横列式双旋翼两轴飞行器倾转旋翼simulink simscape仿真MATLAB 内环 外环pid控制
最近在实验室折腾横列式双旋翼飞行器仿真,这玩意儿跟传统四旋翼完全不是一个路数。两个螺旋桨横向排列不说,还得实现旋翼倾转控制,调试的时候差点没把键盘砸了。今儿就手把手教你怎么在Simulink里搭模型,顺带聊聊双环PID怎么玩出花。
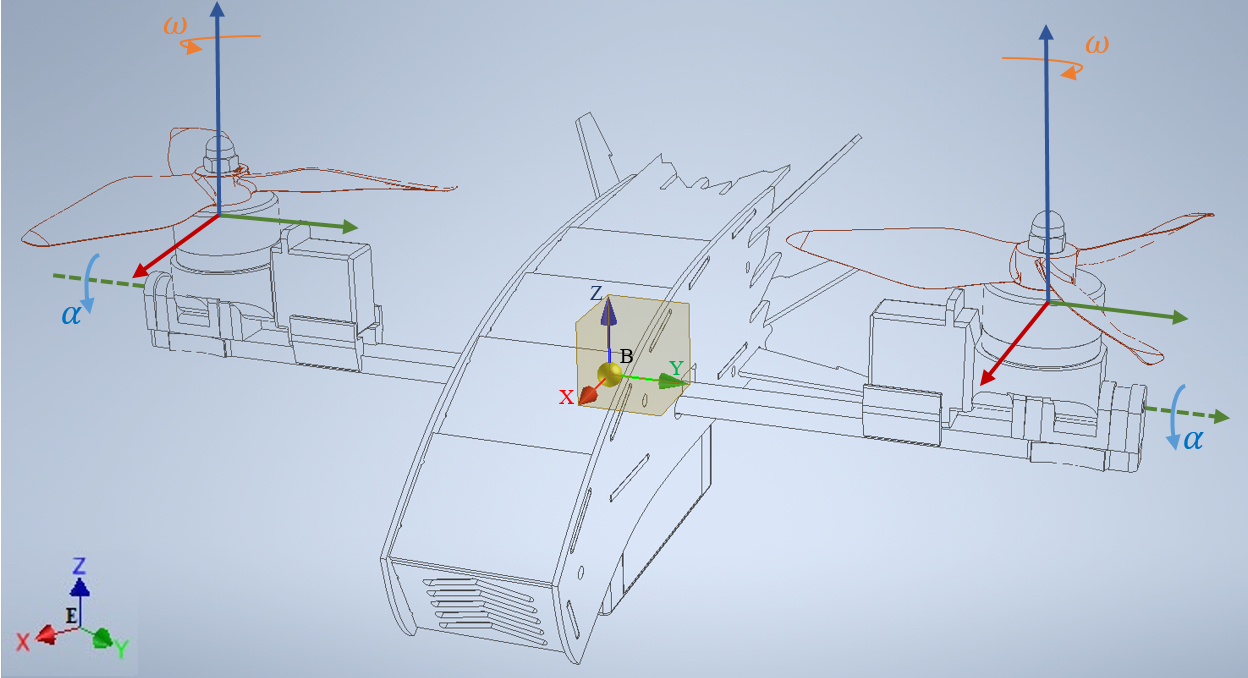
先上硬菜------模型搭建。在Simscape Multibody里搞机械结构时,千万别傻乎乎用默认的旋转关节。咱得给每个旋翼加个倾斜自由度,具体操作看这段配置:
matlab
smexportrigidbody('rotor_assembly',...
'JointType','revolute',...
