摘要 :GPU从专用图形渲染硬件演进为通用并行计算平台后,传统图形管线因结构限制无法充分释放其计算潜能,Compute Shader(计算着色器)由此应运而生。作为主流图形API(如OpenGL、Vulkan等)的内置组件,Compute Shader打破了渲染管线的束缚,以"线程-工作组-线程网格"的灵活并行模型,直接调度GPU的通用计算资源,支持对缓冲区、纹理等内存资源的自由读写。
本文从技术背景出发,系统阐述了Compute Shader的核心特性、线程模型、内存访问机制及同步逻辑,并结合NVIDIA GPU"芯片-GPC-SM"的硬件架构,揭示了其与Compute Shader编程模型的深度绑定关系。通过对比Compute Shader与传统渲染管线、CUDA、OpenCL的差异,明确了其"图形协同能力强、零额外依赖、开发门槛适中"的核心优势。最后以3x3高斯模糊为实践案例,直观展现了Compute Shader与Graphics Shader在实现逻辑、资源调度上的区别,总结出其在渲染流程并行计算(如粒子模拟、后处理)与轻量级通用计算场景中的适用价值,为开发者提供技术选型与实践参考。
关键字:Compute Shader;GPU通用计算;并行计算;线程模型;内存访问;图形API;高斯模糊;CUDA;OpenCL;渲染管线
1 简介
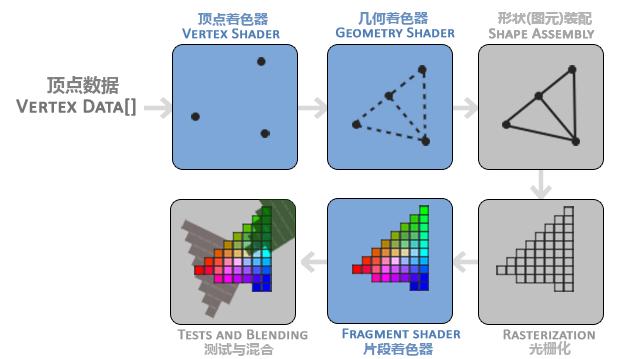
GPU最初是为高效图形渲染而设计的专用硬件。传统GPU的核心架构紧密围绕图形渲染流程构建,其工作依赖于固定的渲染管线:例如,顶点着色器负责处理三维顶点坐标,片段着色器则用于计算每个像素的最终颜色。整个渲染过程被严格限定在这一预设的管线结构中。
然而,随着计算机科学的发展,人们逐渐认识到大规模并行计算在加速计算密集型任务中的巨大潜力。SIMD(单指令多数据)等并行计算模型的兴起,显著提升了处理效率并降低了成本,也促使GPU逐步从单纯的图形处理器演变为通用并行计算平台。特别是在人工智能迅猛发展的推动下,GPU的通用计算能力愈发受到重视。以目前常见的RTX 3060显卡为例,其搭载了多达3584个CUDA核心,具备强大的并行计算能力。
但问题在于,传统的图形渲染管线无法充分利用这些计算资源------在渲染过程中,仅有部分核心被有效调用,大量计算单元处于闲置状态。为了在图形渲染场景中更充分地发挥GPU的硬件潜能,Compute Shader(计算着色器)应运而生。它打破了传统渲染管线的限制,允许开发者直接调度GPU的通用计算能力,从而实现更灵活、高效的图形与非图形任务处理。
如今,Compute Shader 已被广泛集成到主流图形 API 体系中,包括 Metal、OpenGL、Vulkan 和 DirectX。它突破了传统渲染管线的限制,充分释放了 GPU 的并行计算能力,使得在渲染场景中处理计算密集型任务的性能显著提升。例如:
- 粒子系统模拟:利用 Compute Shader 可在 GPU 上高效更新大量粒子的位置、速度和生命周期,避免频繁的 CPU-GPU 数据传输;
- 屏幕空间环境光遮蔽(SSAO)或光线追踪降噪:通过并行计算加速复杂的光照与遮蔽效果处理;
- 网格细分与程序化生成 :动态生成或细化几何数据,如地形、植被或破坏效果;
物理模拟:如布料、流体或刚体动力学,可在 GPU 上并行求解,大幅提升实时性; - 后处理特效:如景深、运动模糊、色调映射等,借助 Compute Shader 实现更灵活高效的图像处理流程。
这些应用不仅提升了渲染效率,也拓展了图形管线的表达能力,使开发者能更自由地结合图形与通用计算,打造高性能、高画质的实时渲染体验。
2 Compute Shader
2.1 Compute Shader简介
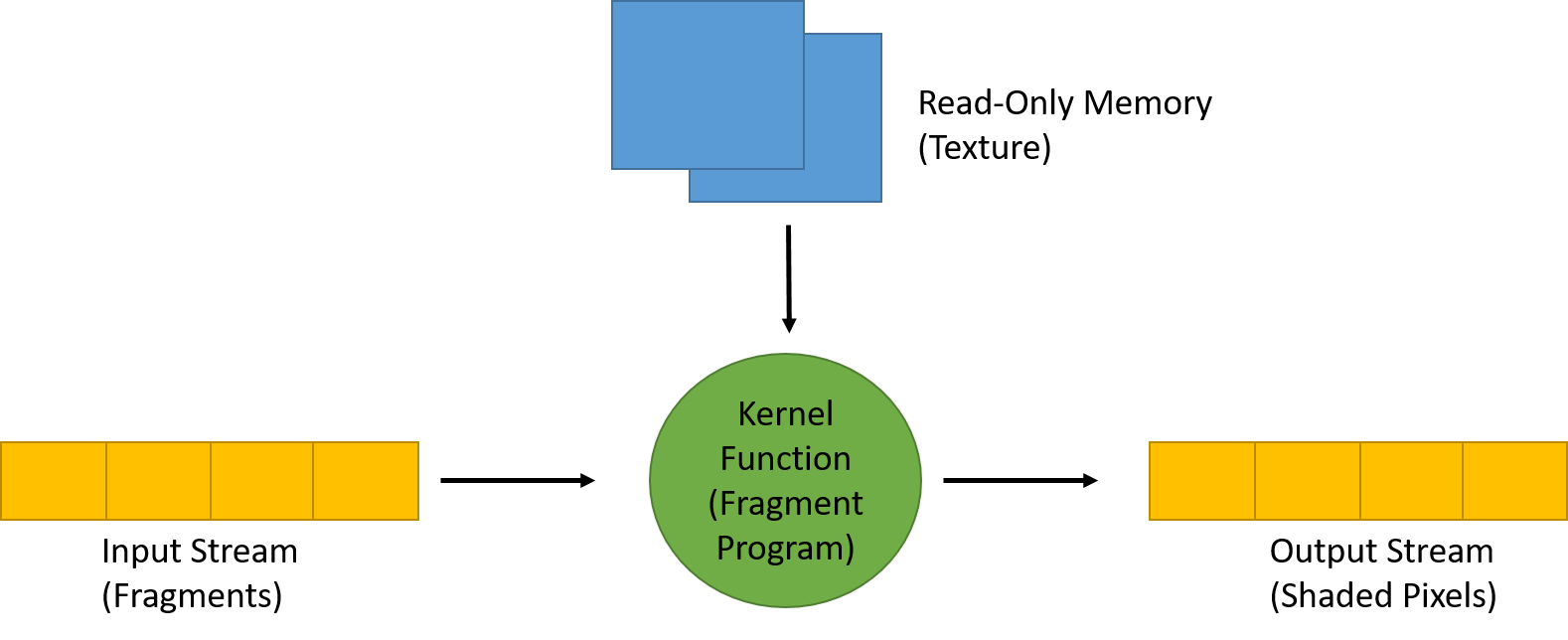
Compute Shader(计算着色器)是一种运行在 GPU 上的可编程着色器,专注于通用并行计算任务,而非传统图形渲染管线中的特定阶段(如顶点变换、像素着色)。它不依赖于固定的图形输入(如顶点、纹理坐标),也不强制输出图形数据(如像素颜色),而是通过直接操作 GPU 内存资源(缓冲区、纹理等),实现任意并行计算逻辑。Compute Shader的核心特征为:
- 通用计算能力:支持整数运算、浮点运算、逻辑运算等通用计算操作,可处理非图形类任务(如数据排序、矩阵乘法、物理模拟)。
