超越循环前缀限制的 OFDM-ISAC:迭代 SIC-DFT 原理解析
前言
一体化感知与通信(Integrated Sensing and Communication,ISAC)是 5G/6G 时代的重要方向之一。基于 OFDM 的蜂窝波形具有大带宽、高频谱利用率等优势,因此被广泛视为实现 ISAC 的候选体制。然而,传统 OFDM 雷达建模大多假设目标往返时延完全落在循环前缀(CP)长度之内,从而可以忽略符号间干扰(ISI)与载波间干扰(ICI)。在大距离、高载频(如 28 GHz 毫米波)场景下,这一假设经常不再成立。
一、系统模型与基本参数
1.1 OFDM 信号与带宽
考虑一个典型的 OFDM-ISAC 系统,采用 N N N 个子载波、 M M M 个连续 OFDM 符号,子载波间隔为 Δ f \Delta f Δf,信号总带宽为 B B B。则有
B = N Δ f B = N \Delta f B=NΔf
式中:
-
B B B 为 OFDM 信号总带宽,单位为 Hz \text{Hz} Hz;
-
N N N 为子载波数;
-
Δ f \Delta f Δf 为子载波间隔,单位为 Hz \text{Hz} Hz。
有效符号时长(不含 CP)为
T = 1 Δ f T = \frac{1}{\Delta f} T=Δf1
式中:
-
T T T 为每个 OFDM 符号的有效时长,单位为 s \text{s} s;
-
Δ f \Delta f Δf 含义同上。
在每个符号上添加长度为 T cp T_{\text{cp}} Tcp 的循环前缀(CP),则符号总时长为
T s = T + T cp T_s = T + T_{\text{cp}} Ts=T+Tcp
式中:
-
T s T_s Ts 为包含 CP 的 OFDM 符号总时长,单位为 s \text{s} s;
-
T T T 为有效符号时长;
-
T cp T_{\text{cp}} Tcp 为 CP 时长,单位为 s \text{s} s。
1.2 雷达基本性能指标与 CP 限制
假设信号在自由空间传播,光速为 c 0 c_0 c0,则基于带宽 B B B 的距离分辨率为
Δ R = c 0 2 B \Delta R = \frac{c_0}{2B} ΔR=2Bc0
式中:
-
Δ R \Delta R ΔR 为距离分辨率,单位为 m \text{m} m;
-
c 0 c_0 c0 为光速,约 3 × 1 0 8 m/s 3\times 10^8\ \text{m/s} 3×108 m/s;
-
B B B 为信号带宽。
若对第一个维度(子载波方向)做 N N N 点 FFT,则 RDM 的距离轴上最大可显示距离近似为
R max RDM ≈ ( N − 1 ) Δ R R_{\max}^{\text{RDM}} \approx (N-1)\Delta R RmaxRDM≈(N−1)ΔR
式中:
-
R max RDM R_{\max}^{\text{RDM}} RmaxRDM 为 RDM 上最大距离刻度,单位为 m \text{m} m;
-
N N N 为子载波数;
-
Δ R \Delta R ΔR 为距离分辨率。
若希望目标回波在时域卷积后仍保持循环卷积结构(从而保持子载波正交性),则目标最大往返时延应不超过 CP 长度,即
2 R c 0 ≤ T cp \frac{2R}{c_0} \le T_{\text{cp}} c02R≤Tcp
式中:
-
R R R 为目标距离,单位为 m \text{m} m;
-
c 0 c_0 c0 为光速;
-
T cp T_{\text{cp}} Tcp 为 CP 时长。
由此可得在 CP 限制下无 ISI 的最大距离为
R max CP = c 0 T cp 2 R_{\max}^{\text{CP}} = \frac{c_0 T_{\text{cp}}}{2} RmaxCP=2c0Tcp
式中:
-
R max CP R_{\max}^{\text{CP}} RmaxCP 为 CP 条件下无 ISI 的最大感知距离,单位为 m \text{m} m;
-
c 0 c_0 c0 为光速;
-
T cp T_{\text{cp}} Tcp 为 CP 时长。
可以看到,当 R R R 远大于 R max CP R_{\max}^{\text{CP}} RmaxCP 时,即使 RDM 频域轴仍能表示该距离(由 Δ R \Delta R ΔR 和 N N N 决定),时域上 CP 已不足以覆盖多径延迟,将不可避免地产生 ISI 与 ICI。
1.3 多普勒分辨率与无模糊速度
以 OFDM 符号重复周期 T s T_s Ts 作为脉冲重复周期(PRF),则
PRF = 1 T s \text{PRF} = \frac{1}{T_s} PRF=Ts1
式中:
-
PRF \text{PRF} PRF 为脉冲重复频率,单位为 Hz \text{Hz} Hz;
-
T s T_s Ts 为 OFDM 符号总时长。
在观测 M M M 个连续 OFDM 符号的条件下,多普勒频率分辨率为
Δ f d = 1 M T s \Delta f_d = \frac{1}{M T_s} Δfd=MTs1
