使用MATLAB和Simulink的自动驾驶汽车建模acc cacc自适应巡航协同
在自动驾驶领域,自适应巡航控制(ACC)和协同自适应巡航控制(CACC)是非常关键的技术。MATLAB和Simulink为我们提供了强大的工具来对这两种控制策略进行建模和协同仿真。
1. 自适应巡航控制(ACC)基础
ACC旨在保持车辆与前方车辆的安全距离,同时按照设定速度行驶。在MATLAB中,我们可以通过简单的数学模型来初步描述ACC的控制逻辑。以下是一个简单的ACC速度控制的代码示例:
matlab
% 设定参数
v_desired = 30; % 期望速度,单位m/s
distance_threshold = 50; % 安全距离阈值,单位m
dt = 0.1; % 时间步长,单位s
time = 0:dt:100; % 仿真时间范围
% 初始化变量
v = zeros(size(time));
a = zeros(size(time));
distance = 100; % 初始跟车距离,单位m
for i = 2:length(time)
if distance < distance_threshold
a(i) = -0.5; % 减速
else
if v(i - 1) < v_desired
a(i) = 0.3; % 加速
else
a(i) = 0; % 保持速度
end
end
v(i) = v(i - 1) + a(i) * dt;
% 假设前方车辆匀速行驶,简单更新跟车距离
distance = distance - (v(i - 1) - 25) * dt;
end
figure;
subplot(2,1,1);
plot(time, v);
xlabel('时间 (s)');
ylabel('速度 (m/s)');
title('ACC速度变化');
subplot(2,1,2);
plot(time(2:end), a(2:end));
xlabel('时间 (s)');
ylabel('加速度 (m/s^2)');
title('ACC加速度变化');代码分析
- 参数设定 :首先设定了期望速度
vdesired*、安全距离阈值distance*threshold以及时间步长dt和仿真时间范围time。 - 初始化变量 :初始化速度
