整体如下:
一、先熟悉界面:3 个核心区域
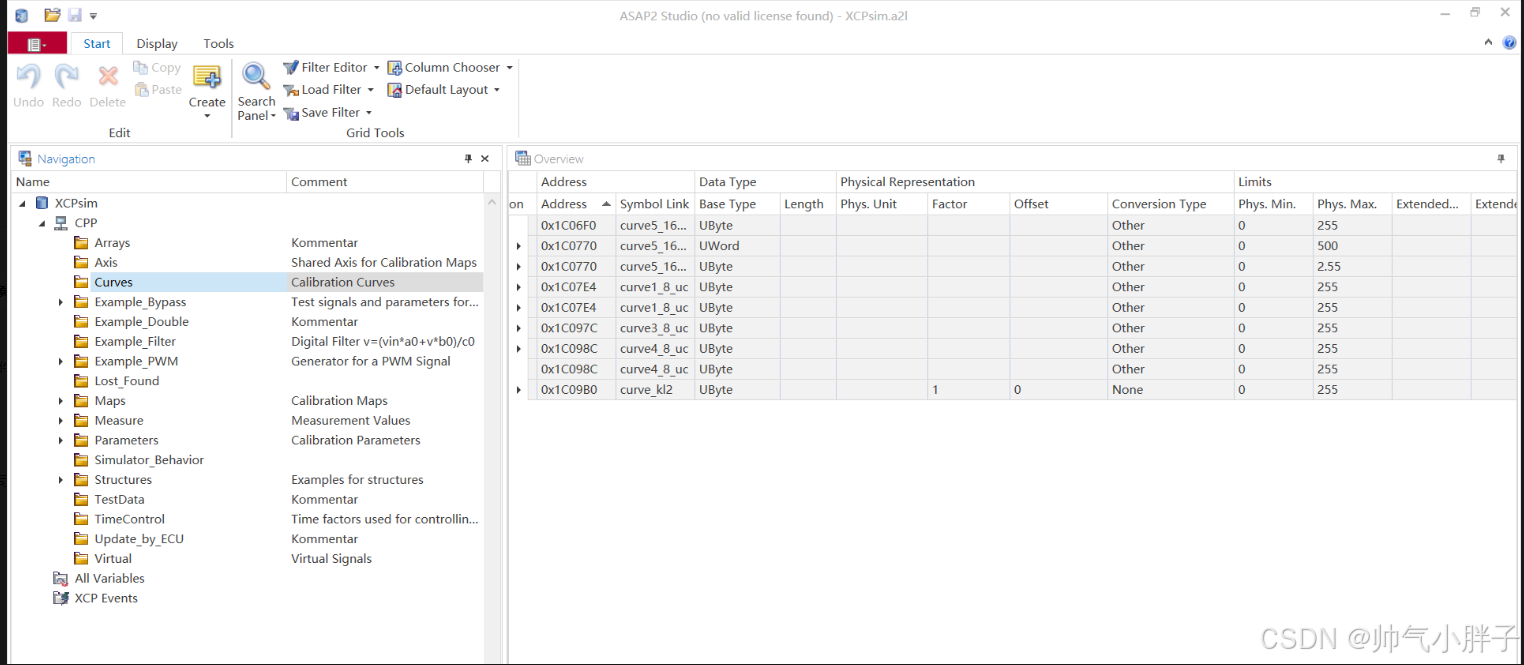
打开 ASAP2 Studio 并加载 A2L 文件后,界面分为 3 部分:
- 顶部工具栏:包含 "撤销 / 重做""复制 / 粘贴""创建新元素" 等常用按钮;
- 左侧 Navigation(导航栏) :按 A2L 文件的逻辑分类(如
Curves曲线、Parameters参数、Maps地图)管理所有变量,点击分类可展开子项; - 右侧 Overview(概览表格) :显示当前选中分类下所有变量的详细属性(地址、数据类型、物理转换规则等)。
二、核心操作 1:加载 / 新建 A2L 文件
加载已有 A2L 文件
- 点击顶部
File→Open,选择本地的.a2l文件(比如XCPsim.a2l),即可加载到界面中。
新建 A2L 文件
- 点击
File→New,选择ASAP2 Database,输入文件名(如MyECU.a2l),即可创建空白 A2L 文件。
三、核心操作 2:查看变量的 "完整信息"
以左侧导航栏的Curves(曲线类变量)为例:
- 点击左侧
Curves分类,右侧表格会显示所有曲线变量; - 右侧表格列的含义(新手必看):
Address:变量在 ECU 中的内存地址 (如0x1C06F0,CANape 靠这个地址访问 ECU 变量);Symbol:变量名称(如curve5_16...);Data Type:变量的数据类型(如UByte= 无符号字节,UWord= 无符号双字节);Factor/Offset:物理值转换公式(物理值 = 原始值 × Factor + Offset,比如 Factor=1、Offset=0 时,原始值 "50" 对应物理值 "50");Limits(Phys.Min/Max):变量的物理值范围(比如0~255,超出范围的标定值会被 ECU 拒绝)。
四、核心操作 3:修改已有变量的参数
比如要修改curve_k12的 "物理值转换规则":
- 左侧选中
Curves,右侧找到curve_k12这一行; - 双击
Factor列对应的单元格,输入新数值(比如从 "1" 改为 "0.1"); - 双击
Offset列对应的单元格,输入新数值(比如从 "0" 改为 "20"); - 修改后,该变量的物理值公式变为:
物理值 = 原始值 × 0.1 + 20(比如原始值 "50",物理值会显示为 "25"); - 点击顶部
File→Save(或Ctrl+S)保存修改。
五、核心操作 4:新增一个 "参数变量(Parameters)"
以新增一个 "发动机转速参数" 为例:
- 左侧导航栏找到
Parameters分类,点击选中; - 顶部工具栏点击
Create(黄色加号图标) → 选择Characteristic(参数 / 曲线的通用类型); - 在弹出的窗口中填写:
Name:变量名称(比如Engine_Speed);Address:ECU 中分配的内存地址(比如0x1C0A00,需与 ECU 编译后的地址一致);Data Type:选择UWord(无符号双字节,可存 0~65535 的数值);Factor:填 "0.1"(原始值转物理值的系数);Offset:填 "0";Phys.Min/Max:填 "0" 和 "8000"(转速范围 0~8000rpm);
- 点击
OK,新变量会出现在右侧表格中; - 保存文件(
Ctrl+S)。
六、核心操作 5:校验 A2L 文件(避免错误)
修改 / 新增变量后,必须校验语法是否正确:
- 点击顶部
Tools→Validate; - 若弹出 "Validation successful" 提示,说明文件无错误;
- 若提示错误(比如地址格式不对),根据提示修改对应内容即可。
七、新手避坑:2 个关键注意事项
- 地址必须与 ECU 一致 :A2L 中变量的
Address必须和 ECU 编译后的 MAP 文件地址匹配,否则 CANape 无法访问该变量; - 物理转换规则要对应 ECU 逻辑 :
