一、研究背景
1.1 研究领域
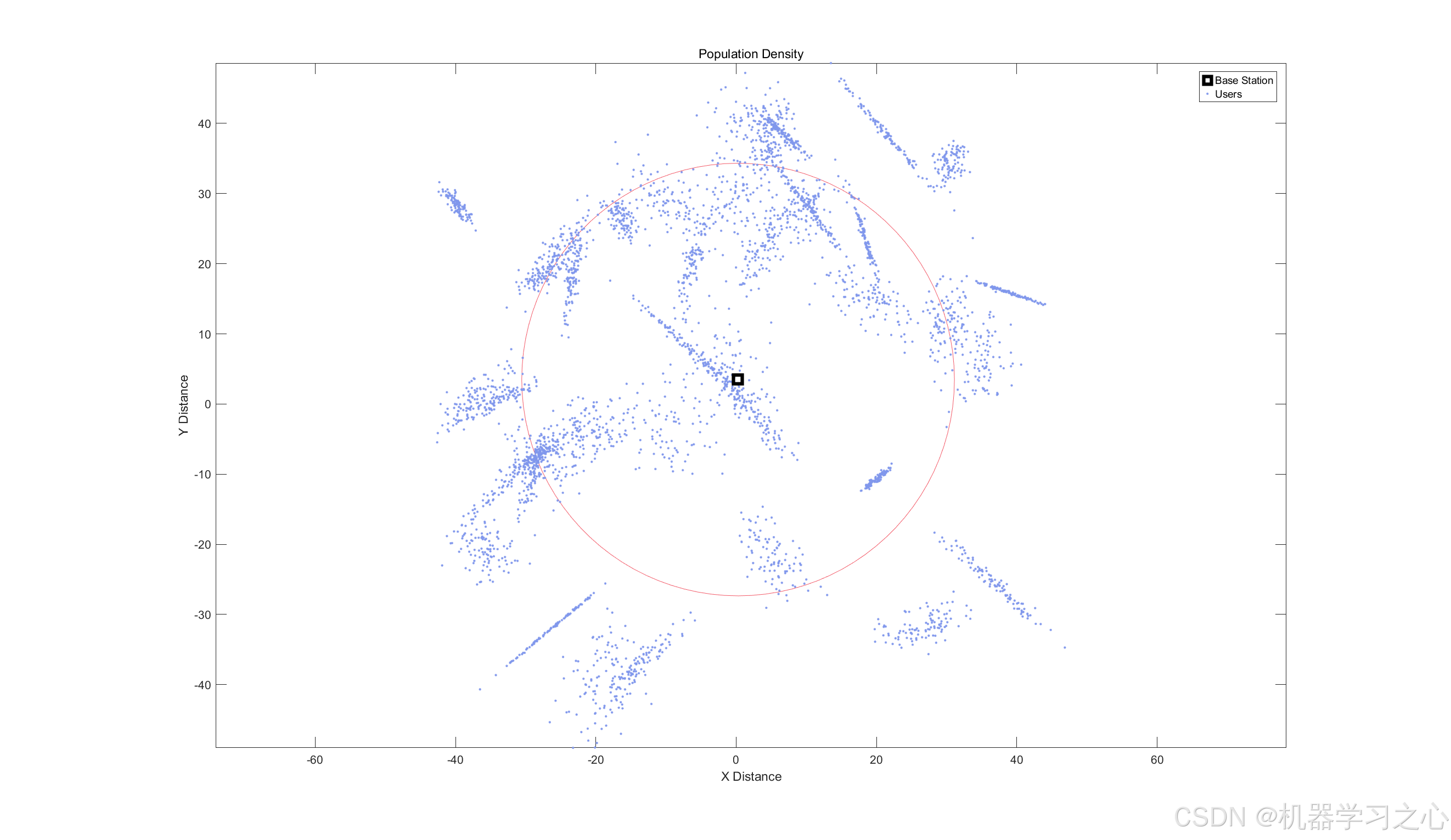
本代码属于无人机辅助无线通信网络 研究领域,特别关注无人机中继网络优化。随着5G/6G无线通信技术的发展,无人机作为空中移动基站/中继节点,在应急通信、热点区域覆盖、物联网数据收集等场景中展现出巨大潜力。
1.2 核心问题
- 无人机部署优化:如何在三维空间中合理部署无人机,以最小化能耗、最大化覆盖范围和服务质量
- 资源分配优化:如何动态调整无人机的发射功率和飞行高度,以适应变化的用户分布和信道条件
- 网络拓扑优化:如何构建高效的无人机中继网络,确保从基站到边缘用户的高可靠、低延迟通信
二、主要功能
2.1 核心功能模块
| 模块名称 | 主要功能 | 关键技术 |
|---|---|---|
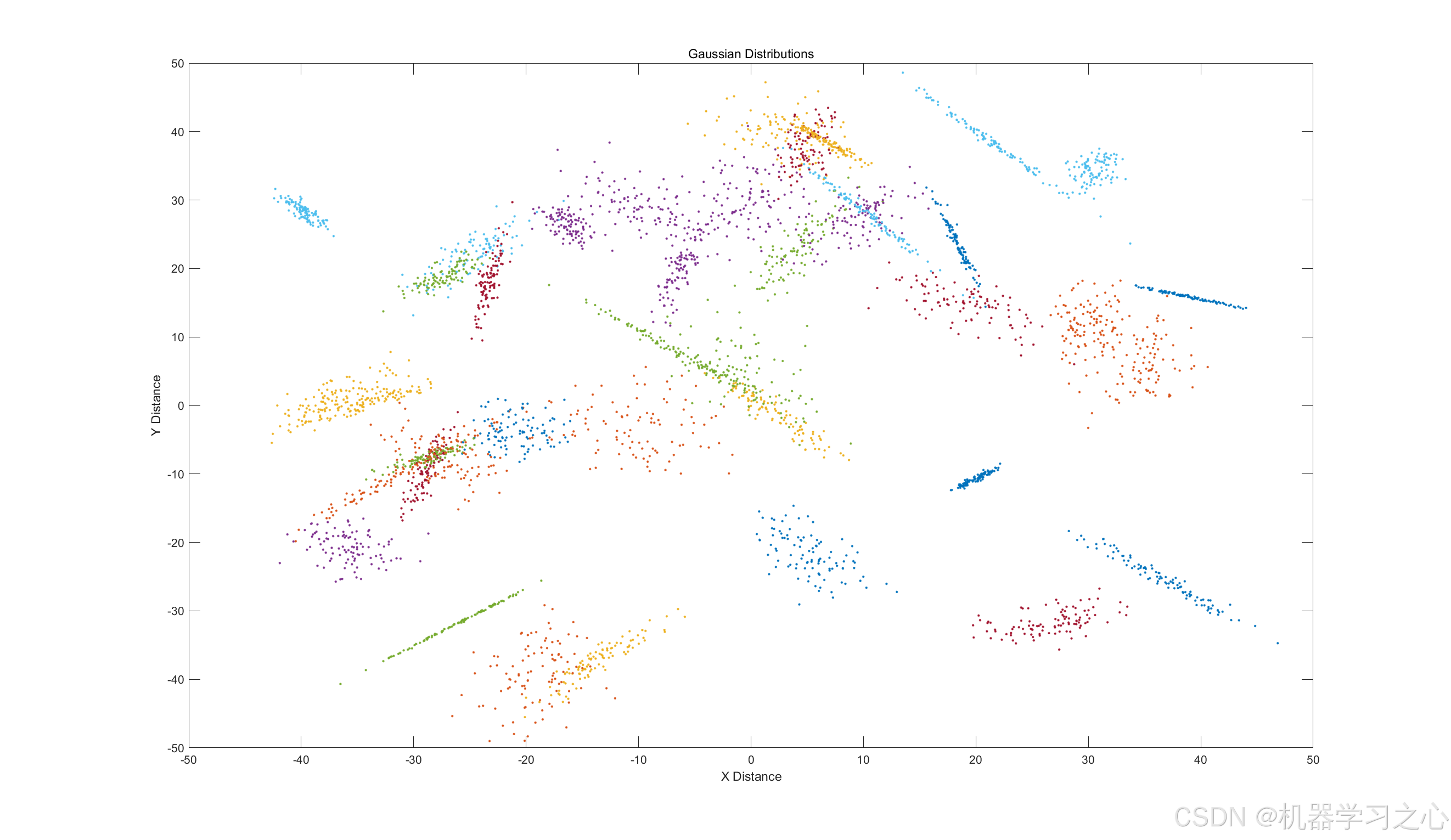
| 数据生成模块 | 模拟真实用户分布 | 高斯混合模型、随机分布生成 |
| 聚类分析模块 | 对用户进行分组管理 | K-means聚类算法 |