- 直接资源访问:可读写 GPU 全局内存、共享内存、纹理内存等多种存储资源,灵活控制数据流转。
- 完全并行调度:由 GPU 驱动程序自动调度大量线程并行执行,无需开发者手动管理线程生命周期。
- 与图形管线协同:不依赖于图形管线的同时可与传统渲染管线(顶点着色器、片段着色器等)协同工作,例如用 Compute Shader 预处理渲染数据,再传递给后续渲染阶段。
2.2 Compute Shader:线程模型
Compute Shader 的执行基于一种高度结构化的多级线程组织方式,不同图形 API(如 Vulkan、DirectX、Metal)在术语上略有差异,但核心思想一致:
- 线程(Thread):最小执行单元,对应一个 GPU 核心,每个线程执行相同的 Compute Shader 代码,但处理不同的数据(通过线程 ID 区分)。
- 工作组(Work Group):多个线程的集合(通常为 64/128/256 个线程),同一工作组的线程可共享共享内存,并通过同步指令协同工作。通常映射到同一个 SM或者CU上。
- 线程网格(Grid):多个工作组的集合,对应整个 Compute Shader 任务的并行规模,总线程数 = 工作组数量 × 每组线程数。
例如,若要处理 1024x1024 分辨率的图像(共 1,048,576 个像素),可配置线程网格为 (1024/16, 1024/16, 1)(即 64x64 个工作组),每个工作组为 (16,16,1) 个线程(共 256 个线程),总线程数恰好覆盖所有像素。

2.3 Compute Shader:内存访问
GPU内存为了更高的内存带宽其设计理念和CPU的多级内存缓存机制类似,不同内存类型的访问速度差异极大,合理的内存访问模式是 Compute Shader 性能优化的核心:
- 全局内存:适合存储大规模共享数据,所有线程均可读写,但访问延迟高。
- 优化技巧:采用内存对齐访问(线程束内线程访问连续内存地址),利用 GPU 内存合并优化,减少访问次数。
- 共享内存:适合工作组内线程间数据交换,访问速度快。
- 优化技巧:将频繁访问的数据从全局内存加载到共享内存,减少全局内存访问次数;避免共享内存 bank 冲突(同一周期多个线程访问同一 bank)。
- 寄存器:线程私有,访问最快。
- 优化技巧:合理分配寄存器使用,避免寄存器溢出(溢出数据会被存储到全局内存,性能大幅下降)。
2.4 Compute Shader:同步机制
由于 GPU 线程执行速度存在差异,当多个线程依赖彼此的计算结果时,需要同步机制避免数据竞争。Compute Shader 中核心同步指令是 屏障(Barrier):
- 工作组内屏障(Group Memory Barrier):确保工作组内所有线程都执行到屏障位置后,再继续执行后续指令。例如,线程 A 写入共享内存数据,线程 B 读取该数据,需在 A 写入后、B 读取前插入屏障。
- 内存屏障(Memory Barrier):确保内存操作的可见性,即线程写入的内存数据对其他线程可见。
注意:不能跨 Work Group 同步!全局同步需通过多 dispatch 实现。
3 硬件基础
Compute Shader的高效性源于GPU独特的硬件架构,理解底层硬件设计是掌握 Compute Shader的关键。这一小节简单描述下现代GPU的硬件结构,不会特别深入,如果需要了解可参考对应硬件手册。下面以Nvidia的显卡架构为例描述。
3.1 GPU硬件结构
NVIDIA GPU 采用 "芯片 - 集群 - 核心" 三级模块化架构,所有组件围绕 "并行计算吞吐量" 设计,直接决定了 Compute Shader 的执行能力:
- 核心芯片(GPU Die):整颗 GPU 的物理载体,采用先进制程工艺(如 Blackwell 架构的 4NP、Ada 架构的 4N),集成数百亿甚至数千亿晶体管(如 Blackwell B200 单 Die 1040 亿晶体管)。芯片内部包含多个计算集群(GPC)、内存控制器、互联总线等核心模块,是 Compute Shader 任务的 "硬件载体"。
- 计算集群(GPC,Graphics Processing Cluster):GPU 内部的一级模块化单元,每个 GPC 包含多个流式多处理器(SM)、几何处理单元(GP)、光栅化引擎(Rasterizer),并通过高速互联通道连接到全局内存控制器。例如 Ada 架构 RTX 4090 包含 12 个 GPC,每个 GPC 可独立调度 Compute Shader 任务,实现多任务并行处理。