Factor/Offset的数值要和 ECU 内部的计算逻辑一致(比如 ECU 中转速的原始值是 "500" 对应 "5000rpm",则 Factor 要填 "10")。
按以上步骤,你可以快速完成 A2L 文件的 "查看、修改、新增" 核心操作,后续熟悉后可尝试更复杂的配置(比如Maps地图类变量)。
八、导航区的变量种类
以下是图中各类变量在新能源汽车智能驾驶标定场景中的典型应用实例,结合实际功能说明分类的作用:
1. Arrays(数组)
- 作用:存储同类型的批量数据
- 智能驾驶场景实例:激光雷达的 "点云原始数据数组"------ 将激光雷达采集的 32 线 / 64 线点云数据(每个点包含距离、角度、反射率)以数组形式存储,方便 CANape 读取后用于感知算法的标定验证。
2. Axis(坐标轴)
- 作用 :定义
Curves/Maps的自变量范围(支持多变量共用) - 智能驾驶场景实例 :定义 "车速轴"------ 设置车速范围为
0~120km/h、步长为5km/h,该轴可被 "车速→跟车距离曲线""车速→转向灵敏度曲线" 等多个Curves共用,避免重复配置。
3. Curves(一维曲线)
- 作用:描述 "单一输入→输出" 的映射关系
- 智能驾驶场景实例 :
- 车速→跟车安全距离曲线:车速(自变量)对应自适应巡航(ACC)的跟车距离(输出),比如车速 30km/h 对应跟车距离 5m,车速 100km/h 对应跟车距离 20m。
- 方向盘转角→转向电机扭矩曲线:方向盘转角(输入)对应转向电机的输出扭矩(输出),用于标定转向手感的线性度。
4. Example_XXX(示例模块)
- 作用:提供典型场景的配置模板
- 智能驾驶场景实例 :
Example_Filter(数字滤波示例)------ 可直接复用该模板,配置毫米波雷达信号的滤波参数(比如滤波系数、滞后阈值),快速实现雷达信号的降噪标定。
5. Maps(二维 / 三维地图)
- 作用:描述 "多输入→输出" 的复杂映射
- 智能驾驶场景实例 :
- 车速 + 车距→ACC 加减速 Map:以 "车速(X 轴)""与前车的距离(Y 轴)" 为输入,输出 ACC 的加 / 减速度(表格值),比如车速 60km/h + 车距 10m 时,输出减速 - 2m/s²;车速 80km/h + 车距 30m 时,输出加速 1m/s²。
- 坡度 + 电池 SOC→能量回收强度 Map:以 "道路坡度(X 轴)""电池 SOC(Y 轴)" 为输入,输出制动能量回收的强度(表格值),实现不同工况下的能耗优化。
6. Measure(测量变量)
- 作用:存储仅读取的实时数据
- 智能驾驶场景实例 :
- 摄像头的 "实时帧率""曝光值";
- 毫米波雷达的 "目标识别数量""目标距离";这些变量仅用于监控,不可标定,方便工程师实时查看传感器状态。
7. Parameters(参数)
- 作用:存储固定配置值
- 智能驾驶场景实例 :
- 自动泊车的 "最小车位宽度阈值"(比如 2.5m,小于该值不启动泊车);
- 车道保持辅助(LKA)的 "介入灵敏度等级"(比如等级 3 对应较激进的车道纠偏);这些参数是功能的基础配置,标定后通常固定不变。
8. Structures(结构体)
- 作用:存储多字段的复合数据
- 智能驾驶场景实例 :"智能驾驶状态结构体"------ 包含字段:
当前模式(ACC/LKA/自动泊车)、激活状态(开/关)、故障码,将多维度的状态信息封装为一个结构体,便于统一管理和读取。
9. Virtual(虚拟变量)
- 作用:存储 CANape 计算生成的衍生数据
- 智能驾驶场景实例 :"平均能耗"------ 通过
总电耗/总里程计算得到(非 ECU 实际存储),用于直观展示智能驾驶模式下的能耗表现,辅助能耗优化标定。
这些分类覆盖了智能驾驶标定中 "传感器数据采集、控制逻辑映射、功能参数配置" 等核心场景,通过分类管理可高效实现复杂功能的标定与调试。