| 参数优化模块 | 优化无人机功率和高度 | 约束优化算法 |
| 位置计算模块 | 确定无人机最优放置位置 | 几何计算、通信模型 |
| 网络规划模块 | 构建无人机中继网络 | 图论、Dijkstra算法 |
| 性能评估模块 | 评估不同方案的效果 | 信道容量计算、能量效率分析 |
2.2 仿真流程
- 场景生成 → 2. 用户聚类 → 3. 参数优化 → 4. 位置计算 → 5. 网络规划 → 6. 性能评估
三、算法步骤详解
3.1 整体算法流程
开始
生成高斯分布用户数据
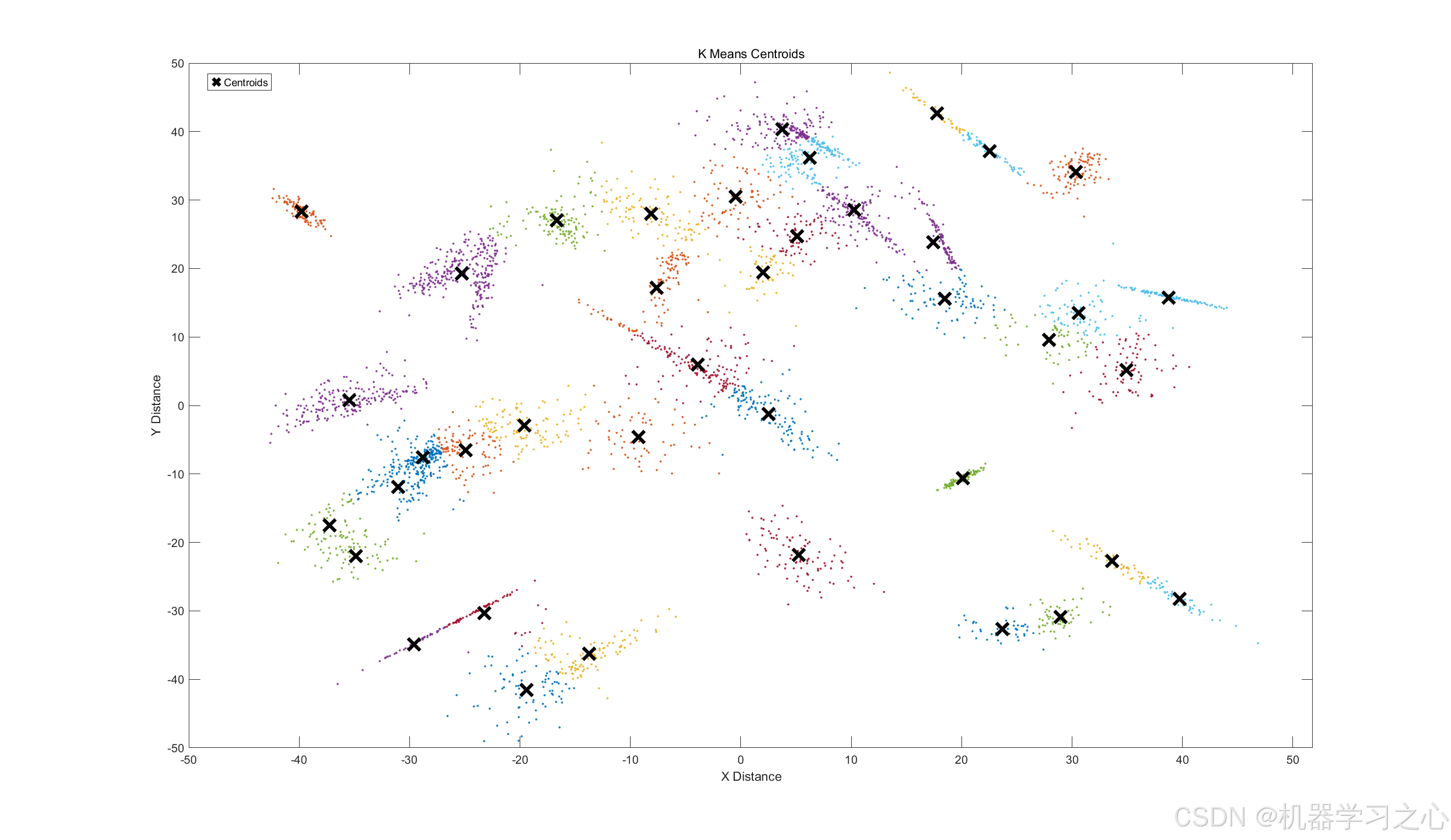
K-means聚类分析
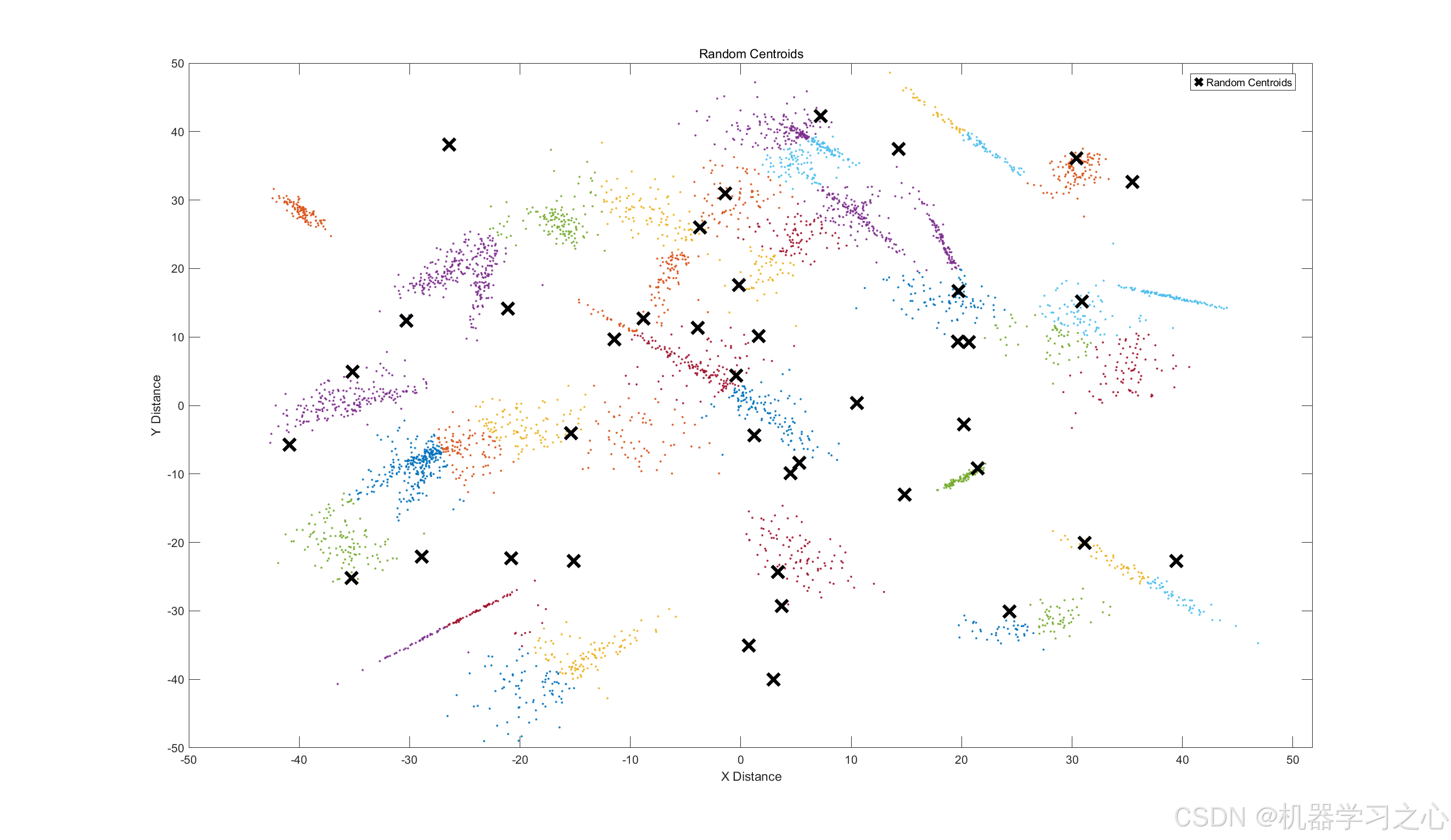
计算随机放置基准
优化无人机功率和高度
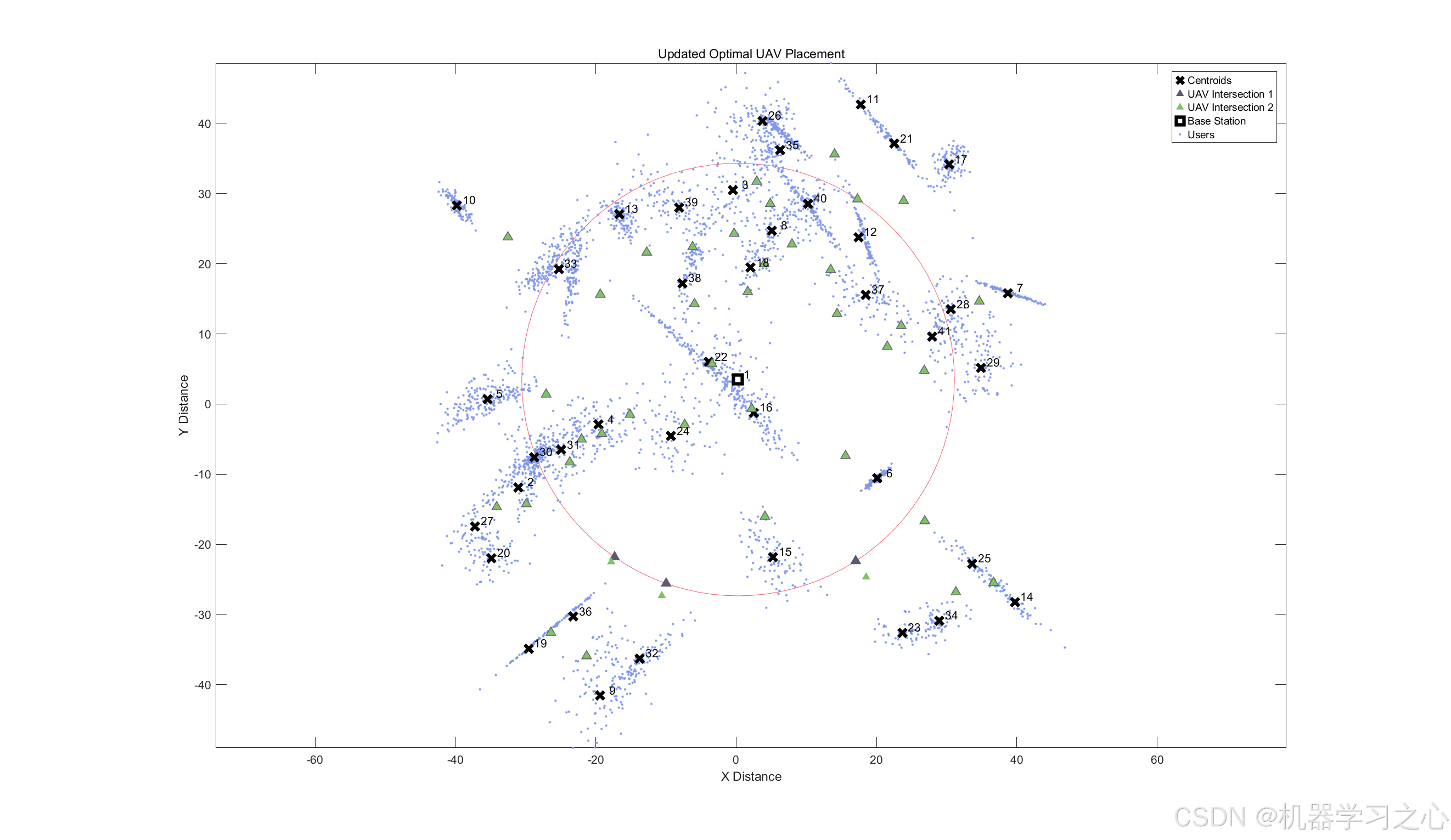
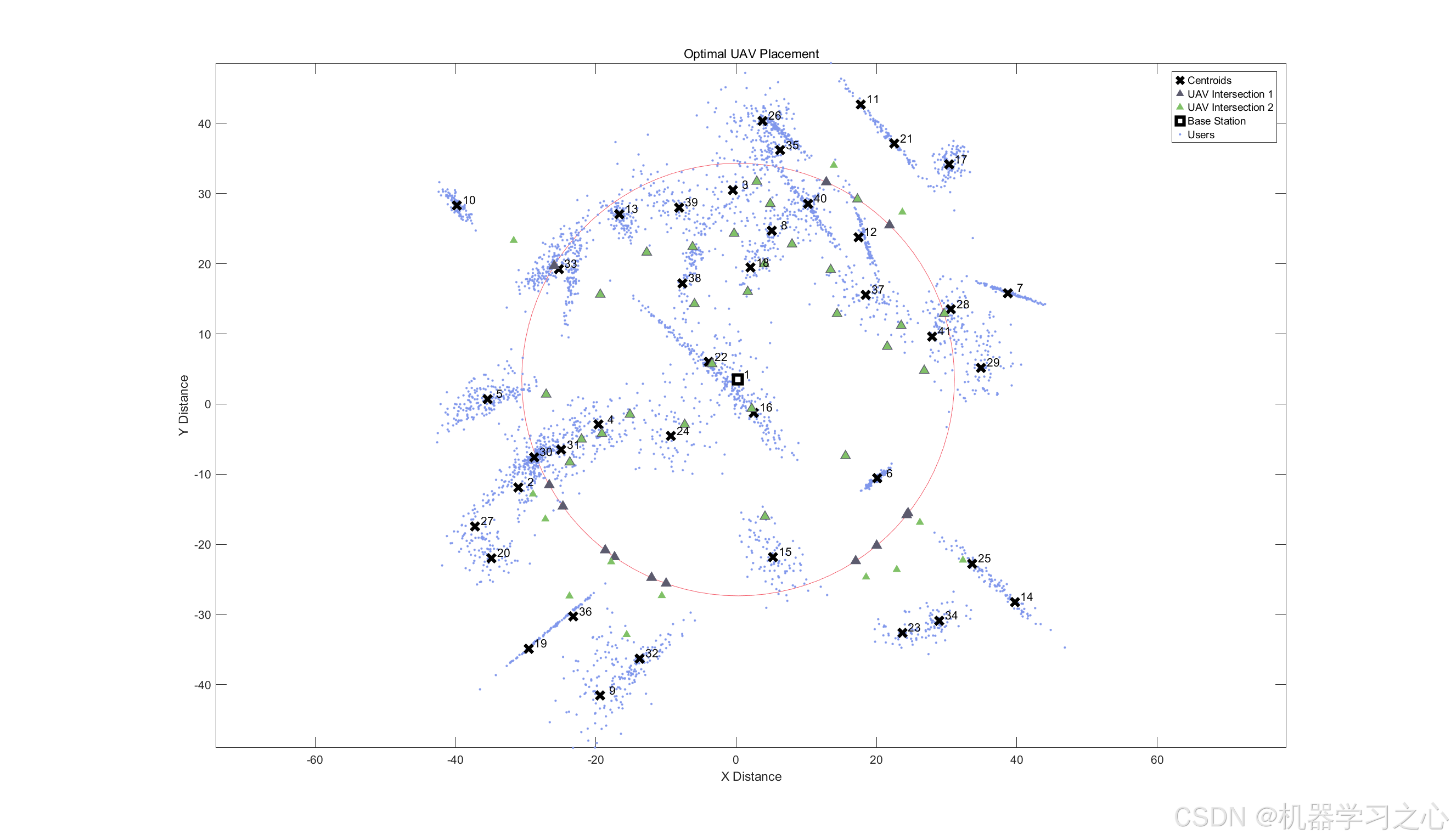
计算最优UAV位置
构建图模型并应用Dijkstra算法
更新UAV中继位置
性能评估与比较
可视化与结果输出