'Axis',[0 1 0],... % Y轴旋转实现倾转
'Parent','base_link');这个Y轴旋转关节就是让旋翼能前后摆动的关键,注意坐标系对齐别搞反了。动力学方程建议直接用Simscape自带的模块,比手推方程靠谱多了,毕竟这货要考虑陀螺力矩耦合效应。
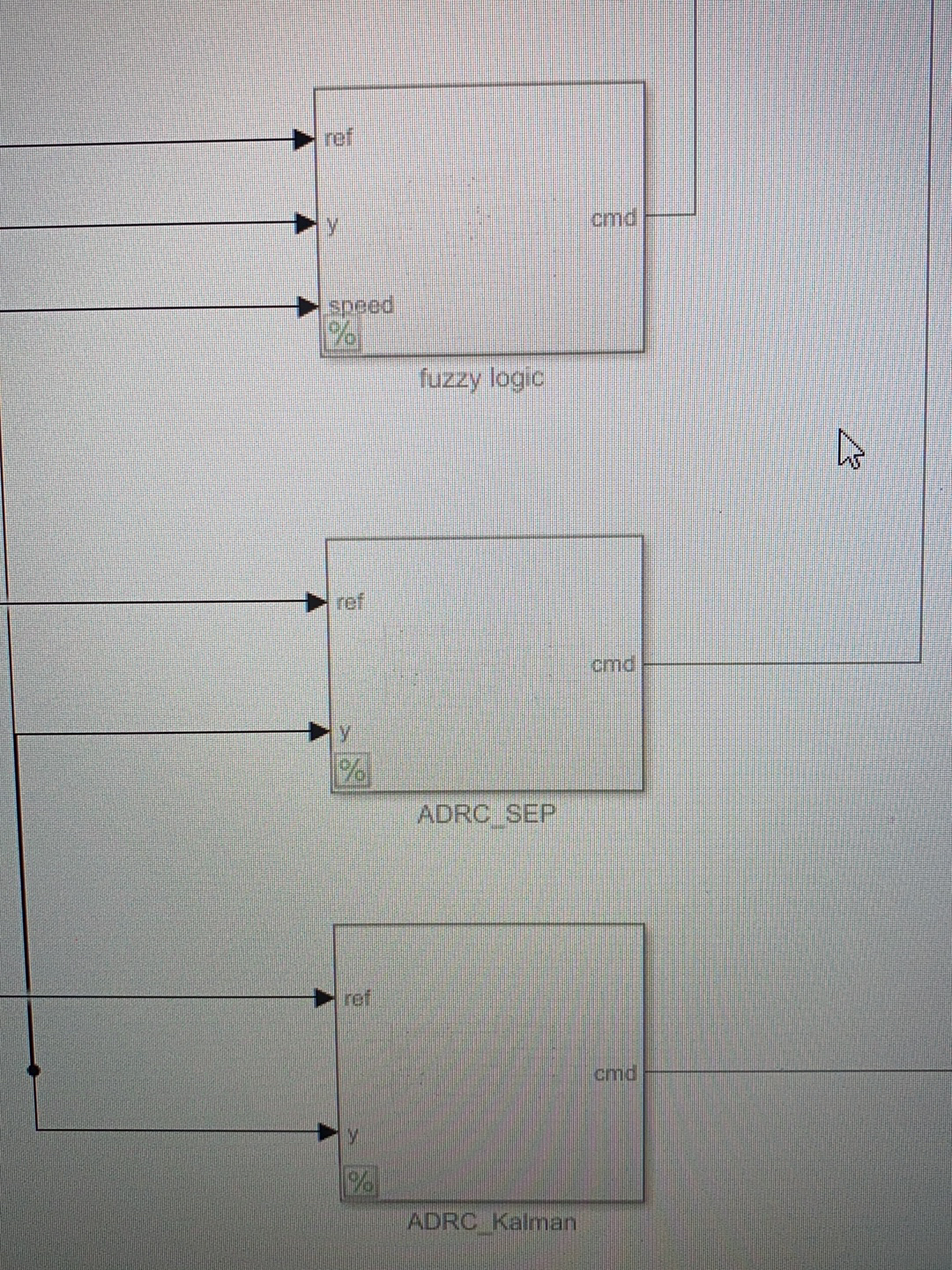
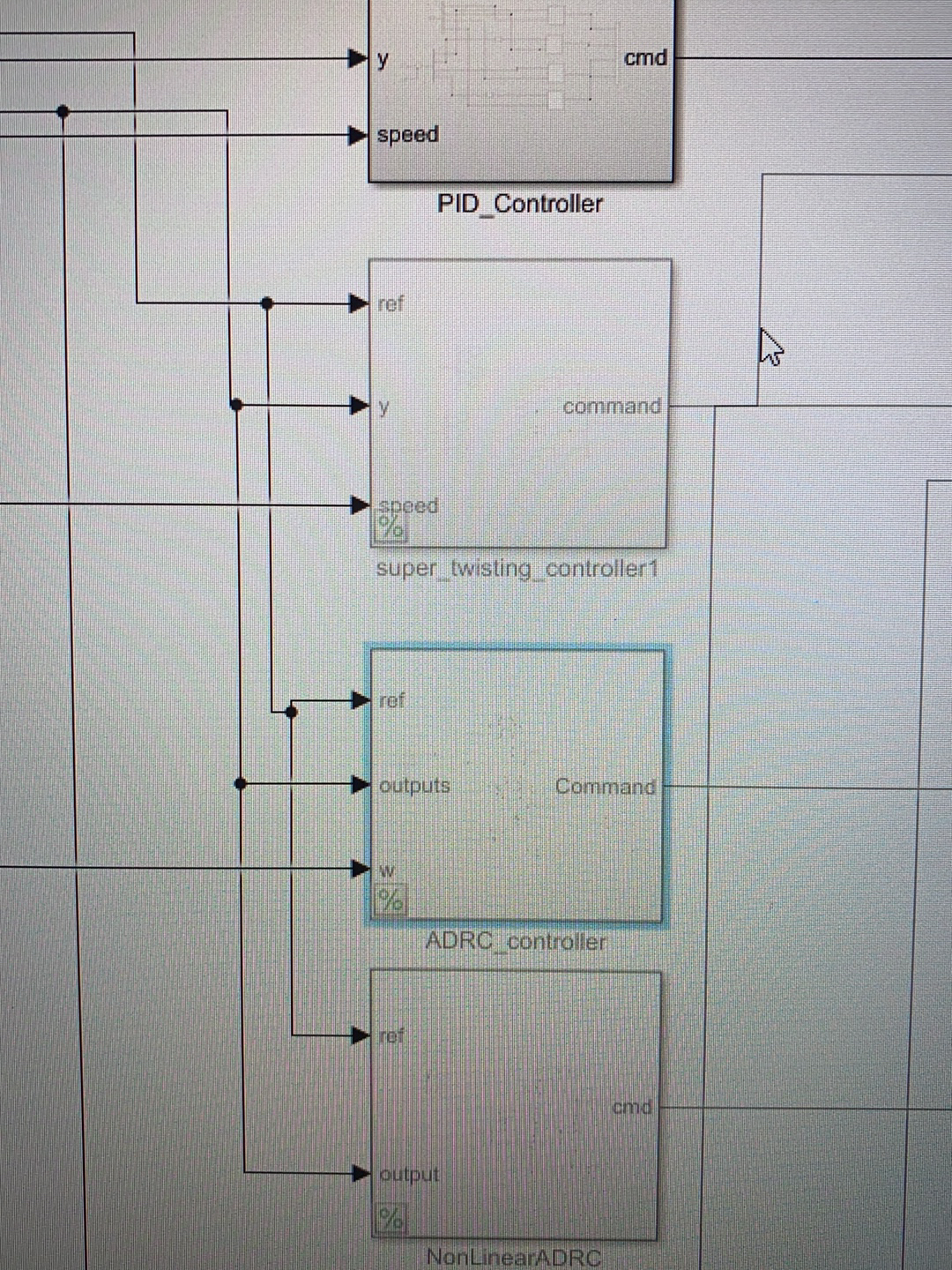
内环控制才是重头戏。咱在Simulink里直接拖PID模块不香吗?但双旋翼的横滚-偏航耦合得特殊处理。看这个暴力调参法:
matlab
inner_pid = pid(8.2, 0.05, 0.8, 0.01); % 内环角度控制