式中:
-
Δ f d \Delta f_d Δfd 为多普勒频率分辨率,单位为 Hz \text{Hz} Hz;
-
M M M 为连续 OFDM 符号数;
-
T s T_s Ts 为符号周期。
若载波频率为 f c f_c fc,目标径向速度 v v v 与多普勒频移 f d f_d fd 的关系为
f d = 2 v f c c 0 f_d = \frac{2 v f_c}{c_0} fd=c02vfc
式中:
-
f d f_d fd 为多普勒频移,单位为 Hz \text{Hz} Hz;
-
v v v 为目标径向速度,单位为 m/s \text{m/s} m/s;
-
f c f_c fc 为载波频率,单位为 Hz \text{Hz} Hz;
-
c 0 c_0 c0 为光速。
由上两式可得速度分辨率
Δ v = c 0 2 f c Δ f d = c 0 2 f c M T s \Delta v = \frac{c_0}{2 f_c} \Delta f_d = \frac{c_0}{2 f_c M T_s} Δv=2fcc0Δfd=2fcMTsc0
式中:
-
Δ v \Delta v Δv 为速度分辨率,单位为 m/s \text{m/s} m/s;
-
c 0 c_0 c0 为光速;
-
f c f_c fc 为载波频率;
-
M M M 为 OFDM 符号数;
-
T s T_s Ts 为符号周期。
在均匀采样的多普勒频率轴上,无模糊多普勒频率范围为 ± 1 2 T s \pm \tfrac{1}{2T_s} ±2Ts1,对应的速度无模糊范围为
∣ v ∣ max = c 0 4 f c T s \lvert v \rvert_{\max} = \frac{c_0}{4 f_c T_s} ∣v∣max=4fcTsc0
式中:
-
∣ v ∣ max \lvert v \rvert_{\max} ∣v∣max 为无模糊最大速度的绝对值,单位为 m/s \text{m/s} m/s;
-
c 0 c_0 c0、 f c f_c fc、 T s T_s Ts 含义同上。
二、目标与回波信号建模
2.1 目标参数
假设场景中有 Q Q Q 个点目标,第 q q q 个目标的距离与速度分别为 R q R_q Rq 和 v q v_q vq,则其往返时延与多普勒频移为
τ q = 2 R q c 0 , f d , q = 2 v q f c c 0 \tau_q = \frac{2 R_q}{c_0}, \qquad f_{d,q} = \frac{2 v_q f_c}{c_0} τq=c02Rq,fd,q=c02vqfc
式中:
-
τ q \tau_q τq 为第 q q q 个目标的往返传播时延,单位为 s \text{s} s;
-
R q R_q Rq 为第 q q q 个目标的距离,单位为 m \text{m} m;
-
f d , q f_{d,q} fd,q 为第 q q q 个目标的多普勒频移,单位为 Hz \text{Hz} Hz;
-
v q v_q vq 为第 q q q 个目标的径向速度,单位为 m/s \text{m/s} m/s;
-
f c f_c fc 为载波频率,单位为 Hz \text{Hz} Hz;
-
c 0 c_0 c0 为光速。
2.2 频域 QAM 符号矩阵
发射端在每个子载波、每个 OFDM 符号时隙上加载 1024-QAM 调制符号,构成频域数据矩阵
S ∈ C N × M \mathbf{S} \in \mathbb{C}^{N \times M} S∈CN×M
式中:
-
S \mathbf{S} S 为频域调制符号矩阵;
-
C \mathbb{C} C 表示复数域;
-
N N N 为子载波数;
-
M M M 为 OFDM 符号数。
第 n n n 个子载波、第 m m m 个 OFDM 符号上的调制符号记为 S ( n , m ) S(n,m) S(n,m)。通常对星座进行归一化,使
E ∣ S ( n , m ) ∣ 2 = 1 \mathbb{E}\big\\lvert S(n,m) \\rvert\^2\\big = 1 E∣S(n,m)∣2=1
式中:
-
S ( n , m ) S(n,m) S(n,m) 为第 n n n 个子载波、第 m m m 个符号的复调制符号;
-
E ⋅ \mathbb{E}\\cdot E⋅ 为数学期望算子;
-
∣ ⋅ ∣ \lvert \cdot \rvert ∣⋅∣ 为复数的幅度。
2.3 CP 充分时的回波频域模型
在 CP 足够长 (即对所有目标都有 τ q ≤ T cp \tau_q \le T_{\text{cp}} τq≤Tcp)的理想情况下,经过 CP 去除与 FFT 解调后,第 q q q 个目标对频域接收信号的贡献可写为
Y q ( n , m ) = α q b q ( n ) c q ∗ ( m ) S ( n , m ) Y_q(n,m) = \alpha_q b_q(n) c_q^*(m) S(n,m) Yq(n,m)=αqbq(n)cq∗(m)S(n,m)
式中:
-