结束
3.2 关键算法步骤
3.2.1 K-means聚类算法
- 初始化:随机选择k个初始聚类中心
- 分配步骤:将每个数据点分配到最近的聚类中心
- 更新步骤:重新计算每个聚类的中心点
- 迭代:重复步骤2-3直到收敛
3.2.2 Dijkstra最短路径算法
- 初始化:设置所有节点距离为无穷大,起点距离为0
- 选择未访问节点:选择距离最小的未访问节点
- 更新邻居距离:更新该节点所有邻居的距离
- 标记已访问:标记该节点为已访问
- 重复:重复步骤2-4直到所有节点被访问
3.2.3 无人机位置优化算法
- 建立通信模型:基于信道容量公式建立数学模型
- 设置约束条件:功率约束、高度约束、覆盖约束
- 求解最优解:使用数值方法求解满足约束的最优参数
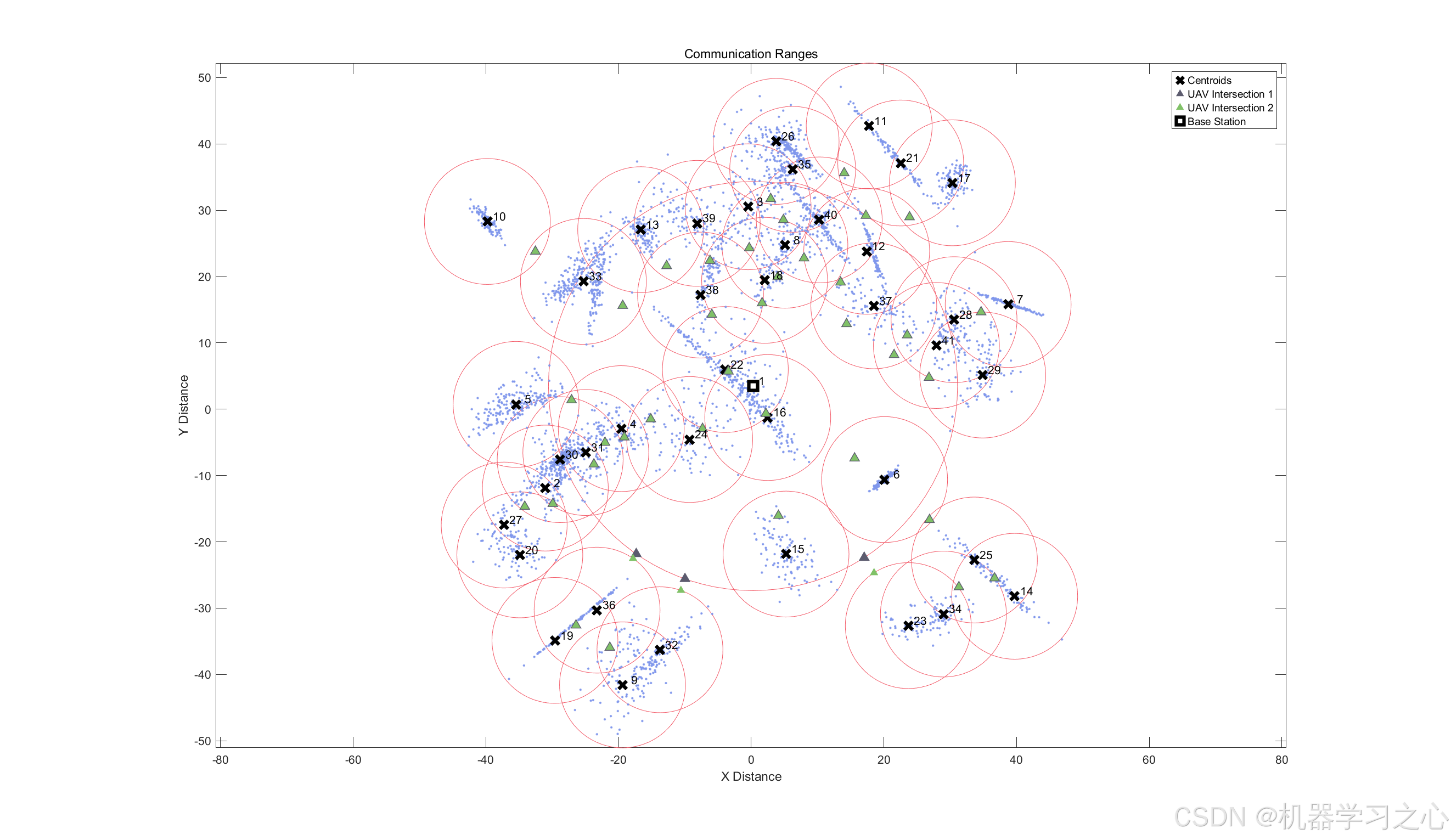
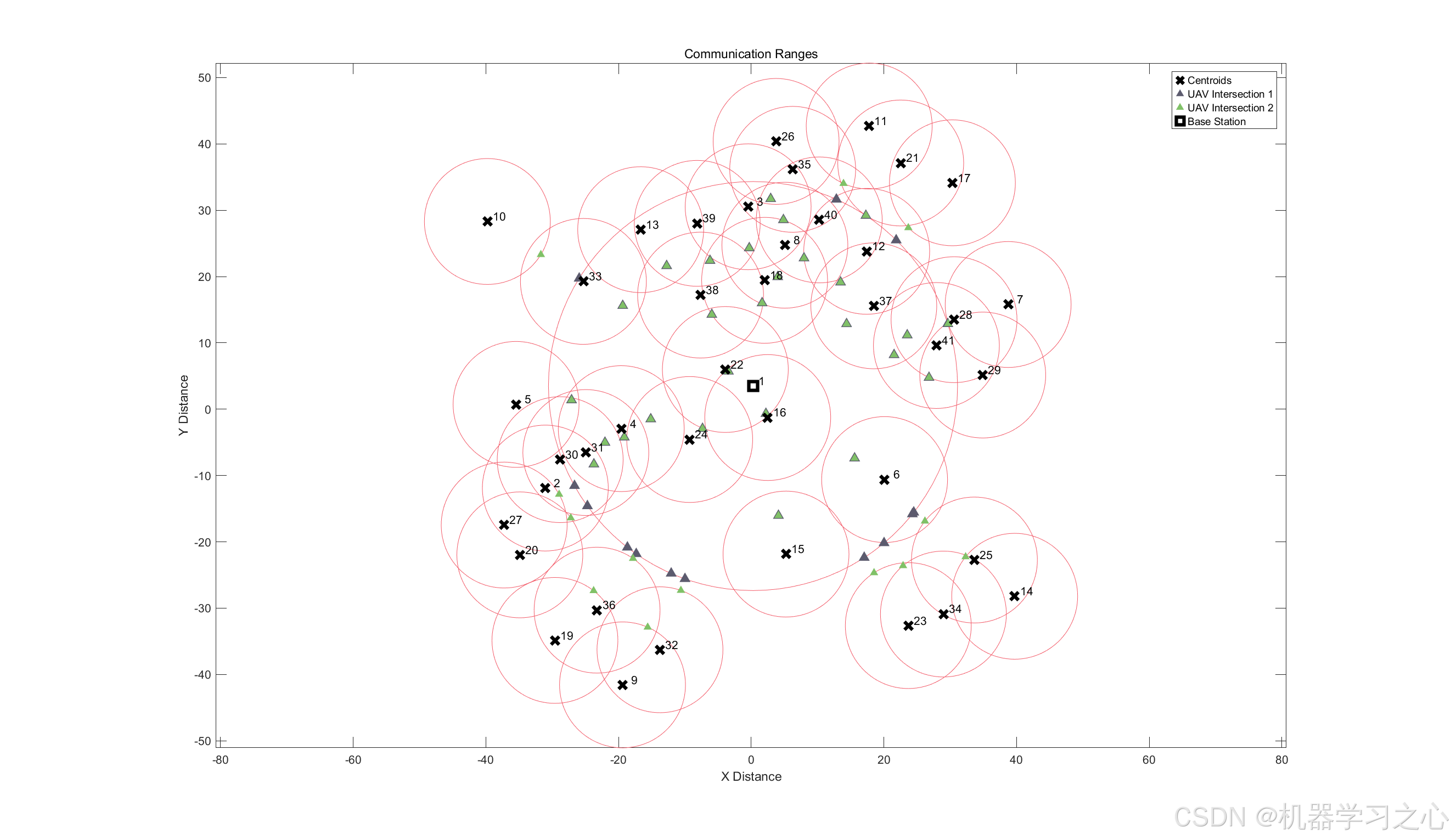
- 计算几何位置:基于覆盖半径计算UAV可能位置
四、技术路线
4.1 整体技术架构
数据层(用户分布模拟)
↓
算法层(聚类优化、图论优化)