set_param('model/Inner_PID','P','8.2','I','0.05','D','0.8');参数不是乱填的,8.2的P值能快速响应姿态变化,0.8的D值专治电机延迟带来的震荡。注意这里采样时间设了0.01秒,比外环快5倍,毕竟姿态控制慢了直接炸机。
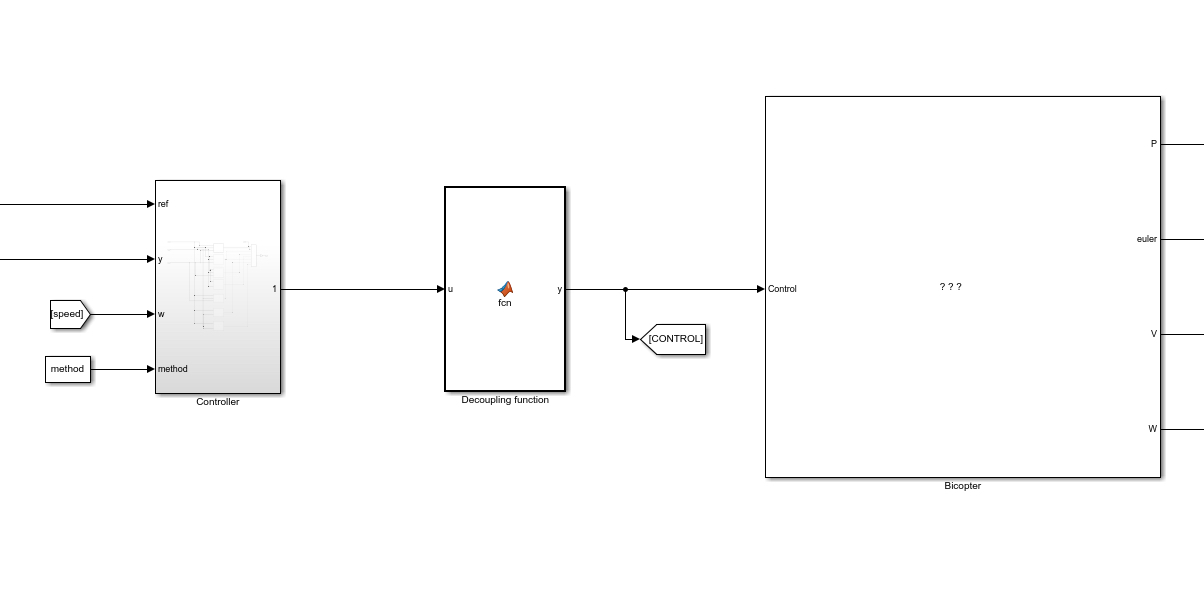
外环位置控制更刺激。这里有个骚操作------把倾转角度当控制量喂给内环。代码里这么实现:
matlab
function tilt_angle = outer_controller(pos_error)
persistent integral;
if isempty(integral)
integral = 0;
end
k_outer = [0.6, 0.02, 1.2];
integral = integral + pos_error * 0.02;
tilt_angle = k_outer*[pos_error; integral; derivative(pos_error)];