Y q ( n , m ) Y_q(n,m) Yq(n,m) 为第 q q q 个目标在第 n n n 个子载波、第 m m m 个符号位置的频域回波;
-
α q \alpha_q αq 为第 q q q 个目标的复反射系数(包含路径损耗与散射特性);
-
b q ( n ) b_q(n) bq(n) 为与时延 τ q \tau_q τq 相关的频域"距离导向向量";
-
c q ( m ) c_q(m) cq(m) 为与多普勒频移 f d , q f_{d,q} fd,q 相关的"速度导向向量";
-
c q ∗ ( m ) c_q^*(m) cq∗(m) 为 c q ( m ) c_q(m) cq(m) 的复共轭;
-
S ( n , m ) S(n,m) S(n,m) 为发射的 QAM 符号。
其中,距离导向向量 b q ( n ) b_q(n) bq(n) 和速度导向向量 c q ( m ) c_q(m) cq(m) 为
b q ( n ) = e − j 2 π n Δ f , τ q , n = 0 , ... , N − 1 b_q(n) = e^{-j 2\pi n \Delta f, \tau_q},\quad n = 0,\dots,N-1 bq(n)=e−j2πnΔf,τq,n=0,...,N−1
c q ( m ) = e − j 2 π f d , q m T s , m = 0 , ... , M − 1 c_q(m) = e^{-j 2\pi f_{d,q} m T_s},\quad m = 0,\dots,M-1 cq(m)=e−j2πfd,qmTs,m=0,...,M−1
式中:
-
b q ( n ) b_q(n) bq(n) 为第 q q q 个目标在第 n n n 个子载波上的相位旋转因子;
-
n n n 为子载波索引;
-
Δ f \Delta f Δf 为子载波间隔;
-
τ q \tau_q τq 为目标往返时延;
-
c q ( m ) c_q(m) cq(m) 为第 q q q 个目标在第 m m m 个 OFDM 符号上的多普勒相位因子;
-
m m m 为符号索引;
-
f d , q f_{d,q} fd,q 为多普勒频移;
-
T s T_s Ts 为符号周期;
-
j j j 为虚数单位。
所有目标叠加后,理想"无 ISI/ICI"频域回波矩阵为
Y free ( n , m ) = ∑ q = 1 Q α q b q ( n ) c q ∗ ( m ) S ( n , m ) Y_{\text{free}}(n,m) = \sum_{q=1}^{Q} \alpha_q b_q(n) c_q^*(m) S(n,m) Yfree(n,m)=q=1∑Qαqbq(n)cq∗(m)S(n,m)
式中:
-
Y free ( n , m ) Y_{\text{free}}(n,m) Yfree(n,m) 为在 CP 充分条件下、第 n n n 个子载波、第 m m m 个符号位置的总回波;
-
Q Q Q 为目标个数;
-
其余变量含义同上。
三、超越 CP 限制的频域干扰模型
当存在远距离目标,使得
τ q > T cp \tau_q > T_{\text{cp}} τq>Tcp
时,CP 不足以覆盖其往返时延。此时,时域卷积不再是纯循环卷积,在频域中表现为符号间干扰(ISI)和载波间干扰(ICI)。
3.1 离散延迟与 CP 长度(采样点)
设系统采样率为
F s = B eff F_s = B_{\text{eff}} Fs=Beff
式中:
-
F s F_s Fs 为采样率,单位为 Hz \text{Hz} Hz;
-
B eff B_{\text{eff}} Beff 为有效信号带宽,在该模型中通常取 B eff = B B_{\text{eff}} = B Beff=B。
则 CP 长度对应的采样点数为
N cp = ⌊ T cp F s ⌉ N_{\text{cp}} = \Big\lfloor T_{\text{cp}} F_s \Big\rceil Ncp=⌊TcpFs⌉
式中:
-
N cp N_{\text{cp}} Ncp 为 CP 长度对应的采样点数;
-
T cp T_{\text{cp}} Tcp 为 CP 时长;
-
F s F_s Fs 为采样率;
-
⌊ ⋅ ⌉ \lfloor \cdot \rceil ⌊⋅⌉ 表示取最近整数。
第 q q q 个目标的离散延迟 tap 近似为
ℓ q = ⌊ τ q F s ⌉ \ell_q = \Big\lfloor \tau_q F_s \Big\rceil ℓq=⌊τqFs⌉
式中:
-
ℓ q \ell_q ℓq 为第 q q q 个目标的离散延迟样本数;
-
τ q \tau_q τq 为往返时延;
-
F s F_s Fs 为采样率。
若 ℓ q > N cp \ell_q > N_{\text{cp}} ℓq>Ncp,则 CP 无法完全覆盖该目标的时延,将导致 ISI/ICI。
3.2 超出 CP 的"多余时延"
对于 ℓ q > N cp \ell_q > N_{\text{cp}} ℓq>Ncp 的目标,其超出 CP 的多余时延为
τ q ex = τ q − T cp \tau_q^{\text{ex}} = \tau_q - T_{\text{cp}} τqex=τq−Tcp
