1.ROS2安装(使用鱼香ROS工具)
1.1.准备
建议准备一个干净、换好源的 ubuntu 20.04 以上的虚拟机(建议清华源),我的是 Ubuntu 22.04 ,本教程也适用其他 ROS2 版本。
查看ubuntu 版本
c
lsb_release -a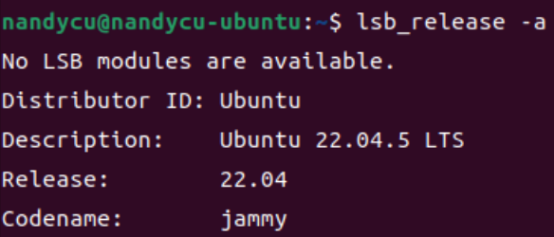
根据自己的 ubuntu 的版本选择 ROS2 版本 (我的是 ubuntu 22.04 所以对应ROS2版本为 humble)
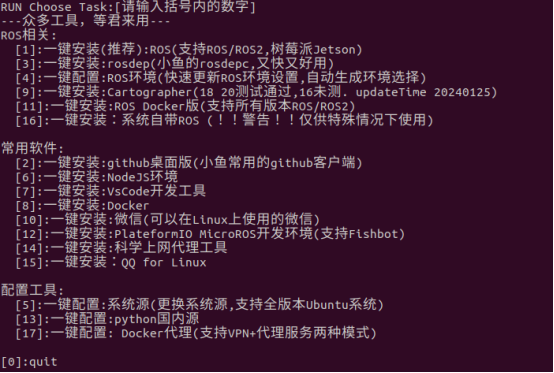
要使用小鱼的一键安装系列,需要下载一个鱼香大佬写的脚本,然后执行这个脚本,进行ROS的安装与环境的配置
下载脚本并执行脚本
c
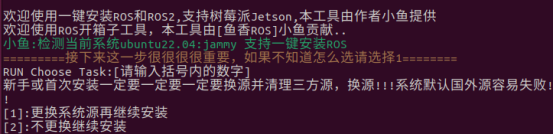
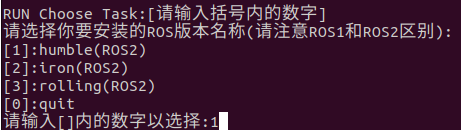
wget http://fishros.com/install -O fishros && . fishros然后就会看见选择安装界面,我们看界面可以看到小鱼的脚本还可以支持很多工具安装,这里我们选择 1 ROS安装
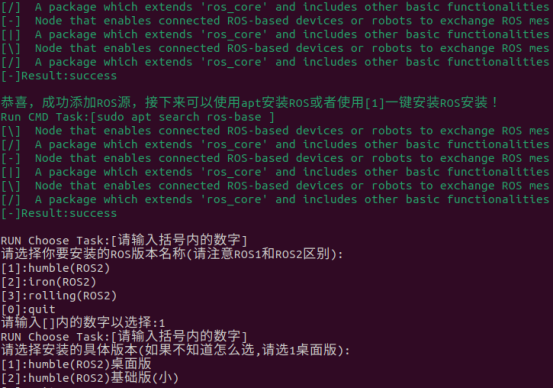
让你选择是否按照他提供的源进行安装,因为我己经换了源了这里 选择 2,如果没换源可以选 1。根据自己的实际情况选择即可
到这里就是选择ROS版本 ,这里我选择 1 humble(ROS2)
Desktop 版 (推荐)包含: ROS, RViz, demos, tutorials。base版仅包含:Communication libraries, message packages, command line tools.。不包含 GUI tools。(新手直接选桌面版) 这里选 1,后面就进行安装了(大概几分钟)
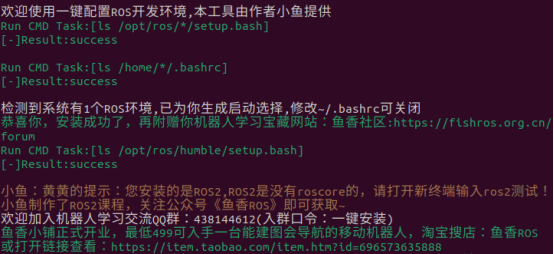
显示这个表示ROS2安装完成
1.2.配置rosdep(可选)
在使用许多 ROS 工具之前,需要初始化 rosdep,有些功能包源码编译需要rosdep 来安装这些系统依赖项,不配置也不影响 ROS 使用,所以后面需要时再来配置也可以。
下载脚本并执行脚本 (因为每次执行这个脚本后,都会自动删除脚本,所以需要重新执行)
c
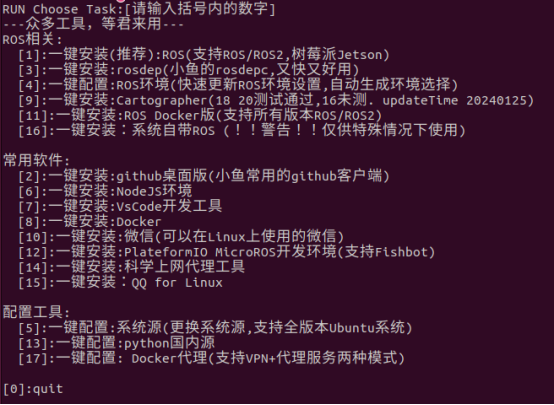
wget http://fishros.com/install -O fishros && . fishros这里我们选择 3 配置rosdep
安装好后显示如下
在终端输入rosdepc update进行配置,显示这个表示配置成功
(注:使用小鱼ROS一键安装rosdep,在后续使用时请将rosdep替换为rosdepc使用)
1.3.测试
在一个终端中,输入命令:
c
ros2 run demo_nodes_cpp talker在另一个终端中,输入命令:
c
ros2 run demo_nodes_py listener
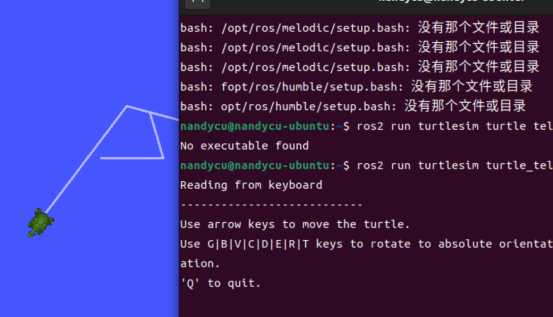
1.4.运行海龟测试
首先打开小海龟页面,运行下面命令
c
ros2 run turtlesim turtlesim_node
再运行键盘控制器命令,就可以通过上下左右键来控制小海龟移动
c
ros2 run turtlesim turtle_teleop_key