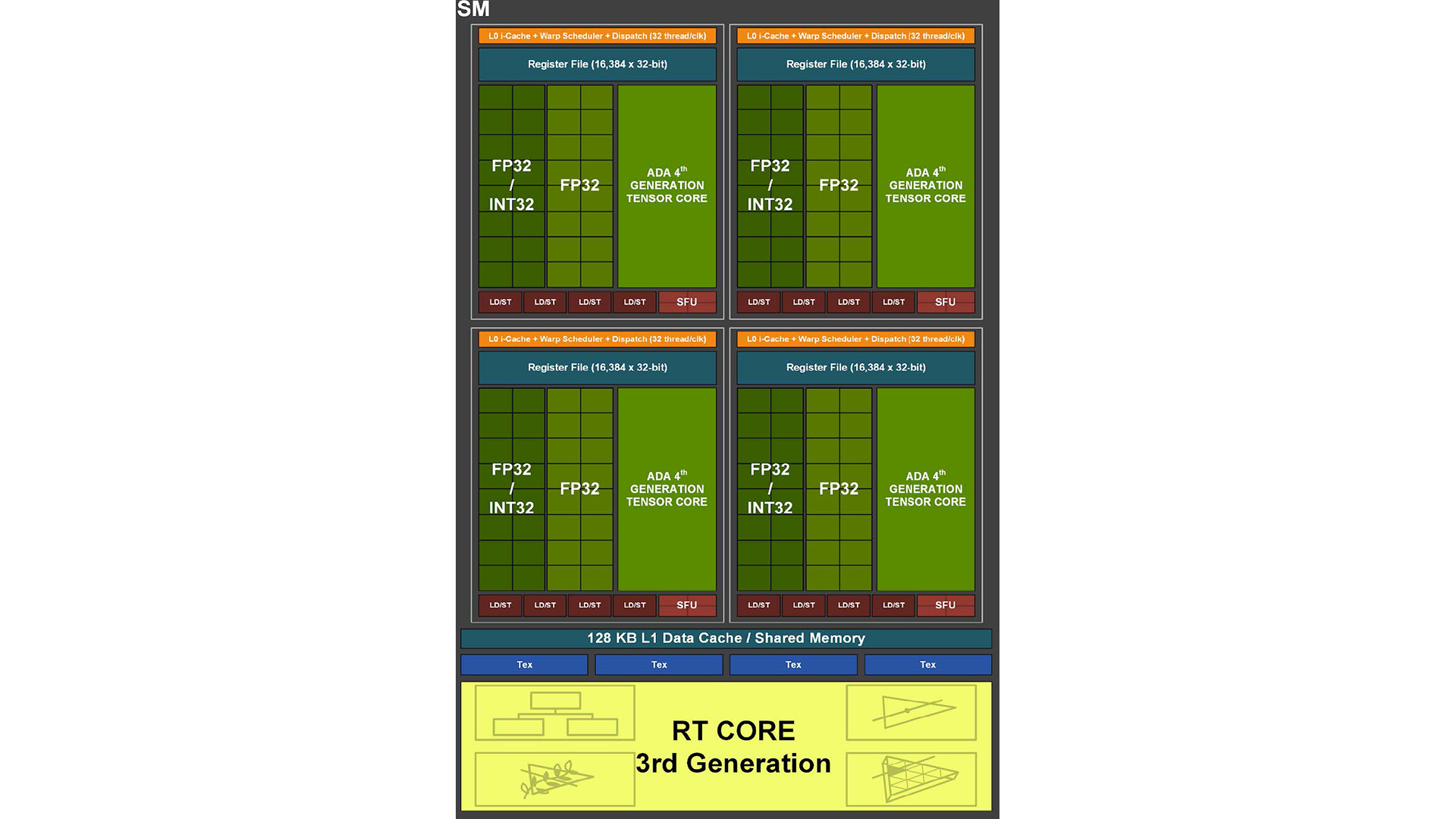
- 流式多处理器(SM,Stream Multiprocessor) :GPU 并行计算的核心单元,也是 Compute Shader 线程的直接执行载体。每个 SM 是一个独立的 "并行计算引擎",包含以下关键组件(以 Ada 架构为例):
- CUDA 核心:通用计算的 "原子单元",每个 SM 包含 128 个 CUDA 核心,负责执行 Compute Shader 中的整数运算、浮点运算(FP32/FP64)等通用计算指令。CUDA 核心采用 SIMT 架构,每个核心对应一个线程,可并行执行相同指令流。
- 专用加速核心:包括第三代 RT Core(光线追踪核心)和第四代 Tensor Core(张量核心),虽主要针对光线追踪和 AI 任务,但可通过 Compute Shader 间接调用(如利用 Tensor Core 加速矩阵乘法,提升 AI 推理类 Compute Shader 效率)。
- 共享内存(Shared Memory):每个 SM 配备 1024KB 可配置共享内存(可在 512KB 共享内存 + 512KB L1 缓存模式间切换),是工作组内线程共享数据的核心载体,直接影响 Compute Shader 的线程协同效率。
- 寄存器文件(Register File):每个 SM 包含海量寄存器(如 Ada 架构每个 SM 配备 256KB 寄存器文件),为线程提供私有存储,用于存放 Compute Shader 中的局部变量,访问延迟仅 1 个时钟周期。
- 纹理单元(Texture Unit):每个 SM 包含 16 个纹理单元,负责处理 Compute Shader 中的纹理采样操作,支持硬件滤波、纹理格式转换,优化图像类 Compute Shader 的数据读取效率。
- 内存系统:GPU 与外部数据交互的核心,包含全局内存(GDDR6X/HBM3E 显存)、L2 缓存、SM 私有 L1 缓存,形成 "寄存器→共享内存→L1 缓存→L2 缓存→全局内存" 的多级内存层次,直接决定 Compute Shader 的内存访问性能。
总的来说,NVIDIA GPU 采用"芯片→GPC→SM"的三级并行架构,将数百亿晶体管组织成由多个计算集群和大量 SM 构成的并行处理网络,每个 SM 内的 CUDA 核心、Tensor/RT 加速单元、可配置共享内存、寄存器文件与多级缓存共同组成高吞吐 SIMT 执行体系,使 Compute Shader 能以海量线程并发、协同存储访问和硬件加速单元支撑下高效运行。
3.2 硬件和Compute Shader的关联
NVIDIA GPU 的硬件设计与 Compute Shader 的编程模型、执行逻辑深度绑定,以下是关键关联点的详细解析:
SM 与 Compute Shader 线程调度:Compute Shader 的线程层次(线程→工作组→线程网格)直接映射到 SM 的硬件调度逻辑:
- 线程与 CUDA 核心的映射:Compute Shader 中的每个线程对应一个 CUDA 核心,线程执行的指令(如变量运算、内存访问)由 CUDA 核心直接执行。例如一个包含 256 个线程的工作组,会被调度到一个 SM 上(Ada 架构 SM 支持最大 1024 个线程并发),由 128 个 CUDA 核心分两轮并行执行(每轮 128 个线程)。
- 工作组与 SM 的绑定:一个工作组的所有线程必须在同一个 SM 上执行,这是因为工作组内线程需要通过共享内存交换数据 ------ 共享内存是 SM 私有的,跨 SM 无法直接访问。因此,Compute Shader 的工作组大小配置(如 16x16、32x8)必须适配 SM 的硬件限制(如最大线程数、共享内存容量),否则会导致调度失败或性能下降。
- 线程束(Warp)的硬件实现:NVIDIA GPU 将 32 个线程打包为一个线程束(Warp),这是 SM 调度的最小单位。Compute Shader 中的线程会自动按线程 ID 分组为线程束,同一线程束的线程执行相同指令流(SIMT)。例如,当 Compute Shader 包含 if-else 分支时,若同一线程束内部分线程走分支 A、部分走分支 B,会导致线程束序列化执行(先执行所有分支 A 线程,再执行所有分支 B 线程),这也是 "避免线程发散" 优化的硬件根源。