式中:
-
τ q ex \tau_q^{\text{ex}} τqex 为第 q q q 个目标超出 CP 的时延部分,单位为 s \text{s} s;
-
τ q \tau_q τq 为总往返时延;
-
T cp T_{\text{cp}} Tcp 为 CP 时长。
对应的"多余时延"距离导向向量为
b q ex ( n ) = e − j 2 π n Δ f τ q ex b_q^{\text{ex}}(n) = e^{-j 2\pi n \Delta f \tau_q^{\text{ex}}} bqex(n)=e−j2πnΔfτqex
式中:
-
b q ex ( n ) b_q^{\text{ex}}(n) bqex(n) 为与多余时延相关的相位因子;
-
n n n 为子载波索引;
-
Δ f \Delta f Δf 为子载波间隔;
-
τ q ex \tau_q^{\text{ex}} τqex 为多余时延。
3.3 符号间移位矩阵
令符号维度上的移位矩阵为
J 1 ∈ C M × M \mathbf{J}_1 \in \mathbb{C}^{M \times M} J1∈CM×M
其仅在上偏一条对角线 上为 1 1 1,其余元素为 0 0 0,用于表示"向后平移一符号"的操作,即
J 1 ( m , m + 1 ) = 1 , m = 0 , ... , M − 2 \mathbf{J}_1(m,m+1) = 1,\quad m = 0,\dots,M-2 J1(m,m+1)=1,m=0,...,M−2
式中:
-
J 1 ( m , m + 1 ) \mathbf{J}_1(m,m+1) J1(m,m+1) 为矩阵 J 1 \mathbf{J}_1 J1 的第 m m m 行、第 m + 1 m+1 m+1 列元素;
-
m m m 为符号索引;
-
M M M 为符号总数。
对某矩阵右乘 J 1 \mathbf{J}_1 J1 相当于其列索引整体向右平移一位,从而把"上一符号"的数据对齐到当前符号位置,实现 ISI 的建模。
3.4 总体频域模型:含 ISI/ICI
在考虑 CP 不足导致的 ISI 与 ICI 时,接收端的频域信号可建模为
Y = Y free + Y ISI − Y ICI + Z \mathbf{Y} = \mathbf{Y}{\text{free}} + \mathbf{Y}{\text{ISI}} - \mathbf{Y}_{\text{ICI}} + \mathbf{Z} Y=Yfree+YISI−YICI+Z
式中:
-
Y ∈ C N × M \mathbf{Y} \in \mathbb{C}^{N\times M} Y∈CN×M 为实际接收的频域信号矩阵;
-
Y free \mathbf{Y}_{\text{free}} Yfree 为无 ISI/ICI 时的理想回波矩阵;
-
Y ISI \mathbf{Y}_{\text{ISI}} YISI 为符号间干扰(ISI)分量矩阵;
-
Y ICI \mathbf{Y}_{\text{ICI}} YICI 为子载波间干扰(ICI)分量矩阵;
-
Z \mathbf{Z} Z 为加性复高斯白噪声矩阵。
1)ISI 分量
第 q q q 个目标的 ISI 基础分量可写为
A ISI ( q ) ( n , m ) = b q ex ( n ) c q ∗ ( m ) S ( n , m ) A^{(q)}_{\text{ISI}}(n,m) = b_q^{\text{ex}}(n) c_q^*(m) S(n,m) AISI(q)(n,m)=bqex(n)cq∗(m)S(n,m)
式中:
-
A ISI ( q ) ( n , m ) A^{(q)}_{\text{ISI}}(n,m) AISI(q)(n,m) 为在第 n n n 个子载波、第 m m m 个符号上的 ISI 基础项;
-
b q ex ( n ) b_q^{\text{ex}}(n) bqex(n) 为多余时延导向向量;
-
c q ∗ ( m ) c_q^*(m) cq∗(m) 为多普勒导向向量的共轭;
-
S ( n , m ) S(n,m) S(n,m) 为频域调制符号。
将 A ISI ( q ) A^{(q)}{\text{ISI}} AISI(q) 组成矩阵 A ISI ( q ) \mathbf{A}^{(q)}{\text{ISI}} AISI(q),其右乘移位矩阵 J 1 \mathbf{J}_1 J1,得到
A ISI,shift ( q ) = A ISI ( q ) J 1 \mathbf{A}^{(q)}{\text{ISI,shift}} = \mathbf{A}^{(q)}{\text{ISI}} \mathbf{J}_1 AISI,shift(q)=AISI(q)J1
式中:
-
A ISI ( q ) \mathbf{A}^{(q)}{\text{ISI}} AISI(q) 为由 A ISI ( q ) ( n , m ) A^{(q)}{\text{ISI}}(n,m) AISI(q)(n,m) 组成的矩阵;
-
