三类常见定义
OpenCV 中主要有三种常用外接矩形:
1. axis-aligned bounding box(AABB 轴对齐最小外接矩形)
使用 cv2.boundingRect(contour)
特点:
- 矩形边始终与 X、Y 轴平行
- 覆盖轮廓的最小面积矩形(在轴对齐限制下)
- 简单、速度快
- 不考虑旋转角度,因此对倾斜目标可能较大
数学原理:
对轮廓得到所有点的 xmin、xmax、ymin、ymax:
ini
w = xmax - xmin
h = ymax - ymin2. minimum area bounding rectangle(旋转最小外接矩形)
使用 cv2.minAreaRect(contour)
该矩形是面积最小的外接矩形,允许旋转。
特点:
- 能贴合物体方向
- 利用点集求凸包 + Rotating Calipers(旋转卡尺算法)
- 输出中心点、尺寸、旋转角度
矩形可更精确描述 非水平物体(如倾斜条码、车牌、笔、手机等)。
数学原理(简述):
- 对轮廓做凸包
- 对凸包依次旋转,使某条边与 x 轴平行
- 在每个旋转角度下计算外接矩形面积
- 取面积最小者
关键:这是一个 几何最优化问题,时间复杂度接近线性 O(n)。
3. 最小包围圆/椭圆
常见为:
cv2.minEnclosingCircle(contour)cv2.fitEllipse(contour)
虽然不是矩形,但常与外接矩形一起使用,用于形状更规则的物体。
适用场景:球体、圆盘、胶囊型物体。
适用场景比较
| 方法 | 精度 | 是否旋转 | 速度 | 适用场景 |
|---|---|---|---|---|
boundingRect |
中等 | 否 | 最快 | ROI 裁剪、初步定位、跟踪初始化 |
minAreaRect |
高 | 是 | 较快 | 倾斜目标,真实物体方向分析,条码/车牌检测 |
fitEllipse |
针对椭圆 | 是 | 较慢 | 圆形、椭圆形物体分析 |
示例
三种外接矩形
python
import cv2
import numpy as np
# 读取图像
img = cv2.imread("test.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值化
_, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 获取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for cnt in contours:
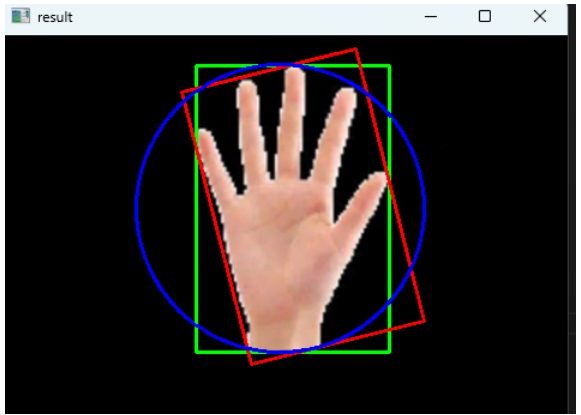
# ====== 1. 轴对齐外接矩形 ======
x, y, w, h = cv2.boundingRect(cnt)
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)
# ====== 2. 旋转最小外接矩形 ======
rect = cv2.minAreaRect(cnt) # 返回 (中心点, (宽度,高度), 旋转角度)
box = cv2.boxPoints(rect)
box = np.int0(box)
cv2.drawContours(img, [box], 0, (0, 0, 255), 2)
# ====== 3. 最小外接圆 ======
(cx, cy), radius = cv2.minEnclosingCircle(cnt)
cv2.circle(img, (int(cx), int(cy)), int(radius), (255, 0, 0), 2)
cv2.imshow("result", img)
cv2.waitKey(0)
cv2.destroyAllWindows()执行效果:
总结
boundingRect快速、简单,但不考虑旋转minAreaRect使用旋转卡尺得到真正意义上的最小外接矩形,是多数精确几何问题首选- 选择方法需根据对象形状和业务场景决定
- 旋转矩形角度处理要特别注意
- 通过透视变换可获得真实旋转区域的裁剪图像