v、加速度a以及初始跟车距离distance。 - 控制逻辑循环:在循环中,根据当前跟车距离与安全距离阈值的比较来决定加速度。如果距离小于阈值则减速;否则,如果当前速度小于期望速度则加速,否则保持速度。每次循环根据上一时刻的速度和当前加速度更新速度。这里简单假设前方车辆以25m/s的速度匀速行驶来更新跟车距离。
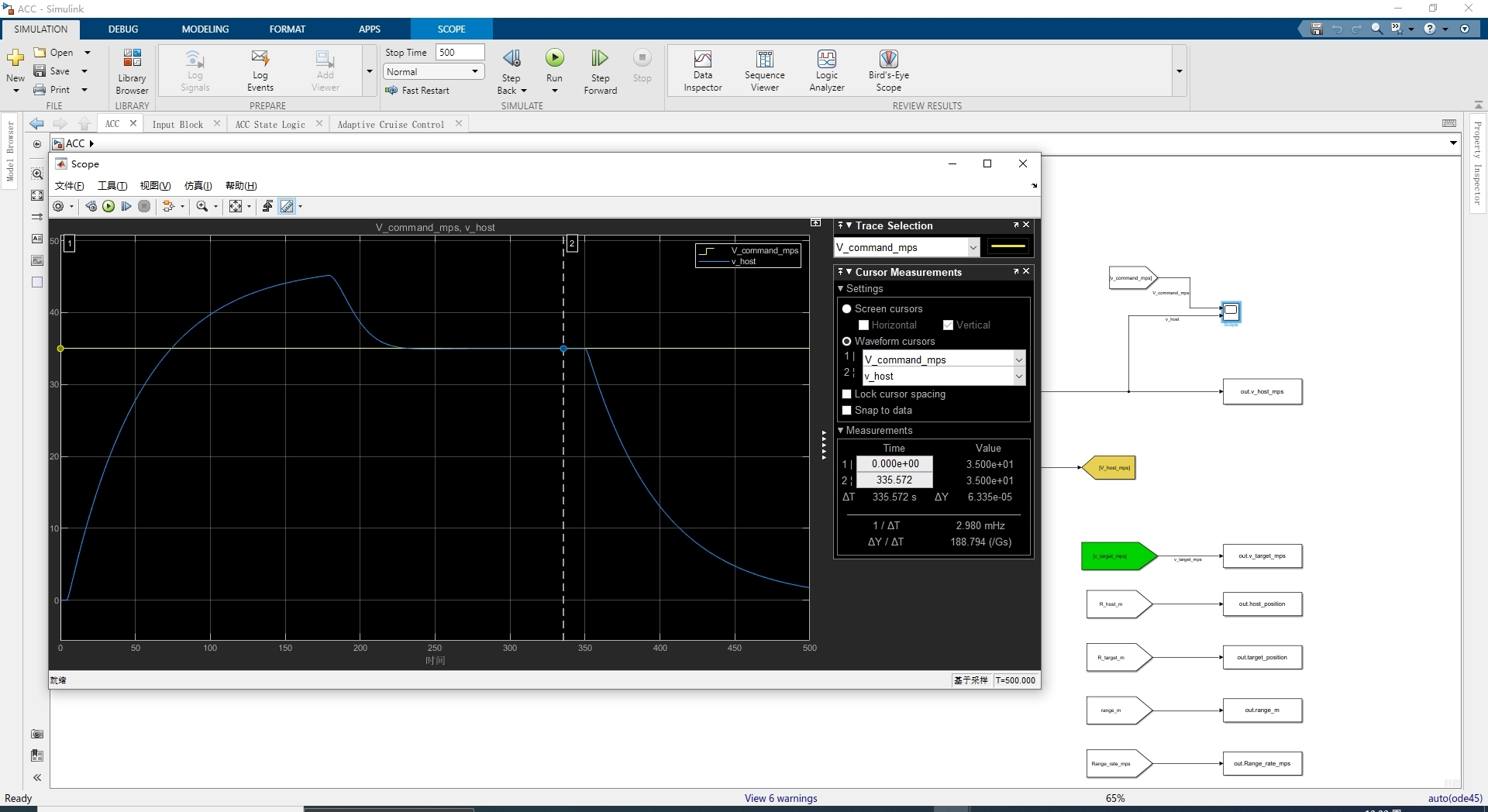
- 绘图 :最后使用
figure和subplot绘制速度和加速度随时间的变化曲线,方便直观观察ACC的控制效果。
2. 协同自适应巡航控制(CACC)进阶
CACC在ACC的基础上,通过车车通信获取前方车辆更多信息,如加速度等,从而实现更紧密、更高效的跟车。在Simulink中构建CACC模型更加直观。我们可以利用Simulink的模块库搭建系统。
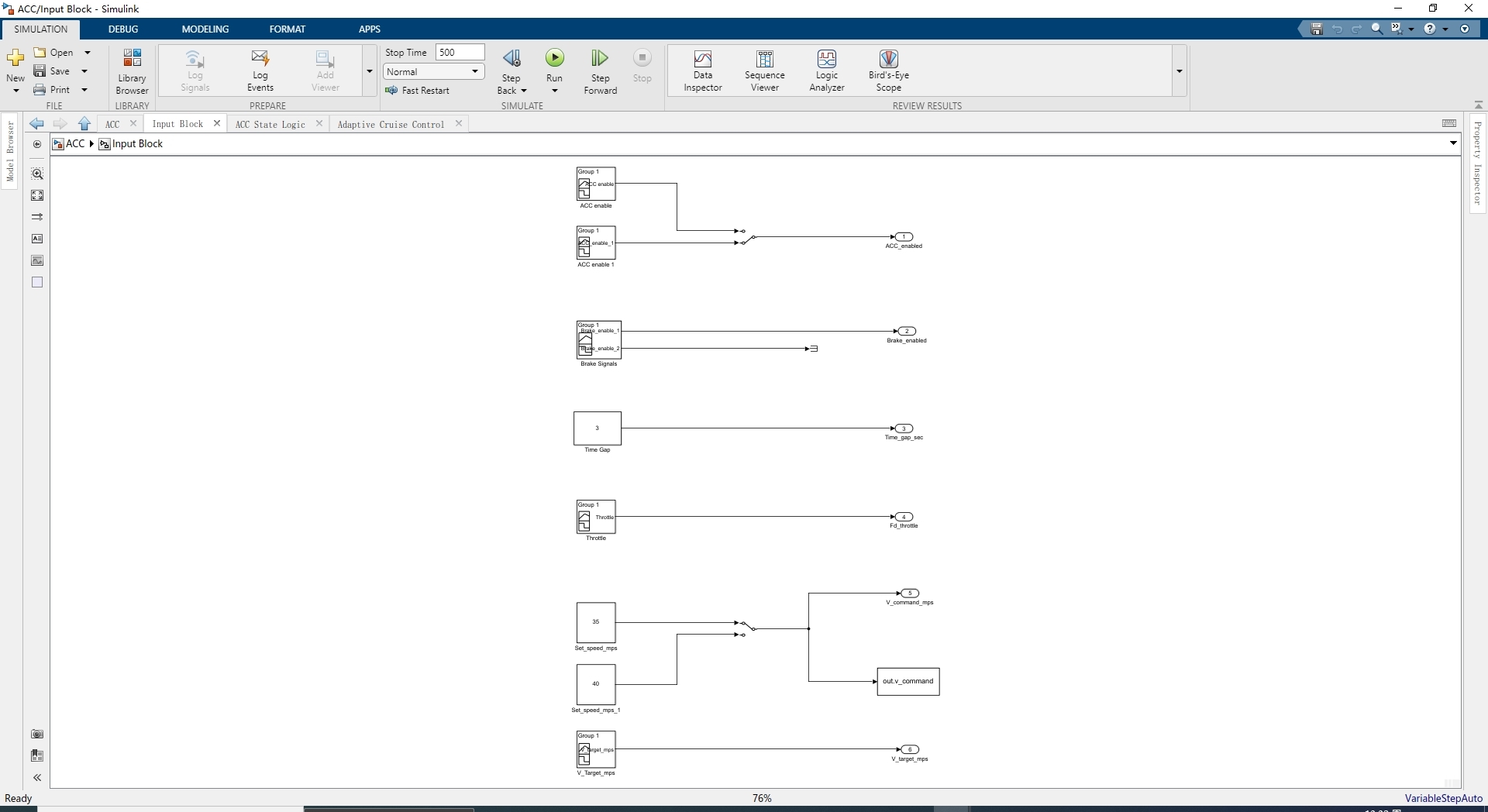
例如,我们可以创建一个简单的CACC模型,包含以下主要模块:
- 输入模块:用于设定期望速度、前方车辆速度和加速度等输入信号。
- 控制算法模块:这里实现CACC的控制算法,根据输入信息计算本车加速度。例如一种简单的CACC控制算法代码思路如下:
matlab
% 假设获取到前方车辆信息
v_lead = 30; % 前方车辆速度
a_lead = 0; % 前方车辆加速度
k_p = 0.5; % 比例系数
k_d = 0.2; % 微分系数
% 假设当前车辆与前方车辆的距离信息
distance_current = 40;
distance_desired = 30;
% CACC控制算法计算加速度
a_self = k_p * (distance_desired - distance_current) + k_d * (v_lead - v_self);代码分析
- 获取信息 :首先假设获取到前方车辆的速度
vlead**和加速度alead,以及设定了比例系数kp**和微分系数kd,同时也有当前车辆与前方车辆的距离信息。 - 控制算法 :通过比例 - 微分控制的思路,根据期望距离与当前距离的差值,以及前方车辆与本车速度差,计算出本车需要的加速度
a_self。这种算法能够更及时地响应前方车辆状态变化,实现更好的跟车效果。
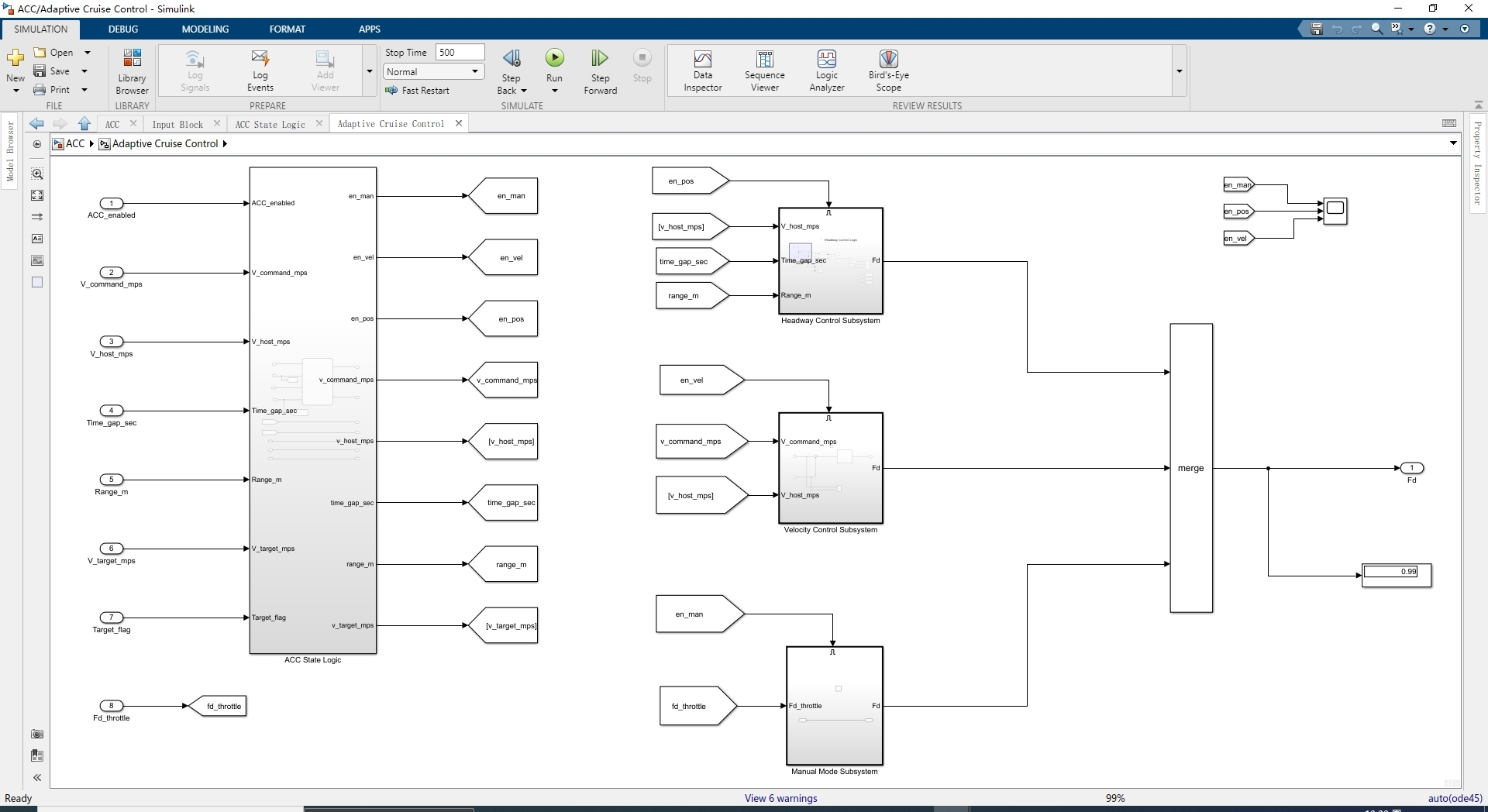