A ISI,shift ( q ) \mathbf{A}^{(q)}_{\text{ISI,shift}} AISI,shift(q) 为将上一符号内容对齐到当前符号后的矩阵;
-
J 1 \mathbf{J}_1 J1 为移位矩阵。
接下来通过一个与延迟超出 CP 相关的矩阵 Φ q \boldsymbol{\Phi}_q Φq 将 ISI 引入子载波间耦合,最终,第 q q q 个目标的 ISI 分量为
Y ISI ( q ) = α q Φ q A ISI,shift ( q ) \mathbf{Y}^{(q)}_{\text{ISI}} = \alpha_q \boldsymbol{\Phi}q \mathbf{A}^{(q)}{\text{ISI,shift}} YISI(q)=αqΦqAISI,shift(q)
式中:
-
Y ISI ( q ) \mathbf{Y}^{(q)}_{\text{ISI}} YISI(q) 为第 q q q 个目标的 ISI 频域分量;
-
α q \alpha_q αq 为第 q q q 个目标的复反射系数;
-
Φ q ∈ C N × N \boldsymbol{\Phi}_q \in \mathbb{C}^{N\times N} Φq∈CN×N 为第 q q q 个目标对应的干扰耦合矩阵;
-
A ISI,shift ( q ) \mathbf{A}^{(q)}_{\text{ISI,shift}} AISI,shift(q) 为移位后的 ISI 基础矩阵。
多目标的 ISI 总分量为
Y ISI = ∑ q = 1 Q Y ISI ( q ) \mathbf{Y}{\text{ISI}} = \sum{q=1}^{Q} \mathbf{Y}^{(q)}_{\text{ISI}} YISI=q=1∑QYISI(q)
式中:
-
Y ISI \mathbf{Y}_{\text{ISI}} YISI 为所有目标引起的总 ISI;
-
Y ISI ( q ) \mathbf{Y}^{(q)}_{\text{ISI}} YISI(q) 为第 q q q 个目标的 ISI 分量;
-
Q Q Q 为目标数。
2)ICI 分量
第 q q q 个目标在"本符号内"的 ICI 基础分量为
A ICI ( q ) ( n , m ) = b q ( n ) c q ∗ ( m ) S ( n , m ) A^{(q)}_{\text{ICI}}(n,m) = b_q(n) c_q^*(m) S(n,m) AICI(q)(n,m)=bq(n)cq∗(m)S(n,m)
式中:
-
A ICI ( q ) ( n , m ) A^{(q)}_{\text{ICI}}(n,m) AICI(q)(n,m) 为 ICI 基础项;
-
b q ( n ) b_q(n) bq(n) 为距离导向向量;
-
c q ∗ ( m ) c_q^*(m) cq∗(m) 为多普勒导向向量的共轭;
-
S ( n , m ) S(n,m) S(n,m) 为调制符号。
组成矩阵 A ICI ( q ) \mathbf{A}^{(q)}_{\text{ICI}} AICI(q) 后,经 Φ q \boldsymbol{\Phi}_q Φq 作用,第 q q q 个目标的 ICI 分量为
Y ICI ( q ) = α q Φ q A ICI ( q ) \mathbf{Y}^{(q)}_{\text{ICI}} = \alpha_q \boldsymbol{\Phi}q \mathbf{A}^{(q)}{\text{ICI}} YICI(q)=αqΦqAICI(q)
式中:
-
Y ICI ( q ) \mathbf{Y}^{(q)}_{\text{ICI}} YICI(q) 为第 q q q 个目标的 ICI 分量;
-
α q \alpha_q αq、 Φ q \boldsymbol{\Phi}_q Φq 含义同上;
-
A ICI ( q ) \mathbf{A}^{(q)}{\text{ICI}} AICI(q) 为由 A ICI ( q ) ( n , m ) A^{(q)}{\text{ICI}}(n,m) AICI(q)(n,m) 组成的矩阵。
ICI 总分量为
Y ICI = ∑ q = 1 Q Y ICI ( q ) \mathbf{Y}{\text{ICI}} = \sum{q=1}^{Q} \mathbf{Y}^{(q)}_{\text{ICI}} YICI=q=1∑QYICI(q)
式中:
-
Y ICI \mathbf{Y}_{\text{ICI}} YICI 为所有目标引起的总 ICI;
-
Y ICI ( q ) \mathbf{Y}^{(q)}_{\text{ICI}} YICI(q) 为第 q q q 个目标的 ICI 分量;
-
Q Q Q 为目标数。
至此, Y \mathbf{Y} Y 的完整频域接收模型如前所示。
四、干扰矩阵 Φ q \boldsymbol{\Phi}_q Φq 的构造与性质
当 ℓ q ≤ N cp \ell_q \le N_{\text{cp}} ℓq≤Ncp 时,第 q q q 个目标完全落在 CP 内,不产生额外 ISI/ICI,此时