内存层次与 Compute Shader 数据访问:Compute Shader 的内存访问性能完全依赖 GPU 多级内存的硬件特性,不同内存类型的硬件设计直接决定了访问策略:
- 寄存器:硬件层面是线程私有存储,Compute Shader 中未被编译器优化的局部变量(如循环计数器、临时运算结果)会存储在寄存器中。由于寄存器访问速度最快(1 时钟周期),开发者应尽量减少局部变量的内存占用,避免寄存器溢出(溢出数据会被写入全局内存,访问延迟飙升至数百时钟周期)。
- 共享内存:硬件层面是 SM 内所有线程共享的高速缓存,带宽高达 TB/s 级别(Ada 架构 SM 共享内存带宽约 1.5TB/s)。Compute Shader 中,同一工作组的线程可通过共享内存交换数据(如粒子碰撞检测中的位置共享),但需注意硬件层面的 "bank 冲突"------ 共享内存被划分为 32 个 bank(与线程束大小一致),若同一周期内多个线程访问同一 bank 的不同地址,会导致访问序列化。因此,Compute Shader 中需通过数据填充、地址偏移等方式避免 bank 冲突,这是基于硬件设计的关键优化点。
- 全局内存:硬件层面是 GPU 所有 SM 共享的显存(如 GDDR6X/HBM3E),容量大(GB 级)但访问延迟高(数百时钟周期)。Compute Shader 中,全局内存用于存储大规模输入 / 输出数据(如粒子位置缓冲区、图像纹理)。硬件层面支持 "内存合并访问" 优化:若线程束内的 32 个线程访问连续的 32 字节对齐内存地址,GPU 会将其合并为一次内存事务,大幅提升带宽利用率。因此,Compute Shader 中应尽量按线程 ID 顺序访问全局内存(如 bufferdispatchID.x),契合硬件合并访问特性。
- 纹理内存:硬件层面针对 2D/3D 数据优化,包含专用缓存和滤波电路。Compute Shader 中处理图像类数据(如滤镜、超分)时,使用纹理内存而非全局内存,可利用硬件滤波(如双线性插值)和缓存加速,减少手动计算量并提升访问效率。
4 Compute Shader和其他API区别
4.1 Compute Shader 与传统渲染管线的区别
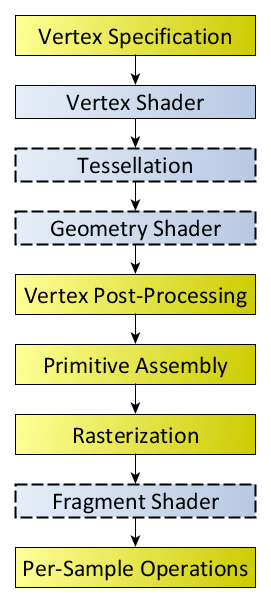
传统图形渲染管线是固定功能+可编程阶段的组合,其核心目标是 将 3D 场景数据转换为 2D 屏幕图像,所有阶段均围绕 "渲染" 这一核心任务设计,灵活性受限。
- 固定功能阶段:如顶点组装、光栅化、深度测试,负责数据流转的固定流程。
- 可编程阶段:如顶点着色器(VS)、片段着色器(PS)、几何着色器(GS),仅能在指定阶段执行特定任务(如 VS 处理顶点位置,PS 输出像素颜色),输入输出格式受管线约束。
而Compute Shader脱离了这一限制,更加注重计算而不是图形渲染。
| 对比维度 | 传统渲染管线(VS/PS 等) | Compute Shader |
|---|---|---|
| 核心目标 | 图形渲染(生成图像) | 通用并行计算(处理数据) |
| 输入输出 | 受管线固定格式约束(如 VS 输入顶点数据) | 无固定约束,可自定义缓冲区 / 纹理 |
| 线程调度 | 由渲染管线自动触发(如每个顶点对应一个 VS 线程) | 手动配置线程网格,驱动程序调度 |
| 资源访问 | 主要为只读(如纹理采样),写操作受限 | 支持读写多种内存资源,灵活控制 |
| 应用场景 | 图形渲染相关(顶点变换、光照计算、纹理采样) | 非图形计算(物理模拟、AI 推理、数据处理) + 图形预处理 |
4.2 Compute Shader与OpenCL、CUDA区别
Compute Shader、CUDA、OpenCL 均基于 GPU 并行计算,但定位、适用场景、编程模型存在本质差异,三者并非替代关系,而是针对不同需求的技术方案。
- Compute Shader :
- 定位:图形 API 内置的通用计算组件,是图形渲染管线的补充扩展,而非独立框架。
- 核心目标:兼顾图形处理与轻量级通用计算,重点解决 "渲染流程中的并行计算需求"(如实时后处理、粒子模拟、渲染数据预处理),支持与渲染管线无缝协同,无需额外安装运行时(依赖图形驱动即可)。
- 核心优势:零额外依赖、图形资源直接复用、开发门槛低(熟悉着色器语言即可上手)。
