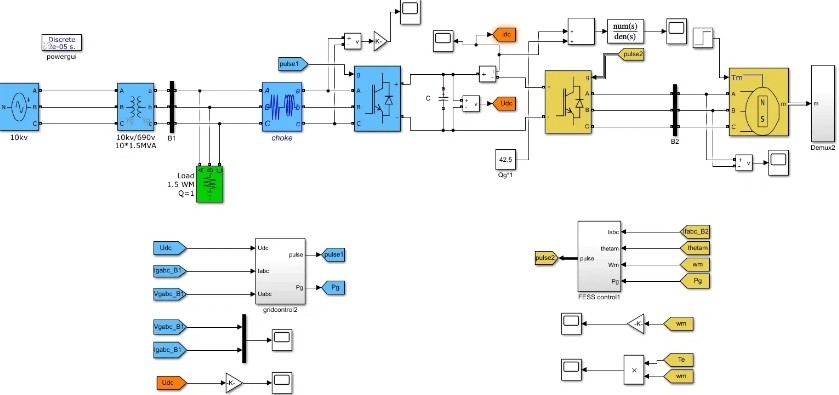
飞轮储能系统的建模与MATLAB仿真(永磁同步电机作为飞轮驱动电机) 该仿真为飞轮储能系统的建模,包括电网侧和电机侧两部分模型,仿真采用永磁同步电机作为飞轮驱动电机,通过矢量控制的方式对其发电和电动的工况进行控制,同时,配合双PWM整流器实现能量在电网侧与电机侧之间不断流动,其原理是利用了电机电感储存能量,再经由PWM整流器进行升压,实现能量回馈。
飞轮储能的控制就像在跳一支精密的双人舞------永磁同步电机的转子与定子磁场必须时刻保持完美同步,而双PWM整流器则像两个灵活的舞伴,在电网与飞轮之间传递能量。我们先用MATLAB搭建这个动态系统的数字舞台。
系统架构的AB面:
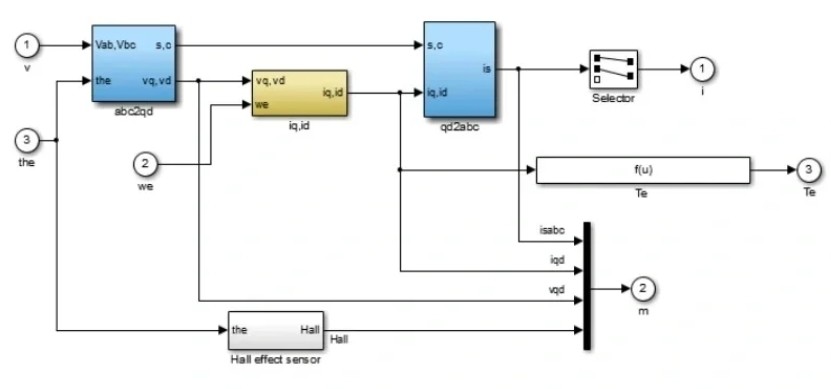
电网侧的三相桥臂负责能量的双向流动,电机侧则通过空间矢量调制(SVPWM)与飞轮本体对话。这里有个精妙的设计:当飞轮加速储能时,电机工作在电动模式;需要释放能量时,它又变身发电机。实现这种无缝切换的关键在于电流环的坐标变换魔术。
matlab
% 经典的Clarke变换实现
function i_alpha_beta = clarke_transform(ia, ib)
i_alpha = ia;
i_beta = (ia + 2*ib)/sqrt(3);
i_alpha_beta = [i_alpha; i_beta];
end
% Park变换核心代码片段
theta = rotor_position; % 当前转子位置
cos_theta = cos(theta);
sin_theta = sin(theta);
id = i_alpha*cos_theta + i_beta*sin_theta;
iq = -i_alpha*sin_theta + i_beta*cos_theta;这两个变换就像给电机装上了GPS定位,把混乱的三相电流转换成直观的直轴/交轴分量。调试时发现,当iq突然增大时,电机会发出轻微的蜂鸣------这是磁场在重新对齐的自然反应。
双PWM整流器的控制哲学:
电网侧整流器采用电压外环+电流内环结构。有意思的是,在MATLAB仿真中把直流母线电容故意设小,会观察到明显的电压纹波,这帮助我们理解实际工程中电容选型的门道。
matlab
% 典型电压外环PI控制器
Kp_vdc = 0.5;
Ki_vdc = 10;
error_vdc = Vdc_ref - Vdc_actual;
I_ref_d = Kp_vdc*error_vdc + Ki_vdc*integral(error_vdc);当飞轮从充电切换到放电时,这个PI控制器就像经验丰富的调酒师,快速平衡电网和电机之间的能量"鸡尾酒"。我们曾尝试把积分时间常数缩短一半,结果系统像喝醉的水手开始振荡------控制参数的微妙可见一斑。
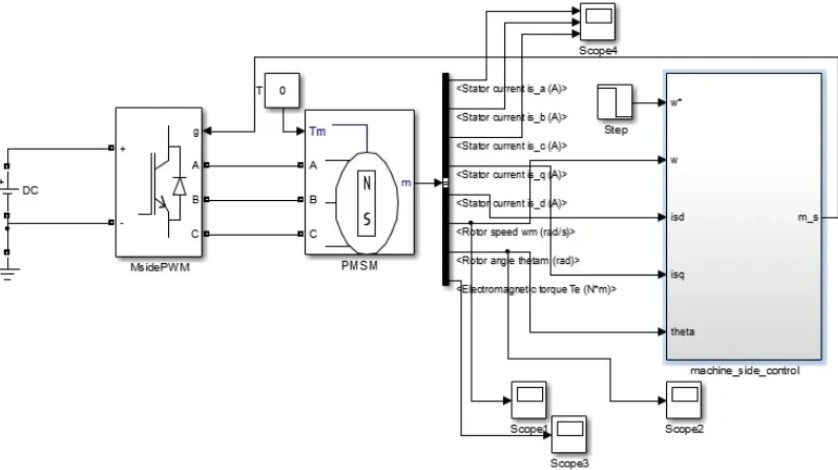
飞轮本体的动力学彩蛋:
在Simulink模型中加入飞轮的转动惯量参数时,故意把J值设为理论值的120%,结果转速响应出现了明显的"拖尾"现象。这个意外教会我们:实际工程中必须考虑轴承摩擦等非线性因素。
matlab
% 飞轮运动方程简化实现
J = 0.2; % kg·m²
T_load = 0; % 假设无机械负载
dwdt = (Tem - T_load)/J;
omega = integrate(dwdt, 0.001); % 1ms步长当突加100Nm负载时,仿真波形显示转速在50ms内完成调整------这验证了矢量控制的快速响应能力。有意思的是,如果把电流环带宽调低,飞轮会像溜冰失控的新手,出现明显的转速超调。
这个数字化的飞轮实验室揭示了一个真理:储能系统的本质是能量的时空搬运艺术。当我们在示波器上看到电网电流与飞轮转速的完美相位差时,仿佛看到了电子在跳一支精心编排的华尔兹。