- 车辆动力学模块:模拟车辆实际的动力学响应,根据计算出的加速度更新车辆速度和位置。
- 输出模块:输出车辆的速度、加速度、位置等信息,方便观察和分析。
3. ACC与CACC的协同建模
在实际应用中,ACC和CACC可能需要协同工作。比如在通信信号不佳时,车辆从CACC模式切换到ACC模式。我们可以在Simulink中通过条件判断模块来实现这种切换逻辑。
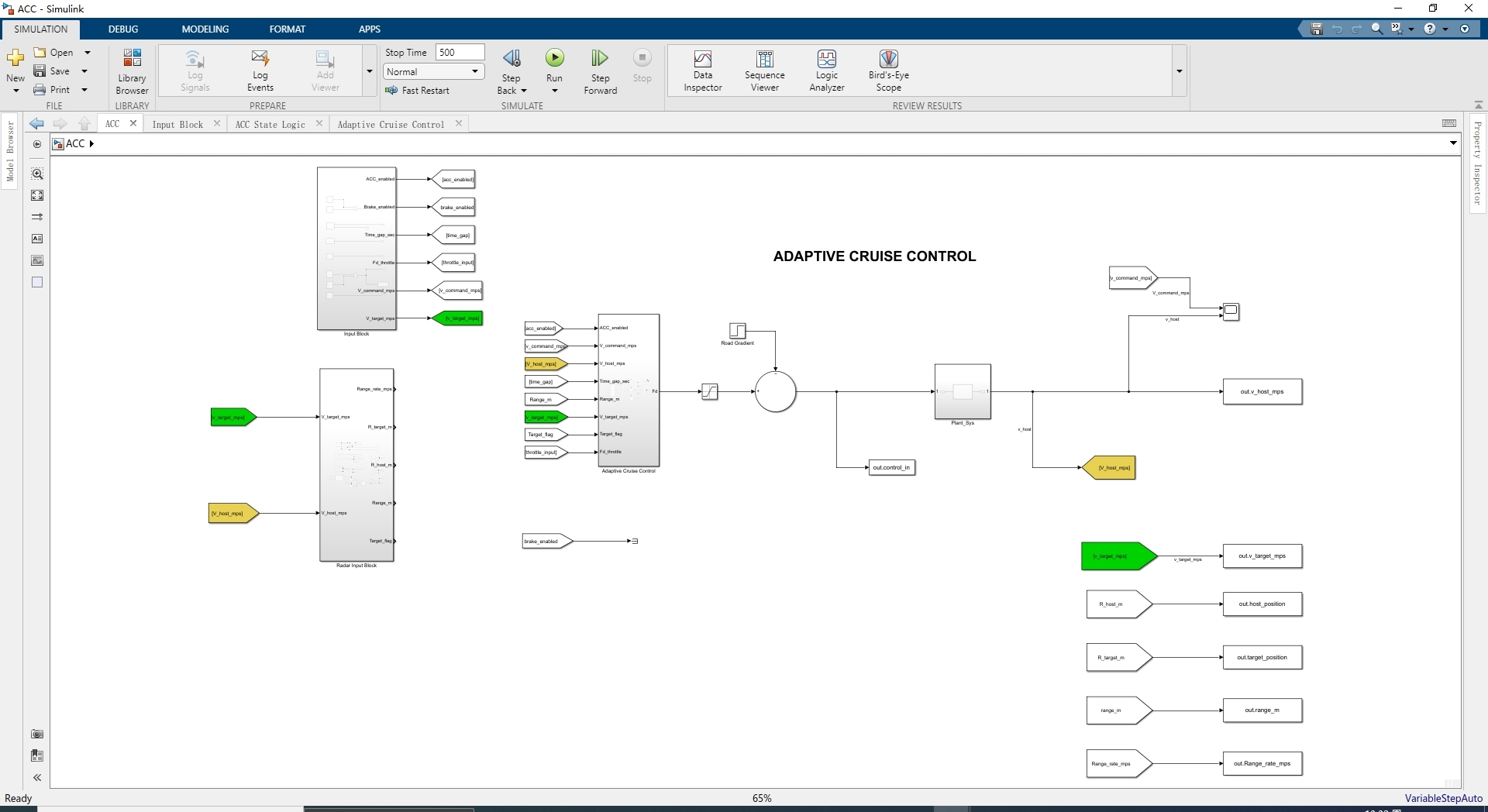
例如,我们可以设定一个信号质量监测模块,当信号质量低于某个阈值时,输出一个切换信号。然后利用这个切换信号来控制一个多路选择器(Mux),决定是将ACC还是CACC的控制信号输入到车辆动力学模块。
通过这种方式,我们能够结合ACC和CACC的优势,在不同环境下为自动驾驶汽车提供稳定可靠的巡航控制。利用MATLAB和Simulink的强大功能,我们不仅能够对单个控制策略进行详细建模和分析,还能实现复杂的协同控制,为自动驾驶技术的发展提供有力支持。
总之,MATLAB和Simulink为自动驾驶汽车的ACC和CACC建模协同提供了便捷且高效的平台,通过合理利用其工具和特性,我们可以更深入地研究和优化这些关键技术。