- CUDA(Compute Unified Device Architecture) :
- 定位:NVIDIA 专属的 独立 GPU 通用计算平台与编程模型,完全脱离图形 API,专注于高性能计算。
- 核心目标:最大化 NVIDIA GPU 的计算潜力,支持复杂并行算法(如分布式计算、深度学习训练、科学计算),提供底层硬件控制能力,追求极致算力与优化空间。
- 核心优势:NVIDIA 硬件深度优化、工具链完善(编译器、调试器、性能分析工具)、支持复杂并行模式(如动态并行、分布式多卡计算)。
- OpenCL(Open Computing Language) :
- 定位:跨平台、跨硬件的 通用计算标准,由 Khronos 组织制定,不绑定特定厂商或硬件类型。
- 核心目标:打破硬件壁垒,让开发者编写一次代码即可在 GPU(NVIDIA/AMD/Intel)、CPU、FPGA 等多种硬件上运行,专注于跨平台并行计算任务。
- 核心优势:硬件兼容性广、标准统一、支持异构计算(多类型硬件协同工作)。
| 对比维度 | Compute Shader | CUDA | OpenCL |
|---|---|---|---|
| 硬件支持 | 所有现代 GPU(NVIDIA/AMD/Intel),依赖图形 API 兼容性 | 仅支持 NVIDIA GPU | 支持 GPU、CPU、FPGA 等多硬件,跨厂商兼容性强 |
| 编程模型 | 基于图形 API 着色器模型,线程层次为"线程 → 工作组 → 线程网格",集成在图形管线中 | 独立编程模型,线程层次为"线程 → 线程块(Block)→ 网格(Grid)",无图形依赖 | 跨平台编程模型,线程层次为"工作项(Work Item)→ 工作组(Work Group)→ NDRange",支持异构调度 |
| 开发语言 | HLSL/GLSL/MSL 等着色器语言(语法类似 C++,但有显存访问、函数限制) | CUDA C/C++、CUDA Fortran 等(基于 C/C++ 扩展,支持完整编程语言特性) | OpenCL C(基于 C 语言扩展)、OpenCL C++ |
| 运行时依赖 | 依赖图形驱动(DirectX/OpenGL/Vulkan 驱动),无需额外安装 | 需安装 NVIDIA CUDA Toolkit(包含运行时、编译器、库文件) | 需安装对应硬件的 OpenCL 驱动与 OpenCL Runtime(如 AMD OpenCL SDK、Intel OpenCL Runtime) |
| 图形协同能力 | 极强(可直接访问渲染管线资源如纹理、顶点缓冲区,无需数据拷贝) | 弱(需通过显存拷贝与图形 API 交互,数据流转延迟高) | 弱(跨硬件图形资源访问复杂,需额外适配,兼容性差) |
| 底层控制能力 | 中等(受图形 API 限制,无法直接操作寄存器、硬件调度器) | 强(可直接控制共享内存、寄存器分配、线程调度策略,支持硬件级优化) | 中等(跨硬件抽象层,底层特性无法直接访问,优化需针对性适配不同硬件) |
| 开发门槛 | 低 - 中(熟悉图形着色器即可上手,无需深入硬件细节) | 中 - 高(需掌握 CUDA 特有语法、NVIDIA GPU 硬件特性、并行算法设计) | 高(需处理跨硬件兼容性、异构调度逻辑,API 复杂) |
| 典型应用场景 | 游戏实时计算、图像后处理、粒子系统、渲染数据预处理 | 深度学习训练、科学计算(分子动力学、气象模拟)、高性能数据处理 | 跨平台数据处理、嵌入式设备并行计算、异构系统中的任务协同 |
4.3 方案交互与选择
根据实际的应用场景选择合适的方案:
- 若项目已基于图形 API(如 DirectX/Vulkan/Unity/Unreal)开发,需在渲染流程中嵌入并行计算(如实时模糊、百万级粒子模拟、顶点动画预处理),优先选择 Compute Shader------ 无需额外依赖,可直接复用纹理、缓冲区等图形资源,开发效率高,且能与渲染管线同步调度,避免数据拷贝延迟。
- 若项目专注于 NVIDIA GPU 平台,且无需图形渲染(如后台 AI 训练、科学计算、大规模矩阵运算),追求极致性能与底层优化,优先选择 CUDA------ 工具链完善,支持复杂并行模式,性能上限远高于 Compute Shader,且能充分利用 NVIDIA 专属硬件特性(如 Tensor Core、Ray Tracing Core)。
