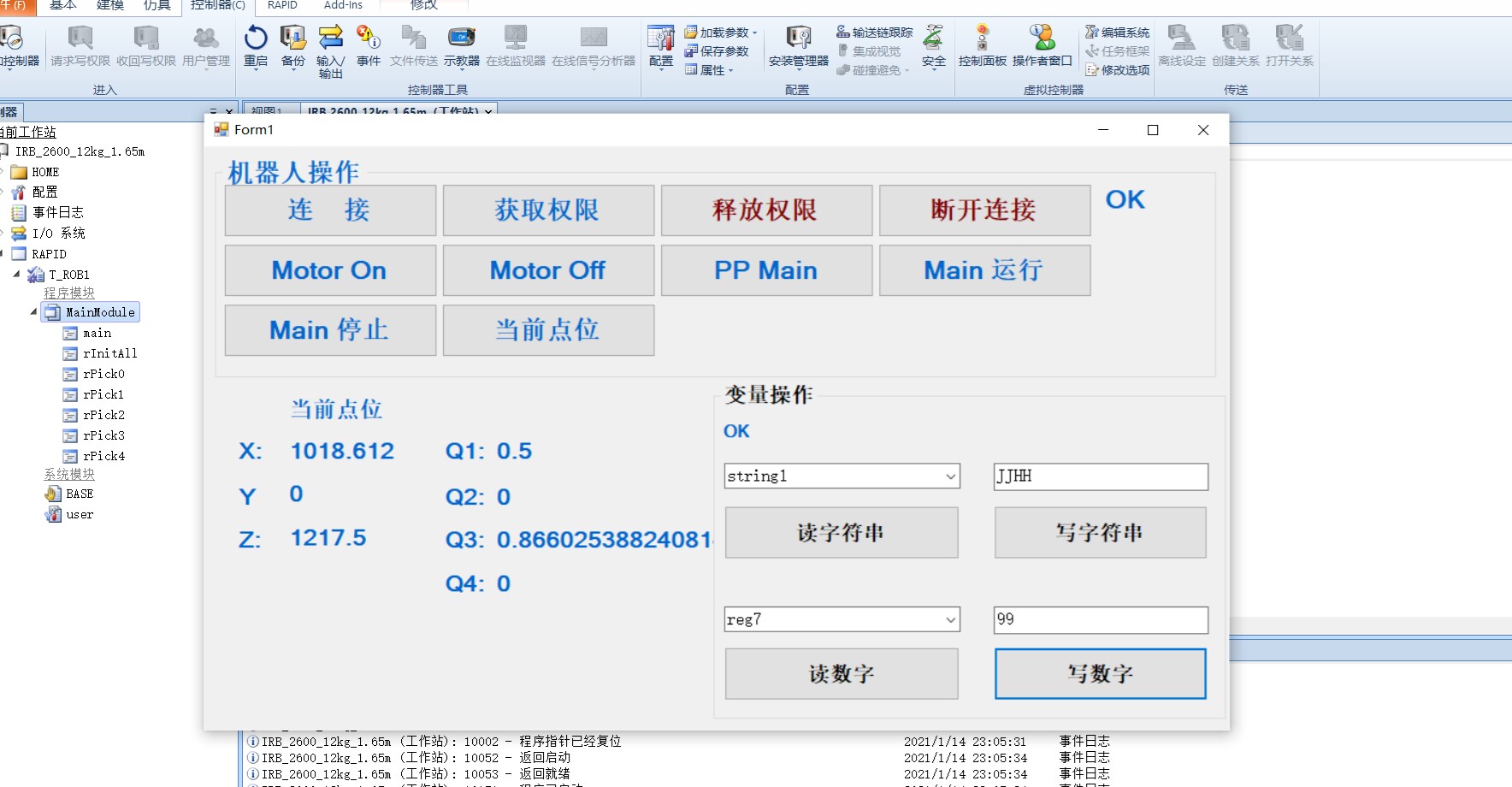
ABB机器人二次开发 C#读取和写入数据,可以获取点位信息及写入点位信息。 自己写的ABB机器人类,机器人常规操作功能都有,非常适合进行二次开发。
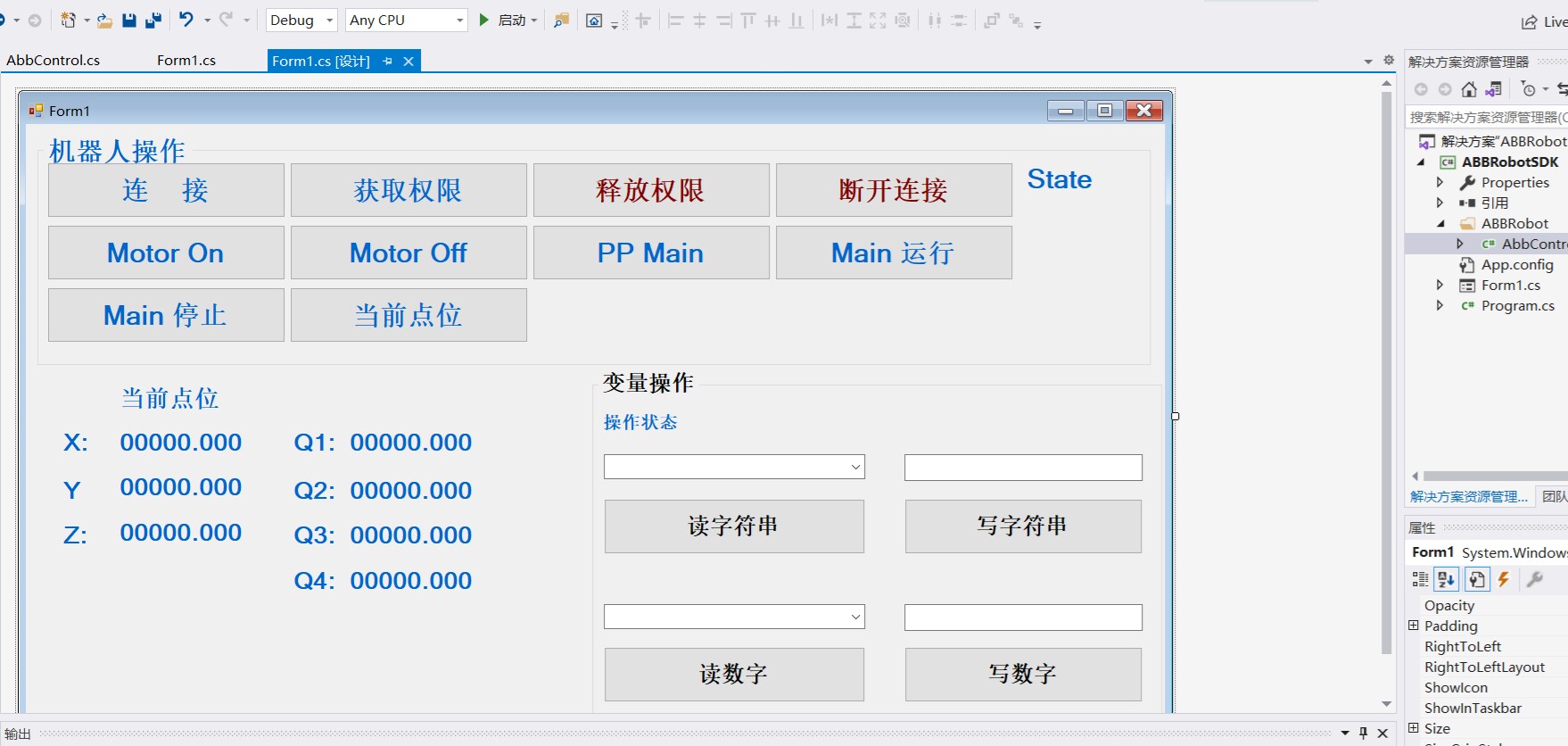
在自动化控制领域,ABB机器人以其高精度和稳定性被广泛应用。而二次开发能让ABB机器人更好地适配特定业务场景,今天咱们就来聊聊如何用C#实现对ABB机器人数据的读取和写入,特别是点位信息的获取与写入。
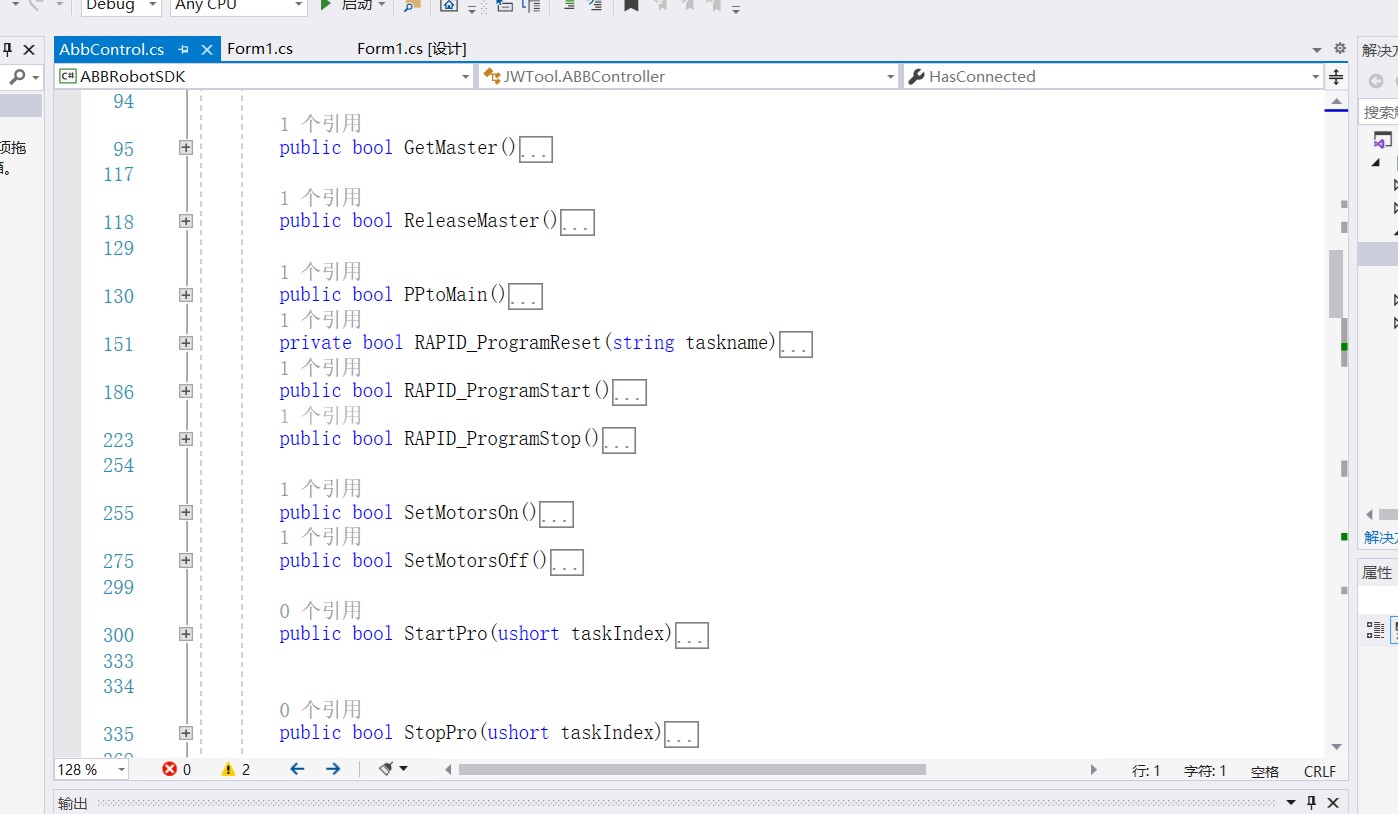
首先,咱自己写了个ABB机器人类,这个类涵盖了机器人常规操作功能,为二次开发奠定了良好基础。假设我们定义了这样一个类ABB_Robot:
csharp
public class ABB_Robot
{
// 模拟机器人连接状态
private bool isConnected;
// 模拟当前点位信息
private Point currentPosition;
// 构造函数
public ABB_Robot()
{
isConnected = false;
currentPosition = new Point(0, 0, 0);
}
// 连接机器人方法
public void Connect()
{
// 这里模拟实际连接逻辑,比如通过网络连接等
isConnected = true;
Console.WriteLine("机器人已连接");
}
// 断开机器人连接方法
public void Disconnect()