Φ q = 0 N × N \boldsymbol{\Phi}q = \mathbf{0}{N\times N} Φq=0N×N
式中:
-
Φ q \boldsymbol{\Phi}_q Φq 为第 q q q 个目标的干扰矩阵;
-
0 N × N \mathbf{0}_{N\times N} 0N×N 为 N × N N\times N N×N 零矩阵;
-
ℓ q \ell_q ℓq 为离散延迟;
-
N cp N_{\text{cp}} Ncp 为 CP 样本数。
当 ℓ q > N cp \ell_q > N_{\text{cp}} ℓq>Ncp 时,定义
K q = ℓ q − N cp K_q = \ell_q - N_{\text{cp}} Kq=ℓq−Ncp
式中:
-
K q K_q Kq 为超出 CP 的离散采样点数;
-
ℓ q \ell_q ℓq 为总离散延迟;
-
N cp N_{\text{cp}} Ncp 为 CP 样本数。
此时 Φ q \boldsymbol{\Phi}_q Φq 的元素 ϕ q ( n , n ′ ) \phi_q(n,n') ϕq(n,n′) 可写为
ϕ q ( n , n ′ ) = 1 N ∑ i = 0 K q − 1 e j 2 π ( n ′ − n ) i N \phi_q(n,n') = \frac{1}{N} \sum_{i=0}^{K_q-1} e^{j 2\pi (n' - n) \frac{i}{N}} ϕq(n,n′)=N1i=0∑Kq−1ej2π(n′−n)Ni
式中:
-
ϕ q ( n , n ′ ) \phi_q(n,n') ϕq(n,n′) 为矩阵 Φ q \boldsymbol{\Phi}_q Φq 的第 n n n 行、第 n ′ n' n′ 列元素;
-
n n n 为接收子载波索引;
-
n ′ n' n′ 为发送子载波索引;
-
K q K_q Kq 为超出 CP 的采样点数;
-
N N N 为子载波个数;
-
i i i 为时间采样索引。
令
Δ n = n ′ − n \Delta n = n' - n Δn=n′−n
式中:
-
Δ n \Delta n Δn 为子载波索引差,即频域"间隔";
-
n , n ′ n,n' n,n′ 含义同上。
当 Δ n = 0 \Delta n = 0 Δn=0 时,上式退化为
ϕ q ( n , n ) = K q N \phi_q(n,n) = \frac{K_q}{N} ϕq(n,n)=NKq
式中:
-
ϕ q ( n , n ) \phi_q(n,n) ϕq(n,n) 为干扰矩阵的对角元素;
-
K q K_q Kq 为超出 CP 的采样点数;
-
N N N 为子载波数。
当 Δ n ≠ 0 \Delta n \ne 0 Δn=0 时,上式为几何级数,可写为
ϕ q ( n , n ′ ) = 1 N 1 − r K q 1 − r \phi_q(n,n') = \frac{1}{N} \frac{1 - r^{K_q}}{1 - r} ϕq(n,n′)=N11−r1−rKq
其中
r = e j 2 π Δ n N r = e^{j 2\pi \frac{\Delta n}{N}} r=ej2πNΔn
式中:
-
r r r 为几何级数公比;
-
Δ n \Delta n Δn 为子载波索引差;
-
K q K_q Kq 为求和项数;
-
N N N 为子载波数。
由此可见, Φ q \boldsymbol{\Phi}_q Φq 描述了超出 CP 的那段时域片段在频域中如何造成子载波间耦合,进而产生 ISI/ICI。
五、距离--多普勒图(RDM)的构造
5.1 频域匹配滤波
在频域中,利用已知发射符号矩阵 S \mathbf{S} S,可对接收矩阵 Y \mathbf{Y} Y 进行匹配滤波:
Y ~ ( n , m ) = Y ( n , m ) S ∗ ( n , m ) \widetilde{Y}(n,m) = Y(n,m) S^*(n,m) Y (n,m)=Y(n,m)S∗(n,m)
式中:
-
Y ~ ( n , m ) \widetilde{Y}(n,m) Y (n,m) 为匹配滤波后的频域信号;
-
Y ( n , m ) Y(n,m) Y(n,m) 为接收频域信号;
-
S ∗ ( n , m ) S^*(n,m) S∗(n,m) 为发射符号的复共轭。
矩阵形式为
Y ~ = Y ⊙ S ∗ \widetilde{\mathbf{Y}} = \mathbf{Y} \odot \mathbf{S}^* Y =Y⊙S∗
式中:
-
Y ~ \widetilde{\mathbf{Y}} Y 为匹配滤波后的频域矩阵;
-
⊙ \odot ⊙ 为 Hadamard 乘积(元素逐点相乘);
-
S ∗ \mathbf{S}^* S∗ 为矩阵 S \mathbf{S} S 的逐元素共轭;
-
Y \mathbf{Y} Y 为接收矩阵。
5.2 距离向 IFFT
对每个符号 m m m,在子载波维度上进行 N N N 点逆 FFT,实现从频域到距离域的变换。一般形式为