- 若项目需支持多硬件平台(如同时兼容 NVIDIA/AMD/Intel GPU 或 CPU/FPGA),且不依赖图形协同,优先选择 OpenCL------ 跨平台优势显著,可避免为不同硬件重复开发,但需投入更多精力处理兼容性问题(如不同 GPU 的内存模型差异、性能优化适配)。
针对方案混用的场景如何做好交互:
- Compute Shader 与 CUDA:在 NVIDIA 平台上,二者可共享 GPU 内存资源(如 CUDA 分配的缓冲区可通过 DirectX/Vulkan 绑定为 Compute Shader 可访问的资源),但无法直接调用彼此的内核函数。典型混合场景:用 CUDA 训练深度学习模型,将模型参数传入 Compute Shader 实现实时推理(如游戏中的 AI 角色行为决策、图像超分)。
- Compute Shader 与 OpenCL:部分图形 API 支持 OpenCL 与图形资源共享(如 OpenGL 的 CL-GL 共享对象),但跨平台兼容性较差,实际应用中较少使用。混合场景多为:用 OpenCL 处理跨硬件的预处理数据,再将结果传递给 Compute Shader 用于渲染。
- CUDA 与 OpenCL:二者无直接互通性,代码无法直接复用,但可通过数据文件(如二进制缓冲区)交换计算结果。由于 CUDA 仅支持 NVIDIA 硬件,OpenCL 多作为 CUDA 的跨平台替代方案(如 AMD GPU 上的高性能计算)。
5 案例:3x3高斯模糊的实现对比
本节以3x3原始高斯模糊(不拆分一维卷积)为例,对比OpenGL中Compute Shader与Graphics Shader(片元着色器)的实现逻辑、代码结构及调用方式,核心目标是对每个像素采样其3x3邻域颜色,与高斯核权重加权求和得到模糊结果。
5.1 Graphics Shader 实现
Graphics Shader依托传统图形管线完成模糊计算,核心逻辑集中在片元着色器(顶点着色器仅传递全屏四边形的纹理坐标,无额外逻辑,故省略)。片元着色器对每个像素执行3x3高斯卷积,最终将结果输出到绑定的帧缓冲(FBO)纹理中。
glsl
#version 330 core
out vec4 FragColor;
in vec2 TexCoord; // 顶点着色器传递的纹理坐标
uniform sampler2D inputTex; // 待模糊的输入纹理
uniform vec2 texelSize; // 纹理像素步长 (1/纹理宽度, 1/纹理高度)
// 3x3归一化高斯核(权重和为1,避免亮度偏差)
const float kernel[9] = float[](
1.0/16.0, 2.0/16.0, 1.0/16.0,
2.0/16.0, 4.0/16.0, 2.0/16.0,
1.0/16.0, 2.0/16.0, 1.0/16.0
);
void main()
{
// 预定义3x3邻域的纹理坐标偏移(覆盖当前像素的8个邻域+自身)
vec2 offset[9] = vec2[](
vec2(-texelSize.x, -texelSize.y), // 左上
vec2(0.0f, -texelSize.y), // 中上
vec2(texelSize.x, -texelSize.y), // 右上
vec2(-texelSize.x, 0.0f), // 左中
vec2(0.0f, 0.0f), // 中心
vec2(texelSize.x, 0.0f), // 右中
vec2(-texelSize.x, texelSize.y), // 左下
vec2(0.0f, texelSize.y), // 中下
vec2(texelSize.x, texelSize.y) // 右下
);
vec3 result = vec3(0.0);
// 遍历3x3邻域,加权求和完成卷积
for(int i = 0; i < 9; i++)
{
result += texture(inputTex, TexCoord + offset[i]).rgb * kernel[i];
}
FragColor = vec4(result, 1.0); // 输出模糊后的颜色(Alpha通道设为1)
}C++侧通过绑定FBO(帧缓冲)将模糊结果输出到纹理,核心调用逻辑如下:
cpp