end这个自定义函数模块处理XY平面位置误差,积分项加了抗饱和处理。注意外环PID的I值只有0.02,大了容易引发旋翼过冲。
调参时切记先锁死外环,单独调内环。有个坑得提醒:Simscape的物理引擎步长要和控制器步长对齐,不然会出现迷之震荡。建议用变步长求解器,最大步长别超过0.05秒。
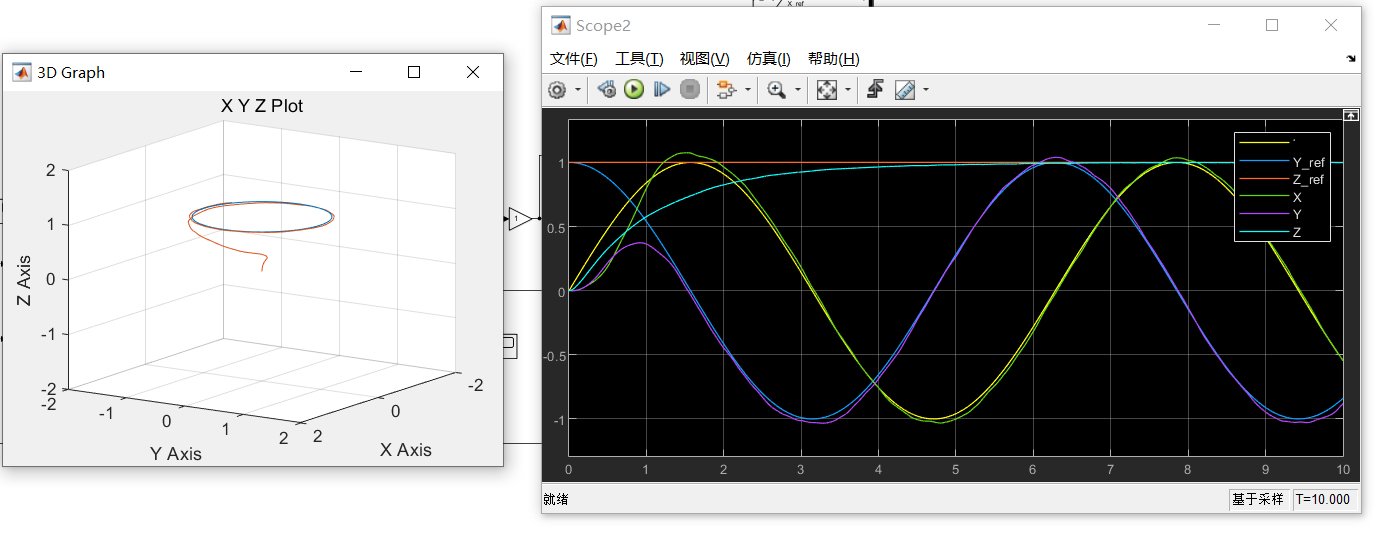
最后上点干货------仿真结果怎么看?在Animation窗口看旋翼摆动幅度是否平滑,Scope里重点关注横滚角速度曲线。正常应该像心跳图一样有规律波动,要是出现锯齿状,赶紧检查陀螺力矩补偿模块。
这破项目调了俩礼拜,最后发现是电机模型里的库伦摩擦参数没设对。建议各位在搭模型时,先把所有摩擦系数设为零,等控制律调通了再慢慢加非线性因素,保准能少掉几根头发。