χ ( r , m ) = ∑ n = 0 N − 1 Y ~ ( n , m ) e j 2 π n r N \chi(r,m) = \sum_{n=0}^{N-1} \widetilde{Y}(n,m) e^{j 2\pi \frac{n r}{N}} χ(r,m)=n=0∑N−1Y (n,m)ej2πNnr
式中:
-
χ ( r , m ) \chi(r,m) χ(r,m) 为第 r r r 个"距离单元"、第 m m m 个符号的匹配输出;
-
r r r 为距离单元索引, r = 0 , ... , N − 1 r=0,\dots,N-1 r=0,...,N−1;
-
n n n 为子载波索引;
-
Y ~ ( n , m ) \widetilde{Y}(n,m) Y (n,m) 为匹配滤波结果。
距离轴的物理刻度为
R r = r Δ R R_r = r \Delta R Rr=rΔR
式中:
-
R r R_r Rr 为第 r r r 个距离单元对应的实际距离,单位为 m \text{m} m;
-
r r r 为距离单元索引;
-
Δ R \Delta R ΔR 为距离分辨率。
5.3 多普勒向 FFT
在多普勒维度,对每个距离单元 r r r 的 M M M 个符号做 M M M 点 FFT,得到
χ ( r , k ) = ∑ m = 0 M − 1 χ ( r , m ) e − j 2 π m k M \chi(r,k) = \sum_{m=0}^{M-1} \chi(r,m) e^{-j 2\pi \frac{m k}{M}} χ(r,k)=m=0∑M−1χ(r,m)e−j2πMmk
式中:
-
χ ( r , k ) \chi(r,k) χ(r,k) 为第 r r r 个距离单元、第 k k k 个多普勒单元的匹配输出;
-
k k k 为多普勒频率索引,一般通过 FFT 加频移实现居中;
-
m m m 为符号索引;
-
χ ( r , m ) \chi(r,m) χ(r,m) 为距离向 IFFT 后结果。
多普勒频率与速度的对应关系为
f d , k = k M T s , v k = c 0 f d , k 2 f c f_{d,k} = \frac{k}{M T_s},\quad v_k = \frac{c_0 f_{d,k}}{2 f_c} fd,k=MTsk,vk=2fcc0fd,k
式中:
-
f d , k f_{d,k} fd,k 为第 k k k 个多普勒单元对应的频率,单位为 Hz \text{Hz} Hz;
-
v k v_k vk 为第 k k k 个多普勒单元对应的径向速度,单位为 m/s \text{m/s} m/s;
-
k k k 为多普勒索引;
-
M M M 为符号数;
-
T s T_s Ts 为符号周期;
-
c 0 c_0 c0 为光速;
-
f c f_c fc 为载波频率。
5.4 RDM 幅度谱与归一化
得到 χ ( r , k ) \chi(r,k) χ(r,k) 后,可构造 RDM 的幅度谱
RDM ( r , k ) = 20 log 10 ( ∣ χ ( r , k ) ∣ max r ′ , k ′ ∣ χ ( r ′ , k ′ ) ∣ + ε ) \text{RDM}(r,k) = 20 \log_{10} \left( \frac{\lvert \chi(r,k) \rvert} {\max_{r',k'} \lvert \chi(r',k') \rvert + \varepsilon} \right) RDM(r,k)=20log10(maxr′,k′∣χ(r′,k′)∣+ε∣χ(r,k)∣)
式中:
-
RDM ( r , k ) \text{RDM}(r,k) RDM(r,k) 为第 r r r 个距离单元、第 k k k 个多普勒单元的功率谱(单位为 dB \text{dB} dB);
-
∣ χ ( r , k ) ∣ \lvert \chi(r,k) \rvert ∣χ(r,k)∣ 为复数 χ ( r , k ) \chi(r,k) χ(r,k) 的幅度;
-
max r ′ , k ′ ∣ χ ( r ′ , k ′ ) ∣ \max_{r',k'} \lvert \chi(r',k') \rvert maxr′,k′∣χ(r′,k′)∣ 为所有距离--多普勒点上的最大幅度,用于归一化;
-
ε \varepsilon ε 为极小正数,防止对 0 0 0 取对数;
-
r , k r,k r,k 为距离和多普勒索引。
六、迭代式 SIC-DFT 算法
在仿真环境中, Y free \mathbf{Y}{\text{free}} Yfree、 Y ISI \mathbf{Y}{\text{ISI}} YISI、 Y ICI \mathbf{Y}_{\text{ICI}} YICI 均被显式构造,因此可以视为已知,用于研究理想"Oracle 级"迭代干扰抵消的性能上界。
6.1 频域干扰分量定义
由总体模型可定义总干扰分量为
Y intf = Y ISI − Y ICI \mathbf{Y}{\text{intf}} = \mathbf{Y}{\text{ISI}} - \mathbf{Y}_{\text{ICI}} Yintf=YISI−YICI