// 绑定输出纹理对应的FBO,所有绘制结果将写入该FBO的颜色附件
glBindFramebuffer(GL_FRAMEBUFFER, fbo);
glClear(GL_COLOR_BUFFER_BIT); // 清空FBO颜色缓冲区
// 激活高斯模糊的图形着色器程序
glUseProgram(graphicsShaderProgram);
// 设置着色器Uniform变量:输入纹理单元、纹理像素步长
glUniform1i(glGetUniformLocation(graphicsShaderProgram, "inputTex"), 0);
glUniform2f(glGetUniformLocation(graphicsShaderProgram, "texelSize"),
1.0f / texWidth, 1.0f / texHeight);
// 绑定输入纹理到纹理单元0(与Uniform设置的单元号对应)
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, inputTex);
// 渲染全屏四边形(覆盖整个FBO尺寸),触发每个像素的片元着色器执行
glBindVertexArray(VAO);
glDrawArrays(GL_TRIANGLES, 0, 6);
// 解绑资源,恢复默认状态
glBindVertexArray(0);
glBindFramebuffer(GL_FRAMEBUFFER, 0);5.2 Compute Shader 实现
Compute Shader脱离图形管线的"渲染"依赖,以"工作组-工作项"的并行模型直接处理每个像素,核心卷积逻辑与片元着色器一致,但输入输出方式、执行调度逻辑不同:
glsl
#version 430 core
// 定义本地工作组尺寸(16x16,可根据GPU硬件特性调整,如32x32)
layout (local_size_x = 16, local_size_y = 16) in;
// 输入纹理(采样用,绑定到采样器单元0)
layout (binding = 0) uniform sampler2D inputTex;
// 输出图像纹理(仅写,绑定到图像单元0,格式与输入纹理一致)
layout (binding = 0, rgba8) writeonly uniform image2D outputTex;
uniform vec2 texelSize; // 纹理像素步长 (1/纹理宽度, 1/纹理高度)
// 3x3归一化高斯核(与Graphics Shader完全一致)
const float kernel[9] = float[](
1.0/16.0, 2.0/16.0, 1.0/16.0,
2.0/16.0, 4.0/16.0, 2.0/16.0,
1.0/16.0, 2.0/16.0, 1.0/16.0
);
void main()
{
// 获取当前工作项的全局坐标(对应输出纹理的像素坐标)
ivec2 pixelCoord = ivec2(gl_GlobalInvocationID.xy);
// 将像素坐标转换为0~1范围的纹理UV坐标,用于采样输入纹理
vec2 texCoord = vec2(pixelCoord) * texelSize;
// 3x3邻域纹理偏移(与Graphics Shader一致)
vec2 offset[9] = vec2[](
vec2(-texelSize.x, -texelSize.y),
vec2(0.0f, -texelSize.y),
vec2(texelSize.x, -texelSize.y),
vec2(-texelSize.x, 0.0f),
vec2(0.0f, 0.0f),
vec2(texelSize.x, 0.0f),
vec2(-texelSize.x, texelSize.y),
vec2(0.0f, texelSize.y),
vec2(texelSize.x, texelSize.y)
);
// 执行3x3高斯卷积(核心逻辑与片元着色器完全一致)
vec3 result = vec3(0.0);
for(int i = 0; i < 9; i++)
{
result += texture(inputTex, texCoord + offset[i]).rgb * kernel[i];
}
// 将卷积结果直接写入输出图像纹理的对应像素位置