↓
模型层(通信模型、能量模型)
↓
评估层(性能指标计算)
↓
展示层(可视化输出)4.2 关键技术路线
-
基于聚类的分区域管理
- 使用K-means将用户分组
- 为每个区域独立优化UAV参数
- 降低整体优化复杂度
-
双层优化策略
- 第一层:单个UAV的功率和高度优化
- 第二层:多UAV网络的拓扑优化
-
多目标权衡优化
- 信道容量最大化
- 能量消耗最小化
- 服务用户数最大化
五、公式原理
5.1 核心通信模型公式
5.1.1 信道容量公式
C = B × log₂(1 + SNR)其中:
- C:信道容量(bps/Hz)
- B:带宽(Hz)
- SNR:信噪比
5.1.2 信噪比计算
SNR = P / ((d² + h²) × σ²)其中:
- P:发射功率(W)
- d:水平距离(m)
- h:垂直高度(m)
- σ²:噪声方差
5.1.3 覆盖半径求解
通过解方程得到满足最小信道容量要求的覆盖半径:
B × log₂(1 + P/((r² + h²) × σ²)) = C_min5.2 能量消耗模型
5.2.1 总能量消耗
E_total = E_communication + E_mobility其中:
- E_communication:通信能耗 ∝ 通信距离 × w_com
- E_mobility:移动能耗 ∝ 移动距离 × w_mot
5.2.2 图中边的权重计算
if dist ≥ r1 + r2:
weight = (dist - r1 - r2) × w_mot + (r1 + r2) × w_com
else:
weight = dist × w_com六、参数设定
6.1 系统级参数
| 参数类别 | 参数名称 | 默认值 | 单位 | 说明 |
|---|---|---|---|---|
| 场景参数 | 聚类数量 | 40 | 个 | 高斯分布的数量 |
| 每聚类用户数 | 100 | 个 | 每个高斯分布的用户数 | |
| 均值范围 | -40, 40 | m | 用户分布的均值范围 | |
| 方差范围 | 0, 10 | m² | 用户分布的方差范围 | |
| UAV参数 | 功率阈值 | 10 | W | UAV最大发射功率 |