式中:
-
Y intf \mathbf{Y}_{\text{intf}} Yintf 为总干扰(ISI 与 ICI 组合)频域矩阵;
-
Y ISI \mathbf{Y}_{\text{ISI}} YISI 为 ISI 分量矩阵;
-
Y ICI \mathbf{Y}_{\text{ICI}} YICI 为 ICI 分量矩阵。
6.2 迭代 SIC 更新过程
令迭代次数上限为 L L L,初始化第 0 0 0 次迭代的信号为
Y ( 0 ) = Y \mathbf{Y}^{(0)} = \mathbf{Y} Y(0)=Y
式中:
-
Y ( 0 ) \mathbf{Y}^{(0)} Y(0) 为第 0 0 0 次迭代时的频域接收矩阵;
-
Y \mathbf{Y} Y 为原始接收矩阵。
在第 i i i 次迭代中( i = 1 , ... , L i=1,\dots,L i=1,...,L),做如下更新:
Y ( i ) = Y ( i − 1 ) − 1 L Y intf \mathbf{Y}^{(i)} = \mathbf{Y}^{(i-1)} - \frac{1}{L} \mathbf{Y}_{\text{intf}} Y(i)=Y(i−1)−L1Yintf
式中:
-
Y ( i ) \mathbf{Y}^{(i)} Y(i) 为第 i i i 次迭代后的频域信号;
-
Y ( i − 1 ) \mathbf{Y}^{(i-1)} Y(i−1) 为第 i − 1 i-1 i−1 次迭代的频域信号;
-
Y intf \mathbf{Y}_{\text{intf}} Yintf 为总干扰矩阵;
-
L L L 为总迭代次数。
形式上,在完成 L L L 次迭代后,有
Y ( L ) = Y − Y intf = Y free + Z \mathbf{Y}^{(L)} = \mathbf{Y} - \mathbf{Y}{\text{intf}} = \mathbf{Y}{\text{free}} + \mathbf{Z} Y(L)=Y−Yintf=Yfree+Z
式中:
-
Y ( L ) \mathbf{Y}^{(L)} Y(L) 为第 L L L 次迭代后的频域信号;
-
Y \mathbf{Y} Y 为真实接收信号;
-
Y intf \mathbf{Y}_{\text{intf}} Yintf 为总干扰;
-
Y free \mathbf{Y}_{\text{free}} Yfree 为无 ISI/ICI 的理想回波;
-
Z \mathbf{Z} Z 为噪声矩阵。
在实际系统中, Y ISI \mathbf{Y}{\text{ISI}} YISI、 Y ICI \mathbf{Y}{\text{ICI}} YICI 通常未知,需要通过估计目标参数并重构干扰项来实现真正的 SIC;此处的迭代模型主要用于分析"若干扰能被完美估计"时,超越 CP 限制仍能恢复高质量 RDM 的潜力。
6.3 与简单 DFT 基线的对比
-
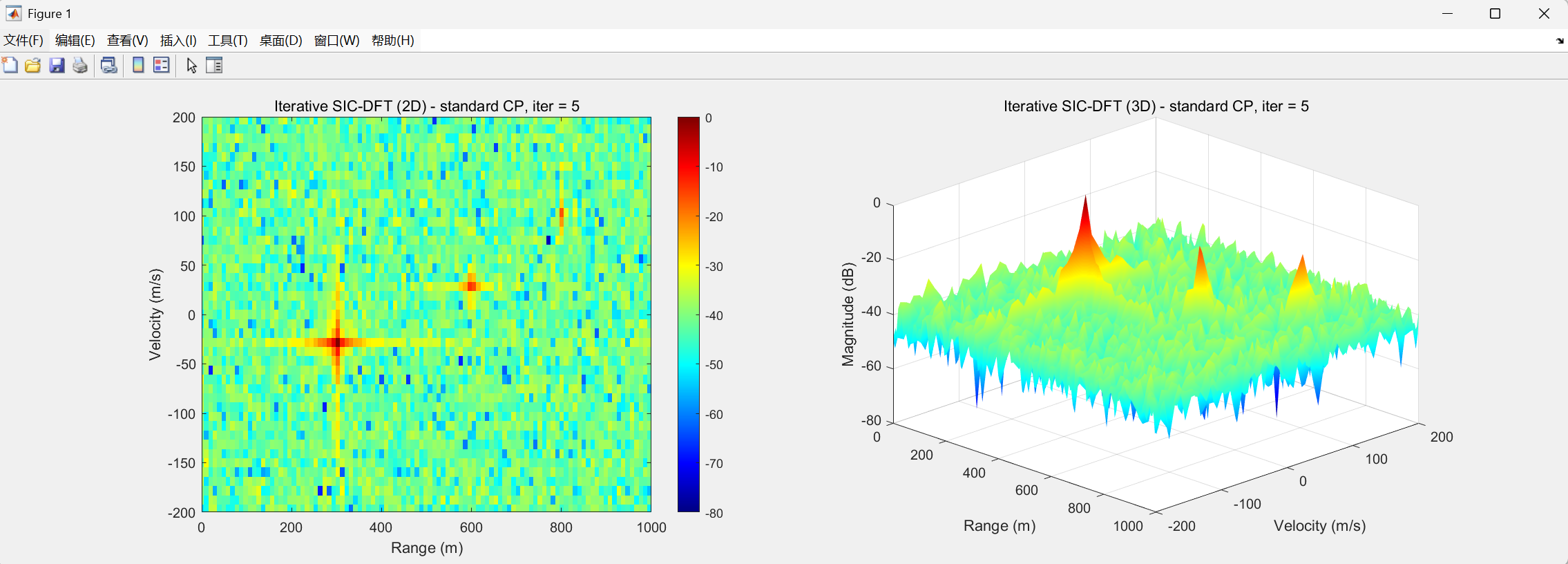
基线方案(无 SIC) :直接利用 Y \mathbf{Y} Y 构造 RDM,即在构造匹配滤波与二维 FFT 时,包含所有 ISI/ICI。此时 RDM 中的目标峰将受到明显的旁瓣上升与伪峰污染。
-
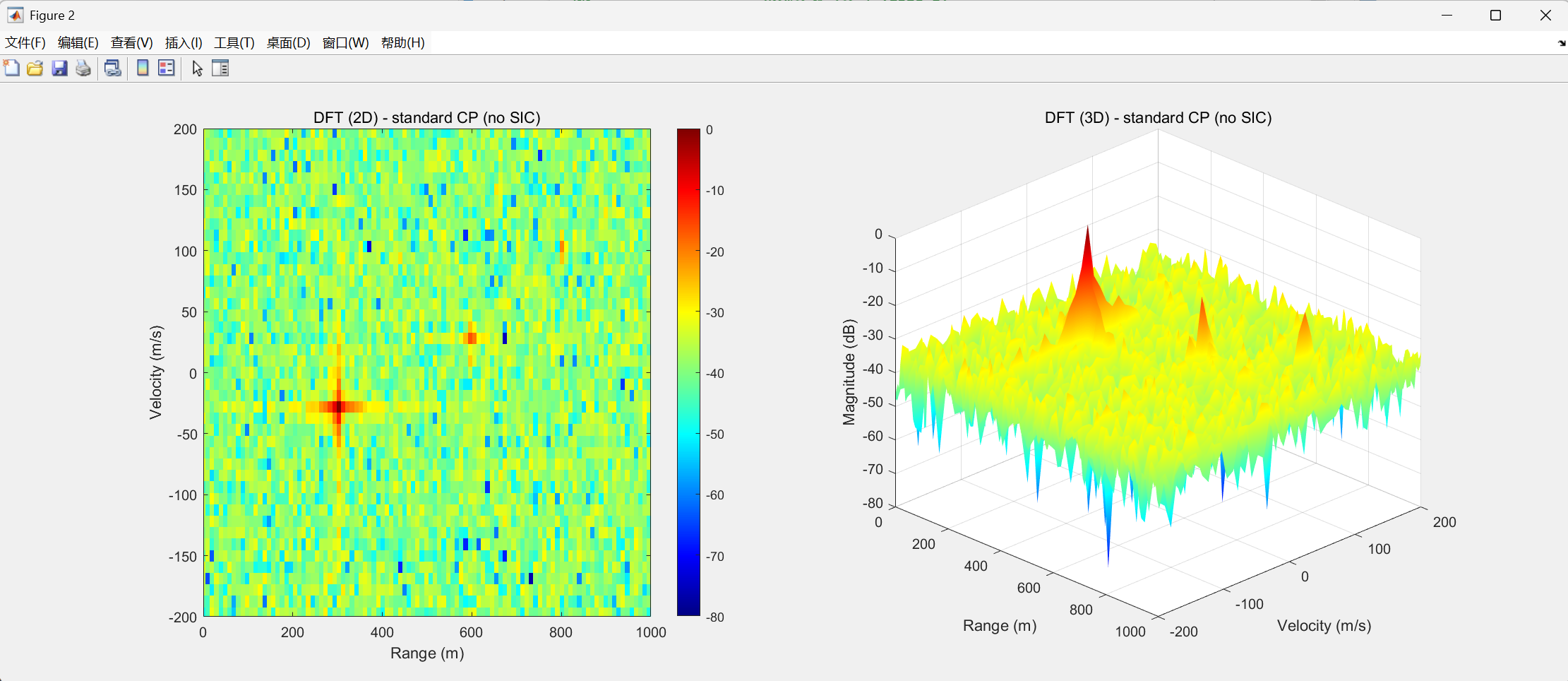
迭代 SIC-DFT 方案 :对每次迭代后的 Y ( i ) \mathbf{Y}^{(i)} Y(i) 构造 RDM,可以观察到随着 i i i 增大,RDM 中主峰逐渐变得尖锐、旁瓣降低,远距离目标在短 CP 条件下仍然可以被清晰分辨。
总结
本文围绕"OFDM-ISAC 超越 CP 限制"这一主题,从公式与原理角度对仿真模型所隐含的数学机制进行了系统梳理,主要包括:
-
从 OFDM 基本参数出发,推导了距离分辨率、速度分辨率、CP 限制下的最大无 ISI 距离等关键指标,明确了RDM 轴范围 与CP 物理约束之间的差异。
-
在 CP 足够的前提下,给出了多目标场景下的频域回波模型,并用导向向量 b q ( n ) b_q(n) bq(n)、 c q ( m ) c_q(m) cq(m) 统一描述时延与多普勒效应。
-
在 CP 不足时,构建了包含 ISI 与 ICI 的完整频域模型,通过干扰矩阵 Φ q \boldsymbol{\Phi}_q Φq 精确刻画了"超出 CP 的时域片段"在频域中的能量泄漏与子载波耦合。
-
基于频域匹配滤波和二维 FFT,给出了 RDM 的构造方法及其距离--速度轴的物理映射。
-
引入迭代 SIC-DFT 算法,对频域干扰进行多轮抵消,理论上可逐步逼近无 ISI/ICI 的理想回波 Y free \mathbf{Y}_{\text{free}} Yfree,显著提升在短 CP 条件下的远距离感知性能。
从工程角度看,当标准通信 CP 显著短于雷达设计所需 CP 时,直接延长 CP 会明显降低频谱效率。本文分析的"超越 CP 限制 + 迭代式频域 SIC"思路,为在复用现有通信波形的前提下扩展雷达感知距离、提升感知性能提供了重要的理论基础与算法范式。