{
isConnected = false;
Console.WriteLine("机器人已断开连接");
}
// 获取当前点位信息方法
public Point GetCurrentPosition()
{
if (isConnected)
{
// 这里模拟实际获取点位的逻辑,可能从机器人控制器读取
return currentPosition;
}
else
{
Console.WriteLine("机器人未连接,无法获取点位信息");
return null;
}
}
// 写入点位信息方法
public void SetPosition(Point newPosition)
{
if (isConnected)
{
currentPosition = newPosition;
Console.WriteLine($"已将点位设置为: X={newPosition.X}, Y={newPosition.Y}, Z={newPosition.Z}");
}
else
{
Console.WriteLine("机器人未连接,无法设置点位信息");
}
}
}
// 简单的点位结构体
public struct Point
{
public double X { get; set; }
public double Y { get; set; }
public double Z { get; set; }
public Point(double x, double y, double z)
{
X = x;
Y = y;
Z = z;
}
}上面代码里,ABB_Robot类封装了机器人的连接、断开、获取点位和设置点位等操作。Connect方法模拟建立与机器人的连接,Disconnect方法则是断开连接。GetCurrentPosition方法在机器人连接状态下返回当前点位信息,要是没连接就提示无法获取。SetPosition方法同理,在连接时设置新的点位信息。
接下来看看怎么在实际应用中使用这个类:
csharp
class Program
{
static void Main()
{
ABB_Robot robot = new ABB_Robot();
robot.Connect();
// 获取当前点位信息
Point currentPoint = robot.GetCurrentPosition();
if (currentPoint!= null)
{
Console.WriteLine($"当前点位: X={currentPoint.X}, Y={currentPoint.Y}, Z={currentPoint.Z}");
}
// 写入新的点位信息
Point newPoint = new Point(100, 200, 300);
robot.SetPosition(newPoint);
robot.Disconnect();
}
}在Main方法里,我们先实例化了ABB_Robot类,接着连接机器人,获取并输出当前点位信息,然后设置新的点位,最后断开连接。
通过这种方式,利用C#结合自定义的ABB机器人类,就能轻松实现对ABB机器人点位信息的读取和写入,为ABB机器人的二次开发提供了有力支持,满足各种复杂的自动化任务需求。无论是工业生产线上的精准定位,还是科研项目中的特定动作控制,都能借助这样的开发方式灵活实现。