imageStore(outputTex, pixelCoord, vec4(result, 1.0));
}C++侧需手动调度计算工作组,并处理纹理与图像单元的绑定、计算同步,核心调用逻辑如下:
cpp
// 激活高斯模糊的计算着色器程序
glUseProgram(computeProgram);
// 设置Uniform变量:纹理像素步长
glUniform2f(glGetUniformLocation(computeProgram, "texelSize"),
1.0f / texWidth, 1.0f / texHeight);
// 绑定输入纹理到采样器单元0(与Compute Shader中binding=0对应)
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, inputTex);
// 绑定输出纹理到图像单元0(与Compute Shader中image2D的binding=0对应)
// 参数说明:图像单元、纹理ID、层级、是否分层、层索引、访问模式、纹理格式
glBindImageTexture(0, outputTex, 0, GL_FALSE, 0, GL_WRITE_ONLY, GL_RGBA8);
// 计算工作组数量:向上取整,确保覆盖所有像素(本地工作组尺寸16x16)
int workGroupX = (texWidth + 15) / 16;
int workGroupY = (texHeight + 15) / 16;
// 调度计算:启动workGroupX×workGroupY×1个工作组,每个工作组含16×16×1个工作项
glDispatchCompute(workGroupX, workGroupY, 1);
// 内存屏障:确保计算着色器对图像纹理的写入完成后,后续操作才能读取该纹理
glMemoryBarrier(GL_SHADER_IMAGE_ACCESS_BARRIER_BIT);5.3 核心差异分析
| 维度 | Graphics Shader(片元着色器) | Compute Shader |
|---|---|---|
| 执行依赖 | 依赖图形管线,需渲染全屏四边形触发片元执行 | 独立计算管线,无渲染依赖,直接调度工作组执行 |
| 输出方式 | 依赖FBO绑定纹理作为颜色附件,通过片元输出(FragColor)写入 | 直接通过imageStore写入绑定的image2D纹理,无需FBO |
| 坐标体系 | 基于纹理UV坐标(0~1),由顶点着色器传递 | 基于全局工作项ID(gl_GlobalInvocationID),直接对应像素绝对坐标 |
| 并行调度 | 由OpenGL图形管线自动调度,按片元并行 | 手动指定工作组尺寸和数量,按"工作组-工作项"并行 |
| 同步机制 | 渲染完成后自动同步,无需手动干预 | 需调用glMemoryBarrier确保内存访问同步 |
| 适用场景 | 与渲染强关联的后处理(如相机画面模糊) | 通用并行计算(如离线纹理处理、批量数据计算) |
| 灵活性 | 受图形管线约束(需顶点数据、FBO) | 无图形相关约束,可处理任意维度数据 |
对于3x3高斯模糊这类简单操作,两者的计算效率接近,但Compute Shader更适合脱离渲染流程的"纯计算"场景,而Graphics Shader更贴合OpenGL传统的"渲染-后处理"链路。从代码结构看,核心卷积逻辑完全复用,差异主要体现在管线依赖、资源绑定和执行调度层面。
6 总结
Compute Shader作为GPU通用计算的核心载体,是图形技术与并行计算融合的关键产物。它打破了传统渲染管线的功能桎梏,通过"线程-工作组-线程网格"的结构化并行模型,将GPU数百亿晶体管的硬件潜能转化为实际计算能力,实现了图形任务与通用计算的高效协同。
从技术本质来看,Compute Shader的价值不仅在于"释放算力",更在于其"灵活适配性"------与GPU硬件架构的深度绑定(如SM与工作组的映射、多级内存的优化利用)使其能精准匹配硬件特性,而与图形API的原生集成则降低了开发与部署成本,成为渲染流程中并行计算任务的优选方案。通过与传统渲染管线、CUDA、OpenCL的对比可见,Compute Shader以"图形协同能力强、零额外依赖"为核心优势,在游戏实时后处理、粒子模拟、渲染数据预处理等场景中展现出不可替代的