| 高度阈值 | 0.5 | m | UAV最小飞行高度 | |
| UAV带宽 | 5 | MHz | UAV通信带宽 | |
| 基站参数 | 基站功率 | 50 | W | 基站发射功率 |
| 基站带宽 | 10 | MHz | 基站通信带宽 | |
| 基站高度 | 0.1 | m | 基站天线高度 | |
| 信道参数 | 路径损耗系数 | 0.5 | - | 路径损耗指数 |
| 噪声方差 | 0.5 | W | 信道噪声功率 | |
| 容量阈值 | 1 | bps/Hz | 最小信道容量要求 | |
| 图论参数 | 通信权重 | 1 | - | 通信能耗系数 |
| 移动权重 | 5 | - | 移动能耗系数 |
6.2 参数敏感性分析
- 聚类数量:影响计算复杂度和覆盖精度
- 功率阈值:直接影响信道容量和覆盖范围
- 权重系数:决定通信与移动的能耗权衡
七、运行环境
7.1 环境要求
| 组件 | 版本要求 | 必需/可选 | 备注 |
|---|---|---|---|
| MATLAB | R2018a或更高 | 必需 | 核心仿真平台 |
7.2 文件结构
uav_placement.m # 主程序文件
generate_data.m # 数据生成函数
optimal_points.m # 最优位置计算函数
optimize_pow_height_cluster.m # 参数优化函数
*.png # 自动保存的图形文件八、应用场景
8.1 典型应用领域
| 应用领域 | 具体场景 | 系统优势 |
|---|---|---|
| 应急通信 | 自然灾害后通信恢复 | 快速部署、灵活覆盖 |
| 热点区域 | 体育赛事、音乐会 | 按需增加容量、避免拥塞 |
| 农村覆盖 | 偏远地区网络覆盖 | 低成本、广覆盖 |
| 物联网 | 大规模传感器数据收集 | 能量高效、动态调度 |
| 军事通信 | 战场通信网络 | 抗毁性强、机动性高 |
8.2 扩展应用方向
-
智能城市
- 交通监控网络
- 环境监测网络
- 公共安全网络
-
精准农业
- 农田监测网络
- 自动化灌溉控制
- 作物生长监控
-
工业物联网
- 工厂设备监控
- 供应链跟踪
- 自动化仓储管理
8.3 性能指标应用
- 运营商:用于规划无人机基站部署,最大化投资回报率
- 应急部门:用于设计应急通信网络,最小化响应时间
- 研究机构:用于验证新型无人机通信算法和协议
九、创新点与优势
9.1 主要创新点
- 分层优化框架:将复杂的无人机网络优化问题分解为可管理的子问题
- 多目标权衡:同时考虑信道容量、能量效率和覆盖范围多个目标
- 动态适应能力:算法能够根据用户分布变化自动调整UAV部署
- 实用导向设计:考虑实际通信约束和无人机物理限制
9.2 系统优势
- 可扩展性强:通过调整聚类数量适应不同规模场景
- 计算效率高:使用聚类减少优化变量数量
- 结果可视化好:丰富的图形输出便于结果分析和展示
- 参数可配置:灵活的参数设置支持不同应用需求
十、总结
本UAV优化放置仿真系统提供了一个完整的框架,用于研究无人机辅助无线通信网络的优化部署问题。系统通过K-means聚类 对用户进行分组管理,通过双层优化策略 确定每个UAV的最优参数和位置,并通过图论方法 构建高效的中继网络。系统具有参数可配置 、结果可视化 、性能可评估 等特点,适用于多种应用场景的研究和评估。