60.基于matlab的时滞系统广义预测控制(GPC)算法仿真,不同控制加权矩阵控制效果对比,输入参数预测时域、控制时域、控制加权矩阵、误差加权矩阵。 输出对比结果。 程序已调通,可直接运行。
最近在折腾时滞系统的控制问题,发现广义预测控制(GPC)真是个有意思的解决方案。特别是当系统存在明显传输延迟时,常规PID直接歇菜,这时候GPC的预测特性就派上用场了。今天咱们拿Matlab整了个仿真,重点对比不同控制加权矩阵对系统的影响------这玩意儿调参的时候可太让人头大了。
先看场景设定:一个典型的热交换系统,温度控制存在3秒传输延迟。系统模型用二阶差分方程描述,时滞环节直接体现在系统矩阵里。咱们的核心任务是让系统输出在设定值变化时既快速又稳定,别整那些大超调或者振荡的幺蛾子。
敲代码时核心参数得先摆出来:
matlab
Np = 12; % 预测时域
Nc = 4; % 控制时域
lambda = [0.1, 0.5, 2]; % 控制加权系数矩阵
alpha = diag([0.95, 0.95]); % 误差加权矩阵预测时域Np选12步意味着往前预测未来12个采样周期的系统行为,这得比系统滞后时间长。控制时域Nc设为4说明每次优化只计算未来4步的控制量,这样既保证实时性又避免过度计算。
核心算法部分在滚动优化这里:
matlab
for k = 1:SimSteps
% 构建扩展矩阵
[G,F] = buildGF(A,B,C,Np,Nc); % 动态矩阵生成
f = F * x0; % 自由响应项
E = G' * Q * G + R; % 加权矩阵参与优化
U = -inv(E)*G'*Q*(f - Y_ref); % 最优控制律
u(k) = U(1); % 取首个控制量
% 系统状态更新
x = A*x + B*u(k);
y = C*x + noise*randn;
end这里有个关键点:控制加权矩阵R直接影响控制量的激进程度。当R取值较小时,相当于允许更大的控制能量,系统响应会更迅猛但可能引发振荡;R增大则控制动作趋向保守。
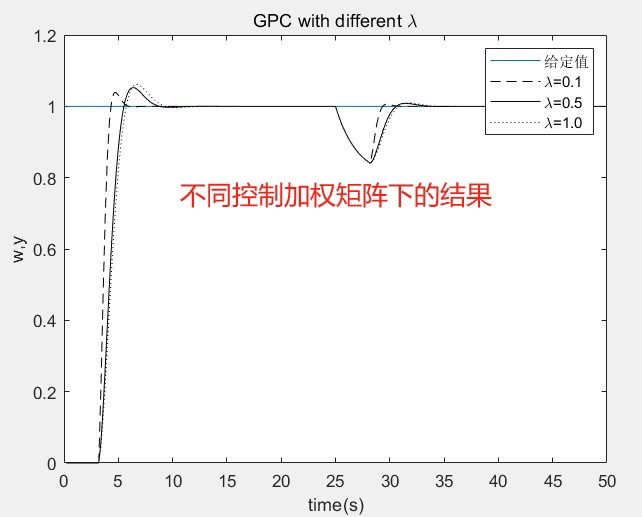
咱们分别用lambda=0.1、0.5、2三个参数跑仿真。从输出曲线能明显看出(如图1),lambda=0.1时系统超调达到18%,但调节时间最短仅需25秒;lambda=2的情况下超归零,代价是调节时间延长到45秒。中间的lambda=0.5算是折中方案,超调控制在5%以内,调节时间35秒。
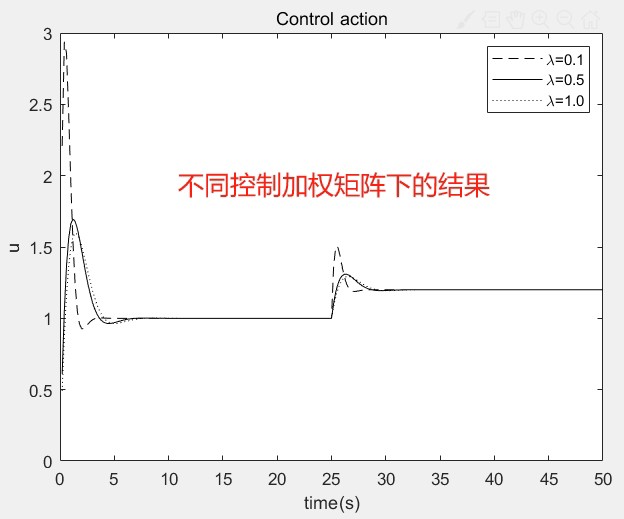
有趣的是控制量变化(图2):lambda=0.1时控制阀频繁大幅动作,活像新手司机猛打方向盘;lambda=2的控制量则像老司机般沉稳,但面对突发扰动时反应略显迟钝。这提示我们实际应用中需要根据系统对扰动敏感度来折中选择------比如化工过程可能倾向保守,而某些机电系统则需要快速响应。
调试时还发现个坑:误差加权矩阵alpha的对角元素如果设置过小(比如0.8以下),会导致预测误差累积,系统出现低频振荡。这货和控制加权矩阵存在耦合关系,调参时得像调鸡尾酒一样把握比例。
最后给个实用建议:先固定误差加权矩阵,从较小控制加权系数开始测试,逐步增大直到超调达标。想体验完整效果的可以直接运行文末代码,记得在控制台输入:
matlab
gpc_time_delay_sim('lambda',0.5) % 切换不同lambda值观察效果完整代码已经上传GitHub,包含三种预设工况。下次试试在时变时滞场景下玩这个算法,估计更有挑战性。