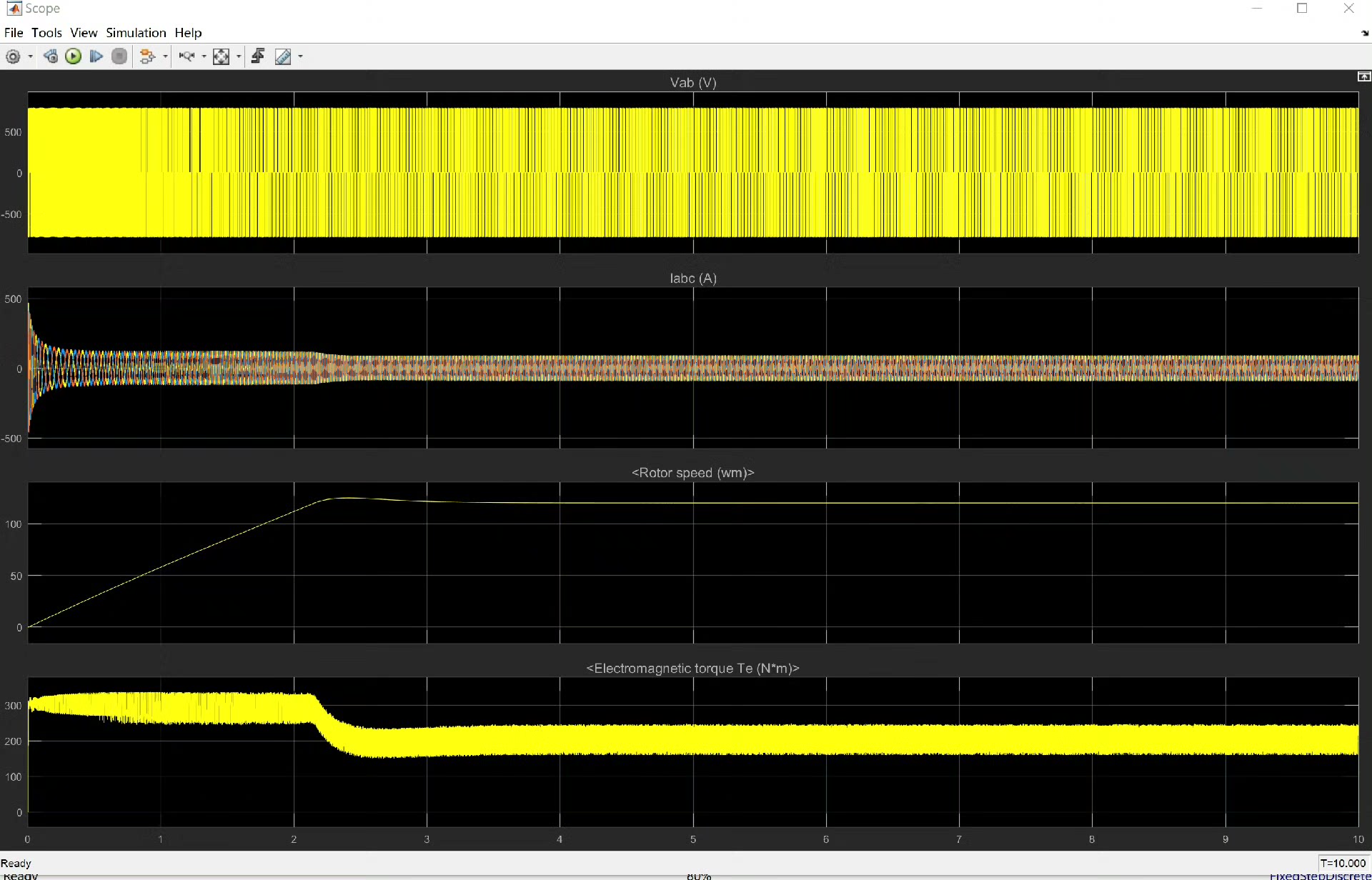
分析过程中,我们可以观察各个变量的波形。比如转速波形,在给定转速阶跃变化时,矢量控制下的电机转速能够迅速跟踪给定值,超调量也能控制在较小范围内。这得益于坐标变换和合理设计的控制器,把交流电机模拟成直流电机来控制,让电机的动态性能大大提升。
再看转矩波形,同样能快速响应指令变化,而且波动相对较小,保证了电机运行的平稳性。这些特点在实际应用中意义非凡,像在工业生产中的电机驱动系统,就需要这种高精度、快速响应的控制,矢量控制技术无疑是不二之选。
总的来说,基于MATLAB/SIMULINK的异步电动机矢量控制系统仿真,不仅让我们深入理解了矢量控制的原理,还通过实际动手搭建模型和分析结果,掌握了如何将理论应用到实际控制中,为电机控制领域的进一步探索打下了坚实基础。